Изобретение относится к космической технике и более конкретно к устройствам крепления полезного груза (приборов, научной аппаратуры, сменных узлов и т.п.), устанавливаемого с помощью манипулятора в процессе внекорабельной деятельности на внешней поверхности космического корабля.
В настоящее время перемещение полезного груза, его механическое закрепление и стыковка кабельной сети к грузу производится космонавтом вручную с большими физическими и временными затратами. С целью уменьшения этих затрат предусматривается использование манипулятора с созданием на поверхности космического объекта устройств, обеспечивающих механический и электрический интерфейсы с помощью манипулятора под управлением космонавта без его выхода на поверхность объекта.
Известна кисть манипулятора (см. патент США №4955654, 1990 [1]) в системе дистанционного управления для захвата объекта, включающая средства захвата объекта со средствами центровки, средства контроля момента, прилагаемого к средствам центровки, средства управления выходным сигналом привода.
Однако указанное средство не позволяет в автоматическом режиме, например при помощи манипулятора, стыковать полезные грузы, закрепленные на устанавливаемом узле, с приемным узлом или использовать его для закрепления одного из оконечных узлов манипулятора в процессе перемещения («шагания») манипулятора по поверхности космического объекта.
Наиболее близким по технической сущности к заявляемому изобретению прототипом является устройство фиксации полезного груза (см. патент RU 2193995 [2]), содержащее приемный и устанавливаемый узлы, замки и рычажные механизмы. При этом приемный узел выполнен в виде полого цилиндра, на днище которого по окружности меньшего диаметра равномерно размещены направляющие элементы (штыри), а по окружности большего диаметра - шаровые упоры. На внешней поверхности приемного узла закреплена мишень для стыковки полезного груза. Устанавливаемый узел снабжен рукояткой фиксации и выполнен в виде корпуса с полым цилиндром, имеющим на днище заходные конусы под направляющие штыри для грубой юстировки и гнезда под шаровые упоры для точной юстировки.
Недостатком известного устройства является необходимость ручной работы оператора в условиях открытого космоса при каждой операции с переустановкой полезного груза, особенно для обеспечении электрических связей с полезным грузом при стыковке-расстыковке электросоединителей.
Техническим результатом, достигаемым с помощью заявляемого изобретения, является автоматическая стыковка механического и электрического интерфейсов (без использования ручного труда) между полезным грузом, например солнечной батареи или научной аппаратуры, с корпусом или выносной фермой космического корабля.
Технический результат достигается тем, что в пассивном устройстве фиксации полезного груза преимущественно к корпусу находящегося на орбите космического корабля, содержащем корпус в виде полого цилиндра, на днище которого по окружности равномерно размещены направляющие элементы, взаимодействующие с приемными узлами устанавливаемого полезного груза, а также мишень на внешней его поверхности корпуса, в отличие от известного в него введено кольцо на переднем фланце корпуса и на кольце выполнены профилированные направляющие выступы, а также расположены датчики контроля закрытия стыка, внутри корпуса установлен диск, на внешней поверхности которого размещены розетки электросоединителей, датчики положения диска и соосно с корпусом приемный узел, выполненный в виде стакана с цилиндрическим отверстием, диаметр которого соответствует диаметру головки взаимодействующего механизма, а цилиндрическое отверстие заканчивается коническими расточками на внешней и внутренней поверхностях приемного узла, при этом диск связан с узлом возврата диска в исходное положение, выполненным в виде штока, установленного на внешней стороне диска, и пружин сжатия, размещенных во втулке и опирающихся одним концом на хвостовик штока, а другим концом - в дно втулки, которая прикреплена к основанию корпуса.
При этом направляющие выступы позволяют произвести выбор погрешностей подвода устанавливаемого манипулятором полезным грузом как по тангажу и рысканию, так и по крену, а наличие датчиков стыка обеспечить точное совмещение плоскостей стыка двух взаимодействующих устройств для последующего процесса соединения-разъединения элементов электросоединителей пассивного и активного устройств фиксации приводом манипулятора.
Заявляемое устройство фиксации является пассивным, т.к. не имеет собственного привода.
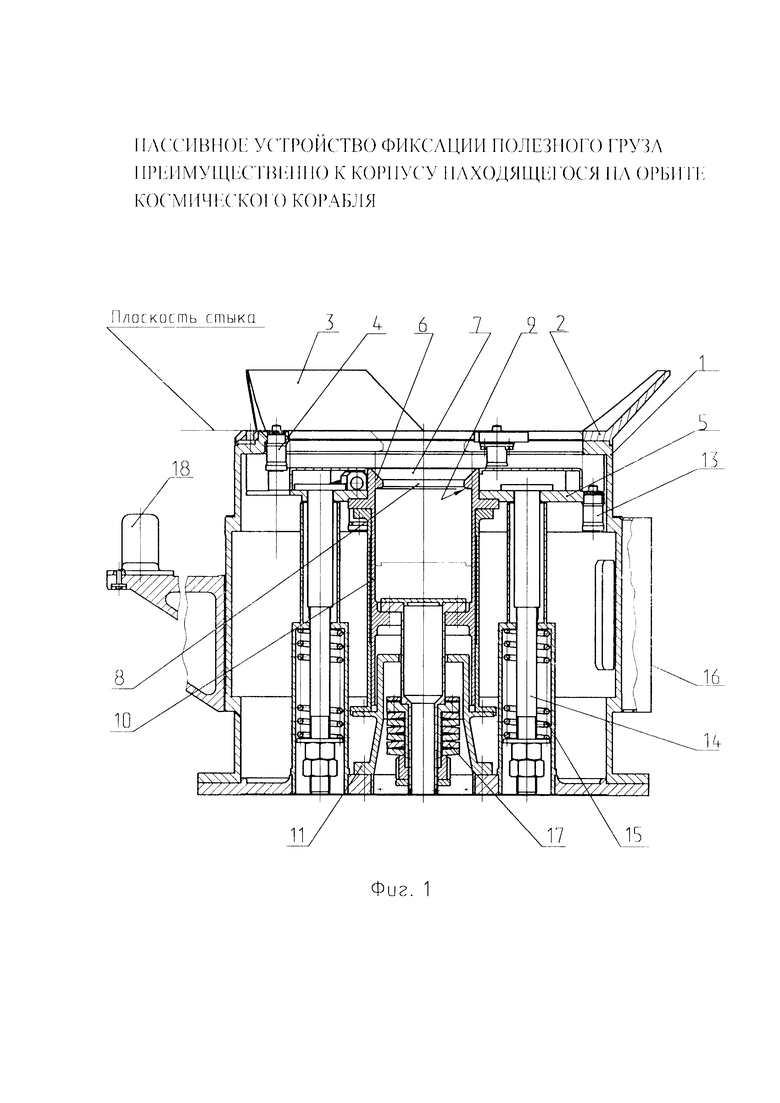
Реализацию устройства рассмотрим на примере конструкции, представленной на фиг. 1-2.
Предлагаемое устройство содержит корпус 1, закрепленный заранее на внешней поверхности космического корабля, с кольцом 2, имеющим направляющие профилированные выступы 3. На кольце имеются датчики касания 4 плоскости стыка устройства с плоскостью стыка взаимодействующего активного устройства.
Внутри корпуса установлен диск 5, на верхней поверхности которого соосно с корпусом установлен приемный узел 6, выполненный в виде приемного гнезда с коническим заходом 7, переходящим в цилиндрическую поверхность 8, диаметр которой соответствует диаметру активного взаимодействующего устройства, далее цилиндрическая поверхность переходит во внутреннюю коническую поверхность 9, образуя, таким образом, конический упор для элементов конструкции активного взаимодействующего устройства, используемый при создании жесткого механического интерфейса (Фиг. 1).
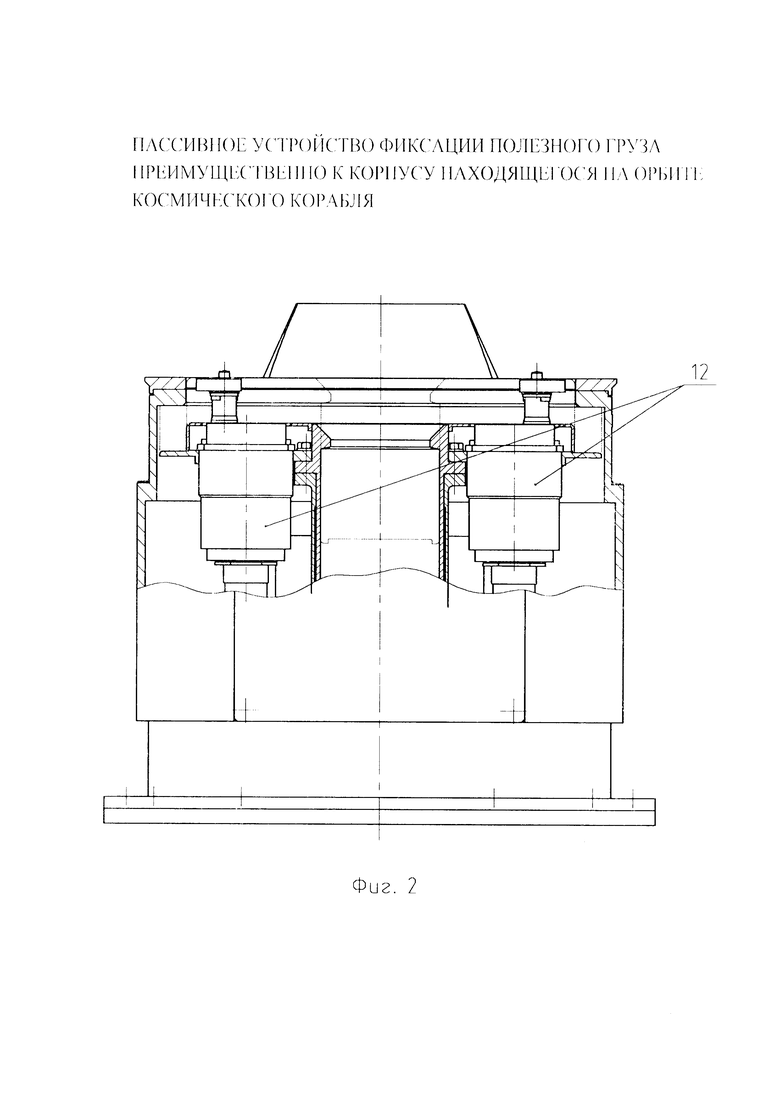
Приемный узел 6 в нижней своей части заканчивается стаканом 10, имеющим возможность перемещаться в направляющем узле 11, закрепленном в нижней части корпуса 1, что обеспечивает перемещения диска 5 вверх-вниз. На верхней поверхности диска установлены части электросоединителей 12 (Фиг. 2), датчики положения диска 13 и блока пружин, состоящего из прикрепленного к диску 5 штока 14, подпружиненного пружиной сжатия 15, которая размещена во втулке, закрепленной к основанию корпуса 1.
В исходном положении под действием блока пружин диск находится в нижнем положении относительно корпуса.
Электрические связи с электросоединителей 12 для подключения к бортовой сети выведены на плату электросоединителей 16, расположенную на внешней поверхности корпуса.
Для обеспечения гарантированного усилия затяжки настоящего устройства с взаимодействующим устройством в нижней части платформы установлен узел обеспечения силы затяжки стыка в виде тарельчатых пружин 17 с возможностью регулировки усилия затяжки.
На корпусе 1 установлена мишень 18 для наведения манипулятора с активным устройством фиксации на пассивное устройство фиксации.
Пассивное устройство фиксации работает следующим образом.
При вводе в отверстие приемного узла взаимодействующего выдвинутого механизма активного устройства фиксации происходит предварительная сцепка указанного выше механизма с внутренним конусом приемного узла при помощи защелок активного механизма.
После включения активного механизма на его втягивание начинается выравнивание стыковочных плоскостей устройства фиксации и взаимодействующего механизма с одновременной ориентацией их относительно вертикальной оси за счет профилированных направляющих выступов на силовом кольце обоих устройств.
Окончание взаимной ориентации и плоскостей стыков контролируется датчиками касания стыка.
После выравнивания взаимного положения плоскостей стыка пассивного и активного устройств фиксации за счет привода втягивания активного взаимодействующего устройства приходит в движение диск с розетками электросоединителей вверх, при этом блоки пружин сжимаются.
Окончание процесса (стыковка электросоединителей) контролируется датчиками положения диска и соответствующими контрольными контактами электросоединителей.
Для компенсации неточностей при изготовлении и регулировки в пассивном устройстве фиксации имеется узел в виде блока тарельчатых пружин, одновременно обеспечивающий заданную величину усилия затяжки.
Освобождение диска происходит при обратном движении взаимодействующего механизма, при этом за счет энергии блока сжатых пружин происходит расстыковка элементов электросоединителей взаимодействующего механизма и устройства фиксации пассивного.
Литература
1. Патент США №4955654, 1990.
2. Патент RU 2193995 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583993C2 |
| УСТРОЙСТВО СТЫКОВКИ ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2002 |
|
RU2226483C1 |
| УСТРОЙСТВО СТЫКОВКИ ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2010 |
|
RU2424164C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ, ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2193995C2 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ТУРИСТОВ С ОКОЛОЛУННОЙ ОРБИТЫ НА ПОВЕРХНОСТЬ ЛУНЫ И ПОСЛЕДУЮЩЕГО ВОЗВРАЩЕНИЯ НА ЗЕМЛЮ | 2019 |
|
RU2730700C1 |
| АГРЕГАТ СТЫКОВОЧНЫЙ ПАССИВНЫЙ | 2007 |
|
RU2349517C1 |
| АНДРОГИННОЕ СТЫКОВОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКИХ КОРАБЛЕЙ | 2005 |
|
RU2291821C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| КОСМИЧЕСКИЙ АППАРАТ | 1992 |
|
RU2072951C1 |
Изобретение относится к стыковочным средствам и инструментам внекорабельной деятельности. Устройство содержит корпус (1), закрепленный на внешней поверхности космического корабля, с кольцом (2), имеющим направляющие выступы (3) и датчики касания (4) с взаимодействующим активным устройством (АУ). В корпусе установлен диск (5) с приемным узлом (6). Диаметр его цилиндрической части (8) соответствует диаметру АУ. Внутренняя коническая поверхность (9) образует упор для элементов АУ при создании жесткого механического интерфейса. Перемещения диска (5) вверх-вниз обеспечиваются стаканом (10) в направляющем узле (11). На диске (5) установлены части электросоединителей, датчики (13) положения диска и штоки (14) блока пружин (15). Под действием этих пружин диск (5) находится в нижнем исходном положении. Тарельчатые пружины (17) обеспечивают усилие стяжки пассивного устройства с АУ. Мишень (18) служит для наведения манипулятора с АУ. Техническим результатом изобретения является автоматическая (без использования ручных операций) электромеханическая стыковка полезного груза с элементами космического корабля. 2 ил. 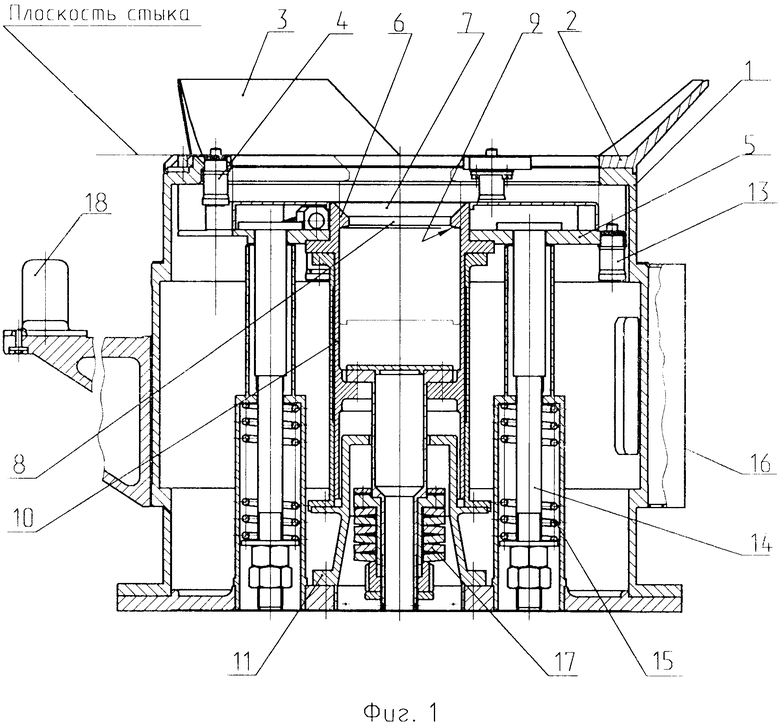
Пассивное устройство фиксации полезного груза преимущественно к корпусу находящегося на орбите космического корабля, содержащее корпус, выполненный в виде полого цилиндра, на днище которого по окружности равномерно размещены направляющие элементы, взаимодействующие с приемными узлами устанавливаемого полезного груза, а также мишень на внешней поверхности корпуса устройства, отличающееся тем, что в него введено кольцо на переднем фланце корпуса устройства и на кольце выполнены профилированные направляющие выступы, а также расположены датчики контроля закрытия стыка, внутри корпуса установлен диск, на внешней поверхности которого размещены розетки электросоединителей, датчики положения диска и, соосно с корпусом, приемный узел, выполненный в виде стакана с цилиндрическим отверстием, диаметр которого соответствует диаметру головки взаимодействующего механизма, а цилиндрическое отверстие заканчивается коническими расточками на внешней и внутренней поверхностях приемного узла, при этом диск связан с узлом возврата диска в исходное положение, выполненным в виде штока, установленного на внешней стороне диска, и пружин сжатия, размещенных во втулке и опирающихся одним концом на хвостовик штока, а другим концом - в дно втулки, которая прикреплена к основанию корпуса устройства.
| УСТРОЙСТВО КРЕПЛЕНИЯ, ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2193995C2 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2165381C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО ОБЪЕКТА | 1999 |
|
RU2151086C1 |
| US 4955654 А, 11.09.1990 | |||
| US 5040748 А, 20.08.1991 | |||
| US 4177964 А, 11.12.1979. | |||

