Текст описания в факсимильном виде (см. графическую часть).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2003 |
|
RU2248498C1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП (ВАРИАНТЫ) | 2003 |
|
RU2240549C1 |
| УСТРОЙСТВО СИСТЕМЫ ДАТЧИКОВ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА | 2007 |
|
RU2336521C1 |
| УСТРОЙСТВО СИСТЕМЫ ДАТЧИКОВ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА | 2006 |
|
RU2325634C2 |
| УСТРОЙСТВО СИСТЕМЫ ДАТЧИКОВ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА (ВАРИАНТЫ) | 2005 |
|
RU2293312C1 |
| Способ внутритрубной диагностики и устройство для его осуществления (варианты) | 2021 |
|
RU2766370C1 |
| МЕХАНИЗМ КРЕПЛЕНИЯ ДАТЧИКА К КОРПУСУ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА | 2005 |
|
RU2298784C1 |
| МЕХАНИЗМ КРЕПЛЕНИЯ ДАТЧИКА К КОРПУСУ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА | 2005 |
|
RU2298783C1 |
| НОСИТЕЛЬ ДАТЧИКОВ ДЛЯ ВНУТРИТРУБНОГО ИНСПЕКЦИОННОГО СНАРЯДА (ВАРИАНТЫ) | 2002 |
|
RU2204113C1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2000 |
|
RU2163369C1 |

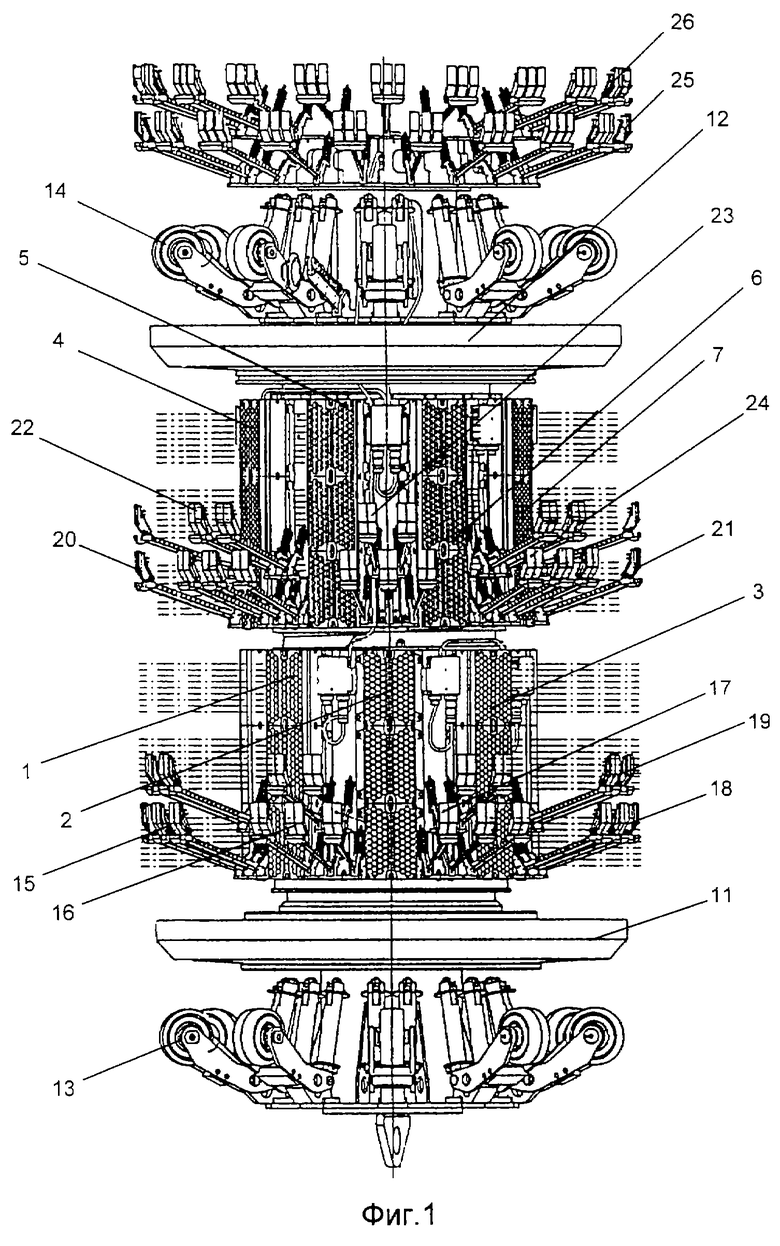
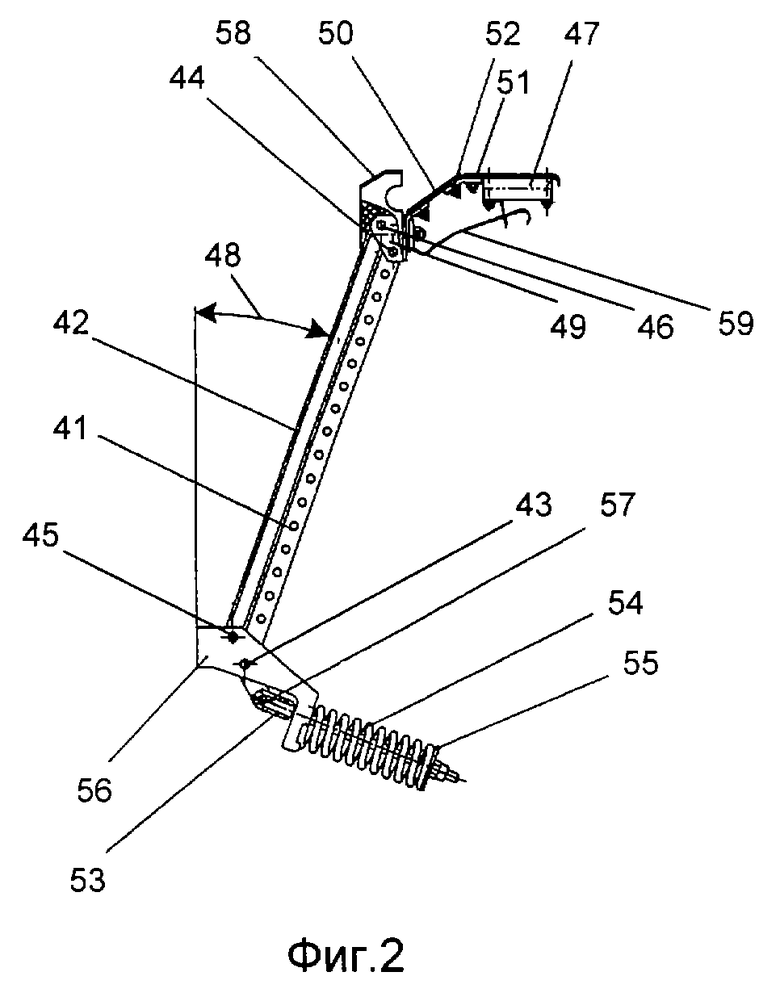
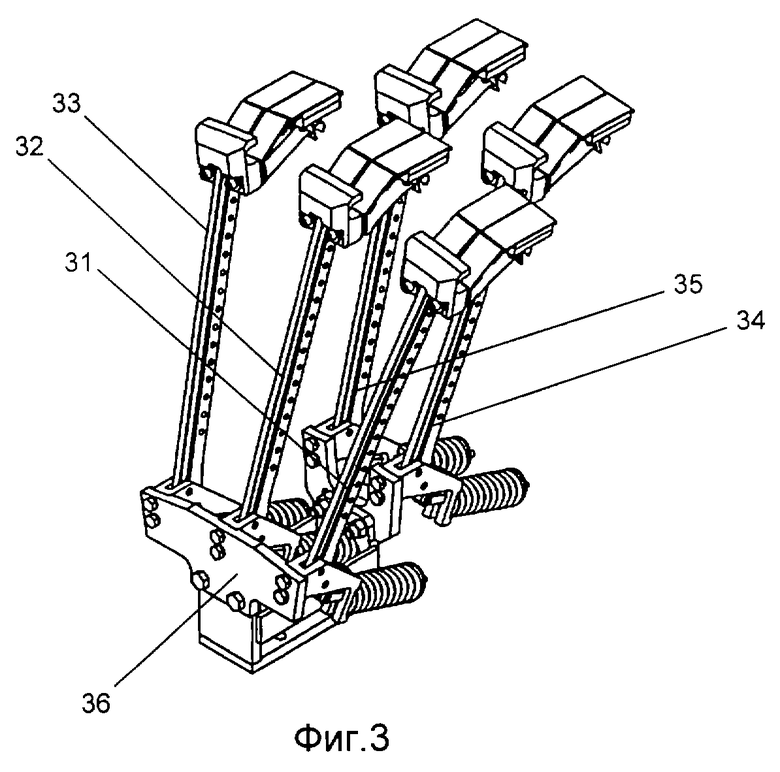
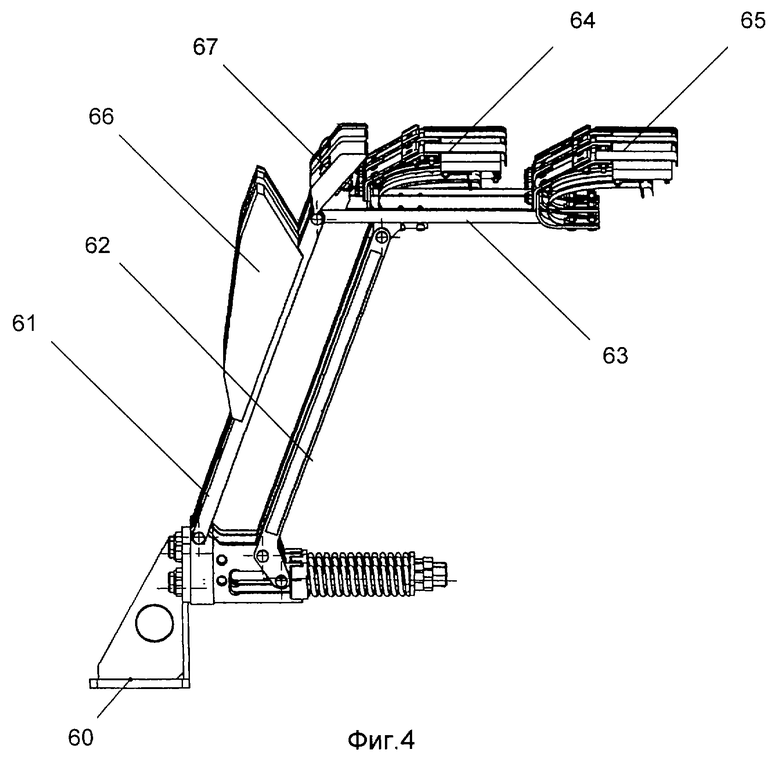
Заявленный внутритрубный дефектоскоп, пропускаемый внутри обследуемого трубопровода, содержит корпус, установленные на корпусе манжеты и контрольные датчики, а также средства измерений и обработки данных измерений. Датчики установлены в держателях, каждый держатель датчиков закреплен на корпусе дефектоскопа с помощью пары рычагов, способных поворачиваться в плоскости, проходящей через ось симметрии дефектоскопа. В каждом держателе датчиков все датчики находятся со стороны хвостовой части дефектоскопа по отношению к обеим осям вращения пары рычагов в этом держателе датчиков, расстояние между указанными осями вращения в держателе датчиков составляет не более 0,2 длины рычага. Сигналы с датчиков магнитного поля оцифровывают и записывают в накопитель бортового компьютера с привязкой к сигналам от других датчиков. После выполнения диагностического пропуска на заданном участке трубопровода магнитный дефектоскоп извлекают из трубопровода и переносят накопленные в процессе диагностики данные на компьютер вне дефектоскопа. Последующий анализ записанных данных позволяет сделать вывод о наличии дефектов и определить их размеры. Использование заявленного дефектоскопа позволяет увеличить проходимость дефектоскопа через протяженные искривленные участки сужений трубопровода и снизить относительный объем данных, по которым не могут быть идентифицированы дефекты стенки трубопровода. 5 з.п. ф-лы, 4 ил.
| Устройство для контроля дефектов труб | 1978 |
|
SU745386A3 |

