Предлагаемые технические решения относятся к области радиолокации и могут быть использованы для измерения угловых координат объектов.
Известен способ измерения угловых координат объекта в процессе обзора пространства радиолокационной станцией (РЛС), включающий излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание амплитуд A(εi, βj) обнаруженных сигналов и соответствующих им угловых координат луча (εi, βj), формирование двумерного углового пакета обнаруженных сигналов, определение угловых координат объекта (εo, βo) (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов. - М.: Военное издательство Министерства обороны СССР, 1968, с.109).
Известна радиолокационная станция, реализующая указанный способ измерения координат объекта (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов. - М.: Военное издательство Министерства обороны СССР, 1968, с.110, рис.4.23).
Известная радиолокационная станция содержит последовательно соединенные антенну, радиоприемное устройство, устройство обнаружения сигнала, включающее пороговое устройство и вычислитель, а также датчик текущей угловой координаты, вход которого соединен с координатным выходом антенны, а выход - со входом вычислителя.
Поясним понятие «двумерный угловой пакет обнаруженных сигналов».
В процессе обзора пространства радиолокационной станцией сигналы, отраженные от объекта и принятые приемником, сравниваются с порогом обнаружения. В результате, для каждой дискреты дальности, в каждом положении луча антенны в плоскости угол места (ε) - азимут (β) на выходе порогового устройства присутствует сигнал, если он превышает уровень порога, сигнал на выходе порогового устройства отсутствует (пропуск обнаружения сигнала), если принятый сигнал ниже уровня порога. Обнаруженные сигналы образуют двумерный угловой пакет, если в какой либо области зоны обзора в плоскости ε-β нет положений луча с пропусками сигналов (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974, с.30, рис.1.7). На фиг.1 приведены примеры двумерных угловых пакетов обнаруженных сигналов, отличающиеся размерами (количеством положений луча в пакете) и конфигурацией (расположением направлений луча в пакете). Положения луча при обзоре пространства, в которых произошло обнаружение, показаны серым цветом, в положениях луча, обозначенных белым цветом, обнаружения нет. Изображено три вида двумерных угловых пакетов обнаруженных сигналов: из одного положения луча (единичный пакет), из двух и из четырех положений луча.
В известном способе измерения угловых координат объекта и устройстве, реализующем данный способ, за измеренную угловую координату объекта θ0 (где θ0=ε0 или θ0=β0) берут среднее арифметическое двух отсчетов - начала θH (где θH=εH или θH=βH) и конца θK (где θK=εK или θK=βK) углового пакета сигналов по измеряемой координате:
Недостатком известных способа и устройства является низкая точность измерения угловых координат. Это связано с тем, что в них не учитывается неравномерность уровней сигналов в угловом пакете обнаруженных сигналов.
Наиболее близким способом измерения угловых координат объекта в процессе осмотра пространства радиолокационной станцией является способ, включающий излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание амплитуд обнаруженных сигналов и соответствующих им угловых координат луча, формирование двумерного углового пакета обнаруженных сигналов, предварительное определение угловых координат объекта (εo, βo) c известной погрешностью. При этом измеряемая угловая координата объекта θ0 (θ0=ε0 или θ0=β0) оценивается исходя из расчета максимума функции правдоподобия в соответствии с известной формулой (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов. - М.: Военное издательство Министерства обороны СССР, 1968, с.254-258):

где k - номер углового положения луча в сформированном угловом пакете обнаруженных сигналов по угловой координате θ;
n - количество положений луча в угловом пакете обнаруженных сигналов по угловой координате θ;
 - весовой коэффициент, равный отношению сигнал/шум по мощности для k-го (k=1, …, n) сигнала углового пакета обнаруженных сигналов;
- весовой коэффициент, равный отношению сигнал/шум по мощности для k-го (k=1, …, n) сигнала углового пакета обнаруженных сигналов;
Qk=Q(θ-θk) - нормированная к своему максимуму диаграмма направленности антенны (ДНА) в направлении на объект в положении луча, соответствующем k-му сигналу углового пакета обнаруженных сигналов, θk=εi или θk=βj;
 - производная от нормированной к своему максимуму ДНА Qk по угловой координате θ;
- производная от нормированной к своему максимуму ДНА Qk по угловой координате θ;
θk - угловая координата луча, соответствующего k-му сигналу углового пакета обнаруженных сигналов, θk=θл+(k-1)Δθ;
θл - угловая координата луча, соответствующего первому (k=1) сигналу углового пакета обнаруженных сигналов;
Δθ - шаг перемещения луча при обзоре по угловой координате θ;
Ak - амплитуда k-го сигнала пакета обнаруженных сигналов, нормированная к среднеквадратическому значению шумов приемника РЛС.
При определении угловой координаты объекта θ0 равенство (2) проверяется для множества различных возможных положений объекта по угловой координате θ. Значение угловой координаты θ в момент выполнения условия (2) принимается за измеренную угловую координату объекта θ0.
Наиболее близкой к заявляемой является РЛС (фиг.2), содержащая передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат объекта 7, первый и второй выходы синхронизатора 6 соединены с синхровходами передатчика 1 и блока оценки угловых координат объекта 7 соответственно, при этом блок оценки угловых координат объекта 7 включает запоминающее устройство обнаруженных сигналов 8, блок формирования угловых пакетов 9 и вычислитель 10, причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловых координат объекта 7 соответственно, М выходов запоминающего устройства обнаруженных сигналов 8 соединены с М входами блока формирования угловых пакетов 9, М выходов которого соединены с М входами вычислителя 10, выход вычислителя 10 является выходом блока оценки угловых координат объекта 7 (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970, с.221).
Работа наиболее близкой к заявляемой РЛС при измерении угловых координат объекта происходит следующим образом. В передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3, поступают в приемник 4, где усиливаются. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные таким образом сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат объекта 7. Значения амплитуд обнаруженных сигналов с соответствующими угловыми координатами луча по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок формирования угловых пакетов 9, где происходит формирование углового пакета обнаруженных сигналов в соответствии с ранее описанным порядком (сигналы образуют угловой пакет, если в плоскости ε-β нет положений луча с пропусками сигналов). Координаты положений луча и соответствующие им амплитуды сигналов, образующих пакет, поступают на М входов вычислителя 10. В вычислителе 10 в соответствии с формулой (2) определяются угловые координаты объекта.
Недостатком наиболее близких технических решений является уменьшение точности определения угловых координат объекта при ограниченном времени оценки угловых координат. Этот недостаток делает затруднительным их использование, в частности в мобильных обзорных РЛС, в которых время, выделяемое на оценку угловых координат объекта, весьма невелико.
Заявляемое изобретение направлено на устранение указанных недостатков.
Решаемой задачей (техническим результатом), таким образом, является повышение точности измерения угловых координат объекта при ограниченном времени оценки угловых координат.
Указанный технический результат достигается тем, что в способе измерения угловых координат объекта в процессе осмотра пространства радиолокационной станцией, включающем излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание амплитуд обнаруженных сигналов и соответствующих им угловых координат луча, формирование двумерного углового пакета обнаруженных сигналов, предварительное определение угловых координат объекта (εo, βo) с известной погрешностью, согласно изобретению после предварительного определения угловых координат объекта (εo, βo) проводят их уточнение, для чего сформированный двумерный угловой пакет обнаруженных сигналов сравнивают по принятому критерию с эталонными двумерными угловыми пакетами сигналов, заранее рассчитанными для того же вида обзора при различных угловых положениях объекта, задаваемых в окрестности предварительно определенных угловых координат объекта (εo, βo), при этом границы упомянутой окрестности определяются известной погрешностью предварительного определения угловых координат объекта (εo, βo), и по результатам сравнения по принятому критерию выбирают эталонный двумерный угловой пакет сигналов, наиболее близкий к сформированному двумерному угловому пакету обнаруженных сигналов, после чего угловые координаты объекта (εЭ0, βЭ0), соответствующие выбранному эталонному двумерному угловому пакету сигналов, используют в качестве поправок к предварительно определенным угловым координатам объекта (εo, βo), при этом уточненные угловые координаты объекта (εT0, βT0) вычисляют по формуле

Технический результат достигается также тем, что в качестве критерия, в соответствии с которым выбирают эталонный двумерный угловой пакет сигналов, принимают сумму квадратов отклонений модулей амплитуд сигналов в сформированном угловом пакете, нормированных к сумме модулей амплитуд сигналов, входящих в этот пакет, от нормированных модулей амплитуд сигналов в эталонном угловом пакете, нормированных к сумме модулей амплитуд сигналов, входящих в этот пакет, при этом поправки угловых координат объекта определяют при наименьшей указанной сумме квадратов отклонений из следующей формулы

где (εK, βL) - угловые координаты объекта по углу места и азимуту соответственно в эталонном пакете обнаруженных сигналов в пределах границ погрешности определения угловых координат объекта;
i, j - номер углового положения луча в сформированном двумерном угловом пакете обнаруженных сигналов по углу места и азимуту соответственно;
M, N - количество угловых положений луча в двумерном угловом пакете по углу места и азимуту соответственно;
(εo, βo) - измеренные угловые координаты объекта по углу места и азимуту соответственно;
(εi, βj) - угловые координаты луча в сформированном двумерном угловом пакете обнаруженных сигналов по углу места и азимуту соответственно при обзоре;
А(εi-εo, βj-βo) - измеренная амплитуда сигнала в сформированном двумерном угловом пакете обнаруженных сигналов в направлении луча с координатами (εi, βj) при положении объекта в точке с координатами (εo, βo);
AЭ(εi-εK, βj-βL) - амплитуда сигнала в эталонном двумерном угловом пакете сигналов в направлении луча с координатами (εi, βj) при положении объекта в точке с координатами (εK, βL).
Технический результат достигается также тем, что в радиолокационной станции, содержащей передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловых координат объекта, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат объекта, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока оценки угловых координат объекта соответственно, при этом блок оценки угловых координат объекта включает запоминающее устройство обнаруженных сигналов, блок формирования угловых пакетов и вычислитель, причем первый и второй входы запоминающего устройства обнаруженных сигналов являются первым и вторым входами блока оценки угловых координат соответственно, М выходов запоминающего устройства обнаруженных сигналов соединены с М входами блока формирования угловых пакетов, М выходов которого соединены с М входами вычислителя, согласно изобретению в блок оценки угловых координат объекта введены запоминающее устройство эталонных пакетов и блок сравнения, причем первая группа из М входов блока сравнения соединена с М выходами блока формирования угловых пакетов, вторая группа из М входов блока сравнения соединена с М выходами запоминающего устройства эталонных пакетов, выход вычислителя соединен с 2×M+1-м входом блока сравнения, выход блока сравнения является выходом РЛС.
Суть заявляемых технических решений состоит в следующем.
Как уже отмечалось, в мобильных обзорных РЛС время, выделяемое на оценку угловых координат объекта, весьма невелико, поэтому известные оптимальные способы определения угловых координат объекта не могут быть использованы в полной мере. Так, например, работа наиболее близкого способа определения угловых координат объекта, основанного на расчете максимума функции правдоподобия (2) и требующего в связи с этим большого объема вычислений, в процессе работы РЛС, как правило, ограничивается во времени. В результате, указанный способ не достигает своей максимальной точности определения угловых координат объекта и поэтому угловые координаты объекта определяются весьма грубо.
В заявляемых технических решениях производится уточнение угловых координат объекта, предварительно определенных каким-либо известным (например, наиболее близким) способом.
Заявляемый способ основан на следующем:
во-первых, применяются эталонные двумерные угловые пакеты сигналов, параметры которых (амплитуды сигналов в ближайших к объекту положениях луча) заранее вычислены для различных заданных угловых положений объекта;
во-вторых, сравнение сформированного по объекту двумерного углового пакета обнаруженных сигналов с эталонными двумерными угловыми пакетами сигналов производится не в пределах границ всего двумерного углового пакета, а только в окрестности предварительно определенного (с помощью, например, наиболее близкого способа) местоположения объекта, при этом границы упомянутой окрестности определяются погрешностями предварительного определения угловых координат объекта (фиг.3), которые для любого способа измерения координат всегда заранее известны.
После предварительного определения угловых координат объекта (εo, βо) осуществляется сравнение параметров сформированного по объекту двумерного углового пакета обнаруженных сигналов с эталонными двумерными пакетами сигналов, заранее рассчитанными для того же вида обзора при различных угловых положениях объекта, задаваемых в упомянутой окрестности предварительно определенных угловых координат объекта. При этом сравниваются амплитуды сигналов пакетов в соответствующих положениях луча.
Поскольку обзор пространства в РЛС проводится с постоянным шагом по азимуту и углу места, то параметры эталонных угловых пакетов достаточно рассчитать для наименьшей повторяющейся части зоны обзора (штрихованная область на фиг.3).
В результате сравнения по принятому критерию (4) осуществляется выбор эталонного углового пакета, наиболее близкого к реально сформированному по объекту угловому пакету обнаруженных сигналов. Координаты объекта, соответствующие выбранному эталонному угловому пакету (εЭ0, βЭ0), затем используются для уточнения предварительно определенных координат объекта (εo, βo).
В качестве критерия, в соответствии с которым выбирают эталонный двумерный угловой пакет сигналов из множества эталонных двумерных угловых пакетов сигналов, заранее рассчитанных для того же вида обзора при различных угловых положениях объекта, принимают сумму квадратов отклонений модулей амплитуд сигналов в сформированном по объекту угловом пакете, нормированных к сумме модулей амплитуд сигналов, входящих в этот пакет, от нормированных модулей амплитуд сигналов в эталонном угловом пакете, нормированных к сумме модулей амплитуд сигналов, входящих в этот эталонный пакет. При этом поправки угловых координат объекта определяют при наименьшей указанной сумме квадратов отклонений. Могут применяться и другие критерии, например вышеописанный критерий, в котором вместо модуля амплитуды сигнала используется квадрат амплитуды сигнала.
Поскольку угловые координаты объекта, соответствующие эталонному угловому пакету (εЭ0, βЭ0), заданы относительно предварительно определенной точки с угловыми координатами, равными грубым значениям угловых координат объекта (εo, βo), то они являются поправками к координатам (εo, βо), и уточненные угловые координаты объекта (εT0, βT0) вычисляются как алгебраическая сумма угловых координат (εo, βо) и поправок к ним (εЭ0, βЭ0) в соответствии с формулой (3).
Таким образом достигается заявляемый технический результат - повышение точности измерения угловых координат объекта при ограниченном времени оценки угловых координат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - примеры двумерных угловых пакетов обнаруженных сигналов.
Фиг.2 - блок-схема наиболее близкой РЛС.
Фиг.3 - сечения луча РЛС в процессе обзора пространства; серым цветом обозначены положения луча, образующие двумерный угловой пакет обнаруженных сигналов, светлым кружком обозначено предварительно определенное угловое местоположение объекта, штриховой линией обозначены границы области (определяемые погрешностью предварительного определения угловых координат объекта), в пределах которых производится сравнение сформированного по объекту двумерного углового пакета обнаруженных сигналов с эталонным двумерным пакетом сигналов, светлым кружком обозначено уточненное угловое местоположение объекта. Заштрихованный прямоугольник - наименьшая повторяющаяся часть зоны обзора.
Фиг.4 - блок-схема заявляемой РЛС.
Заявляемый способ измерения угловых координат объекта реализуется с помощью радиолокационной станции, которая содержит (фиг.4) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат объекта 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат объекта 7, каждый из двух выходов синхронизатора 6 соединен с синхровходами передатчика 1 и блока оценки угловых координат объекта 7, при этом блок оценки угловых координат объекта 7 включает запоминающее устройство обнаруженных сигналов 8, блок формирования угловых пакетов 9, вычислитель 10, запоминающее устройство эталонных пакетов 11, блок сравнения 12, причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловых координат объекта 7 соответственно, М выходов запоминающего устройства обнаруженных сигналов 8 соединены с М входами блока формирования угловых пакетов 9, М выходов блока формирования угловых пакетов 9 соединены с М входами вычислителя 10 и с первой группой из М входов блока сравнения 12, вторая группа из М входов блока сравнения 12 соединена с М выходами запоминающего устройства эталонных пакетов 11, выход вычислителя 10 соединен с 2×М+1-м входом блока сравнения 12, выход блока сравнения 12 является выходом РЛС.
Количество выходов запоминающего устройства обнаруженных сигналов 8, входов и выходов блока обнаружения угловых пакетов 9, входов вычислителя 10, выходов запоминающего устройства эталонных пакетов 11, а также количество входов в первой и второй группах входов блока сравнения 2 (значение М) определяется наибольшей возможной величиной двумерного углового пакета обнаруженных сигналов по обеим угловым координатам, которая может быть определена заранее.
Так например, в РЛС средней дальности для шага перемещения луча антенны Δθ, равного ≈0.5 ширины луча антенны по уровню половинной мощности, при обнаружении крупных летательных аппаратов формируется двумерный угловой пакет обнаруженных сигналов по каждой угловой координате не более чем из 5 положений луча. Таким образом, для данного типа РЛС наибольшая величина углового пакета равна 5, т.е. М=5.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М.: Сов. радио, 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Синхронизатор 6 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. - М.: Сов. радио, 1970, с.602-603).
Цифровые элементы: запоминающее устройство обнаруженных сигналов 8, блок формирования угловых пакетов 9, вычислитель 10, запоминающее устройство эталонных пакетов 11, блок сравнения 12 выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина. - М.: Радио и связь, 1984).
Блок формирования угловых пакетов 9 построен на основе известной структурной схемы (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974, с.38-40, рис.1.11).
Вычислитель 10 реализует функцию определения угловых координат в соответствии с формулой (2).
Блок сравнения 12 - вычислитель, реализует функцию сравнения двумерного углового пакета обнаруженных сигналов с эталонными пакетами сигналов и определения поправок (εЭ0, βЭ0) в соответствии с формулой (4), а также для последующего расчета угловых координат объекта (εT0, βT0) в соответствии с формулой (3).
Работа заявляемой РЛС при измерении угловых координат объекта происходит следующим образом. В передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3 и поступают в приемник 4, где усиливаются. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные таким образом сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат объекта 7. Значения амплитуд сигналов с соответствующими угловыми координатами луча по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок формирования угловых пакетов 9, где происходит объединение обнаруженных сигналов в угловой пакет исходя из условия отсутствия пропусков сигналов одновременно по обеим угловым координатам (фиг.1). Амплитуды сигналов пакета и соответствующие им угловые координаты луча поступают на М входов вычислителя 10 и на первую группу входов блока сравнения 12. В вычислителе 10 в соответствии с известным способом по формуле (2) определяются предварительные (грубые) значения угловых координат объекта (εo, βo).
Уточнение угловых координат объекта производится следующим образом.
В запоминающем устройстве эталонных пакетов 11 записаны параметры двумерных угловых пакетов сигналов (амплитуды сигналов пакета и соответствующие им угловые координаты луча), заранее рассчитанные для различных положений объекта, находящегося в пределах границ, определяемых погрешностью предварительного определения угловых координат объекта. Положение объекта при этом задается по каждой угловой координате с шагом, выбранным исходя из требуемой в РЛС точности определения угловых координат объекта (фиг.3).
В блоке сравнения 12 производится сравнение сформированного по объекту двумерного углового пакета обнаруженных сигналов, параметры которого поступают с М выходов блока формирования угловых пакетов 9, с эталонными двумерными угловыми пакетами сигналов, параметры которых поступают с М выходов запоминающего устройства эталонных пакетов 11. При этом по принятому критерию (4) сравниваются амплитуды сигналов пакетов в соответствующих положениях луча. В результате сравнения осуществляется выбор эталонного углового пакета, наиболее близкого к реально сформированному по объекту угловому пакету обнаруженных сигналов, а соответствующие ему угловые координаты объекта (εЭ0, βЭ0) используются в качестве поправок к угловым координатам объекта (εo, βo).
В блоке сравнения 12 уточненные угловые координаты объекта (εT0, βT0) вычисляются в соответствии с формулой (3) как сумма поступающих с выхода вычислителя 10 угловых координат (εo, βo) и поправок к ним (εЭ0, βЭ0).
Таким образом, заявленные технические решения обеспечивают достижение технического результата - повышение точности измерения угловых координат объекта при ограниченном времени оценки угловых координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2007 |
|
RU2362183C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309427C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ | 2015 |
|
RU2581898C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2008 |
|
RU2363015C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА | 2006 |
|
RU2325669C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2009 |
|
RU2408029C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| Способ измерения угловых координат цели | 2016 |
|
RU2649880C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ | 2008 |
|
RU2366971C1 |
Предлагаемые изобретения относятся к области радиолокации и могут быть использованы для измерения угловых координат объектов. Достигаемым техническим результатом является повышение точности измерения угловых координат объекта при ограниченном времени оценки угловых координат. Указанный технический результат достигается тем, что после первоначального определения угловых координат объекта проводят их уточнение, для чего сформированный по объекту двумерный угловой пакет обнаруженных сигналов сравнивают с эталонными двумерными угловыми пакетами сигналов, заранее рассчитанными для того же вида обзора при различных угловых положениях объекта, задаваемых в окрестности первоначально определенных угловых координат объекта, при этом границы упомянутой окрестности определяются погрешностью первоначального определения угловых координат объекта, и по результатам сравнения по принятому критерию выбирают эталонный двумерный угловой пакет сигналов, наиболее близкий к сформированному двумерному угловому пакету обнаруженных сигналов, после чего угловые координаты объекта, соответствующие выбранному эталонному двумерному угловому пакету сигналов, используют в качестве поправок к угловым координатам объекта. 2 н. и 1 з.п. ф-лы, 4 ил.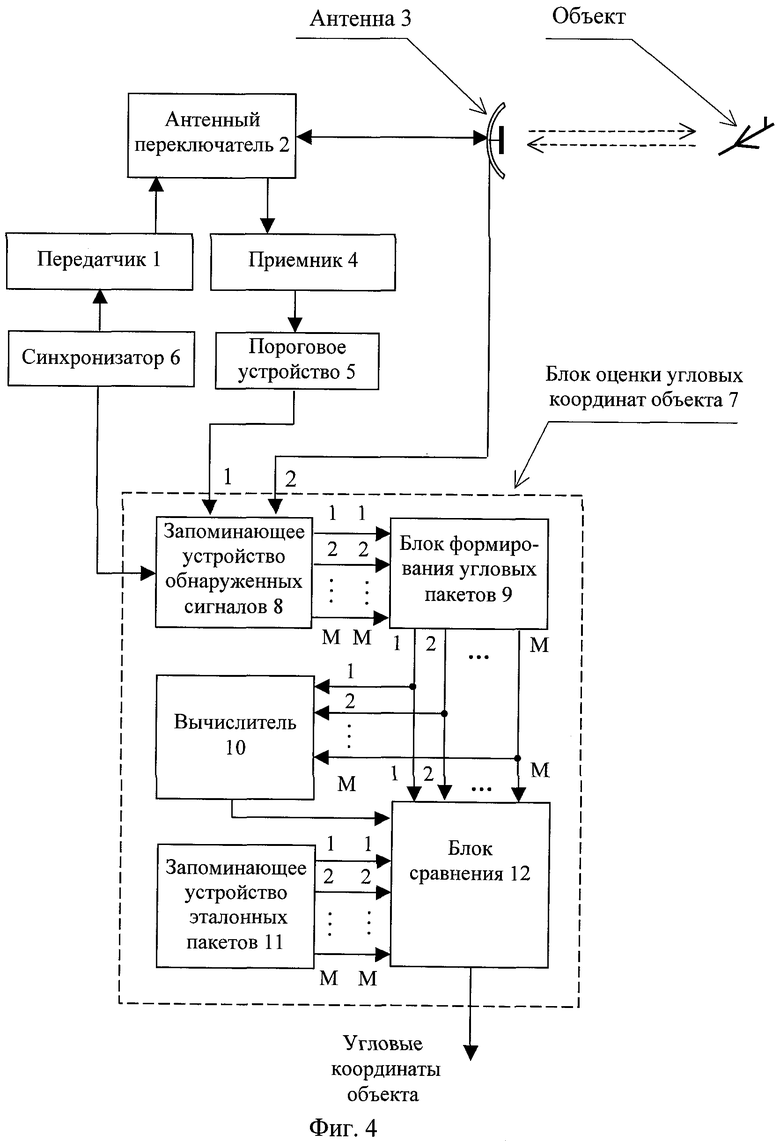
1. Способ измерения угловых координат объекта в процессе обзора пространства радиолокационной станцией, включающий излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание амплитуд обнаруженных сигналов и соответствующих им угловых координат луча, формирование двумерного углового пакета обнаруженных сигналов, предварительное определение угловых координат объекта (εo, βо) с известной погрешностью, отличающийся тем, что после предварительного определения угловых координат объекта (εо, βо) проводят их уточнение, для чего сформированный двумерный угловой пакет обнаруженных сигналов сравнивают по принятому критерию с эталонными двумерными угловыми пакетами сигналов, заранее рассчитанными для того же вида обзора при различных угловых положениях объекта, задаваемых в окрестности предварительно определенных угловых координат объекта (εо, βо), при этом границы упомянутой окрестности определяются известной погрешностью предварительного определения угловых координат объекта (εо, βо), и по результатам сравнения по принятому критерию выбирают эталонный двумерный угловой пакет сигналов, наиболее близкий к сформированному двумерному угловому пакету обнаруженных сигналов, после чего угловые координаты объекта (εЭ0, βЭ0), соответствующие выбранному эталонному двумерному угловому пакету сигналов, используют в качестве поправок к предварительно определенным угловым координатам объекта (εо, βо), при этом уточненные угловые координаты объекта (εТ0, βТ0) вычисляют по формуле:
2. Способ по п.1, отличающийся тем, что в качестве критерия, в соответствии с которым выбирают эталонный двумерный угловой пакет сигналов, принимают сумму квадратов отклонений модулей амплитуд сигналов в сформированном угловом пакете, нормированных к сумме модулей амплитуд сигналов, входящих в этот пакет, от нормированных модулей амплитуд сигналов в эталонном угловом пакете, нормированных к сумме модулей амплитуд сигналов, входящих в этот пакет, при этом поправки угловых координат объекта определяют при наименьшей указанной сумме квадратов отклонений из следующей формулы:
 ,
,
где (εK, βL) - угловые координаты объекта по углу места и азимуту соответственно в эталонном пакете обнаруженных сигналов в пределах границ погрешности определения угловых координат объекта;
i, j - номер углового положения луча в сформированном двумерном угловом пакете обнаруженных сигналов по углу места и азимуту соответственно;
М, N - количество угловых положений луча в двумерном угловом пакете по углу места и азимуту соответственно;
(εo, βo) - предварительно измеренные угловые координаты объекта по углу места и азимуту соответственно;
(εi, βi) - угловые координаты луча в сформированном двумерном угловом пакете обнаруженных сигналов по углу места и азимуту соответственно при обзоре;
А(εi-εо, βj-βo) - измеренная амплитуда сигнала в сформированном двумерном угловом пакете обнаруженных сигналов в положении луча с координатами (εi, βi) при положении объекта в точке с измеренными координатами (εo, βo);
АЭ(εi-εK, βj-βL) - амплитуда сигнала в эталонном двумерном угловом пакете сигналов в положении луча с координатами (εi, βj) при положении объекта в точке с координатами (εK, βL).
3. Радиолокационная станция (РЛС), содержащая передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловых координат объекта, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат объекта, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока оценки угловых координат объекта соответственно, при этом блок оценки угловых координат объекта включает запоминающее устройство обнаруженных сигналов, блок формирования угловых пакетов и вычислитель, предназначенный для определения предварительных значений угловых координат, причем первый и второй входы запоминающего устройства обнаруженных сигналов являются первым и вторым входами блока оценки угловых координат объекта соответственно, для передачи по командам синхронизатора данных, записанных в запоминающем устройстве обнаруженных сигналов, в блок формирования угловых пакетов, М выходов запоминающего устройства обнаруженных сигналов соединены с М входами блока формирования угловых пакетов, М выходов которого соединены с М входами указанного вычислителя, отличающаяся тем, что в блок оценки угловых координат объекта введены запоминающее устройство эталонных пакетов и блок сравнения, причем первая группа из М входов блока сравнения соединена с М выходами блока формирования угловых пакетов, вторая группа из М входов блока сравнения соединена с М выходами запоминающего устройства эталонных пакетов, выход вычислителя соединен с 2×М+1-м входом блока сравнения, выход блока сравнения является выходом РЛС.
| САМСОНЕНКО С.В | |||
| Цифровые методы оптимальной обработки радиолокационных сигналов | |||
| - М.: Воениздат МО СССР, 1968, с.254-258 | |||
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2258941C1 |
| US 5166689 A, 24.11.1992 | |||
| US 5281973 A, 25.01.1994 | |||
| US 5512909 A, 30.04.1996. | |||

