Изобретения относятся к области вооружения, а именно к наведению станкового автоматического оружия - пулемета, гранатомета на цель, и могут быть использованы для обеспечения эффективной стрельбы в условиях отсутствия или ограниченной оптической видимости (дождь, снег, туман, дымовая завеса, а также в ночное время), когда использование оптических средств малоэффективно. Изобретения могут быть использованы для обеспечения безопасности объектов и территорий.
Известен способ наведения автоматического станкового оружия на цель с помощью оптических средств, описанный в [1,2].
При использовании известного способа (см. [1,2]) в условиях отсутствия или недостаточной оптической видимости стрельба ведется по целям, обнаруживаемым по вспышкам выстрелов или звукам, длинными очередями или непрерывно с рассеиванием пуль по фронту, что требует большего расхода боеприпасов, при этом эффективность стрельбы значительно снижается.
Задача повышения эффективности применения автоматического оружия, надежного наведения автоматического оружия на цель в сложных погодных условиях, в любое время дня и суток решается с помощью предлагаемого способа, по которому на оружие с помощью устройства сопряжения устанавливают радиолокационный прицел - малогабаритную доплеровскую РЛС, антенна которой имеет привод, и дальность действия РЛС превышает дальность действительного огня оружия, при этом привод РЛС обеспечивает независимое от оружия сканирование антенны РЛС по направлению, фиксируют положение антенны на неподвижной части привода и в этом положении предварительно согласовывают (совмещают) ось канала ствола оружия с электрической осью диаграммы направленности (ДН) антенны РЛС, затем расфиксируют (освобождают) антенну, производят путем сканирования антенны РЛС поиск цели в секторе стрельбы оружия и определяют направление на цель, далее, удерживая антенну в направлении на цель, доводят положение ствола оружия по направлению на цель до стопорения антенны в положении совмещенной оси канала ствола оружия с электрической осью антенны РЛС, затем с помощью РЛС по максимуму сигнала от цели уточняют направление на цель, определяют дальность до цели и наводят оружие с зафиксированной на нем антенной РЛС по направлению и дальности для ведения стрельбы по цели.
Известно расположение радиолокационного прицела в непосредственной близости от оружия, однако, как предлагается в заявляемом способе, установление радиолокационного прицела непосредственно на оружии более эффективно, но при жестком креплении оружия в процессе стрельбы воздействующие на РЛС перегрузки предъявляют жесткие требования по прочности к РЛС, приводят к снижению точности стрельбы.
Задача снижения перегрузок в процессе стрельбы решается данным изобретением, согласно которому в устройство сопряжения, содержащее стойку с элементами крепления, дополнительно введен амортизатор, выполненный в виде жестко закрепленного на стойке корпуса с крышкой, на которой через механизм юстировки установлен радиолокационный прицел, крышка амортизатора шарнирно соединена пластинами, образующими параллелограмм и имеющими окна, в которых размещены ролики с осями, внутри корпуса амортизатора установлен с возможностью возвратно-поступательного перемещения подпружиненный стержень, взаимодействующий своими торцами с роликами, при этом ось подпружиненного стержня установлена параллельно оси канала ствола оружия.
На фиг.1а приведены схемы, поясняющие заявляемый способ, где:
этап 1 - процесс согласования оси канала ствола оружия и электрической оси ДН антенны РЛС,
этап 2 - поиск цели,
этап 3 - определение направления на цель и дальность,
этап 4 - доведение положения ствола оружия по направлению на цель в положение согласованных оптической оси канала ствола с электрической осью ДН антенны и введение в оружие данных по дальности.
На фиг.1б изображен общий вид системы наведения оружия, реализующей заявляемый способ;
на фиг.2 приведен вид устройства сопряжения в сечении по амортизатору;
на фиг.3 - вид устройства сопряжения сбоку;
на фиг.4 приведен пример выполнения механизма юстировки;
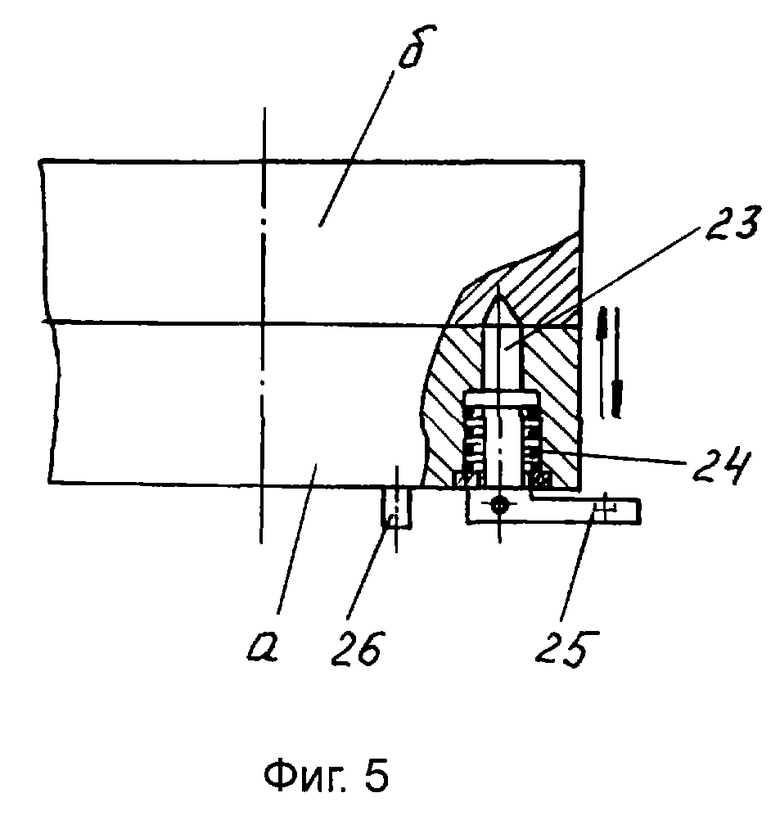
на фиг.5 приведен (в разрезе) пример выполнения механизма стопорения;
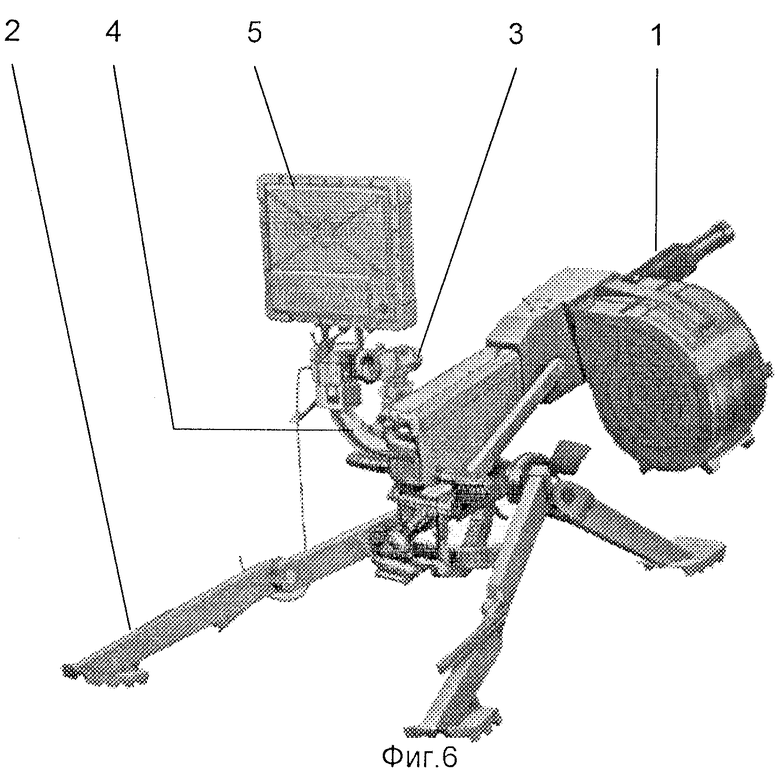
на фиг.6 приведен пример использования заявляемого способа для наведения гранатомета.
Система наведения станкового автоматического оружия на цель (фиг.1б), реализующая заявляемый способ (в приведенном системе автоматическое оружие - пулемет), включает автоматическое оружие 1 со станком 2 и оптическим прицелом 3. На автоматическом оружии 1 посредством устройства сопряжения 4 установлена малогабаритная доплеровская РЛС, включающая приемопередатчик 5 с антенной 6 и приводом 7, состоящим из неподвижной платформы "а", жестко закрепленной на механизме юстировки 8 и подвижной "б", вращаемой электродвигателем через редуктор. Механизм юстировки 8, в свою очередь, установлен на устройство сопряжения 4. На неподвижной платформе "а" привода 7 установлен механизм стопорения 9 подвижной платформы "б".
Заявляемое устройство сопряжения 4 РЛС с оружием включает жестко закрепленную на оружии стопку "в" с радиусной выемкой "г" для исключения перекрытия поля зрения прицела 3. На стойке "в" установлен амортизатор "д", выполненный в виде жестко закрепленного на стойке корпуса 10 (фиг.2) с крышкой 11, шарнирно соединенной посредством четырех осей 12 с двумя пластинами 13, образуя параллелограмм. В пластинах 13 выполнены окна "е", в которых размещены ролики 14 с осями 15. Внутри параллелограмма установлен, с возможностью возвратно-поступательного перемещения в стенках корпуса в "ж" и "з", стержень 16 с пружиной 17, взаимодействующий своими торцами с роликами 14, при этом ось стержня 16 расположена параллельно оси канала ствола оружия. На крышке 11 амортизатора закреплен механизм юстировки и фиксации 8, на котором установлена неподвижная платформа "а" привода 7 (фиг.1б). Механизм юстировки 8 (фиг. 2) обеспечивает перемещение и фиксацию антенны 6 в горизонтальной плоскости.
Пример выполнения механизма 8 приведен на фиг.4, который включает основание 18, на котором шарнирно, с возможностью вращения, закреплено посадочное место 19 для привода. Перемещение посадочного места 19 осуществляется в простейшем случае двумя винтами 20, взаимодействующими с упором 21, жестко связанным с посадочным местом 19 для стопорения винтов, в этом случае предусмотрены две гайки 22.
На неподвижной части "а" привода 7 установлен механизм стопорения 9, пример выполнения которого приведен на фиг. 5, где а - неподвижная платформа привода 7, б - подвижная платформа привода 7, 23 - стопор, 24 - пружина, 25 - ручка стопора, 26 - фиксатор положения стопора.
Заявляемый способ осуществляется следующим образом.
С помощью жестко закрепленного на антенне 6 дополнительного оптического прибора, например трубки холодной пристрелки ТХП, оптическая ось которой согласована с электрической осью антенны 6, приемопередатчика 5 и механизма юстировки 8, производят предварительно согласование электрической оси антенны РЛС с оптической осью прицела 3, которая в приведенном к нормальному бою оружии согласована с осью канала ствола.
Для этого при застопоренной стопором 23 подвижной части "б" привода 7 производят перемещение антенны в горизонтальной плоскости с помощью механизма юстировки 8 до совмещения оси ТХП с осью оптического прицела 3. Наведение осуществляется на перекрестие мишени или на удаленный ориентир. Аналогичное согласование производится и в вертикальной плоскости. После проведения предварительного согласования осей система готова к боевой работе и не требует повторной юстировки осей (при смене позиций или при снятии и установке РЛС на пулемет после их юстировки), что значительно уменьшает время развертывания комплекса оружия с РЛС и подготовки его к работе.
В выключенном положении механизма стопорения 9 осуществляют поиск цели радиолокационным сканированием (знакопеременным по направлению перемещением) антенны 6 по направлению в заданном секторе угол α. После обнаружения цели и определения направления на нее (угол β) освобождают фиксатор 26 (положения стопора механизма стопорения 9) и, удерживая антенну в направлении на цель, совмещают ось канала ствола оружия с электрической осью антенны РЛС, поворачивая ствол пулемета в сторону цели до фиксации подвижной части "б" привода 7 с приемопередатчиком 5 с помощью механизма стопорения 9, жестко связанного с оружием 1, и определяют дальность до цели по РЛС.
С помощью устройства наведения 27, например, электродвигатель и исполнительный механизм с приводом (или стрелок вручную), доводят положение ствола оружия совместно с РЛС по направлению до положения, соответствующего максимуму сигнала от цели), и производят наведение оружия (установку прицела по дальности) в вертикальной плоскости на рубеж поражения цели.
Предлагаемый способ позволяет значительно повысить эффективность применения оружия (пулемета, гранатомета) в любых погодных условиях, в любое время суток, как за счет заблаговременного обнаружения цели с помощью доплеровской РЛС на дальностях, превышающих дальность действия оружия, так и за счет комплексного использования оптических и радиолокационных средств: возможности ведения прицельного огня по оптическому прицелу, а также обеспечения возможности поражения цели при отсутствии оптической видимости по радиолокационному прицелу.
Конструкция устройства сопряжения обеспечивает сохранение направления электрической оси антенны в горизонтальной плоскости (направления на цель) в процессе стрельбы.
Источники информации
1. Руководство по 12,7-мм пулемету "Утес" (НСВ-12,7). - М.: Воениздат, 1978.
2. Наставление по стрелковому делу 7,62 мм. Пулемет Калашникова (ПК и ПКС). - М.: Воениздат, МОСССР, 1963.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЕДЕНИЕМ СНАЙПЕРСКОГО ОГНЯ | 2011 |
|
RU2474782C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ОРУЖИЕМ ОГНЕВОЙ ЗАЩИТЫ НОСИТЕЛЯ С РАДИОЛОКАЦИОННЫМ ПРИЦЕЛОМ | 2003 |
|
RU2230277C1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ | 1993 |
|
RU2077018C1 |
| СТРЕЛКОВОЕ ОРУЖИЕ СО СДВОЕННЫМ ПРИЦЕЛЬНЫМ УСТРОЙСТВОМ | 1994 |
|
RU2082937C1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ | 2009 |
|
RU2430325C2 |
| СТРЕЛКОВОЕ ОРУЖИЕ СО СДВОЕННЫМ ПРИЦЕЛЬНЫМ УСТРОЙСТВОМ | 1993 |
|
RU2088882C1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ | 1995 |
|
RU2100738C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| СПОСОБ ПРИСТРЕЛКИ АВТОМАТИЧЕСКОГО ДВУСТВОЛЬНОГО ОРУЖИЯ ЗЕНИТНОГО КОМПЛЕКСА | 2009 |
|
RU2401406C1 |
| ОТКРЫТЫЙ ПРИЦЕЛ ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ | 2008 |
|
RU2383847C2 |
Изобретение относится к области вооружения, в частности к наведению оружия на цель с использованием радиолокационного прицела. Радиолокационный прицел - малогабаритную доплеровскую РЛС с дальностью действия, превышающей дальность действительного огня оружия, устанавливают на оружии с помощью устройства сопряжения. Антенну РЛС устанавливают на привод, обеспечивающий независимое от ствола оружия сканирование антенны РЛС по направлению. Положение антенны фиксируют на неподвижной части привода и в этом положении предварительно согласовывают ось канала ствола оружия с электрической осью диаграммы направленности антенны РЛС. После расфиксации антенны посредством ее сканирования производят поиск цели, определяют направление на цель и, удерживая антенну в направлении на цель, доводят положение ствола оружия по направлению на цель до стопорения антенны в положении совмещенных осей канала ствола оружия и антенны РЛС. С помощью РЛС по максимуму сигнала от цели уточняют направление на цель, определяют дальность и наводят оружие с зафиксированной на нем антенной по направлению и дальности для ведения стрельбы по цели. Устройство сопряжения включает амортизатор, который позволяет снизить перегрузки во время стрельбы. Реализация изобретений позволяет повысить эффективность применения оружия и надежность наведения на цель в сложных погодных условиях. 2 с.п. ф-лы, 6 ил.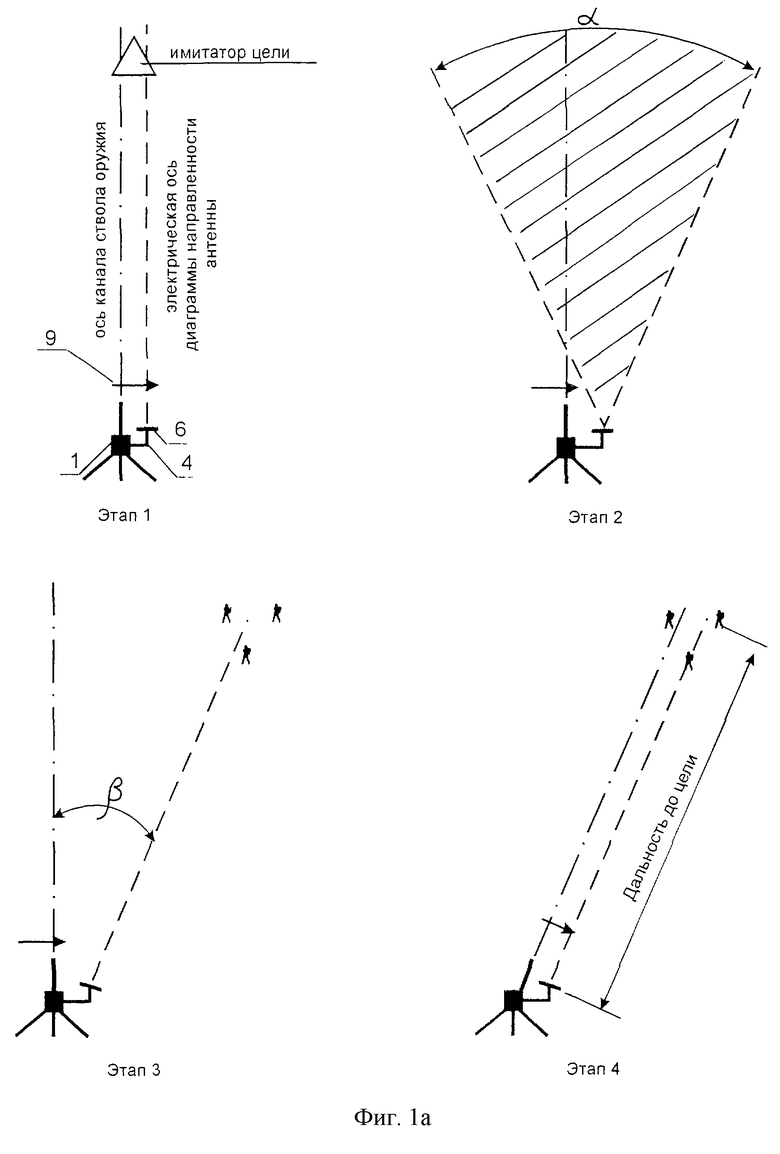
| ЭЛЕКТРОМАГНИТНЫЙ НАСОС | 2004 |
|
RU2330990C2 |
| РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2090825C1 |
| Способ получения пиросульфита натрия | 1981 |
|
SU1108072A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ПИВА | 1996 |
|
RU2103341C1 |
| DE 3816050 А1, 23.11.1989. | |||

