Изобретение касается управления пространственным положением позиционирующей головки робота и коррекции этого положения. Ниже термин "робот" охватывает также станки, например, с числовым программным управлением, так как в некоторых областях применения данный робот работает как станок с числовым программным управлением.
Обзор известных технических решений
Согласно описанию SЕ 8502327-3 (452279) известен робот с позиционирующей головкой, имеющий по меньшей мере три установочных механизма, которые могут удлиняться или укорачиваться в продольном направлении. Каждый установочный механизм прикреплен к неподвижной раме посредством первого шарнира так, что он может поворачиваться во всех направлениях относительно рамы. Также каждый установочный механизм закреплен на одном конце в подвижной позиционирующей головке посредством второго шарнира. Жесткий манипулятор присоединен к позиционирующей головке между установочными механизмами. Манипулятор удерживается в радиальном направлении универсальным шарниром, но может перемещаться вдоль своей оси относительно этого шарнира, жестко соединенного с рамой.
Известен также похожий робот, в котором установочные механизмы закреплены в подвижном ползуне посредством первого шарнира, а ползун закреплен в неподвижной раме так, что каждый установочный механизм может поворачиваться во всех направлениях относительно рамы. Шарнир, таким образом, закреплен в раме через промежуточное средство.
Управление этими известными роботами осуществляется установочными механизмами, снабженными двигателями для их удлинения или укорочения. Управление производится путем линейной регулировки установочных механизмов для достижения позиционирующей головкой заранее заданного положения или же для ее перемещения по заранее заданной траектории. Таким образом, нет никакого контроля заданного положения позиционирующей головки, а это означает, что влияние сил и температуры на установочные механизмы, шарниры, позиционирующую головку и т.д. будет приводить к появлению разности между заданной позицией и фактическим положением позиционирующей головки.
Эта разность между заданной позицией и фактическим положением является недостатком, поскольку ведет к снижению точности робота.
Цель изобретения
Целью настоящего изобретения является повышение точности робота описанного выше типа.
Сущность изобретения
Цель достигается установкой системы регулирования с обратной связью дополнительно к существующей системе управления. Изобретение характеризуется, во-первых, тем, что существующая система управления и система регулирования с обратной связью указывают координаты позиционирующей головки в различных системах координат. Во-вторых, датчики системы регулирования с обратной связью размещены для измерения на подвижной части робота, которая сопровождает его перемещение, но свободна от напряжений. Поэтому эта часть не подвержена влиянию температуры или сил.
Таким образом, изобретение касается системы управления роботом, содержащим по меньшей мере три установочных механизма, которые могут удлиняться или укорачиваться в продольном направлении, причем каждый установочный механизм непосредственно или через промежуточное средство закреплен в неподвижной раме с помощью первого шарнира так, что каждый установочный механизм может поворачиваться во всех направлениях относительно рамы, при этом каждый установочный механизм закреплен одним концом в подвижной позиционирующей головке посредством второго шарнира, жесткий манипулятор, который присоединен к позиционирующей головке и проходит от нее между установочными механизмами, причем манипулятор удерживается в радиальном направлении в универсальном шарнире с возможностью перемещения вдоль своей оси относительно этого универсального шарнира, связанного с рамой и жестко соединенного с ней, содержащая датчики длины каждого установочного механизма, являющиеся частью системы управления положением позиционирующей головки в рабочей зоне робота. Система управления роботом согласно изобретению снабжена системой регулирования с обратной связью, предназначенной для коррекции положения позиционирующей головки в рабочей зоне, а система управления положением выполнена с возможностью взаимодействия с системой регулирования, причем система управления положением и система регулирования с обратной связью выполнены с возможностью функционирования с использованием различных систем координат.
Система управления положением может быть выполнена с возможностью функционирования с использованием декартовой системы координат, а система регулирования с обратной связью - с возможностью функционирования с использованием сферической системы координат.
Система может быть снабжена двумя угловыми датчиками и датчиком длины, соединенными с универсальным шарниром для измерения фактического положения позиционирующей головки в сферической системе координат и для взаимодействия с системой управления положением для определения разности между пространственными координатами заданной позиции и пространственными координатами фактического положения позиционирующей головки для возможной коррекции положения позиционирующей головки в рабочей зоне робота.
Угловые датчики и датчик длины могут быть установлены для измерений на такой части робота или около нее, которая является подвижной и следует за перемещениями робота, но свободна от напряжений.
Угловые датчики системы регулирования с обратной связью могут быть размещены на универсальном шарнире, а датчик длины - на манипуляторе.
Система может быть снабжена по меньшей мере двумя дополнительными угловыми датчиками, расположенными на держателе инструмента, установленном в позиционирующей головке и соединенном с системой управления.
Изобретение также касается способа управления положением позиционирующей головки робота, включающего изменение положения позиционирующей головки в соответствии с заданной позицией. Согласно этому способу управляют положением позиционирующей головки с помощью системы управления, функционирующей с использованием декартовой системы координат, системой регулирования с обратной связью определяют положение позиционирующей головки в сферической системе координат, выполняют преобразование координат положения позиционирующей головки из сферической системы координат в декартову систему координат, после каждого перемещения позиционирующей головки в заданную позицию определяют разность ΔХ, ΔY, ΔZ по трем осям между заданной позицией X, Y, Z и фактическим положением позиционирующей головки в декартовой системе координат, формируют новую заданную позицию Хn, Yn, Zn позиционирующей головки по следующим математическим зависимостям
Хn=Х+ΔХ,
Yn=У+ΔY,
Zn=Z+ΔZ,
изменяют положение позиционирующей головки в соответствии с новой заданной позицией.
В способе может быть использована система управления роботом, описанная выше.
Краткое описание чертежей
Ниже изобретение будет описано более подробно на примерах его осуществления со ссылкой на приложенные чертежи.
На фиг.1 показан вид спереди робота в соответствии с изобретением.
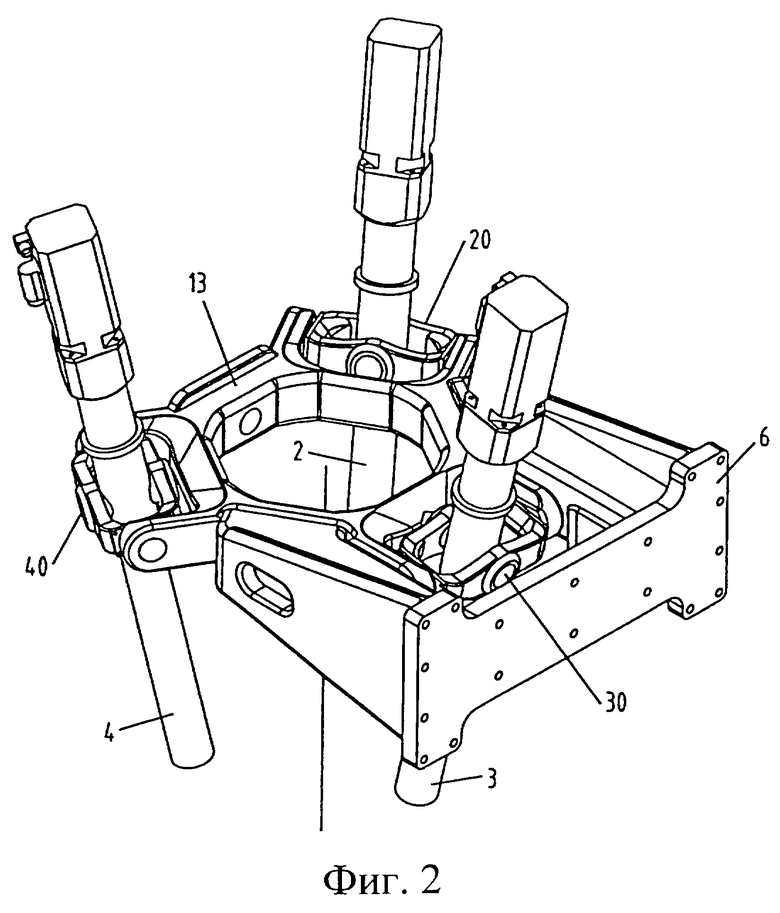
На фиг.2 в перспективе показан вид неподвижного держателя универсального шарнира в соответствии с изобретением.
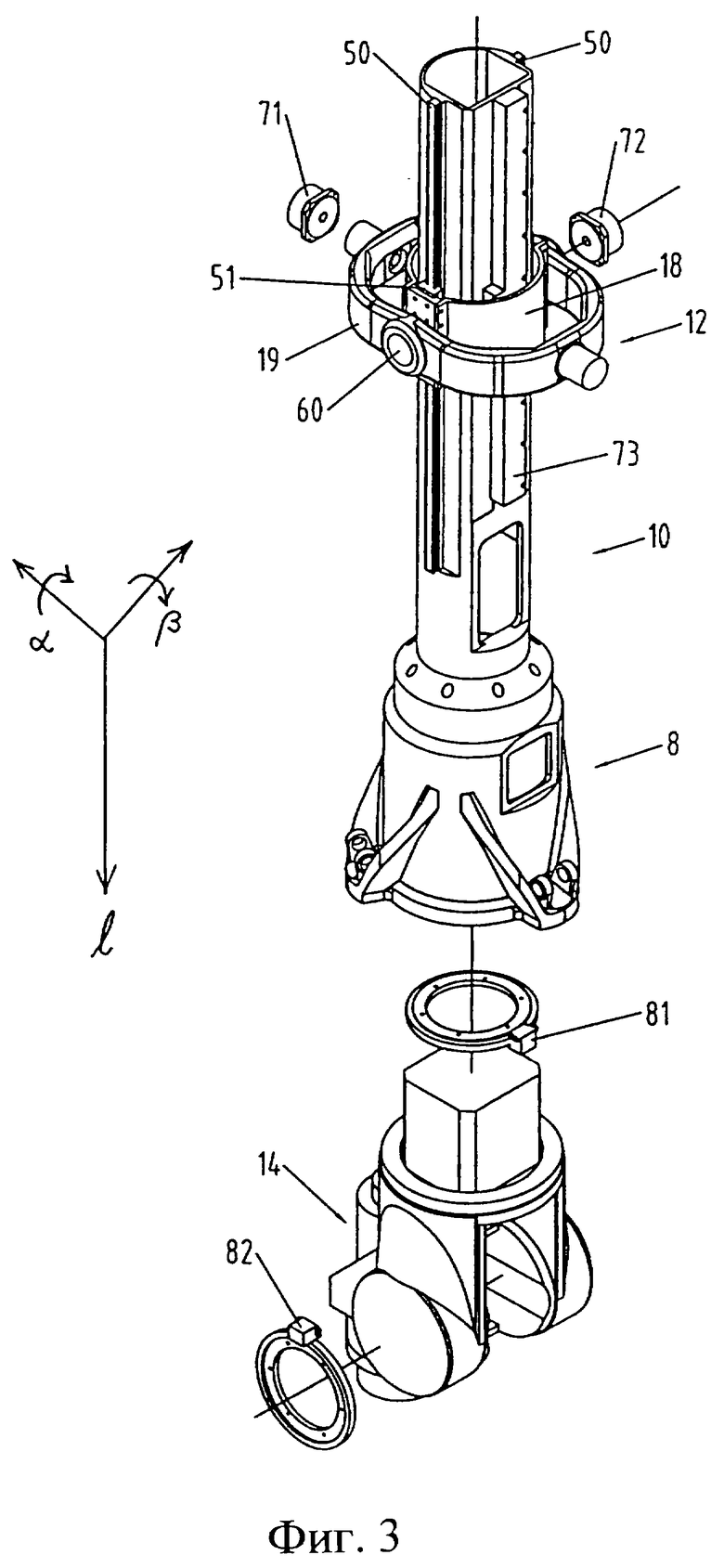
На фиг. 3 в перспективе показан вид центрального манипулятора, установленного в универсальном шарнире, где в соответствии с изобретением шарнир снабжен датчиками, работающими в отдельной системе координат.
Подробное описание изобретения
Изобретение непосредственно связано с роботом 1, имеющим по меньшей мере три установочных механизма 2, 3, 4, которые могут удлиняться или укорачиваться в продольном направлении. Каждый установочный механизм закреплен в неподвижной раме 6 посредством первого шарнира 20, 30, 40 так, что каждый установочный механизм 2, 3, 4 может поворачиваться во всех направлениях относительно рамы 6. Каждый установочный механизм также присоединен на одном конце посредством второго шарнира 21, 31, 41 к подвижной позиционирующей головке 8. Промежуточный манипулятор 10 также закреплен между установочными механизмами 2, 3, 4 и выходит из позиционирующей головки 8. На фиг.1 установочный механизм 3 с его первым шарниром 30 и вторым шарниром 31 закрыт этим манипулятором 10, однако все эти детали указаны стрелками. Аналогично конструкции, приведенной в описании SЕ 8502327-3 (452279), каждый из установочных механизмов выполнен в виде поршня, перемещающегося в цилиндре.
Манипулятор 10 соединен с позиционирующей головкой 8 и проходит вверх между установочными механизмами. В радиальном направлении он удерживается универсальным шарниром 12, прикрепленным к раме 6. Универсальный шарнир 12 позволяет манипулятору скользить вдоль оси через этот шарнир, удерживая его в радиальном направлении. Универсальный шарнир 12 также допускает поворот манипулятора 10 на угол α вокруг первой оси и на угол β вокруг второй оси. Первая и вторая оси пересекаются под углом 90o.
Каждый установочный механизм 2, 3, 4 приводится в действие в соответствии с заранее заданной траекторией перемещения двигателем 22, 32, 42, предпочтительно - электрическим двигателем. Траектория перемещения служит основой для работы системы S1 управления, которая приводит в действие соответствующие двигатели 22, 32, 42 для удлинения или укорочения установочных механизмов 2, 3, 4, обеспечивая таким образом перемещение позиционирующей головки 8 к определенному месту в ее рабочей зоне или непрерывное перемещение позиционирующей головки 8 по заданной кривой в рабочей зоне. Каждый установочный механизм снабжен угловым датчиком, который определяет положение двигателя, соответствующее продольному положению установочного механизма, и таким образом фактически является датчиком длины LS1, LS2, LS3. Эти датчики образуют часть системы S1 управления положением X, Y, Z. позиционирующей головки в рабочей зоне робота. Позиционирующая головка 8 таким образом направляется к позиции X, Y, Z в декартовой системе координат, как показано системой координат на фиг.1. Как видно из фиг.1, держатель 14 инструмента соединен с позиционирующей головкой 8 соединительными средствами 16, которые определяют, будет робот иметь 4, 5 или 6 степеней подвижности. Возможно также более шести степеней подвижности.
На фиг.2 показана часть робота с манипулятором 10 и корпусом 13 универсального шарнира, из которого извлечена внутренняя часть универсального шарнира 12. Корпус 13 универсального шарнира снаружи несет на себе первые шарниры 20, 30, 40. Как видно из фиг.2, все эти первые шарниры являются шарнирами универсального типа, то есть установочные механизмы могут поворачиваться в шарнире вокруг двух перпендикулярных осей. Однако эти шарниры не позволяют установочным механизмам перемещаться в осевом направлении через шарниры. Как сказано выше, перемещение в осевом направлении достигается удлинением или укорочением установочного механизма.
На фиг.3 показан манипулятор 10 и внутренние детали универсального шарнира 12, то есть детали, установленные в корпусе 13 универсального шарнира. Эти внутренние детали включают внутреннее кольцо 18 и внешнее кольцо 19. Манипулятор 10 может скользить во внутреннем кольце 18, но при этом удерживается от поворота рельсовыми направляющими 50, которые расположены напротив друг друга на манипуляторе 10 и скользят в держателях 51, расположенных на внутреннем кольце. Снаружи внутреннее кольцо снабжено установленными с противоположных сторон осевыми штырями 60, шарнирно соединенными с внешним кольцом 19. Внешнее кольцо также снабжено осевыми штырями 70, расположенными с противоположных сторон и шарнирно устанавливаемыми в корпусе универсального шарнира 13. Все штыри расположены в одной и той же плоскости, но осевая линия штырей внутреннего кольца пересекает осевую линию штырей внешнего кольца под углом 90o.
Манипулятор 10 в универсальном шарнире 12 может поворачиваться на угол α вокруг первой оси универсального шарнира и на угол β вокруг второй оси универсального шарнира. Манипулятор может также линейно перемещаться на расстояние l, скользя во внутреннем кольце 18. Так как манипулятор присоединен к позиционирующей головке 8, то это означает, что она может занимать все положения Хn, Yn, Zn в определенной рабочей зоне, которая ограничена только конструкцией робота.
На фиг. 3 показано также, что внешнее кольцо 19 снабжено первым угловым датчиком 71, который определяет угол α поворота манипулятора вокруг первой оси универсального шарнира, см. также фиг.1. Внешнее кольцо снабжено вторым угловым датчиком 72, который определяет угол β поворота манипулятора вокруг второй оси универсального шарнира. Кроме того, датчик длины 73, предпочтительно выполненный в виде стеклянной шкалы, расположен вдоль манипулятора, чтобы определять положение манипулятора по длине l. Эти три датчика выдают координаты, соответствующие положению позиционирующей головки 8 в сферической системе координат, показанной на фиг.3. Это положение в сферической системе координат соответствует фактическому положению позиционирующей головки 8. Путем преобразования координат это фактическое положение может быть выражено в декартовой системе координат.
Преобразование координат осуществляется с помощью следующих уравнений:
Xa = lsinαcosβ;
Ya = lsinαsinβ;
Za = lcosα.
Таким образом, позиционирующей головкой 8 управляют в декартовой системе координат для ее перемещения в положение (Хb, Yb, Zb), представляющее заданную позицию. Затем положение головки определяется датчиками 71, 72, 73, которые указывают фактическое положение (α,β,l) в сферической системе координат. Выполняется преобразование координат, в результате которого получается фактическое положение (Ха, Yа, Zа) в декартовой системе координат. После этого вычисляется разность (ΔХ, ΔY, ΔZ) между заданной позицией и фактическим положением в декартовой системе координат. Наконец, эта разность добавляется к предыдущей заданной позиции (Хb, Yb, Zb), чтобы получить новую заданную позицию (Хn, Yn, Zn). Эти измерения и вычисления повторяются непрерывно для осуществления регулирования с обратной связью и благодаря компенсации силовых температурных и механических отклонений достигается повышенная точность установки позиционирующей головки.
Таким образом, разность (ΔХ, ΔY, ΔZ) между координатами заданной позиции (X, Y, Z) и координатами (Ха, Yа, Zа) фактического положения позиционирующей головки в декартовой системе координат добавляется к координатам предыдущей заданной позиции (Хb, Yb, Zb), задавая таким образом координаты новой заданной позиции Хn=Хb+ΔХ, Yn=Yb+ΔY, Zn=Zb+ΔZ. Это вычисление и коррекция затем повторяются для осуществления непрерывного управления заданной позицией.
На фиг.3 также показано, что с позиционирующей головкой 8 соединен держатель 14 инструмента, который может вращаться по меньшей мере вокруг двух осей. Поворот вокруг этих осей контролируется датчиками 81, 82, которые также могут быть включены в систему управления для коррекции заданной позиции. Если число осей вращения держателя инструмента равно двум, то робот будет иметь 5 степеней подвижности. Возможно также большее число осей вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ СХВАТА МАНИПУЛЯТОРА | 2004 |
|
RU2288092C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ | 2001 |
|
RU2206737C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОДВОДНОГО АППАРАТА В РЕЖИМЕ ЗАВИСАНИЯ | 2014 |
|
RU2547039C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2012 |
|
RU2496273C1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| СПОСОБ АТТЕСТАЦИИ СТАНКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТЕЙ ВРАЩЕНИЯ | 1990 |
|
RU2028873C1 |
| УСТРОЙСТВО УСТАНОВКИ АГРЕГАТОВ НА ИЗДЕЛИИ | 2012 |
|
RU2510606C2 |
| Способ и устройство квантования сферических координат, используемых для кодирования/декодирования данных геометрии облака точек | 2021 |
|
RU2818299C1 |
| ПРОГРАММИРУЕМЫЙ ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ И СПОСОБ ИЗМЕРЕНИЯ СДВИГА С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ | 2018 |
|
RU2711244C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
Изобретение относится к области управления пространственным положением позиционирующей головки робота и коррекции этого положения. Технический результат - повышение точности позиционирования. Робот содержит по меньшей мере три установочных механизма, которые могут удлиняться или укорачиваться в продольном направлении. Каждый установочный механизм закреплен посредством первого шарнира в неподвижной раме так, что он может поворачиваться во всех направлениях относительно рамы. Каждый установочный механизм присоединен одним концом посредством второго шарнира к подвижной позиционирующей головке. К позиционирующей головке также присоединен жесткий манипулятор, который проходит от нее между установочными механизмами. Манипулятор удерживается универсальным шарниром в радиальном направлении, но может перемещаться вдоль своей оси относительно этого шарнира, жестко соединенного с рамой. Каждый установочный механизм снабжен датчиком длины (LS1, LS2, LS3), которые образуют часть системы (S1) управления положением (X, Y, Z) позиционирующей головки в рабочей зоне робота. Эта система управления положением взаимодействует с системой (R2) регулирования с обратной связью, предназначенной для корректировки положения (X, Y, Z) позиционирующей головки в рабочей зоне, причем система (S1) управления положением и система (R2) регулирования с обратной связью работают в соответствии с различными системами координат. 2 с. и 6 з.п.ф-лы, 3 ил.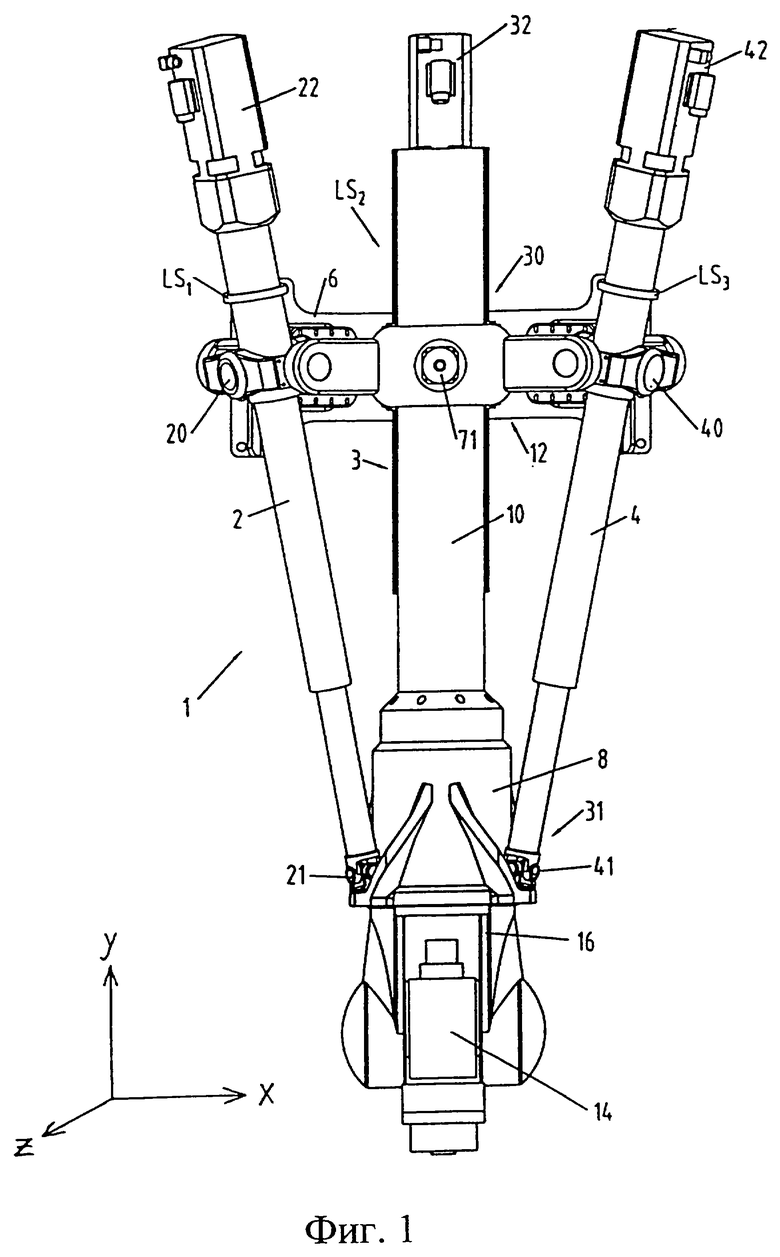
| US 4790718 A, 13.12.1988 | |||
| Система управления манипулятором | 1978 |
|
SU746402A1 |
| Способ получения из виноградных семян масла и энотаннина | 1950 |
|
SU91663A1 |
| SE 452279 B, 23.11.1987. | |||

