Изобретение относится к средствам установки оборудования на летательном, преимущественно космическом, аппарате (КА), где требуется точная угловая и линейная регулировка положения агрегатов на изделии (в т.ч. при летно-конструкторских испытаниях).
Устройство установки агрегатов на изделии (в т.ч. КА) предназначено для линейного регулирования агрегатов по двум взаимно перпендикулярным направлениям на требуемую величину, а также для углового регулирования агрегатов с высокой точностью в небольшом диапазоне углов.
Из патентной литературы известен транспортно-технологический агрегат, состоящий из регулируемой по углу опорной платформы относительно рамы, для сборки и подготовки блоков КА (см. патент РФ 2252179, МПК B64G 5/00, 04.02.2003).
Недостатками данного устройства являются невозможность линейного регулирования положения устанавливаемых агрегатов относительно опорной платформы и невозможность применения указанных конструктивных решений на изделиях, подвергающихся летно-конструкторским испытаниям.
Техническим результатом данного устройства является:
- обеспечение требуемого линейного регулирования агрегатов (на ±45 мм) вдоль одной оси и (на ±30 мм) вдоль оси, перпендикулярной данной;
- обеспечение требуемой точности линейного регулирования агрегатов (±0,5 мм);
- обеспечение требуемого углового регулирования совместно всех агрегатов (до ±1°) вокруг двух взаимно перпендикулярных осей;
- обеспечение требуемой точности углового регулирования агрегатов (±5°);
- обеспечение возможности автономной сборки и испытаний агрегатов на силовой призме, установленной на регулируемом основании;
- обеспечение жесткости конструкции при инерционном нагружении агрегатов при выведении КА (nх=6,5; nу=4,5);
- обеспечение требуемой собственной частоты конструкции (не ниже 15 Гц);
- обеспечение требуемой величины зазора между регулирующим основанием и плоскостью крепления данного основания на изделии (не менее 50 мм);
- обеспечение возможности работоспособности конструкции в широком диапазоне температур (-50°С…+50°С);
- обеспечение технологичности и собираемости конструкции в цеховых условиях;
- обеспечение минимального габарита конструкции регулируемого основания;
- обеспечение минимального количества узлов и их минимальная масса;
- обеспечение ремонтопригодности конструкции.
Указанный технический результат достигается тем, что устройство установки агрегатов на изделии содержит сборку силовой конструкции с узлами крепления агрегатов и регулируемое основание с установленной на нем сборкой, закрепляемое на изделии. В соответствии с изобретением силовая конструкция выполнена в виде треугольной (в поперечном сечении) призмы. Узлы крепления агрегатов выполнены с возможностью линейного регулирования положения каждого агрегата, для чего вдоль треугольной призмы выполнено четыре паза и две риски с функцией возможности линейного регулирования с требуемым диапазоном места расположения каждого агрегата вдоль призмы. Регулируемое основание имеет регулировочную плиту, три регулирующих узла, размещенных по треугольнику углового регулирования, и фиксирующий узел, а также шесть пазов на плите регулировочной перпендикулярно продольному направлению треугольной призмы, соответствующих шести ответным пазам на треугольной призме, и посадочные места под элементы контрольные для косвенного и прямого метода угловых измерений положения агрегатов. Конструкция регулируемого основания выполнена по схеме расположения двух из трех регулирующих узлов внутри контура треугольной призмы, а третий узел расположен напротив агрегатов на максимально возможном расстоянии за контуром треугольной призмы в пределах предназначенного места для устройства установки агрегатов на изделии для снижения влияния рабочего тела агрегатов на регулирующий узел.
Далее устройство установки агрегатов на изделии поясняется более подробно с использованием фигур 1, 2, 3, 4, 5, 6а, 6б в декартовой системе координат {0,X,Y,Z}.
На фиг.1 показан вид сбоку на устройство установки агрегатов на изделии, где два агрегата 1 установлены в треугольную призму 2 с помощью болтового соединения 3 с контровкой с помощью проволоки 4 и пломбы 5 в четырех точках для каждого агрегата 1, а треугольная призма 2 крепится к регулируемому основанию 6 с помощью болтового соединения 7 с контровкой с помощью самоконтрящейся гайки 8, при этом агрегаты 1 в треугольной призме 2 на регулируемом основании 6 крепятся к изделию 9, куда устанавливается сборка. Декартова система координат {0,X,Y,Z} является базовой для изделия 9. YН - номинальная координата регулируемого основания 6; ZН - номинальная координата треугольной призмы 2; ΔY - зазор между регулируемым основанием 6 и изделием 9; ΔZ - диапазон линейного регулирования агрегатов 1 с треугольной призмой 2 вдоль оси Z; Δ1 - запас по диапазону ΔZ; Δ2 - запас по зазору ΔY; α°- угол установки агрегатов 1 (номинал); ±n' - допуск угла α°.
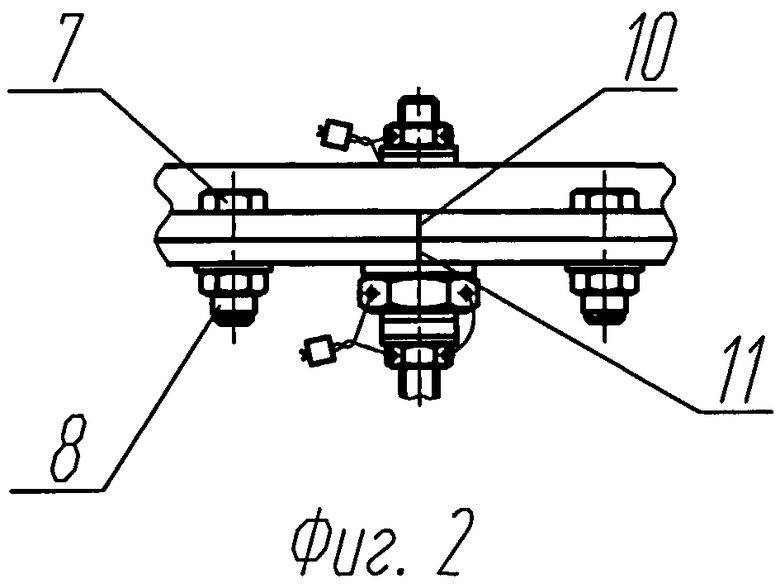
На фиг.2 показаны риски 10, 11 для линейного регулирования агрегатов 1 совместно с треугольной призмой 2 вдоль оси Z (см. фиг.1).
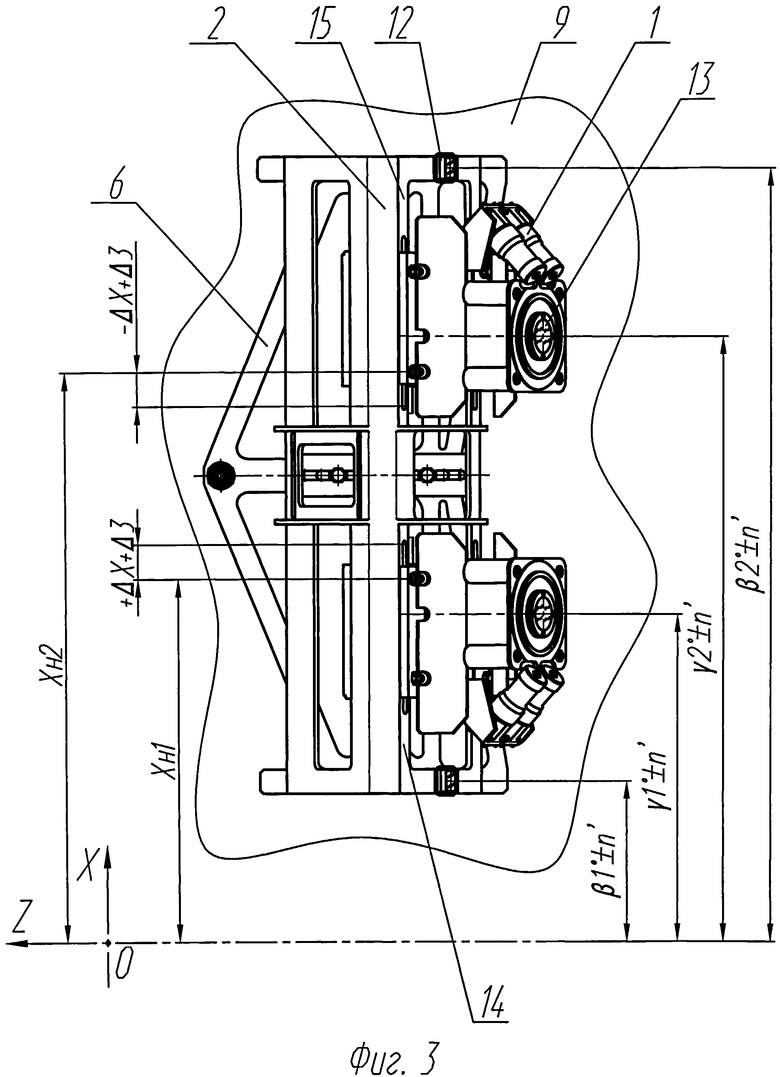
На фиг.3 показано устройство установки агрегатов на изделии в горизонтальной проекции, где два агрегата 1 установлены в треугольную призму 2 и на регулируемое основание 6, которое крепится к изделию 9, где, кроме того, устанавливаются элементы контрольные (КЭ) 12 для косвенного метода угловых измерений или КЭ 13 для прямого метода угловых измерений положения агрегатов 1, при этом количество и место установки КЭ 12, 13 определяется схемой угловых измерений для изделия 9 и агрегатов 1. Декартова система координат {0,X,Y,Z} является базовой для изделия 9. Хн1 - номинальная координата болтового соединения крепления первого агрегата 1 к треугольной призме 2; Хн2 - номинальная координата болтового соединения крепления второго агрегата 1 к треугольной призме 2, ΔХ - диапазон линейного регулирования агрегатов 1 вдоль оси X; Δ3 - запас по диапазону ΔХ; β1° - угол установки посадочной поверхности 14 на треугольной призме 2 первого агрегата 1 (номинал); β2° - угол установки посадочной поверхности 15 второго агрегата 1 (номинал); γ1° - угол установки первого агрегата 1 (номинал); γ2° - угол установки второго агрегата 1 (номинал); ±n' - допуск углов β1°, β2°, γ1°, γ2°. При этом углы β1°, β2° измеряются в косвенном методе измерений углового положения агрегатов 1, а углы γ1°, γ2° - в прямом методе измерений.
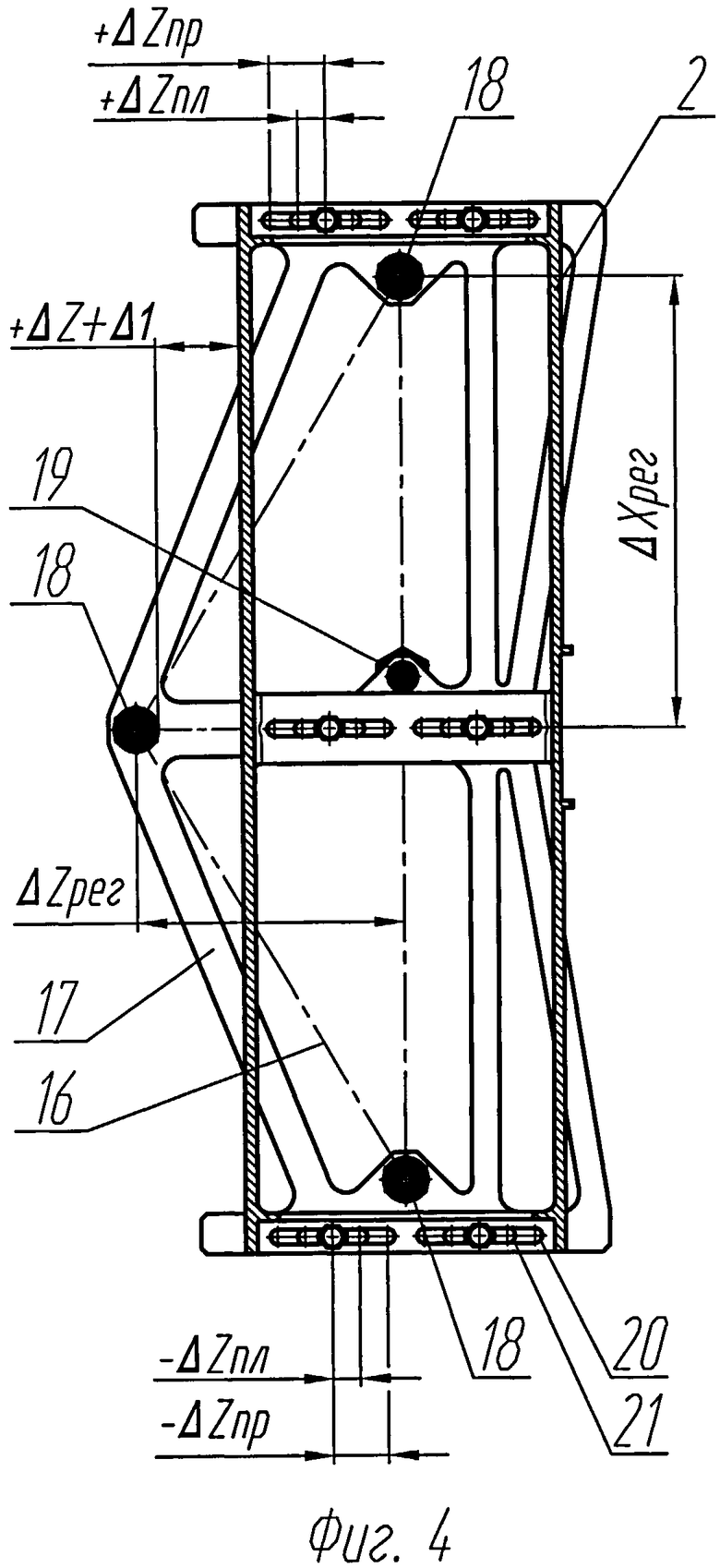
На фиг.4 показан разрез устройства установки агрегатов на изделии по треугольной призме 2, где указаны треугольник углового регулирования 16 и конструкция регулируемого основания 6, это плита регулировочная 17, регулирующий узел 18 (три штуки), фиксирующий узел 19. Кроме того, указаны пазы (шесть штук) 20 на треугольной призме 2 и ответные пазы (шесть штук) 21 на плите регулировочной 17. А также указана ΔХрег - база треугольника регулирования 16 вдоль оси Х (см. фиг.1, 3) и ΔZрег - база треугольника регулирования 16 вдоль оси Z (см. фиг.1, 3). ΔХрег, ΔZрег совместно с конструкцией регулирующего узла 18 определяют шаг углового регулирования Ррег. При этом Ррег<n, где n - допуск для углов α°, γ1°(β1°), γ2°(β2°) установки агрегатов 1 (см. фиг.1, 3). При необходимости n может быть различным для указанных углов (определяется требованиями по установке агрегатов 1). Также ΔZпр - диапазон линейного регулирования агрегатов 1 с треугольной призмой 2, определяется длиной паза 20; ΔZпл - диапазон линейного регулирования агрегатов 1 с треугольной призмой 2, определяется длиной паза 21. При этом соотношение длин пазов 20, 21 определяется конструкцией треугольной призмы 2 и плиты регулировочной 17, а диапазон ΔZ=ΔZпр+ΔZпл. Полный диапазон линейного регулирования агрегатов 1 вдоль оси Z: ±(ΔZ+Δ1).
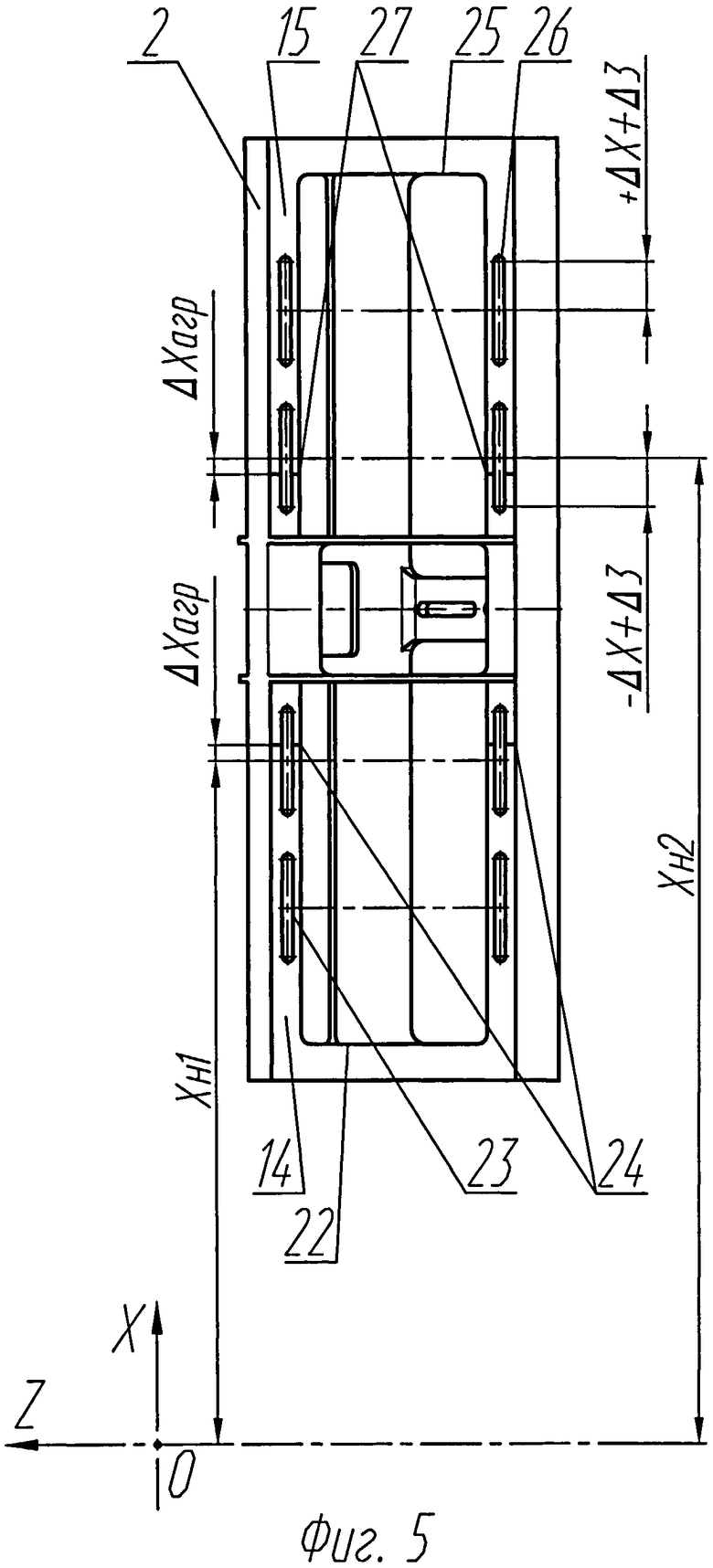
На фиг.5 показана треугольная призма 2 с посадочной поверхностью 14 для первого агрегата 1 и 15 для второго агрегата 1, где на поверхности 14 выполнены прямоугольное отверстие 22 для возможности установки первого агрегата 1 и четыре паза 23 для линейного регулирования первого агрегата 1 вдоль оси Х в пределах диапазона регулирования, а для возможности измерения номинального и конечного линейного положения первого агрегата 1 выполнены риски 24; также на поверхности 15 выполнены прямоугольное отверстие 25 для возможности установки второго агрегата 1 и четыре паза 26 для линейного регулирования второго агрегата 1 вдоль оси Х в пределах диапазона регулирования, а для возможности измерения номинального и конечного линейного положения первого агрегата 1 выполнены риски 27. Кроме того, указано ΔХагр - расстояние между соответствующими координатами Хн1, Хн2 и основанием агрегатов 1, определяемое конструкцией агрегатов 1. Полный диапазон линейного регулирования агрегатов 1 вдоль оси X:±(ΔХ+Δ3).
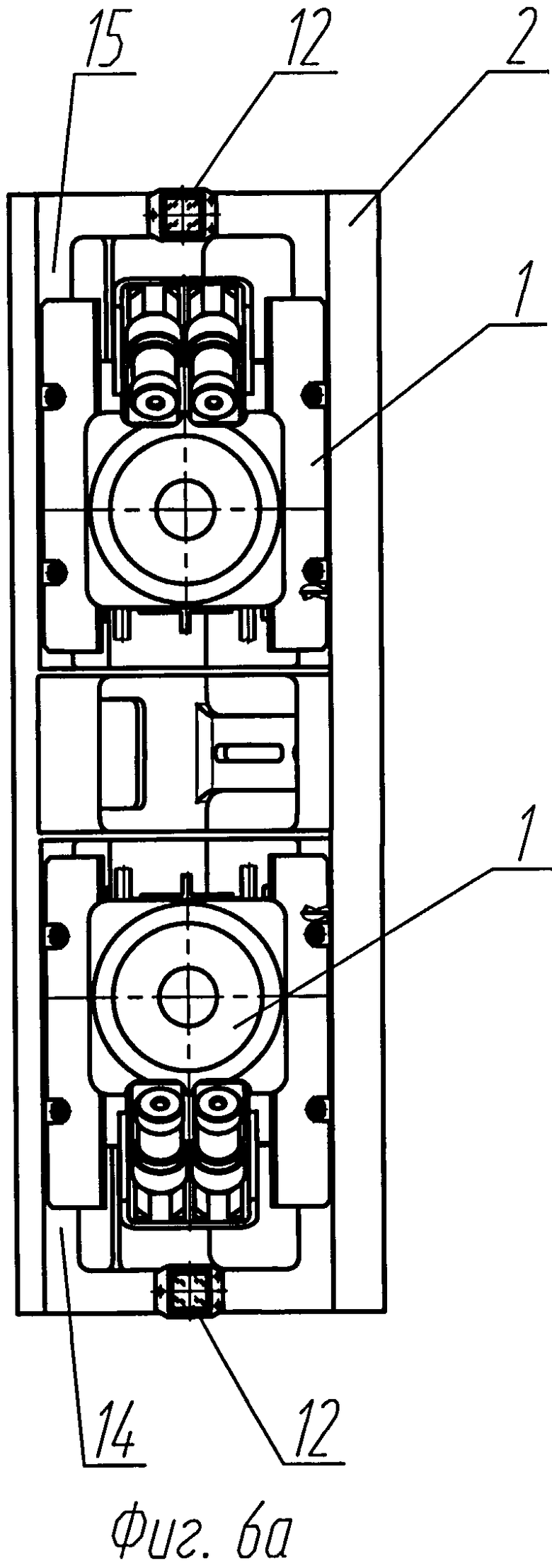
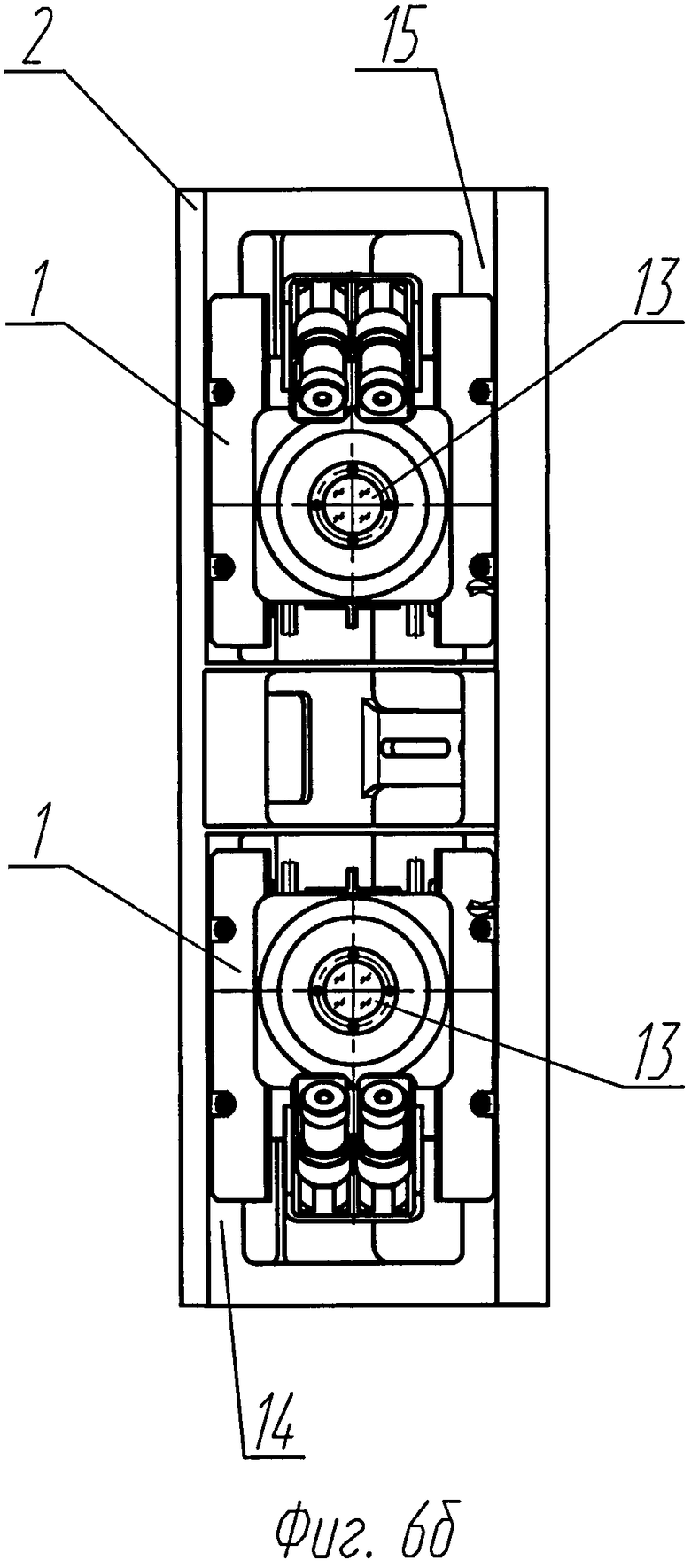
На фиг.6а и 6б показаны агрегаты 1 на треугольной призме 2, где первый и второй агрегаты 1 установлены на соответствующие посадочные поверхности 14 и 15 треугольной призмы 2, и указаны КЭ 12 и 13 (см. фиг.1, 3) для косвенного и прямого метода угловых измерений положения агрегатов 1 соответственно.
При монтаже агрегатов 1 на изделие 9 агрегаты 1 устанавливают на треугольную призму 2 в номинальное линейное положение, совмещая риски линейного регулирования 24, 27 с торцом соответствующего агрегата 1, а треугольную призму 2 с агрегатами 1 устанавливают в номинальное линейное положение на регулируемое основание 6, установленное в номинальное угловое положение относительно изделия 9, совмещая риски линейного регулирования 10, 11; затем устанавливают, в случае необходимости, в требуемое линейное положение, перемещая на требуемую в пределах диапазона линейного регулирования величину агрегаты 1 относительно рисок 24, 27 и 10, 11 (вместе с треугольной призмой 2); и регулируют, в случае необходимости, угловое положение агрегатов 1 на регулируемом основании 6 в пределах диапазона углового регулирования, измеряя косвенным или прямым методом фактическое угловое положение агрегатов 1 относительно изделия 9.
Кроме того, принципиально конструкция устройства установки агрегатов на изделии состоит из двух составных частей: это сборка силовой конструкции с агрегатами и регулируемое основание 6. Конструкция сборки силовой конструкции с агрегатами определяется конструкцией агрегатов 1 и требованиями по их установке. В разработанное устройство устанавливаются два агрегата 1 в общей в форме прямоугольной призмы, что определяет силовую конструкцию в виде треугольной призмы 2, в которой выполнены отверстия 22, 25 для возможности установки агрегатов 1. Крепление каждого агрегата 1 к треугольной призме 2 осуществления болтовым соединением с контровкой с помощью проволоки 4 и пломбы 5 в четырех точках. При этом треугольная призма 2 может быть выполнена из металла или неметалла с требуемым силовым набором или без него. Для возможности линейного регулирования каждого агрегата 1 вдоль треугольной призмы 2 с требуемым диапазоном предусмотрены четыре паза 23 (26) и две риски 24 (27) на треугольной призме 2 для установки одного агрегата 1 в номинальное положение, а затем и в требуемое, где изменение линейного положения измеряется расстоянием от риски 24 (27) до кромки агрегата 1, от которой происходит установка в номинальное положение. Пазы 23 (26) в треугольной призме 2 выполняются в случае, когда на агрегате 1 предусмотрены отверстия (а не самостоятельные пазы) для крепления его к треугольной призме 2. При этом помимо требуемой длины паза 23 (26), включающей диапазон линейного регулирования вдоль треугольной призмы 2, предусматривается соответствующий размер и форма отверстий 22, 25 в треугольной призме 2, куда устанавливаются агрегаты 1, чтобы обеспечить требуемое линейное перемещение. А также при линейном регулировании в номинальном и конечном положении агрегатов 1 их крепление осуществляется указанным способом (на четырех болтовых соединениях с контровкой для каждого из агрегатов 1). Регулируемое основание, состоящее из плиты регулировочной 17 и трех регулирующих по углу узлов 18 с фиксирующим узлом 19 (при необходимости), необходимо для возможности автономной сборки треугольной призмы 2 с агрегатами 1, а также для линейного регулирования положения агрегатов 1 совместно с треугольной призмой 2 в направлении, перпендикулярном долевому направлению треугольной призмы 2, в пределах требуемого диапазона с угловым регулированием положения агрегатов 1 совместно с треугольной призмой 2 в диапазоне единиц градусов. При этом для возможности линейного регулирования положения агрегатов 1 совместно с треугольной призмой 2 в направлении, перпендикулярном долевому направлению треугольной призмы 2, с требуемым диапазоном предусмотрены по шесть пазов 20, 21 и две риски 10, 11 на треугольной призме 2 и плите регулировочной 17 соответственно. Треугольная призма 2 крепится на плите регулировочной 17 с помощью болтовых соединений в шести точках (по числу пазов) с контровкой с помощью самоконтрящейся гайки. Выбранная комбинация выполнения пазов в треугольной призме и плите регулировочной (вместо комбинации отверстие-паз) позволяет увеличить жесткость плиты за счет уменьшения жесткости призмы вблизи мест крепления. Установка агрегатов 1 совместно с треугольной призмой 2 при линейном регулировании в направлении, перпендикулярном долевому направлению треугольной призмы 2, в номинальном положении осуществляется за счет совпадения рисок на треугольной призме 2 и плите регулировочной 17, а установка в требуемое линейное положение определяется величиной расстояния между рисками в пределах требуемого диапазона. При этом само линейное регулирование агрегатов 1 в двух взаимно перпендикулярных направлениях необходимо, например, для ориентирования агрегатов 1 относительно центра масс (ЦМ) изделия 9, куда эти агрегаты 1 устанавливаются (после определения фактического положения ЦМ). Кроме того, три регулирующих узла 18 обеспечивают угловое регулирование агрегатов 1 совместно с треугольной призмой 2 и плитой регулировочной 17 на единицы градусов с точностью единиц угловых минут по двум направлениям: вокруг оси, параллельной долевому направлению треугольной призмы 2, а также оси, перпендикулярной долевому направлению треугольной призмы 2 и параллельной основанию изделия 9, куда устанавливается вся сборка. Конструкция регулирующих узлов 18 содержит втулку сферическую с цилиндрическим участком для возможности соединения узла резьбовым соединением с плитой регулировочной 17 и другие ответные элементы, позволяющие осуществить угловой поворот плиты. Плита регулировочная 17 может быть изготовлена из металла или неметалла. Ее конструкция определяется требованиями по жесткости и собственной частоте. При этом из-за большой жесткости треугольной призмы 2 требования по жесткости плиты регулировочной 17 существенно снижаются. Для обеспечения минимального габарита конструкции регулируемого основания 6 выбрана схема расположения двух из трех регулирующих узлов 18 внутри контура треугольной призмы 2, а третий узел 18 расположен напротив агрегатов 1 на минимально возможном расстоянии за контуром треугольной призмы 2 для снижения влияния рабочего тела агрегатов 1 на регулирующий узел 18. При этом уменьшение базы треугольника в схеме углового регулирования отвечает требованию регулирования на единицы градусов. Также для увеличения собственной частоты конструкции допускается введение в схему углового регулирования дополнительного фиксирующего узла 19 (определяется требованиями по частоте). Конструкция фиксирующего узла 19 обеспечивает его закрепление на плите регулировочной 17 с помощью резьбового соединения в номинальном и конечном угловом положении плиты регулировочной 17 при регулировании тремя регулирующими узлами 18. Кроме того, требуемый зазор между плитой регулировочной 17 и изделием 9, куда устанавливается регулируемое основание 6, определяется конструкцией плиты регулировочной 17 и регулирующих и фиксирующего узлов 18, 19. Определение фактического углового положения агрегатов 1 осуществляется оптическим способом относительно требуемых баз с требуемой точностью. При этом оптический контрольный элемент (КЭ) устанавливается на время измерений или непосредственно на агрегаты 1 (прямой метод) или на поверхность треугольной призмы 2, куда агрегаты 1 установлены (косвенный метод).
К достоинствам изобретенного устройства установки агрегатов на изделии можно отнести обеспечение возможности автономной сборки и испытаний агрегатов на силовой призме, установленной на регулируемом основании; обеспечение линейного регулирования агрегатов в двух взаимно перпендикулярных направлениях в требуемом диапазоне с точным угловым регулированием агрегатов по двум углам в небольшом диапазоне; а также реализуемость в стандартных цеховых условиях, технологичность и, как следствие, надежность, и, кроме того, в случае необходимости имеется возможность производить демонтаж силовой призмы с агрегатами с регулируемого основания без потери точности углового положения агрегатов, что обеспечивает ремонтопригодность конструкции, а также возможность независимо производить угловое регулирование регулируемого основания при необходимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНСТРУКЦИЯ ВЕРХНЕГО СТРОЕНИЯ ПУТИ ВЫСОКОСКОРОСТНОЙ ЖЕЛЕЗНОЙ ДОРОГИ И СПОСОБ ЕЕ СООРУЖЕНИЯ | 2024 |
|
RU2828124C1 |
| РЕГУЛИРУЮЩИЙ УЗЕЛ | 2012 |
|
RU2515001C1 |
| Манипулятор для бурильных машин | 1981 |
|
SU976053A1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ КРУПНОФОРМАТНЫХ НАВЕСНЫХ ОБЛИЦОВОЧНЫХ ПАНЕЛЕЙ | 2020 |
|
RU2735007C1 |
| ПОДШИПНИКОВАЯ ОПОРА | 2014 |
|
RU2574509C1 |
| Устройство для сборки охватываемой и охватывающей деталей типа вал-втулка | 1982 |
|
SU1215255A1 |
| Поворотный стол с газостатической опорой | 2022 |
|
RU2788876C1 |
| Устройство для внутреннего шлифования | 2023 |
|
RU2813450C1 |
| ОПТИЧЕСКИЙ РЕЗОНАТОР МОЩНОГО ЛАЗЕРА | 1991 |
|
RU2029421C1 |
| КОМПЛЕКС ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ СКВАЖИННЫХ ИНКЛИНОМЕТРОВ | 2010 |
|
RU2439493C1 |
Изобретение относится к средствам установки оборудования на летательном, преимущественно космическом, аппарате (КА), где требуется точная угловая и линейная регулировка положения агрегатов на изделии (в т.ч. при летно-конструкторских испытаниях). Устройство установки агрегатов (1) на изделии (9) содержит треугольную (в поперечном сечении) силовую призму (2). Агрегаты (1) установлены в призму (2) с помощью болтового соединения (3) с контровкой при помощи проволоки (4) и пломбы (5) в четырех точках для каждого агрегата. Призма (2) установлена с помощью болтового соединения (7, 8) на регулируемом основании (6). Конструкция устройства обеспечивает возможность линейного регулирования положения агрегатов (1) вдоль продольной оси, а также перпендикулярно продольной оси: ΔZ, ΔY (с запасами Δ1 - по диапазону ΔZ и Δ2 - по зазору ΔY). Возможно точное регулирование положения агрегатов в небольшом диапазоне углов α°± n' относительно изделия (9). Имеется возможность автономной сборки и испытаний агрегатов (1) на силовой призме (2). При необходимости возможен демонтаж призмы (2) с агрегатами с основания (6) без потери точности углового положения агрегатов (1). Техническим результатом данного изобретения является возможность линейного регулирования агрегатов по двум взаимно перпендикулярным направлениям на требуемую величину, а также углового регулирования агрегатов с высокой точностью в небольшом диапазоне углов. 7 ил.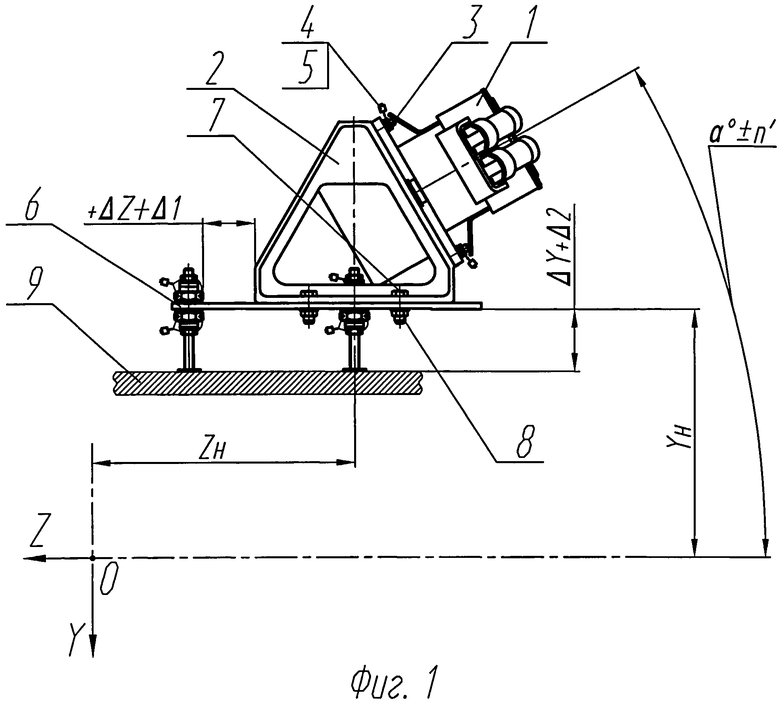
Устройство установки агрегатов на изделии, содержащее сборку силовой конструкции с узлами крепления агрегатов и регулируемое основание с установленной на нем сборкой, закрепляемое на изделии, отличающееся тем, что силовая конструкция выполнена в виде треугольной призмы, узлы крепления агрегатов выполнены с возможностью линейного регулирования положения каждого агрегата, для чего вдоль треугольной призмы выполнено по четыре паза и по две риски с функцией возможности линейного регулирования с требуемым диапазоном места расположения каждого агрегата вдоль призмы, регулируемое основание имеет регулировочную плиту, три регулирующих узла, размещенных по треугольнику углового регулирования, и фиксирующий узел, а также шесть пазов на регулировочной плите перпендикулярно продольному направлению треугольной призмы, соответствующих шести ответным пазам на треугольной призме, и посадочные места под элементы контрольные для косвенного и прямого метода угловых измерений положения агрегатов, причем конструкция регулируемого основания выполнена по схеме расположения двух из трех регулирующих узлов внутри контура треугольной призмы, а третий узел расположен напротив агрегатов на максимально возможном расстоянии за контуром треугольной призмы в пределах предназначенного для устройства места на изделии для снижения влияния рабочего тела агрегатов на регулирующий узел.
| ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКИЙ АГРЕГАТ | 2003 |
|
RU2252179C2 |
| КОСМИЧЕСКИЙ МОДУЛЬ | 2007 |
|
RU2389660C2 |
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА БОЛЬШОЙ ПЛОЩАДИ | 2006 |
|
RU2309093C2 |
| АВТОМАТИЧЕСКИЙ ПОСТ ЭКОЛОГИЧЕСКОГО КОНТРОЛЯ | 2005 |
|
RU2297019C2 |
| МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ ЕРШЕЙ | 0 |
|
SU197500A1 |
| US 6196501 B1, 06.03.2001 | |||

