Изобретение относится к области судостроения, в частности системам управления движением специальными судами, оборудованным сбрасываемыми изделиями.
Известны устройства управления движением судна (патент России №2133491), которые поддерживают заданное состояние (движение судна в пространстве) при появлении сильных возмущающих воздействий (сброс специальных изделий: трала, геодезического буя, ложной цели и т.д.).
В качестве прототипа нами принята система стабилизации судна (патент России №2171204), которая содержит задатчик рассогласования, датчик угла дифферента, датчик угловой скорости, датчик угла перекладки руля, выходы которых подключены к входам усилителя. Выход усилителя подключен к входу рулевого привода. Система также содержит компенсирующие органы, которые представляют из себя командный блок («блок логики»), программный блок («задатчик уставок») и цистерны, заполняемые водой или продуваемые воздухом высокого давления. Цистерны создают гидростатические силы и моменты, существенно повышая эффективность управления судном после сброса изделия.
Недостатками рассмотренных устройств являются:
- сложность устройства автоматического управления комплексом исполнительных средств высокой эффективности для управления весьма инерционным объектом (каковым является судно) при отсутствии контроля и диагностики,
- невозможность своевременного выявления сбоя в работе устройства, а следовательно, принятия своевременных корректировок в процесс управления инерционным объектом при сбое устройства,
- исключение из процесса управления человека-оператора ввиду отсутствия какой-либо информации о состоянии и параметрах инерционного процесса с ответственного момента сбрасывания изделия до выхода судна в заданную безопасную область («дискомфорт состояния оператора»).
Целью предлагаемого изобретения является создание устройства, обеспечивающего заданную точность стабилизации судна при появлении сильных возмущений (величина которых и время действия заранее достоверно известна), с диагностированием исправности состояния основных блоков устройства. Кроме того (что весьма важно), с момента сбрасывания изделия осуществляется многократное прогнозирование будущего состояния судна до момента времени окончания переходного процесса (выхода судна в заданную безопасную область), что позволит исключить отмеченные выше недостатки.
Рассмотрим как это происходит в предложенном устройстве. В систему стабилизации судна (наш прототип), содержащую: замкнутый контур управления рулями, командный блок и программный блок, обеспечивающие программное по времени управление вторым средством стабилизации - балластной цистерной, дополнительно вводятся: модель суммирующего усилителя, модель рулевого привода, модель программного блока, модель балластной цистерны, модель судна, модель судна в ускоренном времени и пять индикаторов сбоев, первый и второй входы первого индикатора сбоев соединены соответственно с выходом суммирующего усилителя и выходом модели суммирующего усилителя, первый и второй входы второго индикатора соединены соответственно с выходом рулевого привода и с выходом модели рулевого привода, первый и второй входы третьего индикатора соединены соответственно с выходом балластной цистерны и выходом модели балластной цистерны, первый и второй входы четвертого индикатора соединены соответственно с выходом датчика угловой скорости и с выходом модели судна, два входа которой соединены соответственно с выходом балластной цистерны и выходом модели рулевого привода, к входу которой подключен выход модели суммирующего усилителя, к трем входам последнего подключены выходы датчиков: угла дифферента, угловой скорости и положения руля, а к четвертому входу подключен задатчик угла дифферента, первый и второй входы пятого индикатора соединены соответственно с выходом модели судна в ускоренном времени и с выходом задатчика угла дифферента, выходы датчика угла дифферента и датчика угловой скорости подключены соответственно к первому и второму входам модели судна в ускоренном времени, третий и четвертый вход которой подключены к выходу модели балластной цистерны и выходу модели программного блока, выходы командного блока соединены с входом модели программного блока и входом программного блока. выход которого соединен с входом балластной цистерны, вход модели балластной цистерны соединен с выходом модели программного блока.
Следует заметить:
- величина воздействия от сбрасываемых изделий для рассматриваемых нами судов заранее достоверно известна так же, как и время начала и окончания действия воздействия,
- реакция судна проявляется только спустя значительное время, и если произойдет какой-либо сбой в устройстве, то это может привести к невосполнимой аварии, в случае непринятия своевременных защитных мер.
На чертеже приведена блок-схема предлагаемого устройства.
Устройство управления судном с диагностикой содержит: датчик угла дифферента 1, задатчик угла дифферента 2, датчик угловой скорости 3, датчик положения руля 4, суммирующий усилитель 5, рулевой привод 6, командный блок 7, программный блок (набор программ включения заполнения (осушения) балластной цистерны во времени и средства управления клапанами цистерны) 8, балластную цистерну (управляющий орган движения судна) 9, модель суммирующего усилителя 10, модель рулевого привода 11, модель программного блока 12, модель балластной цистерны 13, модель судна 14, модель судна в ускоренном времени 15, первый-пятый индикаторы сбоев 16-20, судно (объект управления) 21,
В качестве датчика 1, задатчика угла дифферента 2 и датчика положения руля 4 могут использоваться серийно выпускаемые измерители угла с точностью не ниже 5%. Датчик угловой скорости 3 типовой ДУС-М с диапазоном измерения 0.05-1.5 град./сек. Суммирующий усилитель 5 может быть реализован на операционном усилителе типа 140-УД-6. Программный блок 7 включает набор программ - команд на включение той или иной программы в программном блоке 8. Программный блок 8 может быть реализован на типовых логических счетно-решающих элементах или микроконтроллере. (Составляется набор временных программ включений балластной цистерны, при котором судно не выходит из допустимого коридора по заданной точности удержания угла дифферента, при этом одновременно обеспечивается минимально возможное отклонение судна от равновесного состояния после сброса конкретного спец. объекта).
Модели 10, 11, 12, 13, 14, 15 могут реализовываться либо на элементах аналоговой вычислительной техники, либо на процессорах (математические модели - 11, 12, 13, 14, 15 могут быть в ряде случаев представлены как инерционные звенья первого или второго порядка, (подробный вариант реализации математической модели 15 приведен ниже в разделе работа устройство). Индикаторы сбоев 16-20 могут реализовываться на операционных усилителях типа 140-УД-6, на выходах которых подключены светодиоды
Описание работы устройства.
Устройство управления судна с диагностикой позволяет стабилизировать судно по углу дифферента с малыми ошибками при задании больших возмущений и диагностировать исправность основных блоков устройства с обобщенным контролем текущего процесса стабилизации судна и индикации о возможном, будущем уходе судна из допустимой области путем прогнозирования процесса стабилизации в ускоренном масштабе времени.
В начале процесса одержания судна (после сбрасывания изделия) замкнутая система, состоящая из четырех датчиков 1, 2, 3, 4, сигналы с которых поступают на вход суммирующего усилителя 5, управляет рулевым приводом 6, отклоняя руль и одерживая судно. Однако использование только руля оказывается недостаточным для удержания судна в допустимой области параметров. Для повышения точности стабилизации дополнительно используется программное управление более эффективным средством, каковыми являются балластные цистерны. Это осуществляется с помощью выдачи из командного блока 7 сигнала в программный блок 8 о моменте времени сбрасывания (Т0) и номере программы заполнения-продувания балластной цистерны, соответствующей конкретному сбрасываемому объекту. После прихода такой команды в программном блоке 8 подключается из набора программ - заданная, которая включает клапана на заполнение-продувание балластной цистерны 9.
Программы строятся предварительно по результатам математического моделирования процесса стабилизации судна при сбрасывании спец. объекта и работе средств стабилизации близко к оптимальному по точности на основании того, что математическая модель движения судна достоверно известна и известен характер изменения возмущающих и компенсирующих воздействий от перекладки руля и изменения момента плавучести - М от заполнения-продувания балластной цистерны.
Рассмотрим процесс диагностики исправности блоков устройства, происходящий одновременно с процессом управления движением судна при сбросе изделия.
1. Исправность блока формирования скорости перекладки руля фиксируется первым индикатором 16, светодиод начинает светиться, если сигналы, приходящие на оба входа индикатора 16, различаются более чем на фиксированную величину С1 т.е.:

где d/dtδ - модуль сигнала, который поступает с выхода суммирующего усилителя 5,
d/dtδМ - модуль задания скорости перекладки руля, сигнал выработан моделью суммирующего усилителя 10, на вход которого приходят сигналы с датчиков 1, 2, 3, 4. Усилитель 10 практически не отличается от суммирующего усилителя 5, поэтому при исправности блока выработки скорости перекладки руля разность сигналов будет практически равна нулю:
d/dtδ-d/dtδМ=0<C1,
т.е. индикатор 16 светиться не будет.
2. Исправность работы рулевого привода фиксируется вторым индикатором 17, индикатор загорается при сбое. Это происходит если сигналы, приходящие на оба входа индикатора 17, различаются более чем на фиксированную величину С2 т.е.:

где δ - сигнал угла перекладки руля, поступающий с выхода рулевого привода 5,
δМ - сигнал модельного угла перекладки руля, поступающий с выхода модели рулевого привода 11, на вход которой приходит сигнал модельной угловой скорости - d/dtδМ модели усилителя 10. При отказе рулевого привода условие (2) выполняется и второй индикатор 17 будет светиться.
3. Исправность работы балластной цистерны 9 фиксируется на третьем индикаторе 18, информация о сбое появится если сигналы, приходящие на оба входа индикатора 18, различаются более чем на фиксированную величину С3 т.е.:

где М - гидростатический момент, создаваемый балластной цистерной 9,
МM - модельный гидростатический момент, создаваемый на выходе модели балластной цистерны 3, на вход которой поступает команда на продувание-заполнение из модели программного блока 12.
4. Исправность ДУС а-3 фиксируется четвертым индикатором 19. Индикатор загорается при сбое, это происходит если сигналы угловой скорости, приходящие на оба входа индикатора 19, различаются более чем на фиксированную величину С4 т.е.:

где ω - угловая скорость судна, вырабатываемая ДУСом-3.
ωM - модельная угловая скорость судна вырабатываемая на выходе модели судна 14,(модель судна может реализовываться вида:

где М - гидростатический момент, поступающий с выхода балластной цистерны 9,
δM - модельный угол отклонения руля, поступающий с выхода модели рулевого привода 11,
 ωM - модельные производная и угловая скорость судна в натуральном времени.
ωM - модельные производная и угловая скорость судна в натуральном времени.
5. Диагностика выхода судна в допустимую область после сбрасывания изделия осуществляется путем сравнения заданного значения угла дифферента «ψзд» с прогнозируемым значением «ψпредск», если:
|ψпредск|-|ψЗД|>C5
то сработает пятый индикатор 20, на первый вход которого поступает сигнал «ψЗД», а на второй вход «ψпредск». Рассмотрим процесс выработки «ψпредск».
Вычисление прогнозируемой величины угла дифферента в будущий момент времени «Тпрог», когда судно должно выйти в заданную область, осуществляется моделью судна в ускоренном времени 15.
Модель судна в ускоренном времени вычисляет значение утла дифферента в будущий момент времени - ТПРОГ, величина которого в момент времени сбрасывания изделия «Т0» равна:
Тпрог=Т0+ΔТ,
где ΔТ - время прогноза (задается заранее).
Количество циклов прогноза от «i1,» до «in,» при этом связано с интервалом времени повторения цикла прогноза «Δti»:
in,=(Tпрог-T0)/Δti
При каждом цикле прогнозирования от i1 до in вычисляется будущее значение угла дифферента в момент времени «Тпрог», начиная с момента времени сбрасывания изделия «T0». Для «i1» цикла измеренные в момент времени Т0 значение угла дифферента «Ψ», поступает с датчика угла дифферента 1, угловая скорость «ω» поступает с датчика 3, величина гидростатического момента «М» поступает с выхода балластной цистерны 9. Все перечисленные сигналы принимаются в качестве начальных условий для вычисления предсказанного значения «Ψпредск», На вход модели судна в ускоренном времени также поступают:
- программа запуска в работу модели 15 в момент «T0» - сигнал с блока 12,
- программные значения гидростатического момента «Mму» и программные значения угла перекладки руля «δму», вырабатываемые в ускоренном масштабе времени в модели программного блока 12.
Для второго цикла прогнозирования «i2» интервал времени прогнозирования сокращается на величину ΔtI и равен;
Тпрог2=Тпрог-(Т0+Δti),
в качестве начальных условий принимаются измеренные значения угла дифферента и угловой скорости в момент времени (Т0+Δti). Программные значения «ММУ» и «δМУ», также сокращаются на ΔtIY, т.к. начинаются в момент времени (Т0+Δti)у (в ускоренном масштабе времени).
Для последнего цикла прогнозирования «in» время начала прогнозирования будет: T0n=(Т0+Δti·in-1).
В качестве математической модели углового движения судна может приниматься система дифференциальных уравнений вида:

Ψму=ωму
ΨПРОГ=ΨМУ+Ψ9i
МM0i, δ0i, ω0i, Ψ9i - измеренные параметры перед началом «ii» цикла прогноза, принимаемые в качестве начальных значений при расчете ii -цикла прогноза,
где ММУ=ƒ1(τ, №программы),
δМУ=ƒ2(τ, №программы),
 - производная угловой скорости судна в ускоренном времени,
- производная угловой скорости судна в ускоренном времени,
ωУ - модельная угловая скорость судна в ускоренном времени,
ΨМУΨМУ - модельный угол дифферента и производная в ускоренном времени,
τ>in·t - ускоренное время,
t - реальное время.
Проведенное контрольное моделирование устройства при возможных обоях подтвердило работоспособность и целесообразность использования его.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2306239C1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2312789C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2305050C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПО ГЛУБИНЕ | 2012 |
|
RU2513157C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
Изобретение относится к судостроению и касается создания систем управления судном с диагностикой, имеющим оборудование для сбрасывания изделий. Устройство управления судном с диагностикой имеет датчики угла дифферента (УД), угловой скорости, положения руля и задатчик УД, выходы которых подключены соответственно к первому, второму, третьему и четвертому входам суммирующего усилителя, выход которого соединен с входом рулевого привода. Выход командного блока соединен через программный блок с клапаном входа балластной цистерны. Устройство имеет модель суммирующего усилителя, модель рулевого привода, модель программного блока, модель балластной цистерны, модель судна, модель судна в ускоренном времени и первый-пятый индикаторы сбоев (ИС). Первый и второй входы первого ИС соединены соответственно с выходом суммирующего усилителя и с выходом модели суммирующего усилителя. Первый и второй входы второго ИС соединены соответственно с выходом рулевого привода и с выходом модели рулевого привода. Первый и второй входы третьего ИС соединены соответственно с клапаном выхода балластной цистерны и с клапаном выхода модели балластной цистерны. Первый и второй входы четвертого ИС соединены соответственно с выходом датчика угловой скорости и с выходом модели судна, первый и второй входы которой соединены соответственно с клапаном выхода балластной цистерны и выходом модели рулевого привода, вход последней соединен с выходом модели суммирующего усилителя. Первый и второй входы пятого ИС соединены соответственно с выходом модели судна в ускоренном времени и с выходом задатчика УД, выходы датчика УД, задатчика УД, датчика угловой скорости и датчика положения руля подключены соответственно к первому, второму, третьему и четвертому входам модели суммирующего усилителя, выходы датчика УД, датчика угловой скорости и клапан выхода балластной цистерны подключены соответственно к первому, второму и третьему входам модели судна в ускоренном времени, к четвертому входу которой подключен первый выход модели программного блока, второй выход которой соединен с клапаном входа модели балластной цистерны. Технический результат реализации изобретения состоит в обеспечении заданной стабилизации судна по дифференту с помощью системы диагностики. 1 ил.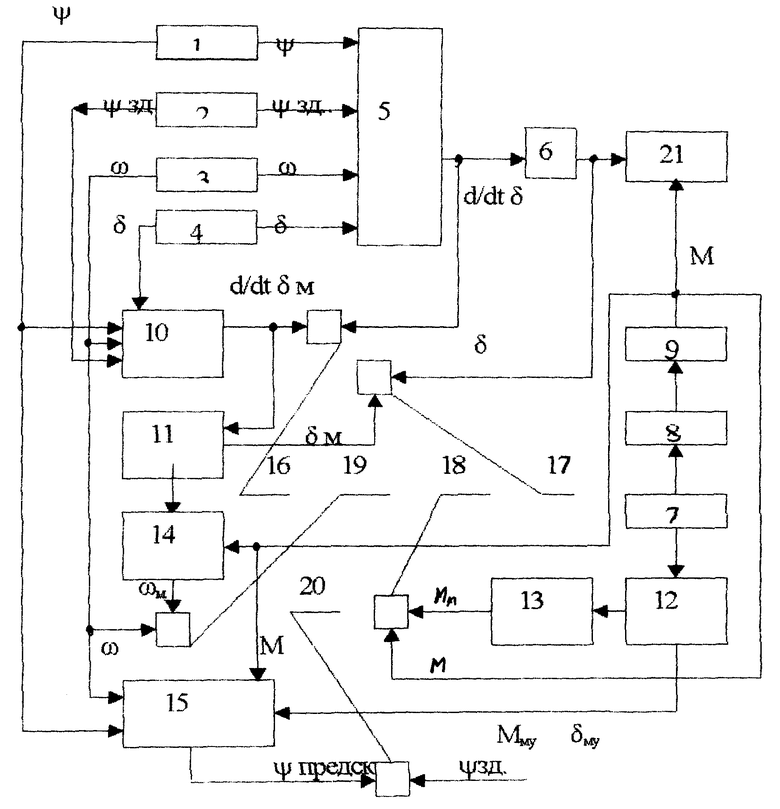
Устройство управления судном с диагностикой, содержащее датчик угла дифферента, задатчик угла дифферента, датчик угловой скорости, датчик положения руля, выходы которых подключены соответственно к первому, второму, третьему и четвертому входам суммирующего усилителя, выход которого соединен с входом рулевого привода, командный блок, выход которого соединен через программный блок с клапаном входа балластной цистерны, отличающееся тем, что дополнительно содержит модель суммирующего усилителя, модель рулевого привода, модель программного блока, модель балластной цистерны, модель судна, модель судна в ускоренном времени и первый-пятый индикаторы сбоев, первый и второй входы первого индикатора сбоев соединены соответственно с выходом суммирующего усилителя и с выходом модели суммирующего усилителя, первый и второй входы второго индикатора сбоев соединены соответственно с выходом рулевого привода и с выходом модели рулевого привода, первый и второй входы третьего индикатора сбоев соединены соответственно с клапаном выхода балластной цистерны и с клапаном выхода модели балластной цистерны, первый и второй входы четвертого индикатора сбоев соединены соответственно с выходом датчика угловой скорости и с выходом модели судна, первый и второй входы которой соединены соответственно с клапаном выхода балластной цистерны и выходом модели рулевого привода, вход последней соединен с выходом модели суммирующего усилителя, первый и второй входы пятого индикатора сбоев соединены соответственно с выходом модели судна в ускоренном времени и с выходом задатчика угла дифферента, выходы датчика угла дифферента, задатчика угла дифферента, датчика угловой скорости и датчика положения руля подключены соответственно к первому, второму, третьему и четвертому входам модели суммирующего усилителя, выходы датчика угла дифферента, датчика угловой скорости и клапан выхода балластной цистерны подключены соответственно к первому, второму и третьему входам модели судна в ускоренном времени, к четвертому входу которой подключен первый выход модели программного блока, второй выход которой соединен с клапаном входа модели балластной цистерны.
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| УСТРОЙСТВО РЕГУЛЯРНО-ПЕРИОДИЧЕСКОГО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРИЧЕСКИХ СРЕДСТВ АВТОМАТИЗАЦИИ | 2001 |
|
RU2196340C2 |
| US 6681712 B1, 27.01.2004. | |||

