Изобретение относится к летательным аппаратам.
В качестве прототипа известен ЛА, содержащий машущие крылья с приводом и механизмы изменения пространственного положения крыла и амплитудных характеристик, включающий систему зубчатых колес. При этом ЛА имеет строго определенное положение центра тяжести и снабжен рулями управления (см. Патент Германии 631429, кл. 62 В 33, 1934 г.). Известен так же ЛА - Патент США 2021627, кл. 244-11, 1935 г. , характеристики которого существенно ниже предыдущего.
Предлагаемый ЛА под названием махолет отличается простотой схемы, жесткой динамически уравновешенной системой зубчатого привода и крыльев, абсолютно симметричной оси конструкции. К тому же все темные места данной схемы объясняются теоретически на элементарном уровне.
Сущность изобретения поясняется чертежами, где на фиг.1 показана принципиальная схема махолета; на фиг.2 - схема исполнительного механизма махолета; на фиг.3 - угловые параметры начального положения крыльев махолета; на фиг. 4 - опора вращения крыла; на фиг.5 - траектории движения звеньев механизма вращения крыла; на фиг.6 - крепление крыла к базе; на фиг.7 - положение центра тяжести махолета; на фиг.8 - схема движения периферии крыла; на фиг. 9 - схема результирующих подъемных сил; на фиг.10 - распределение сил; на фиг.11 - схема последовательности действия сил; на фиг.12 - движение центра тяжести; на фиг.13 - возможное расположение центра тяжести; на фиг.14 - схема сбалансированности конструкции; на фиг.15 - эволюции движений при управлении; на фиг.16 - сочетание параметров подъемной силы; на фиг.17 - система сил при вертикальном взлете и посадке; на фиг.18 - траектории движения периферии крыльев; на фиг.19 - схема равнодействующих сил; на фиг.20 - схема регулирования соотношения между Сx и Сy; на фиг.21 - результирующая схема сил; на фиг. 22 - сдвиг коленчатого вала на первой паре крыльев; на фиг.23 - схема отбора мощности на все виды управления.
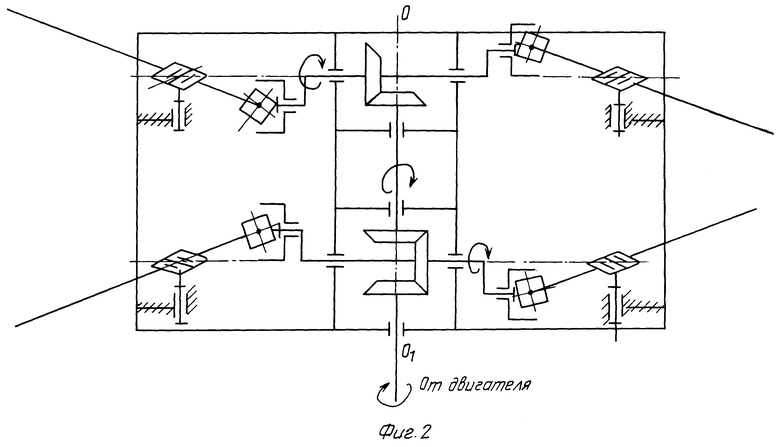
На фиг.1 обозначено: 1 - база крыла, 2 - опора вращения крыла, 3 - карданная передача, 4 - коленчатый вал 1, 5 - груз, 6 - блок управления, 7 - конусная передача 1, 8 - корпус, 9 - промежуточный вал, 10 - конусная передача 2, 11 - коленчатый вал, 12 - вал, 13 - муфта сцепления, 14 - корпус рамы, 15 - коробка передач, 16 - двигатель, 17 - хвостовая часть.
Принципиальная схема махолета
Это начало описания схемы махолета, т.к. на ней показаны не крылья, а база крыла или, по-другому, посадочное место крыла фиг.1.
Конструкция начинается с хвостовой части 17, на которой находится рама 14. На раме установлен двигатель 16 и коробка передач 15. Муфта сцепления 13 соединяет двигатель и коробку с валом 12 и конусной передачей 10, которая соединена через промежуточный вал 9 с конусной передачей 7. На обеих конусных передачах 10 и 7 имеется коленвал 11, 4. На концах коленвалов находятся карданные передачи 3 (4 шт.), которые передают вращение базе крыла 1 (4 шт.) через опору вращения крыла 2 (4 шт.). На фиг.1 карданная передача и опора вращения крыла показаны условно, подробно они показаны на фиг.2.
В чем заключается преимущество данной схемы: во-первых, в жесткости зубчатого привода и в гибкожестком соединении крыльев и привода, во-вторых, в симметрии и динамической уравновешенности, в третьих, в исключительной простоте. Эта простота позволяет избежать потерь при работе данной конструкции, что очень важно, т. к. основные потери КПД происходят на крыльях, т.е. в исполнительном механизме. Причем нужно сказать, что данная схема обеспечивает движение базы крыла одновременно по конусной траектории, причем постоянным в горизонтальном положении самой базы 1 (фиг.1).
Рассмотрим подробнее работу крыльев.
Угловые параметры начального положения крыльев
Рассмотрим конусные траектории движения крыльев и их начальное положение на них.
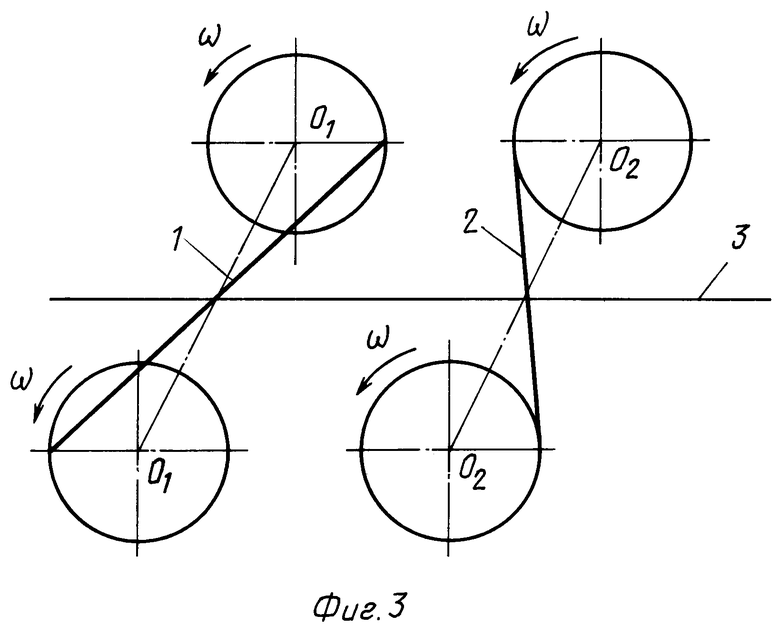
Итак, махолет с одной парой крыльев, вращающихся в одну сторону по конусной траектории через 180o, как показано на фиг.3. Положения крыльев 1 и 2 на фиг.3 соответствуют начальному, где 3 - ось симметрии конструкции.
При этом площадь переднего крыла больше площади заднего крыла S1>S2.
Опора вращения крыла
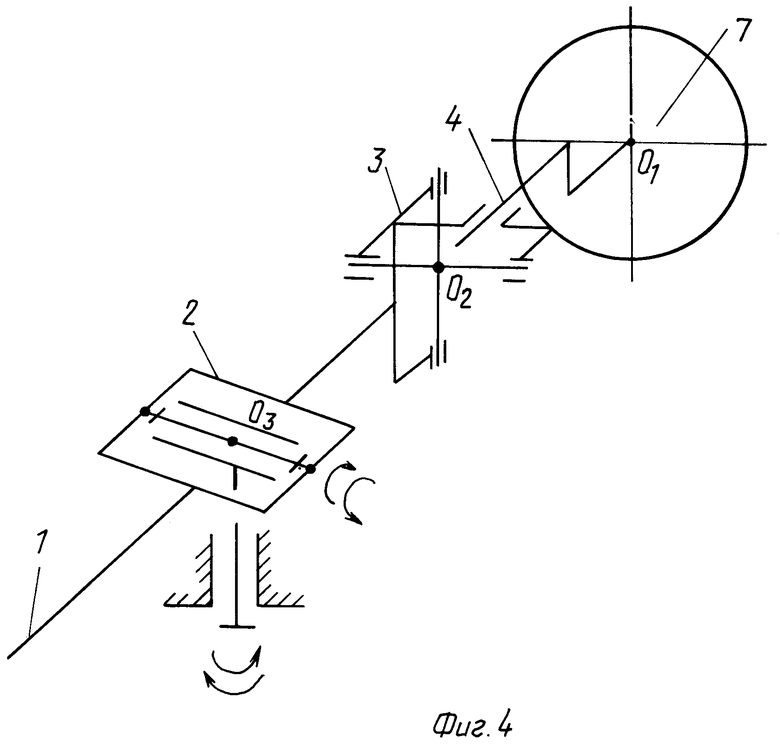
Рассмотрим подробнее работу механизма вращения крыла, который в общем представляет собой схему работы весла. Итак, на фиг.4 имеем: 7 - колесо конической передачи, 4 - коленчатый вал, 3 - карданная передача, 2 - опора вращения крыла, 1 - база крыла.
Колесо 7 передает вращение через коленвал 4 на карданную передачу 3, вторая половина которой жестко соединена с опорой вращения крыла 2, на которой находится консоль - база крыла 1. Так как опора вращения (уключина) имеет возможность вращаться в 2-х взаимно перпендикулярных плоскостях, то она передает вращение базе крыла 1 по конической траектории как образующей поверхности конуса, которая в свою очередь находится в горизонтальной положении. Сама же опора вращения крыла 2 является вершиной конуса.
Для чего необходимо горизонтальное положение базы крыла.
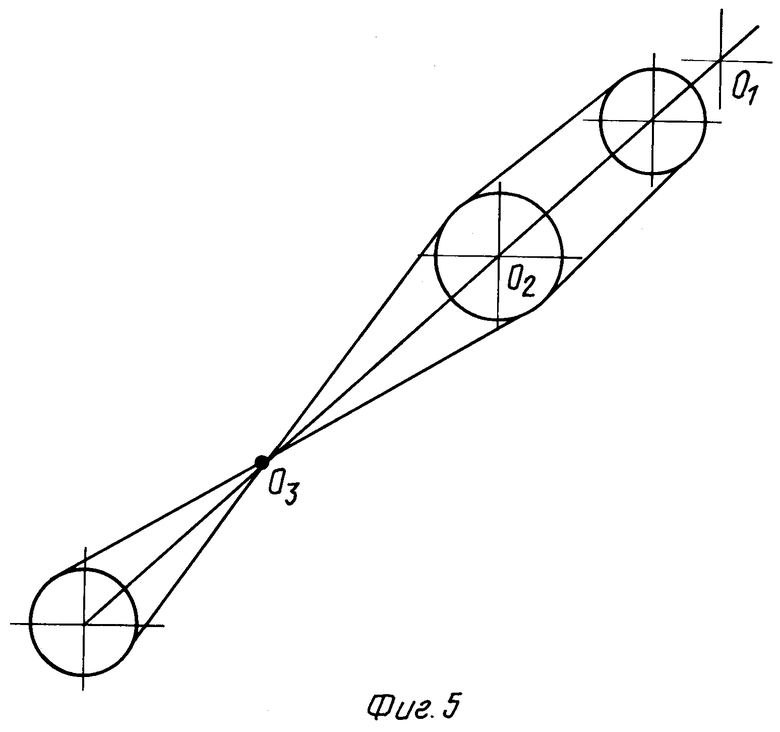
Оно нужно для формирования правильного движения крыла по замкнутой круговой траектории, для получения подъемной силы, т.е. для получения положительного эффекта.
Для наглядности показаны траектории движения звеньев механизма вращения крыла на фиг.5.
Крыло, схема крепления к базе
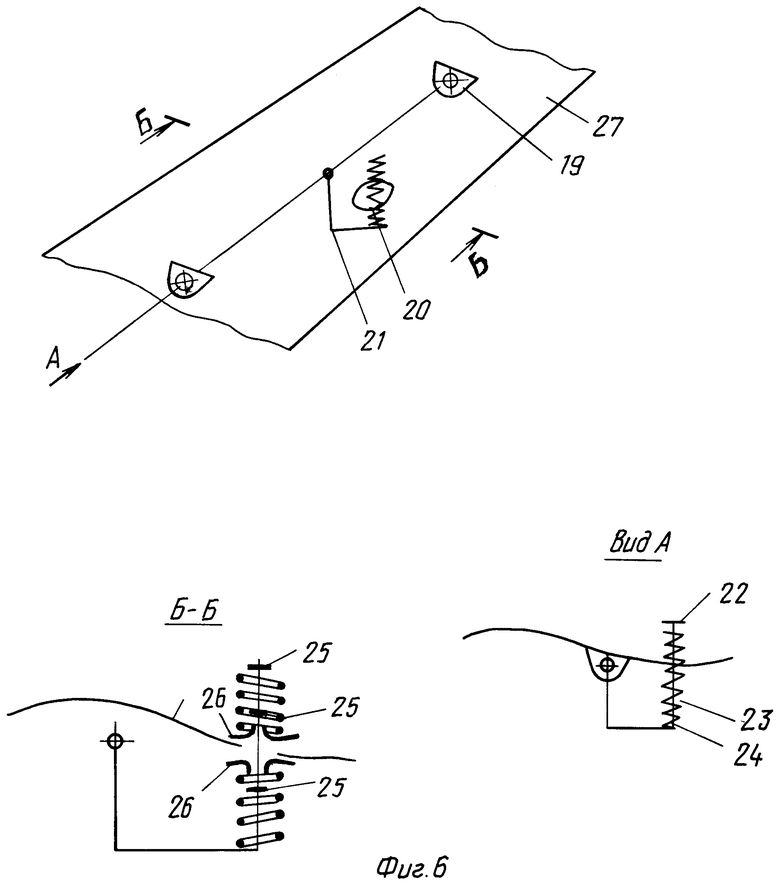
Способ крепления крыла к базе можно показать так: фиг.6.
На главном виде фиг.6 имеем: 1 - база крыла, 27 - само крыло. Здесь видно, что крыло крепится к базе в 3-х точках. В 2-х точках с помощью петель 19 и в одной точке с помощью пружин 20, упирающихся в консоль 21 базы крыла. При этом нужно сказать, что консоль и пружины играют роль мягкой качалки, т. к. само крыло в процессе своей работы будет самоустанавливающимся. Это условие играет основную роль в получении положительного эффекта работы данной конструкции.
Далее на виде А имеем шток 22 и две пружины: верхняя 23, нижняя 24. На виде сечения Б-Б имеем на штоке три пружинных упора 25 и две тарельчатых шайбы 26, т. к. качание крыла должно иметь определенные пределы в рамках устойчивой работы конструкции.
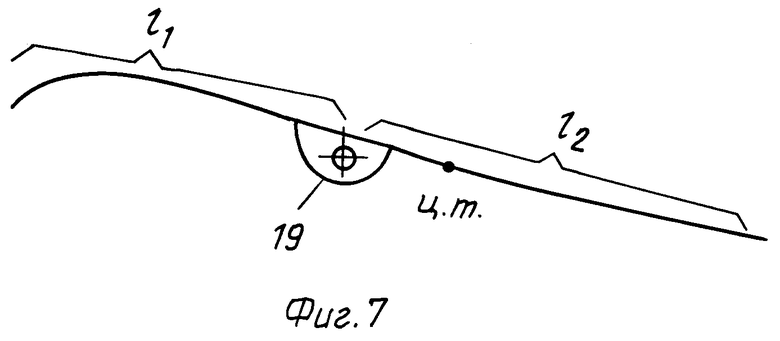
При этом нужно еще добавить одну очень существенную деталь: распределение площадей и центра тяжести крыла на самом крыле относительно отверстия петли 19, места крепления крыла на базе. Из чертежа (фиг.7) следует, что l2>l1, а центр тяжести расположен на стороне размера l2 справа от оси отверстия петли 19.
Траектория периферии крыла при скорости V=0
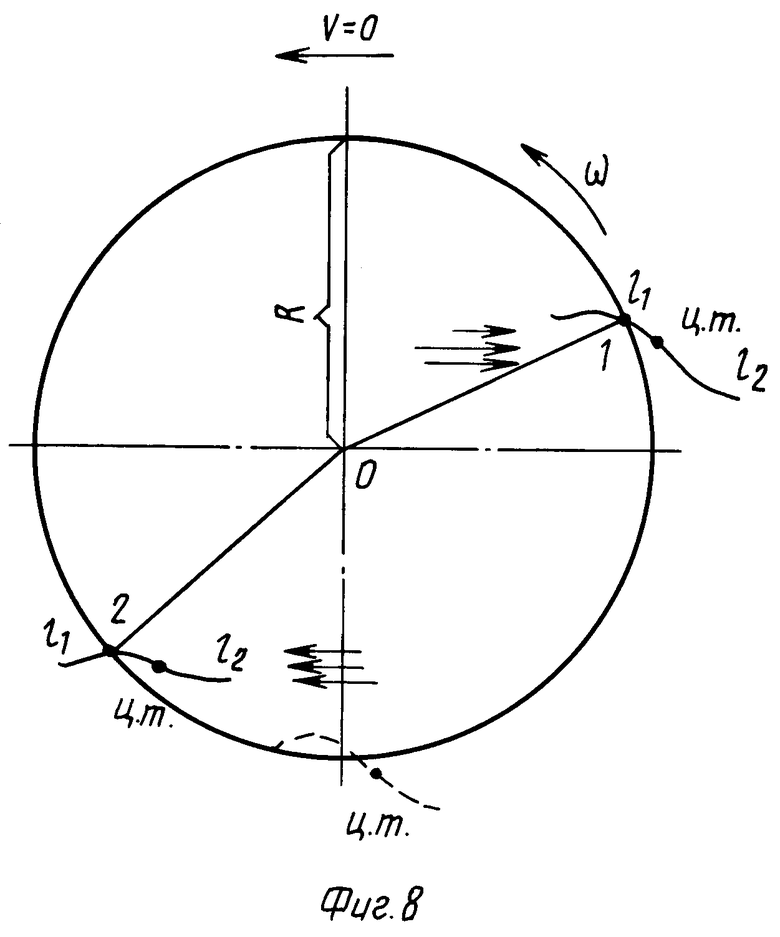
Рассмотрим движение периферии крыла по круговой траектории, фиг.8.
Этот чертеж показывает на работу периферии крыла на круговой траектории. Сочетание воздействия на части крыла встречных воздушных потоков и центростремительных сил заставляет принимать его определенное положение.
Приблизительно где-то в точках 1 и 2 происходит переключение этих положений.
Например, в точке 1 часть крылан l2 под действием центростремительных сил уходит наверх до упора на оси демпфера;
в точке 2 - наоборот часть крыла l2 под действием тех же сил уходит вниз до нижнего упора.
Опять же напомним, что l2>l1 и что точка 1 соответствует выбранному углу атаки крыла, при котором Cx - mах, а точка 2 соответствует выбранному углу атаки, при котором Cx - mах фиг.8.
Итак, в одном цикле или обороте крыла имеем Cx и Cy, значит имеем подъемную силу и, следовательно, положительный эффект.
Он формируется правильно выбранным положением крыла, при котором не создается помех при движении крыла по кругу (циклу) и при поступательном движении (в полете). Полученный положительный импульс в виде Cx и Cy за один оборот представляет собой положительную работу данной схемы.
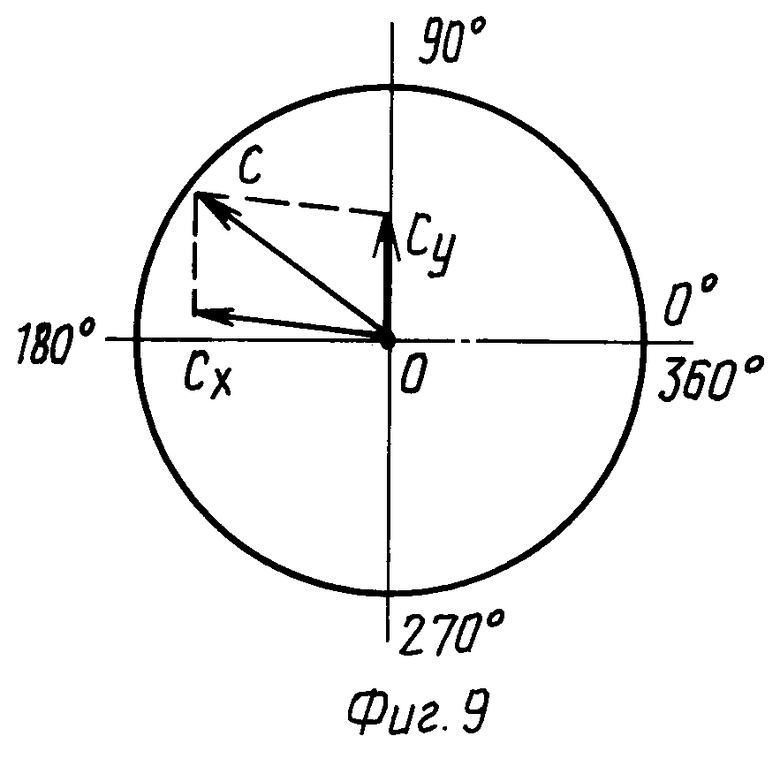
На фиг. 9 показана графическая картина результирующих подъемных сил в процессе вращения крыла по круговой траектории, где Сy создается в основном в интервале от 60 до 230o, а Cx - в интервале от 180o до 320. На самом деле картина немного сложнее, но вобщем она приблизительно такая и дает право полагать, что результирующая подъемная сила соответствует своему графическому изображению.
Сущность изобретения
Строго говоря, процесс, который здесь рассмотрели, относится к волновым.
Волной является само крыло, которое циклически меняет угол наклона (атаки), при этом рабочими поверхностями создается подъемная сила: Сy - создается внутренней частью крыла, Сx - наружной. То есть обе поверхности крыла рабочие.
Суммируя, заключаем, что движение крыльев здесь является волновым и циклическим (нелинейным) процессом.
Махолет. Распределение равнодействующих сил по крыльям
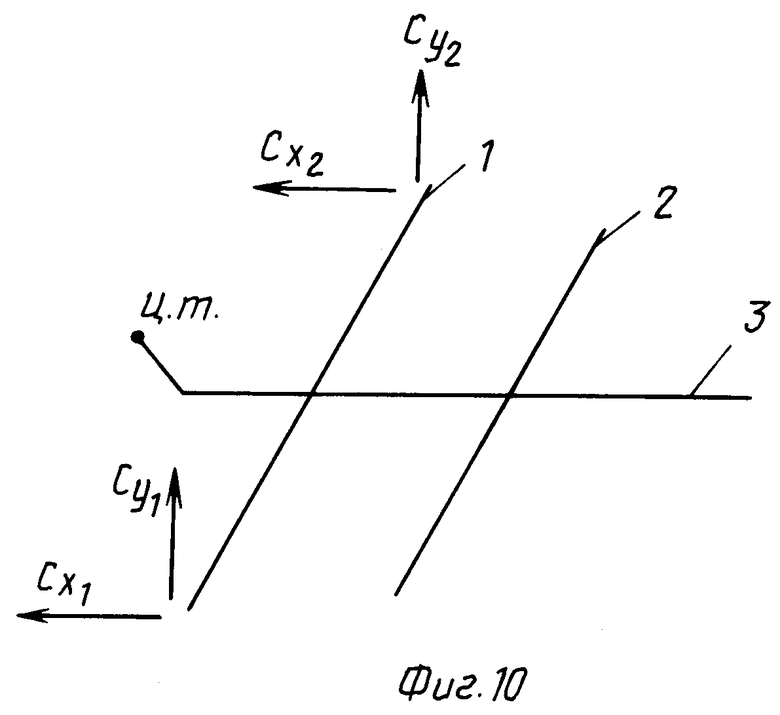
Другим важным вопросом данной конструкции является вопрос о положении центра тяжести. Если привести все силы, действующие на крылья, к равнодействующим силам, то получим на фиг.10 следующую картину сил.
Причем эти силы по времени действуют одна за другой. Сначала Cy1, потом Cx1, затем через 180 Cy2, потом Cx2.
Причем нужно напомнить, что площадь крыла 1 больше площади крыла 2:
S1>S2.
В результате этого при движении крыльев во время взмаха будет постоянно меняющийся крен, а при отталкивании - постоянно меняющийся разворот.
Все это происходит как постоянный колебательный процесс в поперечном и продольном направлениях во взаимно перпендикулярных плоскостях (относительно оси симметрии 3, фиг.10).
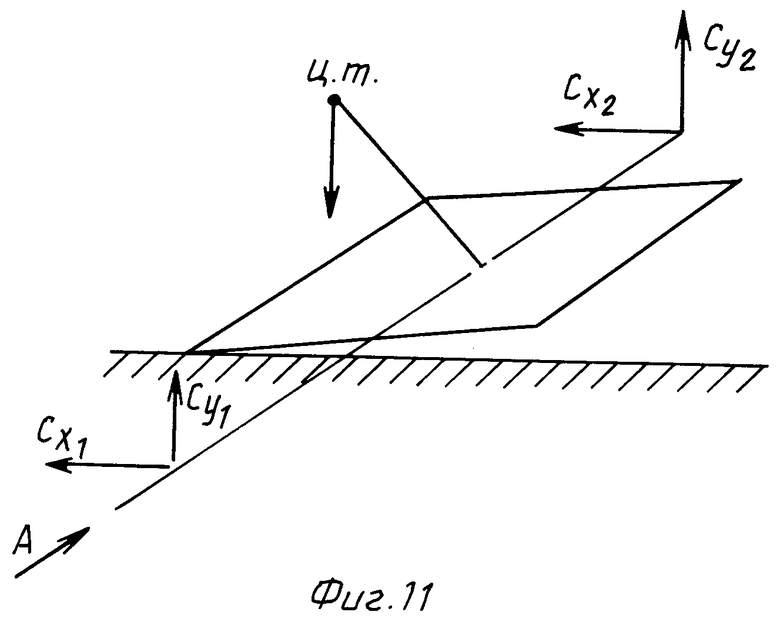
Махолет. Механический аналог (модель)
Абстрагируясь от реальной конструкции фиг.10 к модели, получим следующую схему с той же последовательностью действия сил, черт. 9 фиг.11.
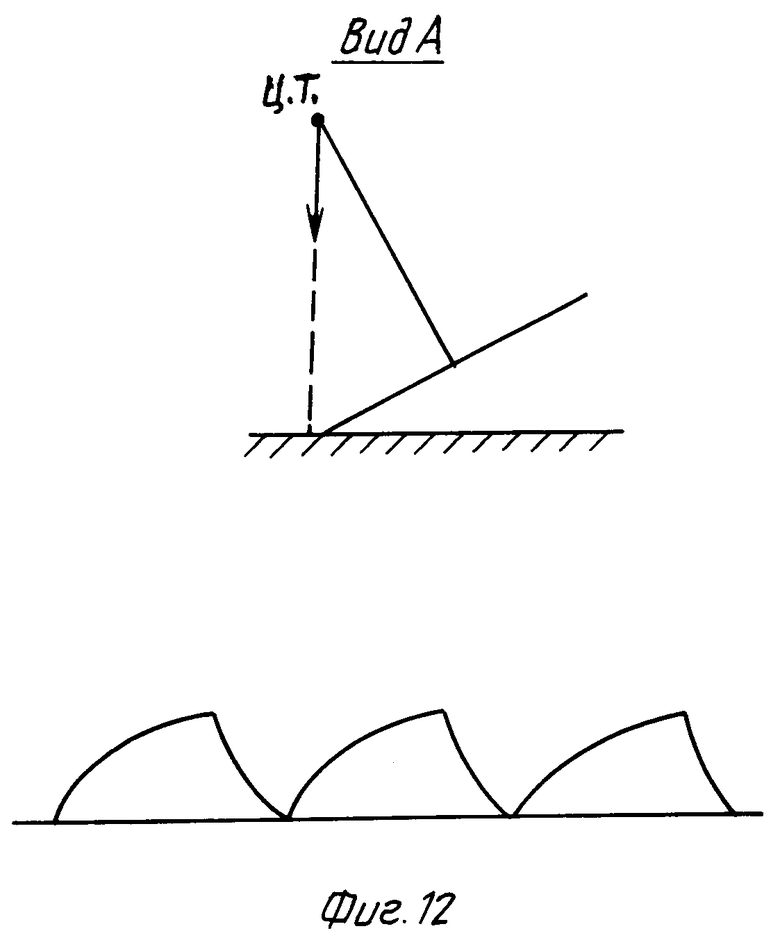
В итоге получается, что центр тяжести вид А движется по пространственной циклоиде фиг.12. А у реальной конструкции эта пространственная циклоида сильно вытянута вдоль оси, т.к. накладывается поступательное движение, которое мы отбросили.
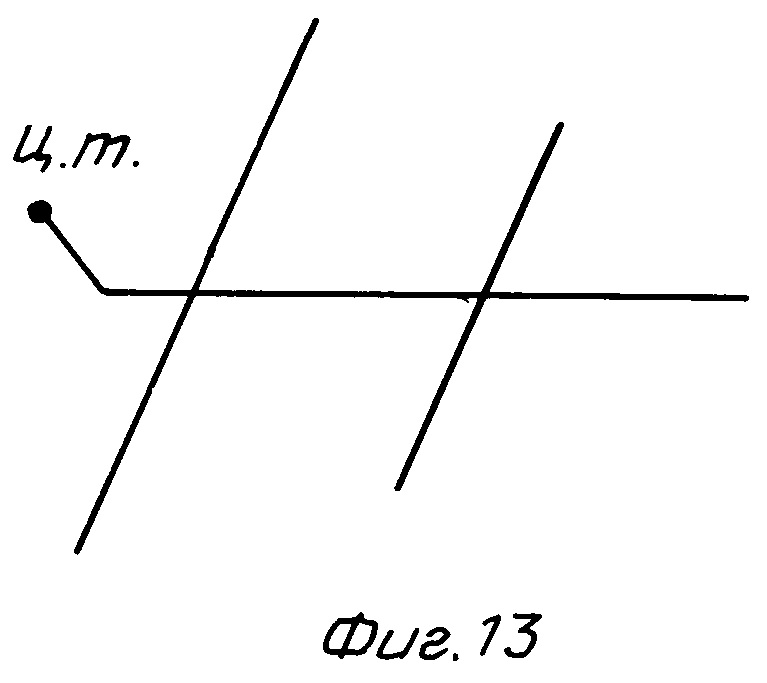
Следовательно, ц.т. реальной конструкции участвует в 2-х движениях:
а) прямолинейном, в) циклоидном и располагается следующим образом на фиг.13.
Для чего нужен такой вид движения
Он нужен для устойчивости, для компенсации дисбаланса сил при работе крыльев, т.к. картина распределения этих сил не совсем симметрична.
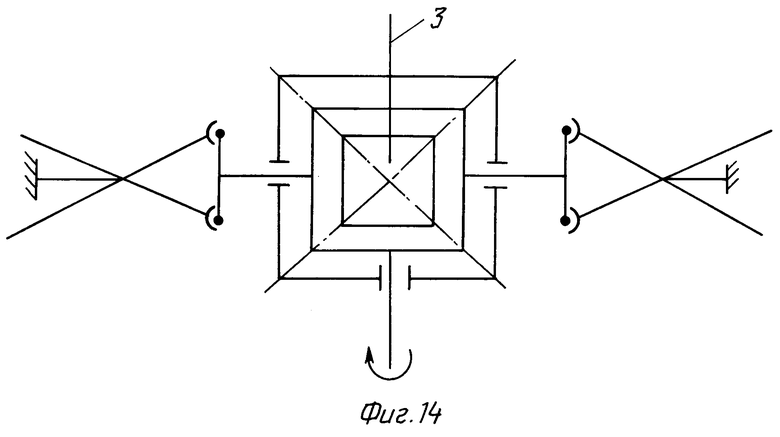
Махолет, симметричность конструкции
Другой очень важный вопрос о динамической уравновешенности конструкции. Очевидно, что рабочие обороты должны быть довольно большими, поэтому вопрос этот не лишний. Ответить на этот вопрос можно довольно легко, если применить правило продольной или осевой симметрии.
На фиг.1 сдвигаем и совмещаем две конические передачи и крылья вдоль оси 3. Получаем картину фиг. 14.
Получаем совершенно симметричную картину, которая доказывает сбалансированность самой конструкции, ее равновесие.
Блок управления полетом
Блок 6 управления осуществляет все необходимые движения, эволюции в рамках эксплуатационной необходимости и возможности данной конструкции (фиг.1). Требования к управлению летательным аппаратом весьма жесткие, поэтому от простоты и удобства управления ЛА зависит сама его жизнеспособность.
Рассмотрим каждый вид движения и обоснуем способы его исполнения.
а) Взлет и посадка по вертикали.
в) Взлет и посадка по глиссаде.
c) Полет по прямой.
d) Полет вправо, влево.
e) Полет по восходящей, нисходящей линии.
а) Взлет и посадка по вертикали
1. Взлет и посадка по вертикали возможны при отсутствии горизонтальной составляющей подъемной силы или ее незначительной величине.
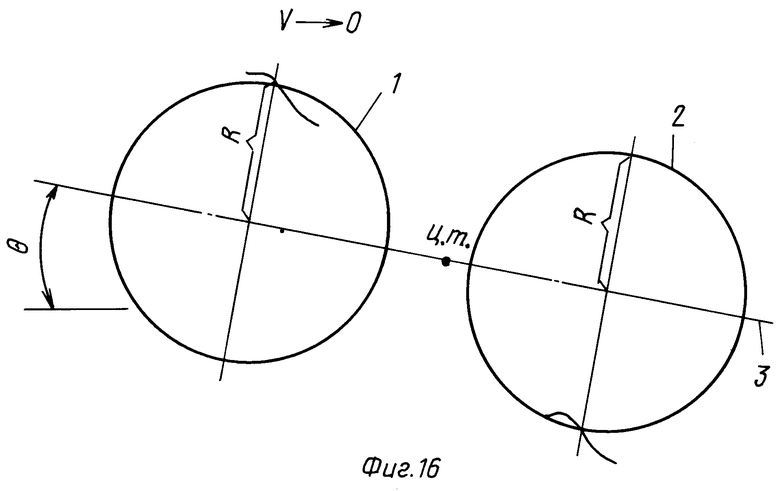
Тогда, как Сy - max. Как достигнуть такого сочетания параметров. На фиг. 8 рассматривалась траектория движения крыла по кругу, когда (скорость ЛА)±0. Искомое сочетание параметров подъемной силы, когда Сx=0, Сy=mах, показано на фиг.16.
Основным здесь является сдвиг центра тяжести (ц.т.) по сравнению с черт. 10 фиг. 13 внутрь между центрами вращения крыльев по оси симметрии 3 (ближе ко второму крылу) фиг.17.
Этот сдвиг определяет появление θ угла подъема оси симметрии 3 фиг.4 (опрокидывания), в результате чего равнодействующая система сил приводит к искомому результату V=0, Сx=0, Сy=max.
Траектории движения крыльев (фиг.4, 1 и 2) круговые, т.к. поступательное движение и скорость ЛА равны нулю.
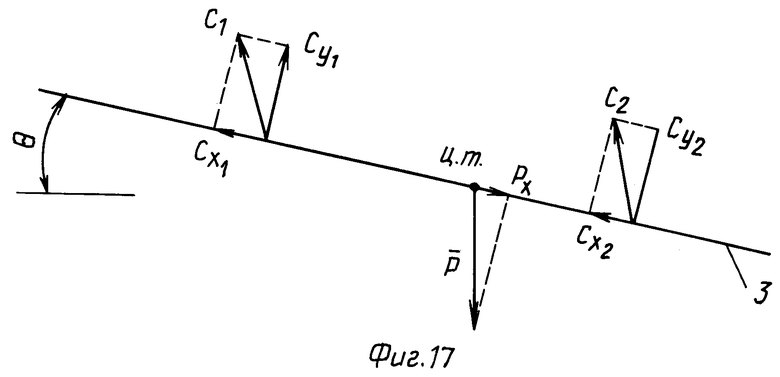
На фиг.17 показана равнодействующая система сил при вертикальном взлете и посадке, из которой видно, что наличие угла опрокидывания удовлетворяет нашему условию С=0.
Действительно, Сx1+Сx2-Рx= 0, где Рx - составляющая веса конструкции, действующая по оси симметрии 3, так же как Сx1 и Сx2, только в другую сторону.
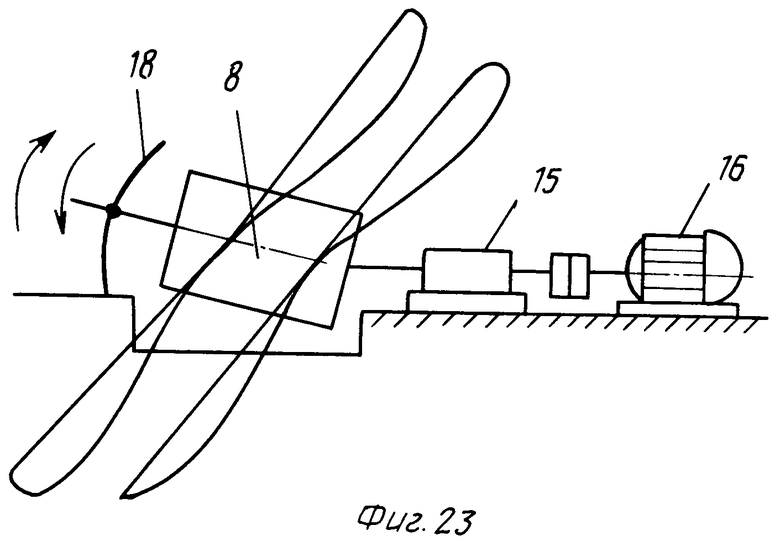
2. Тот же самый результат можно получить, не меняя положения центра тяжести. Нужно создать угол подъема оси симметрии (угол опрокидывания) за счет подъема корпуса 8 по сектору 18 наверх фиг.23. В результате получим ту же силовую картину Сy=mах Сx=min.
в) Взлет и посадка по глиссаде
1. Взлет и посадка на глиссаде возможны при наличии Сx и Сy, а так же достаточной амплитуды и частоты вращения крыльев.
Исходная схема Махолета на фиг.1 позволяет конструкции совершать взлет и посадку по глиссаде, т.к. вышеназванные факторы там присутствуют.
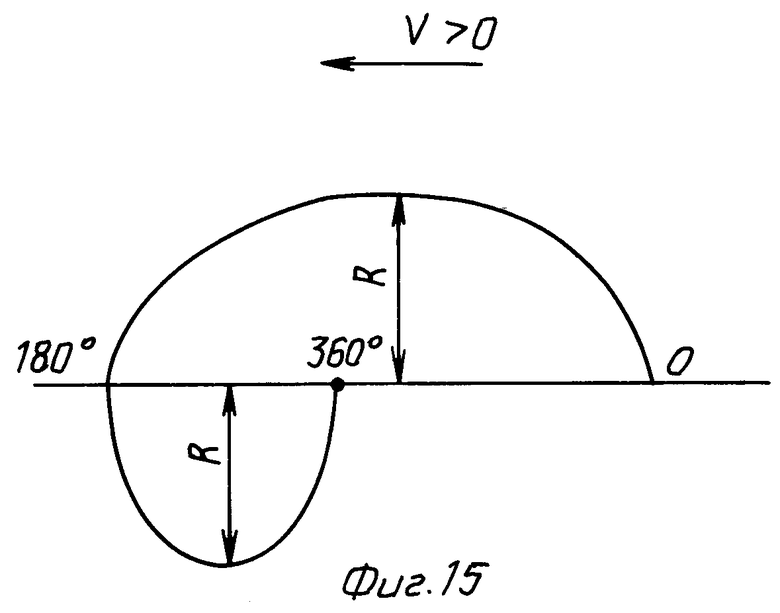
Нужно подчеркнуть, что в случае, когда скорость ЛА V>0, траектория движения крыла меняется. Как это происходит, показано на фиг.15. Траектории движения крыльев происходят по эллиптическим кривым: вперед по растянутой, назад по сжатой.
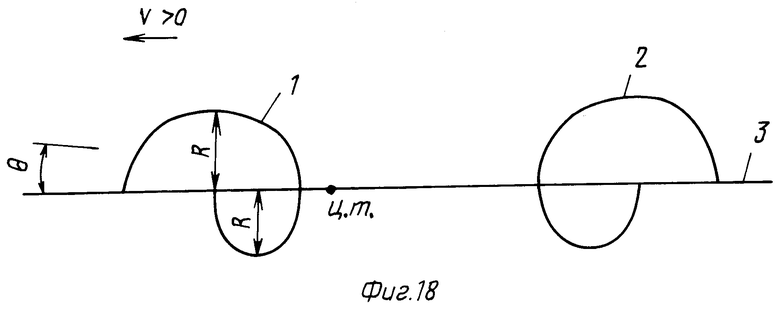
Траектории движения периферии крыльев, положение центра тяжести см. на фиг. 18, где 1, 2 - это траектории движения периферии крыльев, θ - угол наклона оси симметрии вперед против часовой стрелки.
Здесь видно, что центр тяжести сдвинут вперед в направлении к 1-му крылу. Именно поэтому имеется угол наклона.
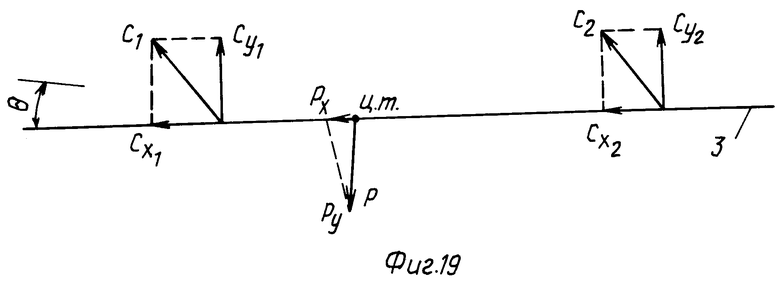
Наличие глиссады предполагает значительную величину Сx, что и подтверждается схемой равнодействующих сил фиг.19, где Сx=Сx1+Сx2+Рx, причем Рx - составляющая веса конструкции действует в одном направлении с Сx1 и Сx2 по оси симметрии 3. Таким образом, выбранная схема подходит для движения ЛА по глиссаде, что подтверждается теоретически.
2. Тот же результат можно получить, не меняя положения центра тяжести черт. 10, т.е. не при помощи центра тяжести. Нужно создать угол наклона оси симметрии, фиг. 18, при помощи опускания корпуса 8 по сектору 18 вниз, фиг. 23. В результате получим ту же силовую картину.
с) Полет по прямой
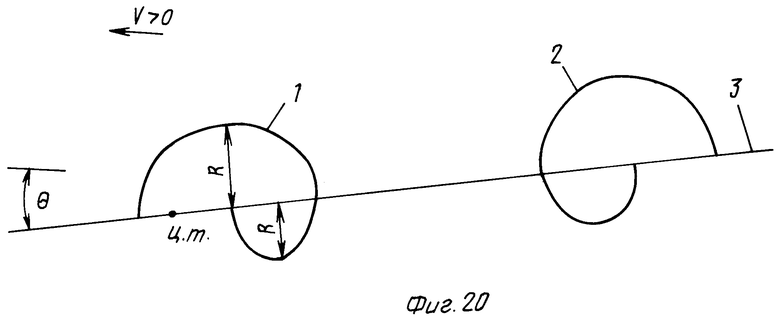
1. Полет по прямой связан с необходимостью регулировать соотношение между Сx и Сy, т.к. достаточный для поддержания полета Сy создается за счет угла атаки крыла. Следовательно, свой С, создаваемый махом крыла, надо уменьшить. Как это сделать, показано на фиг.20, где 1, 2 - траектории периферии крыльев, θ - угол наклона оси симметрии 3 против часовой стрелки, а центр тяжести вынесен за первое крыло наружу.
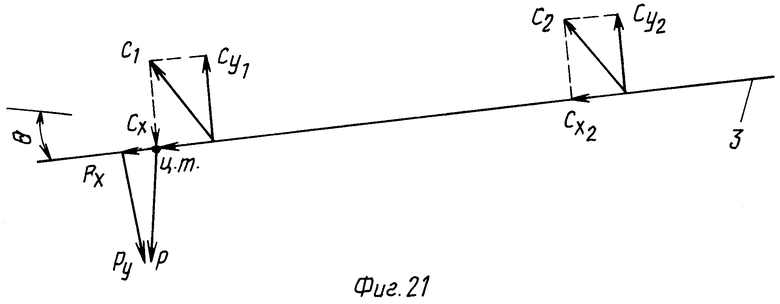
Здесь угол наклона больше, чем в предыдущем случае, но и скорость прямого полета больше, чем у глиссады. Однако все это сделано в пределах поддержания угла атаки крыла положительным, но минимальным. После этих мер результирующая система сил, фиг.21, значительно меняется в сторону возрастания Сx и уменьшения Сy и это следует из формулы
Сx= Сx1+Сx2+Рx, где Рx - составляющая веса конструкции, действующая в одном направлении с Сx1 и Сx2. Величина Рx в данном случае больше, чем у глиссады, т. к. больше угол наклона оси симметрии 3 по отношению к вектору скорости.
Следует напомнить, что вынос центра тяжести вперед так же влияет на возрастание величины Сx согласно предыдущих рассуждении на эту тему по фиг. 11.
2. Тот же результат можно получить, не меняя положения центра тяжести, т.е. не при помощи центра тяжести. Нужно создать угол наклона оси симметрии, черт. 15, при помощи опускания корпуса 8 по сектору 18 вниз, фиг.23. В результате получим ту же силовую картину. Таким образом, существует как минимум два способа решения вопроса управления полетом.
d) Полет вправо, влево
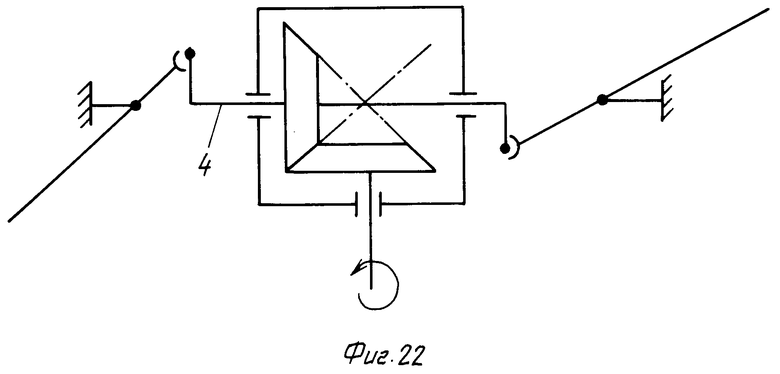
Полет вправо, влево осуществляется сдвигом на первой паре крыльев коленчатого вала 4, фиг.1, влево или вправо.
Что мы этим достигаем. Слева имеем амплитуду и угол конуса больше, чем справа. Отсюда естественно и поворот направо и наоборот, фиг.22.
И вообще, сдвигая коленчатый вал в сторону, мы или увеличиваем, или уменьшаем амплитуду вращения крыльев.
Это, естественно, требует соответственной проработки конструкции коленчатого вала.
е) Полет по восходящей, нисходящей линиям
Для чего нужен такой полет. Он нужен для быстрого набора высоты или снижения, или воздушной акробатики. Каким образом это может происходить, показано на фиг.23.
Корпус 8 (фиг.23) имеет возможность подниматься и опускаться по сектору 18 и конической передаче 10 фиг.1 вверх, вниз. Естественно такие движения будут сопровождаться или быстрым набором высоты, или снижением.
Отбор мощности на все виды управления будет происходить от двигателя коробки передач (16, 15 фиг. 1) фиг.23 через блок управления и на исполнительные механизмы, влияющие на положение конструкции в полете. Доработки, связанные с управлением полета, несложные и составляют не более 25% трудоемкости основной схемы, что в общем особенно не удорожает и слишком не усложняет окончательной задачи.
Из сведений, подтверждающих существенность изобретения, могу сослаться на живые организмы, существующие в природе, которые используют маховый полет. Почему он не освоен человеческой практикой? По-видимому она применяла для его освоения слишком элементарные усилия, не вдаваясь в глубину и суть данной проблемы. Ведь в природе на первый взгляд все так просто: взял и сделал.
Но не все очевидное просто. Эта работа возможно подтвердит это.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| МАХОЛЕТ | 1995 |
|
RU2081033C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| Динамический инерционный махолет (ДИМа) | 2021 |
|
RU2779547C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| САМОЛЕТ С КОЛЕБЛЮЩИМИСЯ ПРЕДКРЫЛКАМИ | 2010 |
|
RU2457154C2 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА НА АЭРОФИНИШЕР | 2009 |
|
RU2399560C1 |
| СПОСОБ ПЛАНИРУЮЩЕГО ПОЛЕТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2008 |
|
RU2397109C2 |
| МАХОЛЕТ | 1996 |
|
RU2129076C1 |
| МАХОЛЕТ | 2009 |
|
RU2412083C2 |
Изобретение относится к летательным аппаратам тяжелее воздуха. Махолет содержит корпус, переднее и заднее крылья, опоры для вращения крыльев, хвостовую часть, двигатель и коробку передач. Предусмотрены карданные передачи, которые вместе с опорами вращения крыльев создают постоянное горизонтальное положение базы крыла при его вращении. Переднее и заднее крылья выполнены разными по площади и вращаются в одну сторону, вперед со сдвигом по фазе на 180o по образующей конической поверхности с вершиной посередине, с циклической саморегуляцией углового положения каждого крыла в процессе вращения, с колебательным продольным и поперечным процессом. Изобретение направлено на повышение устойчивости полета. 23 ил.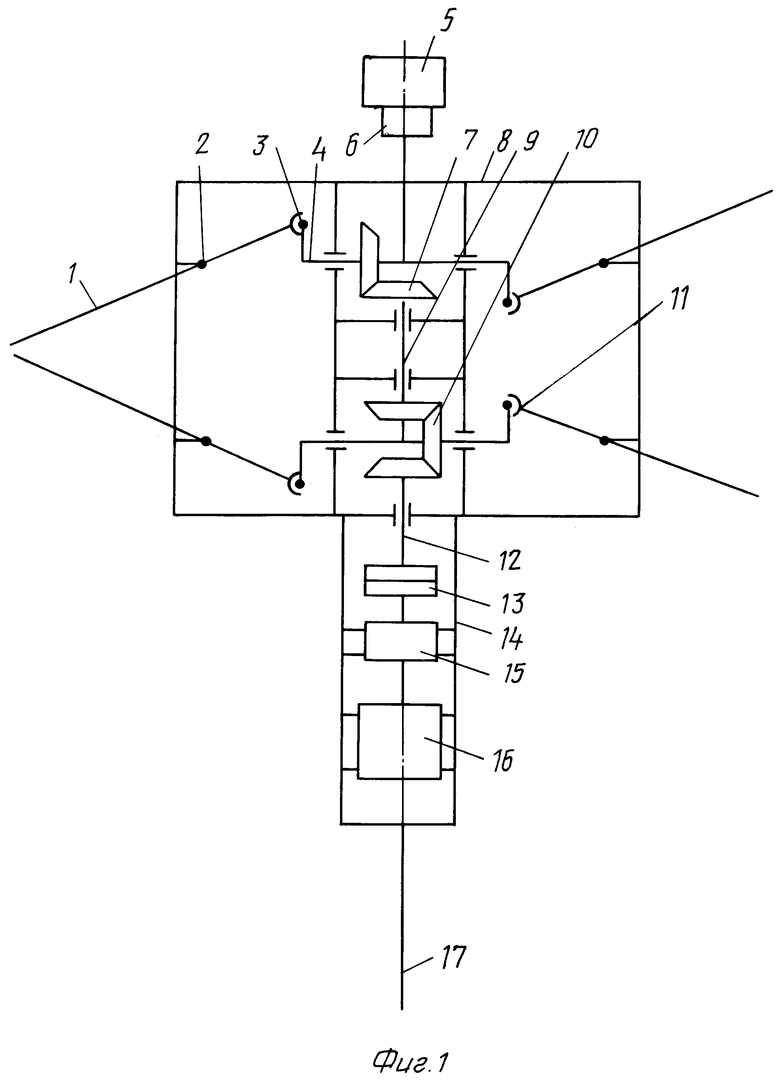
Махолет, содержащий корпус, переднее и заднее крылья, опоры для вращения крыльев, хвостовую часть, двигатель и коробку передач, отличающийся тем, что имеет карданные передачи, которые вместе с опорами вращения крыльев создают постоянное горизонтальное положение базы крыла при его вращении, переднее и заднее крылья выполнены разными по площади, вращаются в одну сторону, вперед со сдвигом по фазе на 180° по образующей конической поверхности с вершиной посередине, с циклической саморегуляцией углового положения каждого крыла в процессе вращения, с колебательным продольным и поперечным процессами.
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПРЯМОГО ДЕЙСТВИЯ | 1991 |
|
RU2021627C1 |
| Траверса для подъема объемных изделий | 1977 |
|
SU631429A1 |
| СПОСОБ ВЫПЛАВКИ ВАНАДИЙСОДЕРЖАЩИХ СТАЛЕЙ И СПЛАВОВ | 1999 |
|
RU2144089C1 |
| US 4712749 A, 11.10.1985 | |||
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ МАШУЩЕГО ПОЛЕТА И ПОЛЕТА ПО-САМОЛЕТНОМУ | 1991 |
|
RU2038266C1 |
| МАХОЛЕТ | 1993 |
|
RU2063367C1 |

