Текст описания в факсимильном виде (см. графическую часть)н
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 1999 |
|
RU2161814C1 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕПРАВОМЕРНЫХ ДЕЙСТВИЙ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2613918C2 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2448853C1 |
| СПОСОБ ВЫБОРА РЕЖИМА ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2450252C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ ДВИЖЕНИИ В КОЛОННЕ | 2007 |
|
RU2388057C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ | 2001 |
|
RU2190238C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |



















Изобретение предназначено для автоматического управления продольным движением автомобиля в условиях городского насыщенного транспортного потока. Достигаемым техническим результатом является снижение ошибок слежения по положению между автомобилем и впереди едущим транспортным средством. Устройство следящего управления продольным движением автомобиля содержит измеритель относительной скорости и расстояния между автомобилем и впереди едущим транспортным средством, задатчик опорной дистанции, формирователь разности измеренного расстояния и опорной дистанции, датчик удельной силы, развиваемой двигательно-тормозной системой автомобиля, блок управления, блок фильтрации данных измерений отклонения от опорной дистанции измеренного расстояния между автомобилем и впереди едущим транспортным средством, а также относительной скорости между автомобилем и впереди едущим транспортным средством, и блок оценивания величины, равной сумме ускорения впереди едущего транспортного средства и удельных, нормированных к собственной массе автомобиля сил сопротивления качению и воздуху автомобиля. 12 ил.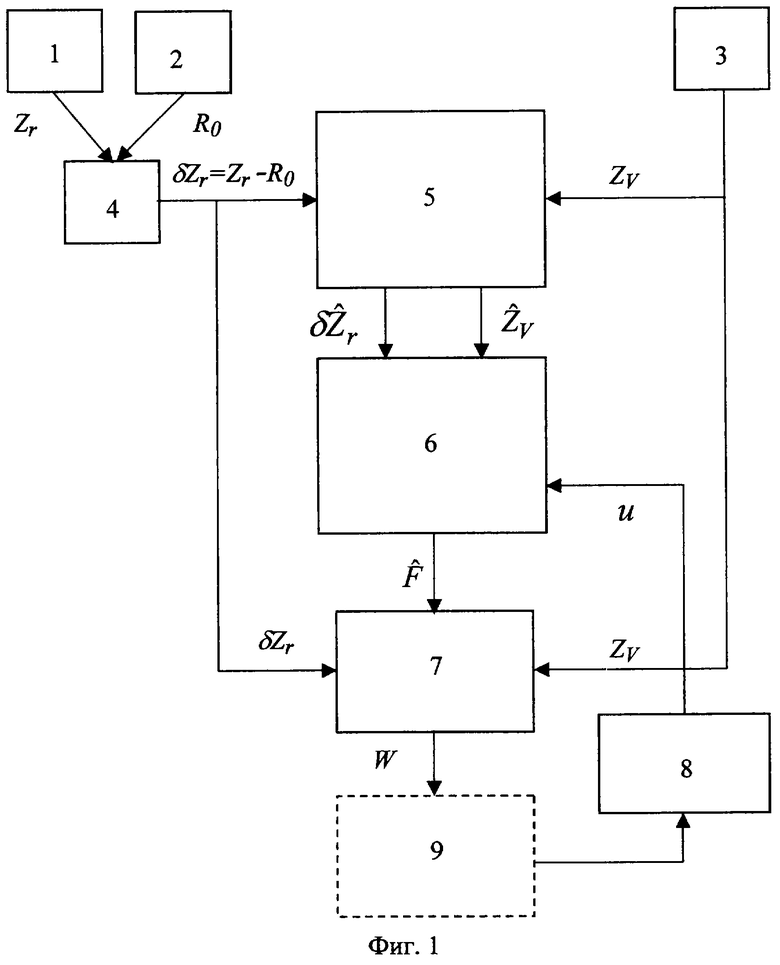
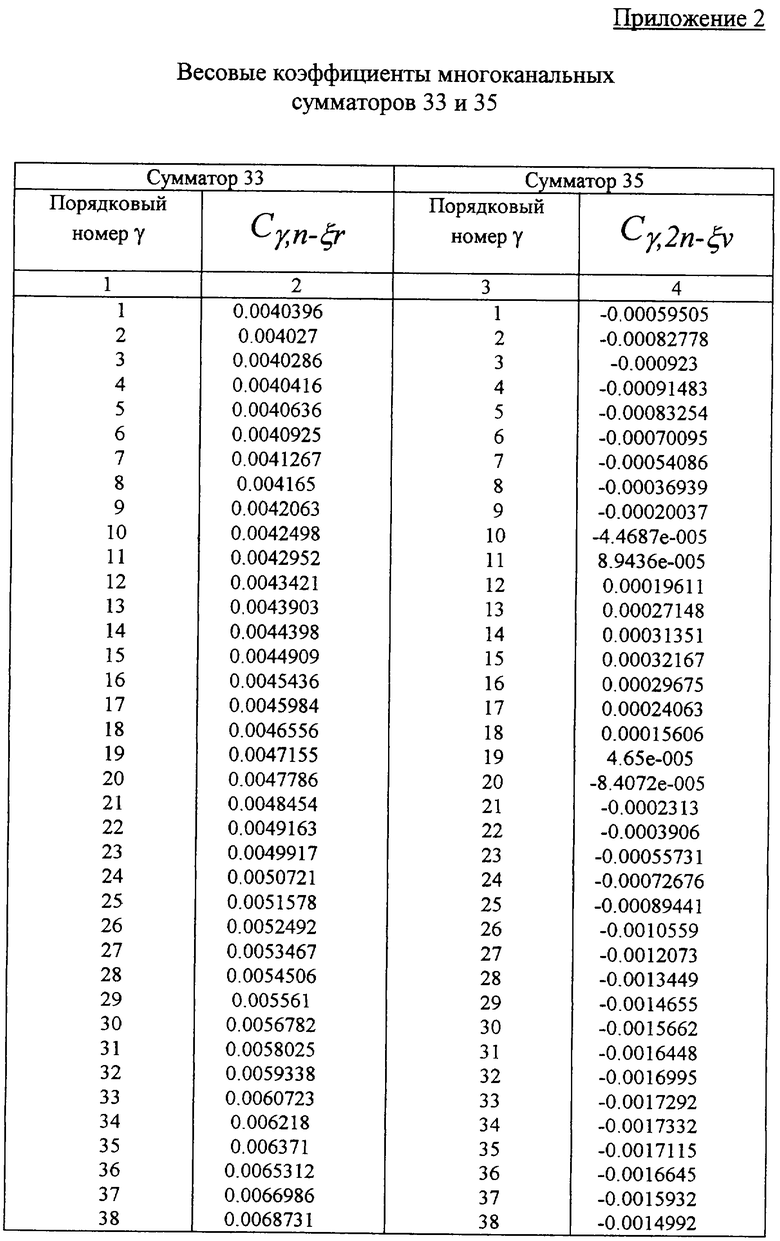
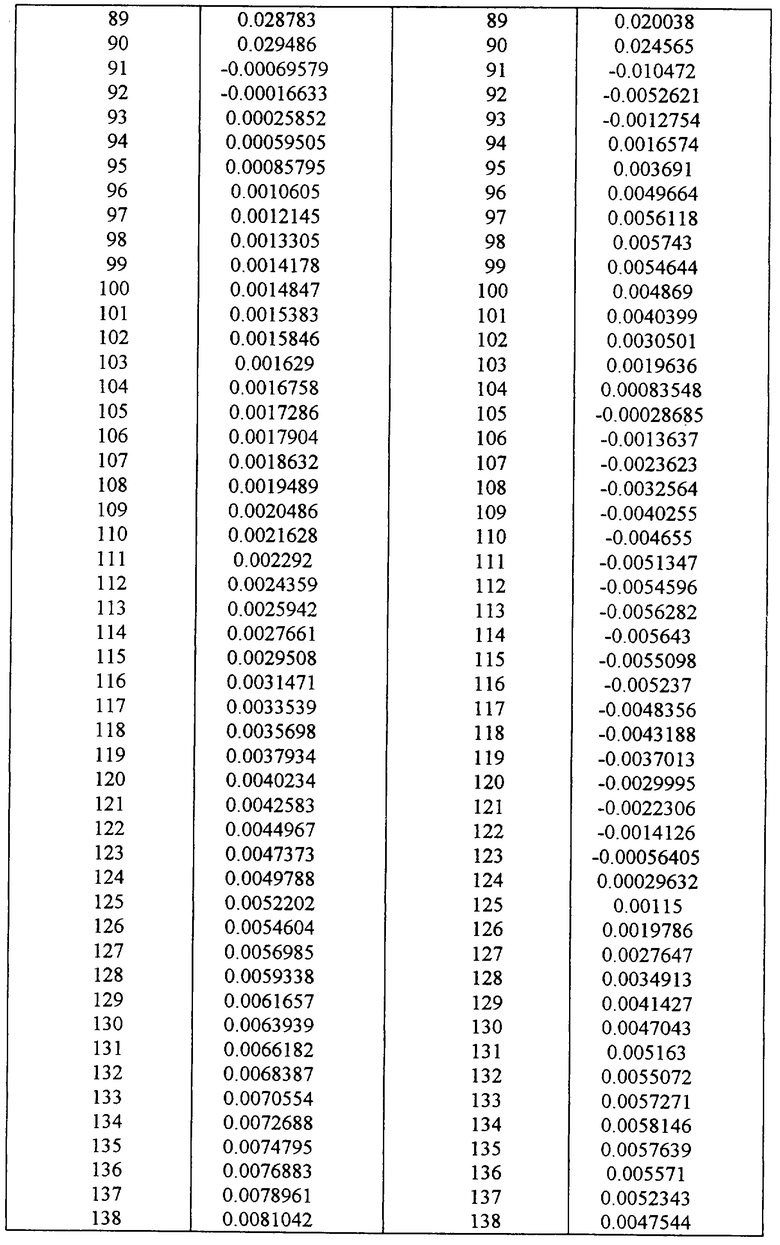
Устройство следящего управления продольным движением автомобиля, содержащее измерители относительной скорости и расстояния, задатчик опорной дистанции, формирователь разности измеренного расстояния и опорной дистанции, блок управления, при этом измеритель расстояния и задатчик опорной дистанции подключены ко входам формирователя разности измеренного расстояния и опорной дистанции, выход которого подключен к входу блока управления, к другому входу которого подключен измеритель относительной скорости, выход блока управления предназначен для подачи сигнала управления на двигательно-тормозную систему автомобиля, четыре интегратора, три формирователя разности, четыре сумматора, восемь усилителей и датчик удельной силы, развиваемой двигательно-тормозной системой автомобиля, при этом входы усилителей с нечетными номерами подключены к выходу первого формирователя разности, а входы усилителей с четными номерами подключены к выходу второго формирователя разности, выходы первого и второго, третьего и четвертого, пятого и шестого, седьмого и восьмого усилителей подключены попарно к первому и второму входам первого, второго, третьего и четвертого сумматоров, соответственно, кроме того, выход первого сумматора подключен ко входу первого интегратора, выход которого подключен к третьему входу второго сумматора, выход второго сумматора подключен ко входу второго интегратора, выход которого подключен к первому входу третьего формирователя разности и входу блока управления одновременно, выходы третьего и четвертого сумматоров подключены соответственно ко входам третьего и четвертого интеграторов, выходы которых соответственно подключены к первым входам первого и второго формирователей разности, одновременно выход четвертого интегратора подключен к третьему входу третьего сумматора, вход датчика удельной силы подключен к двигательно-тормозной системе автомобиля, а выход датчика удельной силы подключен ко второму входу третьего формирователя разности, выход которого подключен к третьему входу четвертого сумматора, отличающееся тем, что в него дополнительно включены первое и второе запоминающие устройства, первый и второй многоканальные сумматоры с весовыми коэффициентами суммирования, при этом первая половина каналов первого, а также второго многоканальных сумматоров подключены к ячейкам первого запоминающего устройства таким образом, что номера первой половины каналов первого и второго многоканальных сумматоров совпадают с номерами ячеек первого запоминающего устройства, а вторая половина каналов первого, а также второго многоканальных сумматоров подключены к ячейкам второго запоминающего устройства в порядке нарастания номеров ячеек второго запоминающего устройства, кроме того, вход первого запоминающего устройства подключен к выходу формирователя разности измеренного расстояния и опорной дистанции, вход второго запоминающего устройства подключен к выходу измерителя относительной скорости, а выходы первого и второго многоканальных сумматоров подключены ко вторым входам первого и второго формирователей разности, соответственно.
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 1999 |
|
RU2161814C1 |
| СПОСОБ КОНТРОЛЯ ВЕЛИЧИНЫ ДОПУСТИМОГО СБЛИЖЕНИЯ ДВУХ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033359C1 |
| DE 4100993 А1, 25.07.1991 | |||
| УСТРОЙСТВО АЭРАЦИИ ДЛЯ ЗАКРЫТЫХ ЕМКОСТЕЙ, ИЗВЛЕКАЕМОЕ БЕЗ ОТКАЧКИ АЭРИРУЕМОЙ ЖИДКОСТИ | 2019 |
|
RU2733608C1 |
| Способ стерилизации компонентов питательных бактериологических сред | 1961 |
|
SU145989A1 |

