Изобретение относится к космической технике, а именно к устройствам крепления полезного груза и обеспечения внекорабельной деятельности оператора.
Известна кисть манипулятора [1] в системе дистанционного управления для захвата объекта, включающая средства захвата объекта со средствами центровки, средства контроля момента, прилагаемого к средствам центровки, средства управления выходным сигналом привода.
Однако указанное средство не позволяет стыковать полезные грузы, закрепленные на устанавливаемом узле, с приемным узлом и последующей ручной фиксацией рычажным механизмом.
Наиболее близким по технической сущности к заявляемому изобретению - прототипом является устройство в виде кольца адаптера полезного груза [2], в который входит приемный узел, закрепляемый на корпусе космического корабля, устанавливаемый узел с полезным грузом, n замков, где n=1,2...i, m рычажных механизмов, где m=1,2...k, и механизм управления.
Однако возможный ареал мест установки полезного груза, например, на внешней поверхности орбитального космического корабля, ограничен тем, что для надежной фиксации груза с предупреждением его возможных колебаний относительно корпуса космического корабля необходима установка не менее трех механизмов крепления, для обеспечения крепления груза обязательно необходим расход электрической энергии корабля-носителя и наличие электрических соединений с кораблем-носителем, необходимы электрические устройства управления процессом крепления, расположенные на корабле-носителе или доставляемом грузе.
Задачей изобретения является создание механизма автономного устройства многоразовой стыковки (расстыковки) полезного груза, например солнечной батареи, доставляемого, например, на находящийся на орбите космический корабль другим транспортным кораблем, или груза, доставляемого, например, внутри космического корабля с последующей установкой и креплением на внешней поверхности, например, корпуса или выносной фермы космического корабля одним или двумя операторами как с потреблением энергии космического корабля при использовании дистанционно управляемого манипулятора, например, типа ERA, так и вручную.
Задача решается тем, что в устройстве стыковки полезного груза преимущественно за пределами находящегося на орбите космического корабля, содержащем приемный узел, устанавливаемый узел с полезным грузом, n замков, где n=1,2...i, m рычажных механизмов, где m=1,2...k, в отличие от прототипа приемный узел выполнен в виде полого цилиндра, на днище которого по окружности меньшего диаметра равномерно размещены направляющие штыри, а по окружности большего диаметра - шаровые упоры, при этом на внешней цилиндрической поверхности приемного узла закреплена мишень для стыковки полезного груза, а устанавливаемый узел выполнен в виде полого цилиндра, на днище которого выполнены под направляющие штыри заходные конусы для грубой юстировки и гнезда под шаровые опоры для точной юстировки, причем внутри корпуса устанавливаемого узла соосно с гнездами закреплены замки, механически связанные с рукояткой фиксации, при этом по крайней мере каждый из n-1 замков связан с рукояткой фиксации через рычажный механизм, а каждый из замков выполнен в виде втулки, на которой с возможностью вращения относительно оси втулки установлен на подшипниках запорный диск, размещенный со стороны шарового упора, сухарей, поджатых гайкой к запорному диску через расположенные внутри втулки перпендикулярно ее оси механические затворы, на торцах которых, обращенных к запорному диску, выполнены штыри, входящие в направляющие пазы запорного диска.
Техническим результатом, достигаемым с помощью заявляемого изобретения, является обеспечение жесткого соединения полезного груза, например солнечной батареи, с корпусом или выносной фермой, например, космического корабля, имеющими приемные узлы с направляющими штырями и шаровыми упорами, как с применением дистанционно управляемого манипулятора, например, типа ERA, так и вручную с последующей фиксацией соединения рукояткой рычажного механизма одним или двумя операторами, и обеспечение возможности совершать многоразовую стыковку (расстыковку) полезного груза с базовой поверхностью космического корабля. Использование направляющих штырей и заходных конусов позволяет произвести грубый выбор погрешностей подвода устанавливаемого узла с полезным грузом манипулятором, а при стыковке вручную значительно облегчает работу оператора в скафандре и с малой зоной визуального обзора места стыковки. После грубой юстировки проводится точная стыковка узлов при помощи шаровых упоров и гнезд.
Реализацию устройства стыковки рассмотрим на примере конструкции, представленной на фиг.1-11.
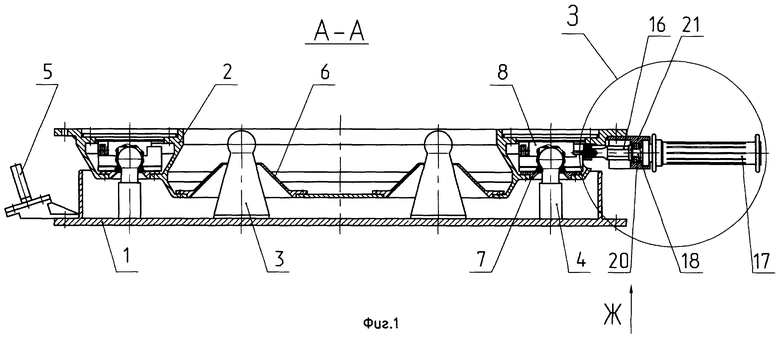
На фиг.1 - сечение состыкованных приемного и устанавливаемого узлов.
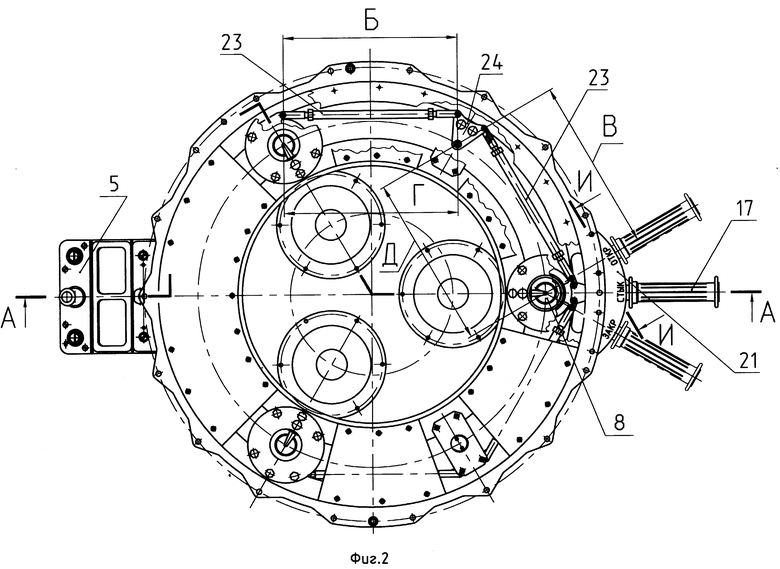
На фиг.2 - вид сверху на устанавливаемый узел.
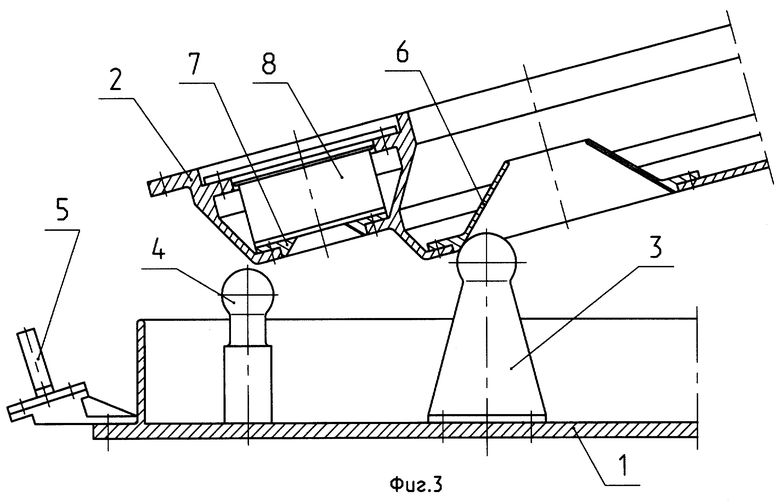
На фиг.3 - положение приемного и устанавливаемого узлов при максимальной погрешности подвода перед началом стыковки.
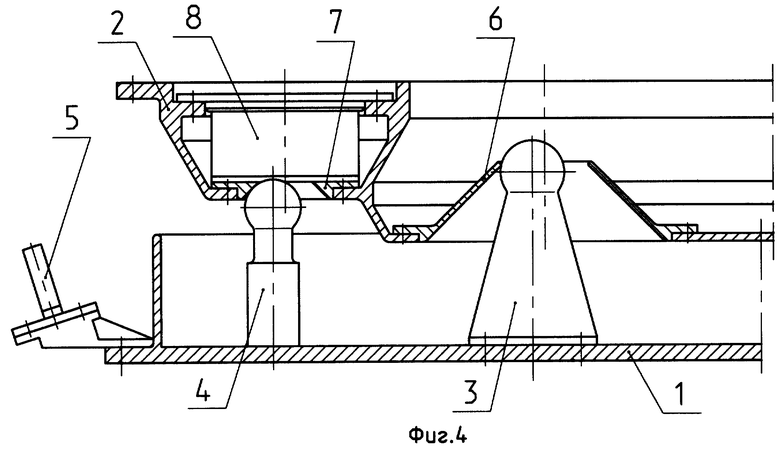
На фиг.4 - положение приемного и устанавливаемого узлов перед началом точной стыковки.
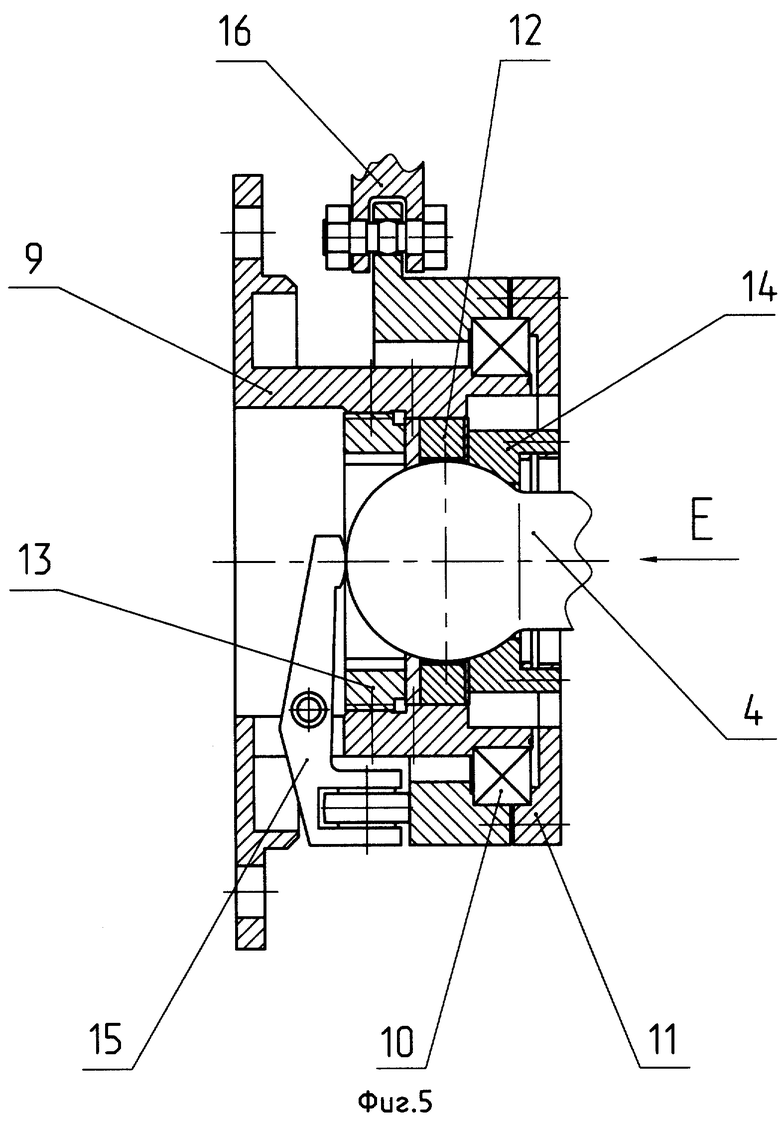
На фиг.5 - продольное сечение замка.
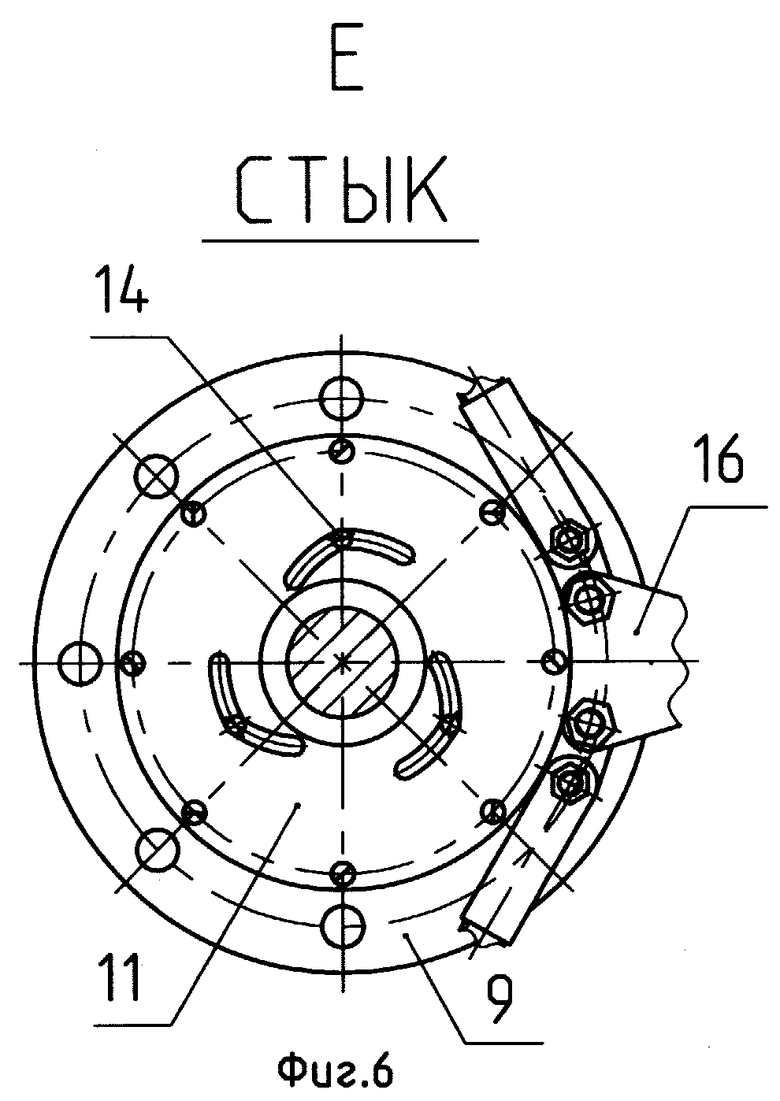
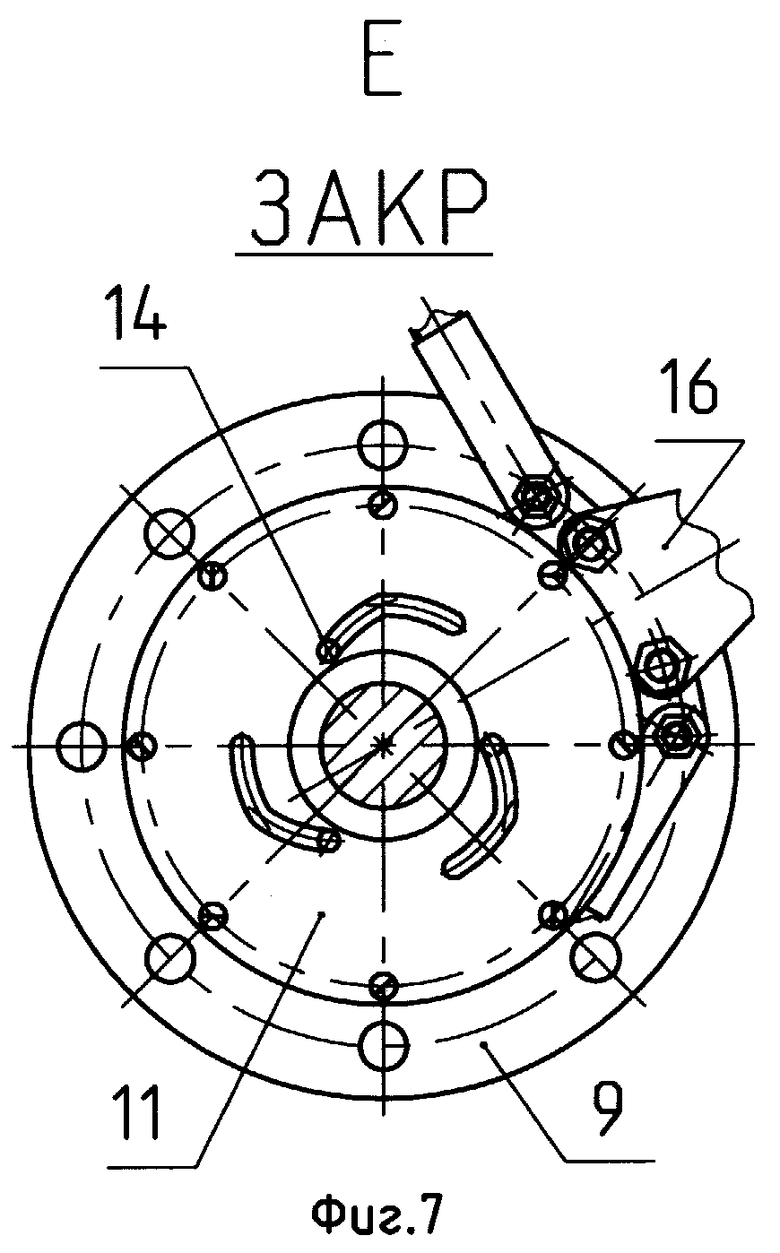
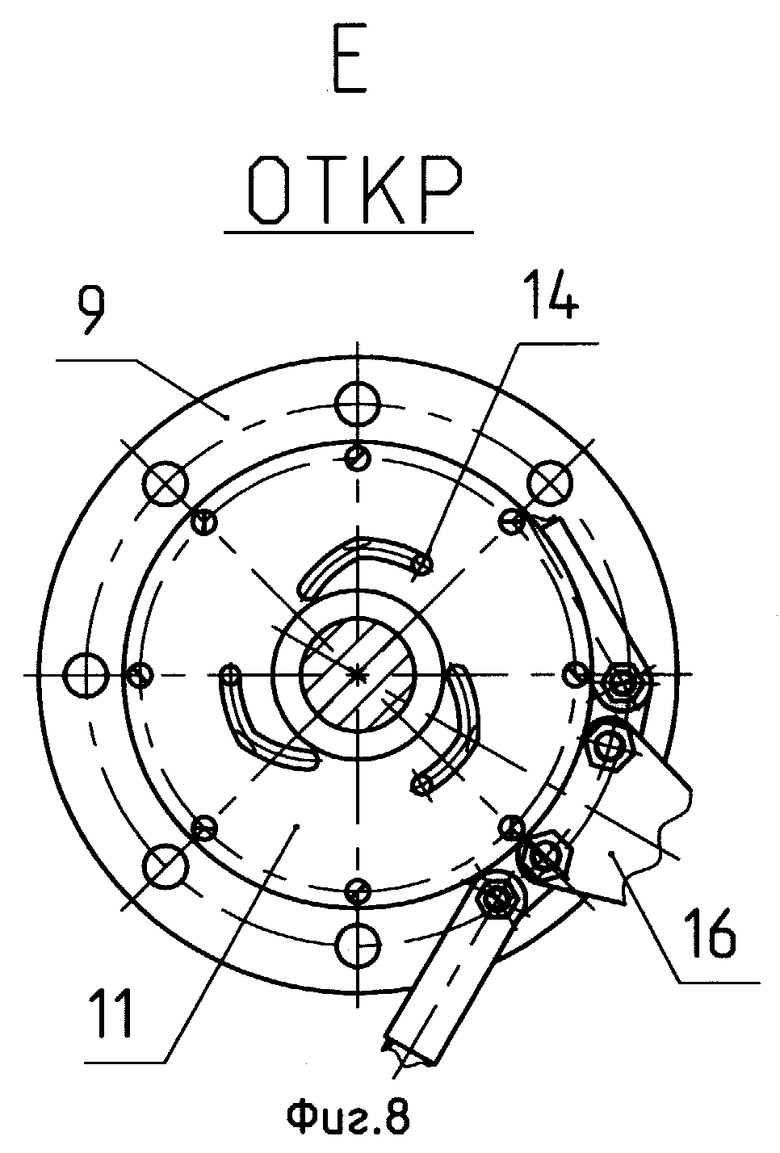
На фиг.6, 7, 8 - вид на замок при положениях “Стык”, “Закр”, “Откр”.
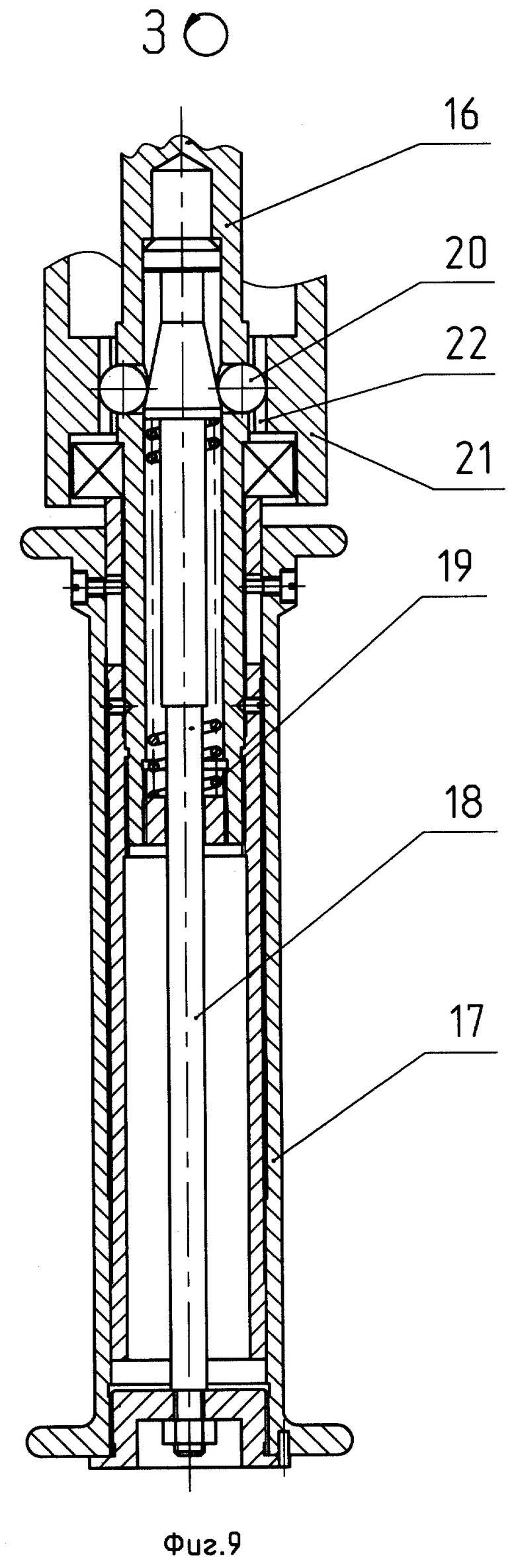
На фиг.9 - продольное сечение рукоятки фиксации.
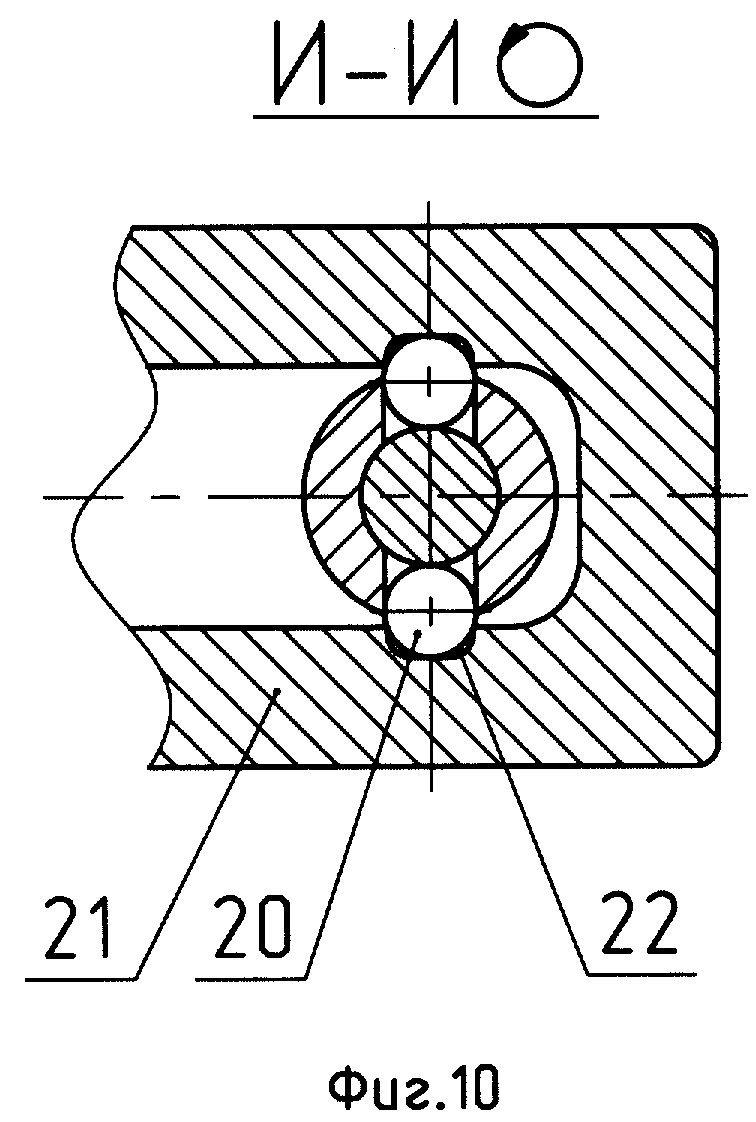
На фиг.10 - сечение по шариковому замку рукоятки фиксации и по накладке.
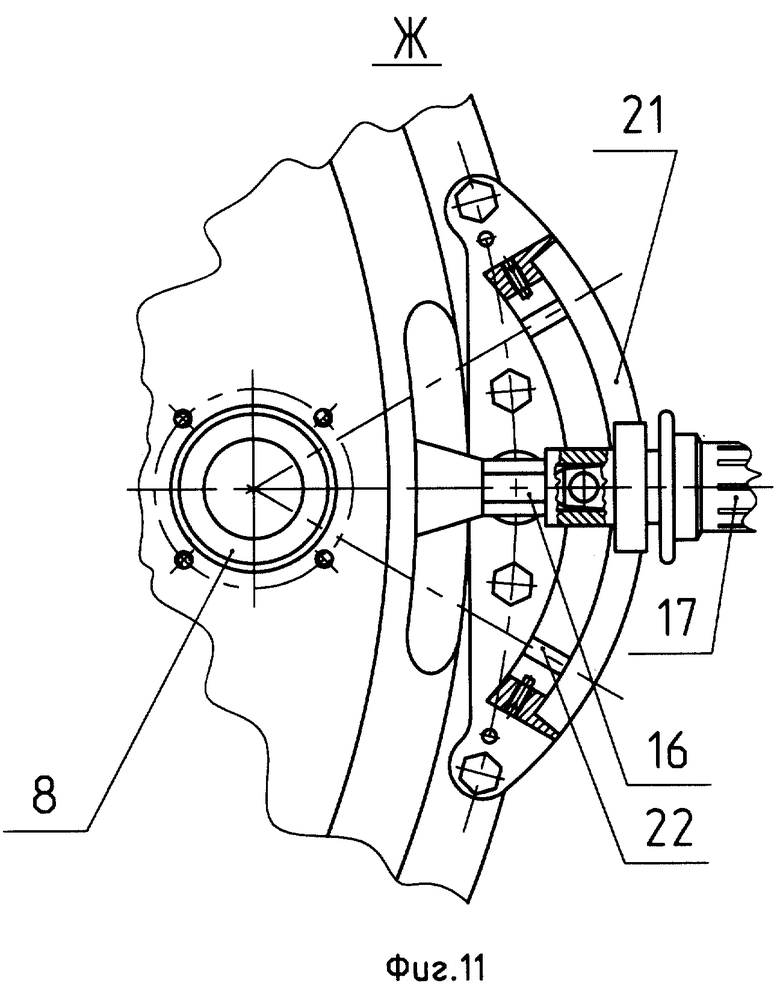
На фиг.11 - вид на накладку и рукоятку фиксации при положении “Стык”.
Устройство стыковки полезного груза содержит приемный узел 1, закрепленный заранее на месте эксплуатации, например на внешней поверхности корпуса космического корабля, и устанавливаемый узел 2 с полезным грузом, подлежащий установке на приемном узле 1.
Приемный узел 1 выполнен в виде полого цилиндра, на днище которого по окружности меньшего диаметра равномерно размещены направляющие штыри 3, а по окружности большего диаметра - шаровые упоры 4, при этом на внешней цилиндрической поверхности приемного узла закреплена мишень 5 для стыковки полезного груза, а устанавливаемый узел 2 выполнен в виде полого цилиндра, на днище которого выполнены под направляющие штыри 3 заходные конусы 6 для грубой юстировки и гнезда 7 под шаровые упоры 4 для точной юстировки, причем внутри корпуса устанавливаемого узла 2 соосно с гнездами 7 закреплены замки 8, каждый из которых выполнен в виде втулки 9, на которой с возможностью вращения относительно оси втулки установлен на подшипнике 10 запорный диск 11, размещенный со стороны шарового упора 4, сухарей 12, которые в рассматриваемой конструкции предлагается выполнить в виде постоянных магнитов, и поджатых гайкой 13 к запорному диску 11 через расположенные внутри втулки 9 перпендикулярно ее оси механические затворы 14, на торцах которых, обращенных к запорному диску 11, выполнены штыри, входящие в направляющие пазы запорного диска 11 и толкателя 15. Запорный диск 11 одного из замков 8 жестко соединен с рукояткой фиксации 16, подвижная гильза 17 которой с закрепленным на ней стержнем 18, пружиной 19 соосна с рукояткой с упором одним концом на рукоятку 16, а другим концом - на стержень 18 и шарики 20, размещенные на рукоятке 16 в отверстиях, перпендикулярных оси рукоятки. Коническая поверхность стержня 18 сопряжена с шариками 20. В накладке 21, жестко соединенной с устанавливаемым узлом 2, выполнены пазы 22, обеспечивающие с шариками 20 и стержнем 18 фиксацию рукоятки 16 в положениях “Откр”, “Стык”, “Закр”.
Рукоятка 16 закреплена на одном из замков 8, а между собой замки соединены тягами 23 через вилки 24. Рукоятка 16 установлена с возможностью вращения относительно оси одного из замков 8, на котором закреплена рукоятка, от положения “Откр” до положения “Закр” через промежуточное положение “Стык”. При любом из положений размеры А и Б в тягах 23 между осями, соединяющими тяги 23 с замками 8 и вилками 24, должны быть соответственно равны размерам В и Г между центровыми осями замков 8 и вилками 24. Соблюдение этих условий позволяет обеспечить равномерное и одновременное срабатывание замков 8 при любых из трех положений рукоятки 16.
Устройство работает следующим образом.
На внешней поверхности или выносной ферме, например, орбитального космического корабля в местах предполагаемой установки доставляемых на орбиту полезных грузов в наземных условиях крепятся приемные узлы 1. Полезный груз закрепляется на устанавливаемом узле 2 и доставляется на орбиту, например, на грузовом космическом аппарате или аппарате типа “Шаттл”. Для обеспечения установки груза узел 2 с полезным грузом доставляется с помощью дистанционно управляемого манипулятора, например, типа ERA или вручную оператором к узлу 1. В процессе сближения и стыковки узлов 1 и 2 рукоятка 16 устанавливаемого узла 2 зафиксирована в положении “Стык”, при этом направляющие пазы на запорном диске 11 каждого из замков 8, взаимодействуя с торцевыми пальцами механических затворов 14, разводят затворы до диаметра, превышающего диаметр стальной магнитопроводящей сферы шарового упора 4 приемного узла 1.
В положении рукоятки 16 “Стык”, “Закр”, “Откр” в накладке 21, жестко соединенной с устанавливаемым узлом 2, выполнены пазы 22, в которые частично западают шарики 20 под воздействием конической поверхности подпружиненного стержня 18. Таким образом рукоятка 16 фиксируется в трех положениях. Для перевода рукоятки 16 в положение “Закр” или “Откр” необходимо оттянуть подвижную гильзу 17 с закрепленным на ней стержнем 18 вдоль оси рукоятки 16 от накладки 21, при этом коническая часть стержня 18 освобождает шарики 20, что позволяет перевести рукоятку 16 из положения “Стык” в положение “Закр” или “Откр”. При снятии усилия оттягивания с рукоятки 16 стержень 18 под воздействием пружины 19 автоматически воздействует конической поверхностью на шарики 20, перемещая их частично в соответствующие пазы 22, и осуществляет фиксацию рукоятки 16 в положениях “Закр” или “Откр”. При перемещении рукоятки 16 в положение “Закр” или “Откр” она через тяги 23 вызывает вращение вилок 24 и, соответственно, поворот запорных дисков 11 замков 8.
При подводе устанавливаемого узла 2 к приемному узлу 1 с допустимыми погрешностями по тангажу, крену и рысканью сфера как минимум одного из направляющих штырей 3 приемного узла 1 касается внутренней конической поверхности одного из заходных конусов 6, выполненных с необходимыми геометрическими размерами для выбора погрешностей, устанавливаемого узла 2, после чего производится расслабление кисти манипулятора, удерживающей устанавливаемый узел 2 с полезным грузом, и под усилием давления вдоль продольной оси приемного узла 1 остальные сферы направляющих штырей 3 касаются соответствующих внутренних конических поверхностей заходных конусов 6 устанавливаемого узла 2, в результате чего происходит выбор погрешностей подвода по крену и тангажу. На дальнейшем этапе стыковки происходит выбор погрешностей подвода по рысканью за счет скольжения сфер направляющих штырей 3 по внутренней конической поверхности заходных конусов 6 и при выходе сфер штырей 3 из зоны контакта с поверхностями конусов 6 происходит контакт сфер шаровых упоров 4 с внутренней конической поверхностью гнезд 7. После точной юстировки по внутренней конической поверхности гнезд 7 сферы шаровых упоров 4 попадают в зону захода внутрь замков 8.
При введении сферы шарового упора 4 внутрь замка 8 магнитные сухари 12 втягивают стальную магнитопроводящую сферу шарового упора 4 в зону максимального магнитного воздействия, и осуществляется предварительный захват сферы. В этом случае, при установке полезного груза в условиях невесомости, не требуется постоянных усилий удержания дистанционно управляемым манипулятором, например, типа ERA или оператором до окончательного закрепления груза. Окончательное закрепление груза осуществляется путем поворота рукоятки фиксации 16 в положение “Закр”, при этом механические затворы 14 под воздействием торцевых пальцев надежно охватывают сферу шарового упора 4, поджимая устанавливаемый узел 2 с полезным грузом к внутренней сферической поверхности втулки 9. Для расфиксации сферы шарового упора 4 необходимо рукоятку 16 перевести в положение “Откр” через промежуточное положение “Стык”, при этом толкатель 15, механически связанный с поворотным запорным диском 11, поворачиваясь вокруг своей оси, выталкивает сферу шарового упора 4 из зоны максимального магнитного воздействия сухарей 12, после чего устанавливаемый узел 2 с полезным грузом с незначительным усилием снимается с приемного узла 1. Расстыковка возможна и при нахождении рукоятки 16 в положении “Стык”, но в этом случае требуется приложение значительно больших усилий для вывода сфер шаровых упоров 4 из зоны магнитного воздействия сухарей 12.
Такая конструкция может быть использована для стыковки полезных грузов, например, к корпусу или выносной ферме орбитального космического корабля без осуществления электрических связей полезного груза с бортом космического корабля или с минимальным количеством этих связей.
Литература
1. Патент США №4955654, 1990.
2. Патент США №5040748, 1991 - прототип.
3. Сыромятников В.С. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТЫКОВКИ ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2010 |
|
RU2424164C1 |
| ПАССИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583992C2 |
| ЭЛЕКТРИЧЕСКИЙ СОЕДИНИТЕЛЬ | 2003 |
|
RU2256267C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ, ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2193995C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167084C1 |
| АКТИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583993C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167085C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167083C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2165381C1 |
| УСТРОЙСТВО СТЫКОВКИ КОСМИЧЕСКИХ МОДУЛЕЙ | 2003 |
|
RU2269462C2 |
Изобретение относится к космической технике и более конкретно к устройствам крепления полезного груза к космическому кораблю в процессе внекорабельной деятельности. Предлагаемое устройство содержит приемный и устанавливаемый узлы, замки и рычажные механизмы. При этом приемный узел выполнен в виде полого цилиндра, на днище которого по окружности меньшего диаметра равномерно размещены направляющие штыри, а по окружности большего диаметра - шаровые упоры. На внешней поверхности приемного узла закреплена мишень для стыковки полезного груза. Устанавливаемый узел снабжен рукояткой фиксации и выполнен в виде корпуса с полым цилиндром, имеющим на днище заходные конусы под направляющие штыри для грубой юстировки и гнезда под шаровые упоры для точной юстировки. Внутри корпуса устанавливаемого узла соосно c гнездами закреплены замки, механически связанные каждый с рукояткой фиксации через рычажный механизм. Замки выполнены в виде втулок, на которых со стороны соответствующих шаровых упоров на подшипниках вращения установлены запорные диски. Для фиксации шаровых упоров на запорных дисках предусмотрены (магнитные) сухари. Технический результат изобретения состоит в создании механизма автономного устройства многоразовой стыковки, управляемого одним или двумя операторами с помощью манипулятора или вручную, который может также питаться от бортовой энергосети корабля. 11 ил.
Устройство стыковки преимущественно к корпусу находящегося на орбите космического корабля, содержащее приемный узел, устанавливаемый узел с полезным грузом, n замков и рычажные механизмы, отличающееся тем, что приемный узел выполнен в виде полого цилиндра, на днище которого по окружности меньшего диаметра равномерно размещены направляющие штыри, а по окружности большего диаметра - шаровые упоры, при этом на внешней цилиндрической поверхности приемного узла закреплена мишень для стыковки полезного груза, а устанавливаемый узел снабжен рукояткой фиксации и выполнен в виде корпуса с полым цилиндром, имеющим на днище заходные конусы под направляющие штыри для грубой юстировки и гнезда под шаровые упоры для точной юстировки, причем внутри корпуса устанавливаемого узла соосно гнездам закреплены замки, механически связанные с рукояткой фиксации, при этом каждый из, по крайней мере, n-1 замков связан с указанной рукояткой через указанный рычажный механизм, а каждый из замков выполнен в виде втулки, на которой с возможностью вращения относительно ее оси установлен на подшипниках запорный диск с направляющими пазами, размещенный со стороны соответствующего шарового упора, сухарей, поджатых гайкой к запорному диску через расположенные внутри втулки перпендикулярно ее оси механические затворы, на торцах которых, обращенных к запорному диску, выполнены штыри, входящие в направляющие пазы запорного диска.
| US 5040748 А, 20.08.1991 | |||
| US 4955654 А, 11.09.1990 | |||
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167083C1 |
| СЫРОМЯТНИКОВ B.C | |||
| Стыковочные устройства космических аппаратов | |||
| - М.: Машиностроение, 1984. | |||

