Предлагаемые технические решения относятся к области радиолокации, в частности к радиолокационным измерениям, и могут быть использованы в радиолокационных станциях (РЛС) для измерения диаграммы обратного вторичного излучения. Такая диаграмма требуются, например, при распознавании объектов, селекции объектов на фоне помех и т.п.
Приведем известную терминологию, используемую далее в описании (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, «Сов. Радио», 1970, стр. 26-27). Отношение плотности потока мощности рассеянной объектом вторичной волны к плотности потока мощности первичной волны, имеющее размерность площади, называют эффективной поверхностью обратного вторичного излучения, эффективной поверхностью рассеяния (ЭПР) и обозначают σ.
Величина ЭПР является функцией направления облучения объекта, т.е. зависит от ориентации объекта относительно РЛС. Ориентацию объекта принято определять величиной курсового угла θ, равного углу между проекцией вектора скорости объекта на горизонтальную плоскость, построенную в точке стояния РЛС, и проекцией линии визирования объекта на ту же плоскость (фиг.1). Для РЛС с пространственно совмещенными передатчиком и приемником зависимость ЭПР объекта от его курсового угла θ образует диаграмму обратного вторичного излучения объекта σ(θ). ЭПР объекта, таким образом, представляет собой значение диаграммы обратного вторичного излучения, соответствующее фиксированному курсовому углу θ, т.е. σ=σ(θ). Таким образом, термины «ЭПР объекта» и «значение диаграммы обратного вторичного излучения объекта» обозначают одну и ту же физическую величину, т.е. являются эквивалентными.
Известен способ измерения диаграммы обратного вторичного излучения объекта (Теоретические основы радиолокации, под ред. Я.Д.Ширмана, М., «Сов. радио», 1970, стр. 25-27). Суть способа состоит в том, что объект фиксируют на расстоянии R от РЛС при известном курсовом угле θ, облучают сигналом РЛС, измеряют плотность потока мощности первичной волны Sц, плотность потока мощности рассеянной объектом вторичной волны Snp, рассчитывают значение диаграммы обратного вторичного излучения:  После этого изменяют курсовой угол θ и повторяют измерения. После многократных измерений значений величины σ(θ) для различных значений курсового угла в во всем его диапазоне (0°, 360°) получают круговую диаграмму обратного вторичного излучения объекта.
После этого изменяют курсовой угол θ и повторяют измерения. После многократных измерений значений величины σ(θ) для различных значений курсового угла в во всем его диапазоне (0°, 360°) получают круговую диаграмму обратного вторичного излучения объекта.
Известный способ реализован, например, с помощью устройства («Автоматизированные измерения эффективной отражающей поверхности», - «Экспресс-информация», сер. «Радиолокация, телевидение, радиосвязь», №24, 1974, стр. 3-6), содержащего эталонный отражатель, передающую и приемную антенны, передатчик, приемник, вычислитель, при этом выход передатчика соединен со входом передающей антенны, выход приемной антенны соединен со входом приемника, выход которого соединен с вычислителем.
Известное устройство работает следующим образом. Вначале производится калибровка устройства. Для чего в направлении эталонного отражателя с известной ЭПР σЭ, расположенного на расстоянии R=RЭ от РЛС, с помощью передающей антенны излучается сформированный передатчиком РЛС зондирующий сигнал РЗС. Отраженный сигнал принимается приемником и измеряется его мощность РЭ. В вычислителе по формуле рассчитывается ЭПР эталонного отражателя (Штагер Е.А. Рассеяние радиоволн на телах сложной формы. М., «Радио и связь», 1986, стр. 10, формула (1.8)):
Вычисленная величина ЭПР (обозначим ее σЭВ) сравнивается с известным значением ЭПР σЭ. Разница между рассчитанным и известным значением ЭПР, равная Δσ=σЭ-σЭВ, представляет собой инструментальную поправку, которая запоминается. Объект, значение диаграммы обратного вторичного излучения σ(θ) которого измеряется, устанавливается на расстоянии R от РЛС при определенном курсовом угле θ. В направлении на объект и в направлении эталонного отражателя излучаются одинаковые зондирующие сигналы мощностью PЗС. Отраженные сигналы принимаются РЛС, измеряются мощности принятых сигналов, отраженных соответственно от объекта (PП) и от эталонного отражателя (РЭ), вычисляется значение диаграммы обратного вторичного излучения объекта σ(θ) по формуле (1). В вычислителе для учета инструментальной поправки величины σ(θ) и Δσ складываются. Измерения повторяют многократно для различных значений курсового угла θ. В результате формируется диаграмма обратного вторичного излучения объекта.
В указанных технических решениях значения диаграммы обратного вторичного излучения объекта измеряются для известных значений его курсового угла. Такая определенность может быть достигнута только в стационарных условиях, когда объект предварительно устанавливается в требуемом положении, и курсовой угол при этом может быть с высокой точностью измерен с помощью дополнительного оборудования. В условиях реальной работы обзорной РЛС, при которой объекты, как правило, находятся на больших расстояниях, высотах и перемещаются, такие условия не могут быть обеспечены.
Недостатком известных способа и устройства является, таким образом, невозможность их применения в условиях реальной работы обзорной РЛС.
Наиболее близкие к заявляемым способ и устройство (РЛС) описаны в патенте РФ № 2217774 от 27.11.2003 г.
Наиболее близкий способ измерения диаграммы обратного вторичного излучения объекта включает излучение трех зондирующих сигналов мощностью РЗС в окрестности направления на объект с достаточно малой задержкой, исключающей искажение результатов измерения при перемещении объекта, измерение мощности принимаемых отраженных сигналов P1, Р2, Р3 и координат объекта: дальности R, угла места ε, азимута β, вычисление значения диаграммы обратного вторичного излучения по формуле
где РП=Рε×Рβ,


 - мощность собственных шумов приемника РЛС;
- мощность собственных шумов приемника РЛС;
Δε, Δβ - отклонения луча по углу места и азимуту соответственно, нормированные к ширине луча по уровню половинной мощности, при излучении импульсов в окрестности направления на объект;
α=5,56 - коэффициент, описывающей форму главного луча ДНА;
G - коэффициент усиления антенны;
λ - длина волны.
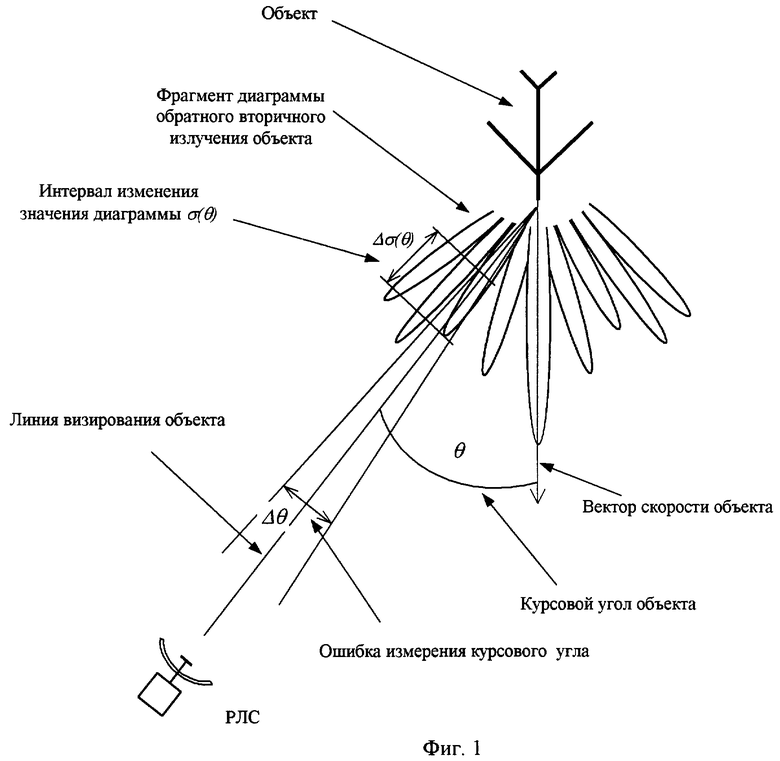
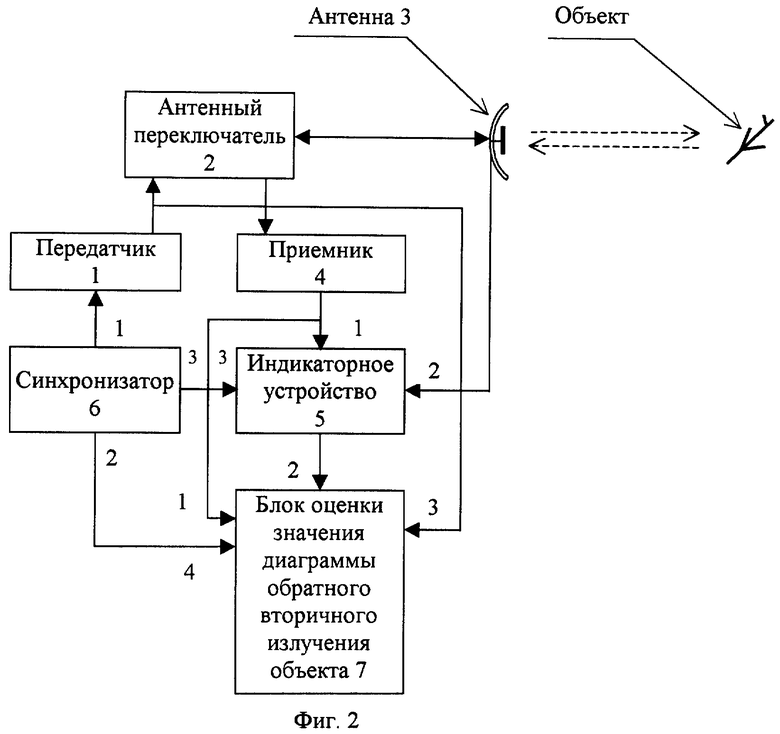
Наиболее близкая радиолокационная станция (фиг.2) содержит передатчик 1, антенный переключатель 2, антенну 3, приемник 4, индикаторное устройство 5, синхронизатор 6, блок оценки значения диаграммы обратного вторичного излучения объекта 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход-выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход приемника 4 и координатный выход антенны 3 соединены соответственно с первым и вторым входами индикаторного устройства 5, выход приемника 4, выход индикаторного устройства 5 и выход передатчика 1 соединены соответственно с первым, вторым и третьим входами блока оценки значения диаграммы обратного вторичного излучения объекта 7, каждый из трех выходов синхронизатора 6 соединен с синхровходами передатчика 1, индикаторного устройства 5 и блока оценки значения диаграммы обратного вторичного излучения объекта 7.
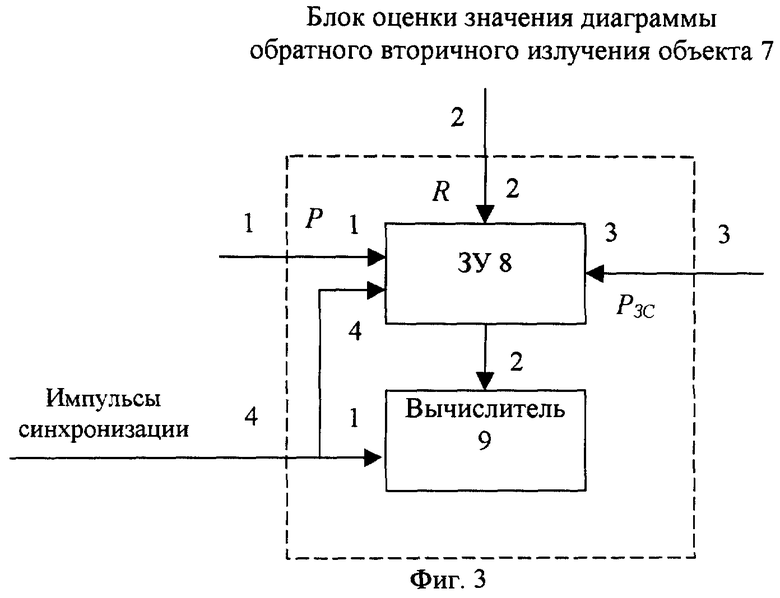
Блок оценки значения диаграммы обратного вторичного излучения объекта 7 состоит (фиг.3) из ЗУ 8 и вычислителя 9, причем выход ЗУ 8 соединен со вторым входом вычислителя 9. Первый, второй, третий входы ЗУ 8 являются соответственно первым, вторым, третьим входами блока, соединенные между собой четвертый вход ЗУ 8 и первый вход вычислителя 9 образуют четвертый вход блока.
Указанные наиболее близкие технические решения могут быть применены в процессе реальной работы РЛС. Однако в них измерение диаграммы обратного вторичного излучения σ(θ) объекта сопровождается значительными ошибками. Поясним причины возникновения ошибок измерения.
Как было отмечено ранее, значение диаграммы обратного вторичного излучения σ(θ) функционально связано с величиной курсового угла объекта θ. Поэтому любая ошибка в измерении θ затрудняет однозначное сопоставление измеренного значения величены σ(θ) и соответствующего этому измерению курсового угла объекта. Так, например, если ошибка измерения курсового угла такова, что его измеренное значение находится в интервале Δθ, то значение диаграммы обратного вторичного излучения находится в пределах σmin=(θ)≤σ(θ)≤σmax(θ), где σmin(θ), σmax(θ) - наименьшее и наибольшее значения величины σ(θ) в указанном интервале значений курсового угла, т.е. ошибка измерения величины σ(θ) равна Δσ(θ)=σmax(θ)-σmin(θ) (фиг.1).
В наиболее близких технических решениях величины σmin(θ) и σmax(θ) соответствуют интервалу изменения курсового угла θ во всем возможном его диапазоне (0°, 360°), т.е. сопоставление измеренного значения σ(θ) с каким-либо курсовым углом объекта невозможно. Это означает, что ошибки измерения σ(θ) так велики, что диаграмма обратного вторичного излучения объекта фактически не может быть измерена.
Таким образом, решаемой задачей (техническим результатом) является увеличение точности измерения диаграммы обратного вторичного излучения объекта в условиях реальной работы обзорной РЛС.
Технический результат достигается тем, что в способе измерения диаграммы обратного вторичного излучения объекта, включающем излучение трех зондирующих сигналов в окрестности направления на объект с достаточно малой задержкой, исключающей искажение результатов измерения при перемещении объекта, измерение мощности принимаемых отраженных сигналов и координат объекта Rn-1, εn-1, βn-1 по дальности, углу места и азимуту соответственно, где n - номер измерения координат, вычисление значения диаграммы обратного вторичного излучения, согласно изобретению, после каждого измерения значения диаграммы обратного вторичного излучения производят, по крайней мере, одно дополнительное, отстоящее по времени от предыдущего, измерение координат объекта Rn, εn, βn и оценивают курсовой угол объекта θ, соответствующий измеренному значению диаграммы обратного вторичного излучения, по формуле

где 


Технический результат достигается тем, что в радиолокационной станции, содержащей передатчик, антенный переключатель, антенну, приемник, индикаторное устройство, синхронизатор, блок оценки значения диаграммы обратного вторичного излучения объекта, при этом выход передатчика соединен со входом антенного переключателя и с третьим входом блока оценки значения диаграммы обратного вторичного излучения объекта, вход-выход антенного переключателя соединен с антенной, выход антенного переключателя соединен со входом приемника, выход приемника соединен с первым входом индикаторного устройства и первым входом блока оценки диаграммы обратного вторичного излучения объекта, координатный выход антенны соединен со вторым входом индикаторного устройства, выход которого соединен со вторым входом блока оценки значения диаграммы обратного вторичного излучения объекта, первый выход синхронизатора соединен со входом передатчика, второй выход - с четвертым входом блока оценки значения диаграммы обратного вторичного излучения объекта, третий выход - с третьим входом индикаторного устройства, согласно изобретению, введен блок оценки курсового угла объекта, четыре входа которого соединены соответственно с выходом блока оценки значения диаграммы обратного вторичного излучения объекта, с выходом индикаторного устройства, с координатным выходом антенны, со вторым выходом синхронизатора.
Поясним сущность предлагаемых технических решений.
Как следует из описания наиболее близкого способа, основная причина низкой точности измерения значения диаграммы обратного вторичного излучения σ(θ) состоит невозможности оценки курсового угла объекта θ.
В заявляемых технических решениях для оценки курсового угла производится дополнительное измерение координат объекта. В результате появляются два отстоящих по времени измерения координат: Rn-1, εn-1, βn-1 и Rn, εn, βn (дальности, угла места и азимута соответственно) в предыдущем (индекс n-1) и текущем (индекс n) измерениях координат. По полученным таким образом измерениям в соответствии с формулой (3) определяется курсовой угол θ. Указанные измерения могут быть проведены, например, при регулярном осмотре РЛС зоны обзора или в процессе сопровождения траектории объекта.
Измеренные таким образом значения курсового угла θ вместе с соответствующими значениями величины σ(θ) запоминаются. Измерения повторяются многократно для различных значений курсового угла в требуемом диапазоне его изменения.
Чтобы изменение курсового угла θ происходило в требуемых пределах, необходимо выбрать соответствующую траекторию движения объекта. Так, например, чтобы измерить диаграмму σ(θ) вкруговую, необходимо, чтобы при движении объекта курсовой угол θ принимал все возможные значения (0°, 360°).
Так как измерение координат в РЛС осуществляется с высокой точностью, точность измерения σ(θ) обеспечивается также достаточно высокой. Таким образом достигается заявленный в изобретении технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - вид сверху на горизонтальную плоскость, проходящую через точку стояния РЛС, поясняет взаимное положение проекции продольной оси объекта и проекции линии визирования объекта на эту плоскость, образующих курсовой угол θ, а также иллюстрирует возникновение ошибок Δσ(θ) значения диаграммы обратного вторичного излучения объекта за счет ошибок Δθ измерения курсового угла.
Фиг.2 - функциональная схема наиболее близкой РЛС.
Фиг.3 - функциональная схема блока оценки значения диаграммы обратного вторичного излучения объекта 7.
Фиг.4 - функциональная схема заявляемой РЛС.
Фиг.5 - функциональная схема блока оценки курсового угла объекта.
Заявляемая радиолокационная станция (фиг.4) содержит передатчик 1, антенный переключатель 2, антенну 3, приемник 4, индикаторное устройство 5, синхронизатор 6, блок оценки значения диаграммы обратного вторичного излучения объекта 7, блок оценки курсового угла объекта 10, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход приемника 4 и координатный выход антенны 3 соединены соответственно с первым и вторым входами индикаторного устройства 5, выход приемника 4, выход индикаторного устройства 5 и выход передатчика 1 соединены соответственно с первым, вторым и третьим входами блока оценки значения диаграммы обратного вторичного излучения объекта 7, выходы синхронизатора 6 соединены с синхровходами передатчика 1, индикаторного устройства 5, блока оценки значения диаграммы обратного вторичного излучения объекта 7, блока оценки курсового угла 10, три входа блока оценки курсового угла объекта 10 соединены соответственно с выходом блока оценки значения диаграммы обратного вторичного излучения объекта 7, выходом индикаторного устройства 5, координатным выходом антенны 3.
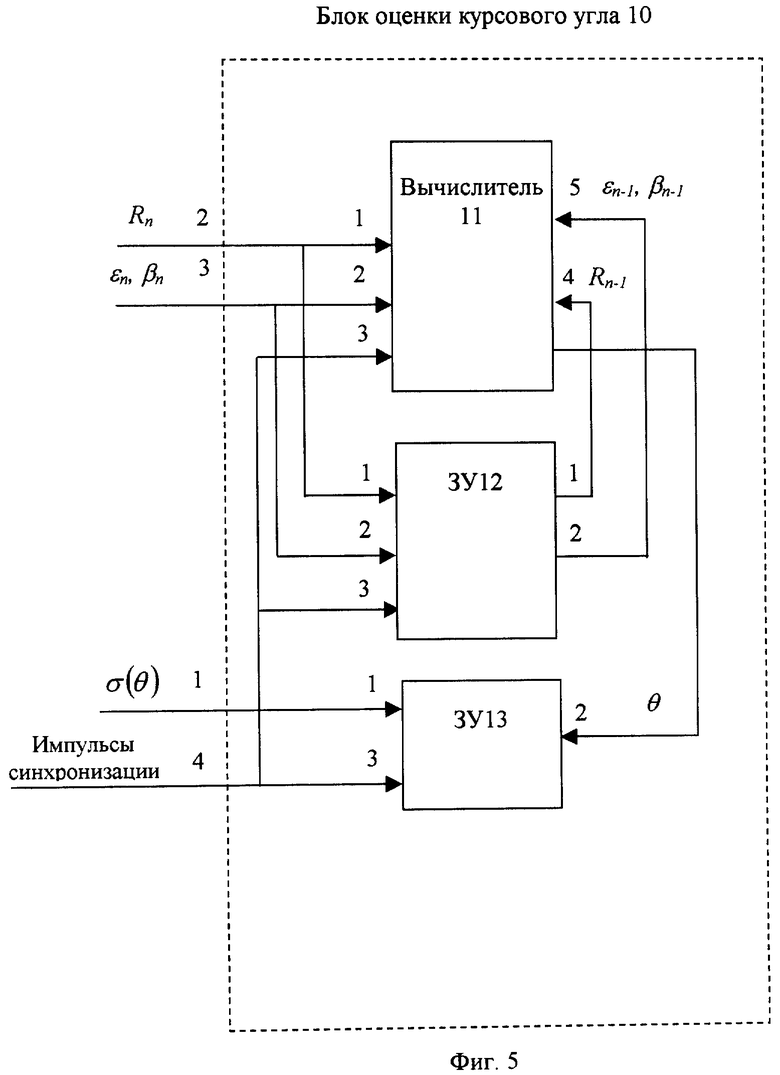
Блок оценки курсового угла объекта 10 (фиг.5) состоит из вычислителя 11, ЗУ 12, ЗУ 13, причем первый вход ЗУ 13 является первым входом блока, соединенные между собой первые входы вычислителя 11 и ЗУ 12 и соединенные между собой вторые входы этих блоков образуют соответственно второй и третий входы блока, соединенные между собой третьи входы вычислителя 11, ЗУ 12, ЗУ 13 образуют четвертый вход блока, первый и второй выходы ЗУ 12 соединены соответственно с четвертным и пятым входами вычислителя 11, выход вычислителя 11 соединен со вторым входом ЗУ 13.
Заявляемая радиолокационная станция может быть выполнена с использованием следующих известных функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т.2, - М.: «Сов. радио», 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Индикаторное устройство 5 - индикатор кругового обзора с вращающейся отклоняющей системой (Радиолокационные устройства. Под редакцией В.В.Григорина-Рябова. Изд-во «Сов. радио», М., 1970, стр. 271-275).
Синхронизатор 6 - Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова, стр. 602-603.
Цифровые элементы: вычислитель 9, 11, ЗУ 8, 12, 13 - выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, - М.: «Радио и связь», 1984).
Работа заявляемой РЛС происходит следующим образом (фиг.4, фиг.5). В передатчике 1 по командам (импульсам) синхронизатора 6 формируются три одинаковых зондирующих сигнала (мощностью РЗС), которые с помощью антенны 3 с достаточно малой задержкой во времени излучаются в отличающиеся направления в окрестности направления на объект. Отраженные от объекта сигналы принимаются антенной 3, поступают в приемник 4, где измеряется мощность каждого из них (P1, Р2, Р3). Сигналы с выхода приемника 4 и сигналы, пропорциональные угловому положению луча антенны 3, поступают на первый и второй входы индикаторного устройства 5 соответственно. В индикаторном устройстве 5 определяется дальность R до обнаруженного объекта и осуществляется отображение радиолокационной информации. С выходов приемника 4, индикаторного устройства 5 и передатчика 1 в блок оценки значения диаграммы обратного вторичного излучения объекта 7 поступают сигналы, пропорциональные мощностям принимаемых отраженных сигналов (P1, P2, Р3), дальности до объекта (R) и мощности зондирующего сигнала (Рзс) соответственно, и по формуле (2) в этом блоке вычисляется значение диаграммы обратного вторичного излучения объекта σ(θ).
Для измерения курсового угла объекта θ в направлении на объект излучается дополнительный зондирующий сигнал. После чего на первые входы вычислителя 11 и ЗУ 12 блока оценки курсового угла объекта 10 с выхода индикаторного устройства 5 поступают значения дальности до объекта Rn, а на вторые входы указанных блоков с координатного выхода антенны 3 поступают значения угла места εn и азимута βn. На первый вход ЗУ 13 поступают измеренные в блоке 7 значения σ(θ). На третьи входы вычислителя 11, ЗУ 12, ЗУ 13 подаются импульсы синхронизации с синхронизатора 6, управляющие работой блока. В вычислителе 11 в соответствии с формулой (3) производится вычисление величины курсового угла θ, которая поступает на второй вход ЗУ 13 и хранится там. При вычислении θ в качестве предыдущих координат объекта Rn-1, εn-1 и βn-1 используются координаты, записанные в ЗУ 12 при предыдущем измерении. Для этого они с двух выходов ЗУ 12 подаются на четвертый и пятый входы вычислителя 11. Описанные измерения повторяются многократно в процессе получения РЛС данных об объекте. Таким образом, в ЗУ 13 оказываются записанными значения диаграммы обратного вторичного излучения объекта σ(θ) с соответствующими величинами курсовых углов θ в требуемом интервале изменения, то есть формируется диаграмма обратного вторичного излучения объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА, ОБЛУЧАЕМОГО ВНЕШНИМИ ИСТОЧНИКАМИ ИЗЛУЧЕНИЯ, И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285939C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОТАЮЩЕЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2457505C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358281C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2362182C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217774C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309427C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОБЪЕКТА (ВАРИАНТЫ) И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2426147C2 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2007 |
|
RU2362183C1 |
Изобретения относятся к области радиолокации, в частности к радиолокационным измерениям, и могут быть использованы для измерения диаграммы обратного вторичного излучения объектов в процессе реальной работы РЛС. Достигаемым техническим результатом является увеличение точности измерения диаграммы обратного вторичного излучения объектов в условиях реальной работы обзорной РЛС. Технический результат достигается за счет того, что в способе измерения диаграммы обратного вторичного излучения объекта проводят оценку курсового угла объекта по двум отстоящим по времени измерениям координат объекта. В РЛС, реализующей указанный способ, введен блок оценки курсового угла объекта. 2 н.п. ф-лы, 5 ил.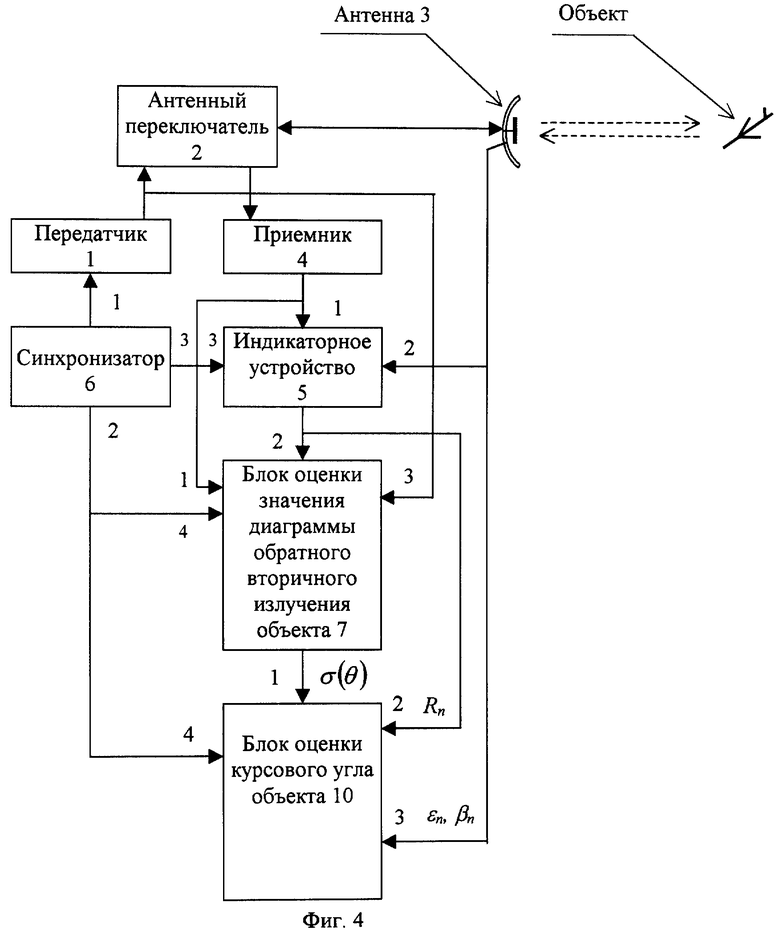

при Rn-1cosεn-1≥Rncosεn
или

при Rn-1cosεn-1<Rncosεn.
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217774C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ОБЪЕКТОВ | 2001 |
|
RU2210789C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОПЕРЕЧНЫХ РАЗМЕРОВ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ РЛС В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 1999 |
|
RU2150714C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2204842C2 |
| US 5189424 A, 23.02.1993 | |||
| Устройство для получения потока сыпучих материалов с заданной плотностью | 1977 |
|
SU690315A1 |
| US 5173703 A, 22.12.1992. | |||

