Текст описания в факсимильном виде (см. графическую часть).
Способ и система относятся к авиационным газотурбинным двигателям и конкретно к поворотным выхлопным соплам. Способ обеспечивает регулирование величины перемещения трех распределенных по окружности исполнительных механизмов, прикрепленных в соответствующих местах присоединения к приводному кольцу, устанавливаемому в заданное положение для управления вектором тяги в выхлопном сопле газотурбинного двигателя. Задают угловое положение каждого из мест присоединения исполнительных механизмов на окружности и осуществляют независимые вычисления величины перемещения для каждого из исполнительных механизмов с использованием мест присоединения в ответ на команды на поворот вокруг горизонтальной оси и поворот вокруг вертикальной оси. После этого приводятся в действие исполнительные механизмы для осуществления ими соответствующих перемещений с целью установки сопла в заданное положение. В предпочтительном варианте осуществления угловые положения задаются один раз, и тригонометрические функции углов, соответствующих данным угловым положениям, вычисляются и сохраняются в памяти. Система управления содержит средства для задания углового положения каждого из мест присоединения исполнительных механизмов на окружности, средства для независимого вычисления величины перемещения каждого из исполнительных механизмов и средства для приведения в действие исполнительных механизмов. Такой способ и такая система позволяют уменьшить сложность алгоритмов управления и уменьшить потребность в повторяющихся вычислениях. 2 с. и 14 з.п. ф-лы, 5 ил.
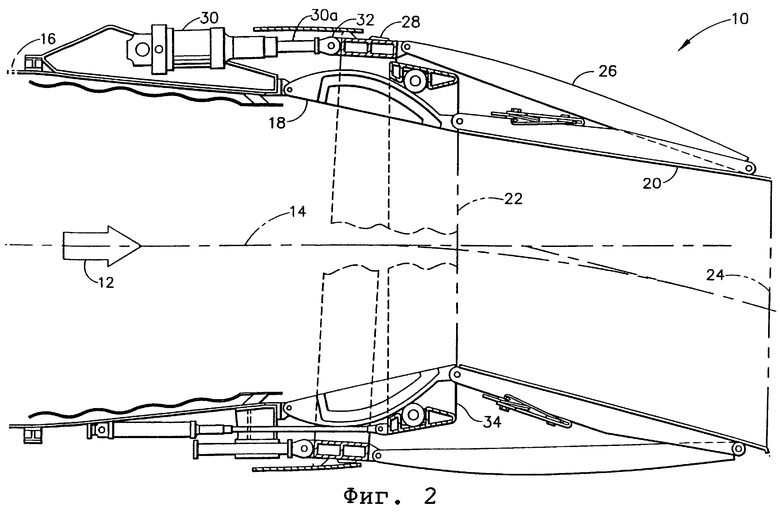
1. Способ регулирования величины перемещения, по меньшей мере, трех распределенных по окружности исполнительных механизмов, прикрепленных в соответствующих местах присоединения к приводному кольцу в выхлопном сопле газотурбинного двигателя, включающий в себя следующие операции: задание углового положения каждого из мест присоединения исполнительных механизмов на окружности; независимое вычисление величины перемещения для каждого из исполнительных механизмов с использованием указанных положений мест присоединения в ответ на команды на поворот вокруг горизонтальной оси и поворот вокруг вертикальной оси, и приведение в действие исполнительных механизмов для осуществления ими перемещений на соответствующие величины с целью установки сопла в заданное положение.2. Способ по п.1, при котором величина перемещения включает в себя составляющие, характеризующие общее скольжение указанного кольца в осевом направлении, его поворот вокруг горизонтальной оси и его поворот вокруг вертикальной оси, причем составляющие, характеризующие поворот вокруг горизонтальной оси (θPIT) и поворот вокруг вертикальной оси (θYAW), содержат тригонометрические функции указанных угловых положений и величина перемещения (А9) определяется следующим уравнением:
А9м=А9SLIDE+(R×cosθM)·sinθPIT+(R×sinθM)·sinθYAW,
где индекс "М" представляет собой индекс соответствующего исполнительного механизма;
А9SLIDE - составляющая, характеризующая одинаковую величину перемещения для каждого исполнительного механизма;
θМ - угловое положение;
R - радиус кольца.
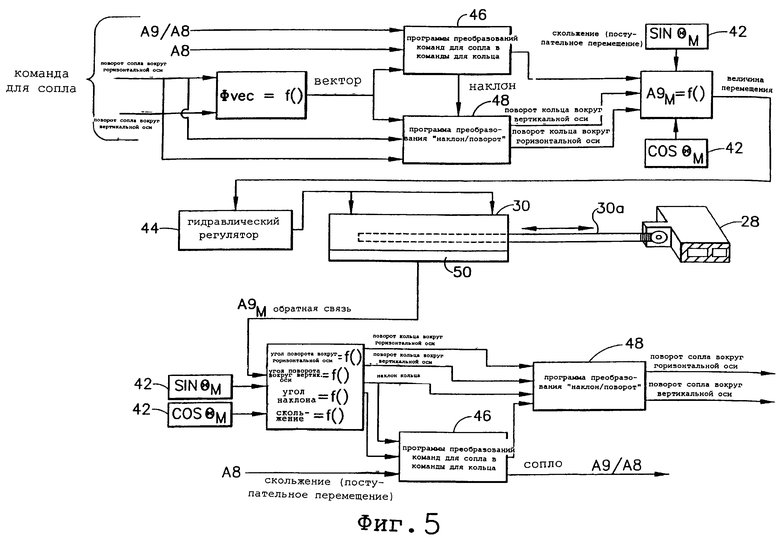
3. Способ по п.2, дополнительно включающий в себя следующие операции: задание указанных угловых положений, по меньшей мере, один раз; вычисление указанных тригонометрических функций указанных угловых положений; сохранение в памяти вычисленных тригонометрических функций угловых положений и использование сохраненных тригонометрических функций при последующем вычислении величины перемещения при изменении команд на поворот вокруг горизонтальной оси и поворот вокруг вертикальной оси.4. Способ по п.3, при котором величина перемещения исполнительного механизма представляет собой сумму величины скольжения в осевом направлении, произведения синуса заданного по команде угла поворота вокруг горизонтальной оси и косинуса углового положения места присоединения, умноженного на радиус, измеренный от осевой линии указанного кольца, и произведения синуса заданного по команде угла поворота вокруг вертикальной оси и синуса углового положения места присоединения, умноженного на указанный радиус кольца.5. Способ по п.3, при котором выхлопное сопло имеет четвертый исполнительный механизм, прикрепленный в четвертом месте присоединения к приводному кольцу, находящемуся на окружности между парой из указанных трех исполнительных механизмов, и дополнительно включающий в себя следующие операции: задание углового положения четвертого места присоединения на окружности; вычисление величины перемещения для четвертого исполнительного механизма в ответ на команды на поворот вокруг горизонтальной оси и поворот вокруг вертикальной оси; измерение величины перемещения для каждого из указанных исполнительных механизмов и повторное вычисление величины перемещения для четвертого исполнительного механизма как функции измеренных величин перемещения для указанных трех исполнительных механизмов с целью проверки смещения указанного кольца в общей плоскости.6. Способ по п.5, при котором повторно вычисленная величина перемещения четвертого исполнительного механизма представляет собой функцию разностей углов между каждым из четырех указанных угловых положений мест присоединения и каждым другим.7. Способ по п.6, при котором величина перемещения четвертого исполнительного механизма включает в себя дифференциальные тригонометрические функции разностей углов, вычисляют указанные дифференциальные тригонометрические функции при помощи уравнения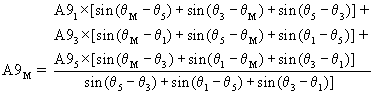
сохраняют полученные значения в памяти и затем вычисляют величину перемещения четвертого исполнительного механизма при использовании сохраненных значений функций разностей углов по мере изменения команд на поворот вокруг горизонтальной оси и поворот вокруг вертикальной оси.
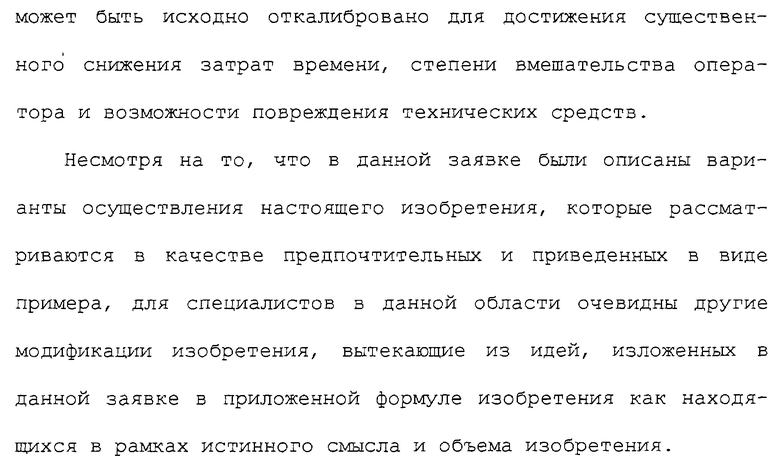
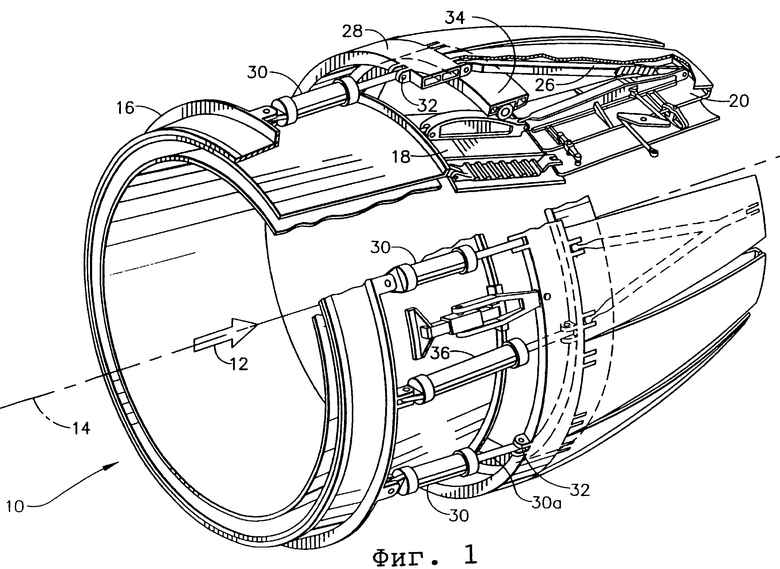
8. Способ по п.3, при котором выхлопное сопло дополнительно включает в себя вспомогательные выхлопные створки, присоединенные у задних концов к соответствующим наружным соединительным элементам, в свою очередь присоединенным к приводному кольцу, причем основные выхлопные створки, присоединенные у задних концов к передним концам вспомогательных створок, образуют критическое сечение, имеющее площадь сечения потока, увеличивающуюся в направлении выходного сечения сопла, имеющего площадь сечения потока; и дополнительно включающий в себя следующие операции: задание команд для сопла, включая команды на поворот сопла вокруг горизонтальной оси и поворот сопла вокруг вертикальной оси с целью направления указанного сопла, задание площади критического сечения и отношения площади выходного сечения к площади критического сечения и преобразование команд для сопла в команды для кольца, включая поворот кольца вокруг горизонтальной оси, поворот кольца вокруг вертикальной оси и скольжение кольца с целью установки кольца в заданное положение и, в свою очередь, установки наружных соединительных элементов и вспомогательных створок в заданные положения в ответ на указанные команды.9. Способ по п.8, дополнительно включающий в себя применение заданных программ для указанных команд для сопла с целью получения команд для кольца.10. Способ по п.3, дополнительно включающий в себя следующие операции: измерение величины перемещения каждого из исполнительных механизмов и регулирование величины перемещения исполнительного механизма в замкнутых цепях обратной связи для сведения к минимуму различий между вычисленными и измеренными величинами перемещения исполнительных механизмов.11. Способ по п.10, включающий в себя вычисление величин скольжения кольца, его поворота вокруг горизонтальной оси и поворота вокруг вертикальной оси, исходя из измеренных величин перемещения и из указанных угловых положений исполнительных механизмов.12. Способ по п.11, при котором вычисленные величины скольжения кольца, его поворота вокруг горизонтальной оси и поворота вокруг вертикальной оси представляют собой функции тригонометрических функций разностей между каждым из трех угловых положений указанных трех мест присоединения и каждым другим и тригонометрические функции разностей углов вычисляют и сохраняют в памяти для последующего использования.13. Система управления для регулирования величины перемещения, по меньшей мере, трех распределенных по окружности исполнительных механизмов, прикрепленных в соответствующих местах присоединения к приводному кольцу, устанавливаемому в заданное положение для управления вектором тяги в выхлопном сопле газотурбинного двигателя, содержащая средства для задания углового положения каждого из мест присоединения исполнительных механизмов на окружности; средства для независимого вычисления величины перемещения для каждого из исполнительных механизмов с использованием положений мест присоединения в ответ на команды на поворот вокруг горизонтальной оси и поворот вокруг вертикальной оси и средства для приведения в действие исполнительных механизмов для осуществления ими перемещений на соответствующие величины с целью установки сопла в заданное положение.14. Система по п.13, в которой средства для задания включают в себя цифровую память, средства вычисления включают в себя программируемый контроллер с цифровым управлением и средства приведения в действие включают в себя гидравлический регулятор, присоединяемый в рабочем положении к каждому из исполнительных механизмов для избирательного выдвижения и отвода их соответствующих выходных тяг.15. Система по п.14, в которой величина перемещения включает в себя составляющие, характеризующие общее скольжение указанного кольца в осевом направлении, его поворот вокруг горизонтальной оси и его поворот вокруг вертикальной оси, причем составляющие, характеризующие поворот вокруг горизонтальной оси (θPIT) и поворот вокруг вертикальной оси (θYAW), содержат тригонометрические функции указанных угловых положений и величина перемещения (А9) определяется следующим уравнением:А9м=А9SLIDE+(R×CosθM)·sinθPIT+(R×sinθM)·sinθYAW,
где индекс "М" представляет собой индекс соответствующего исполнительного механизма;
А9SLIDE - составляющая, характеризующая одинаковую величину перемещения для каждого исполнительного механизма;
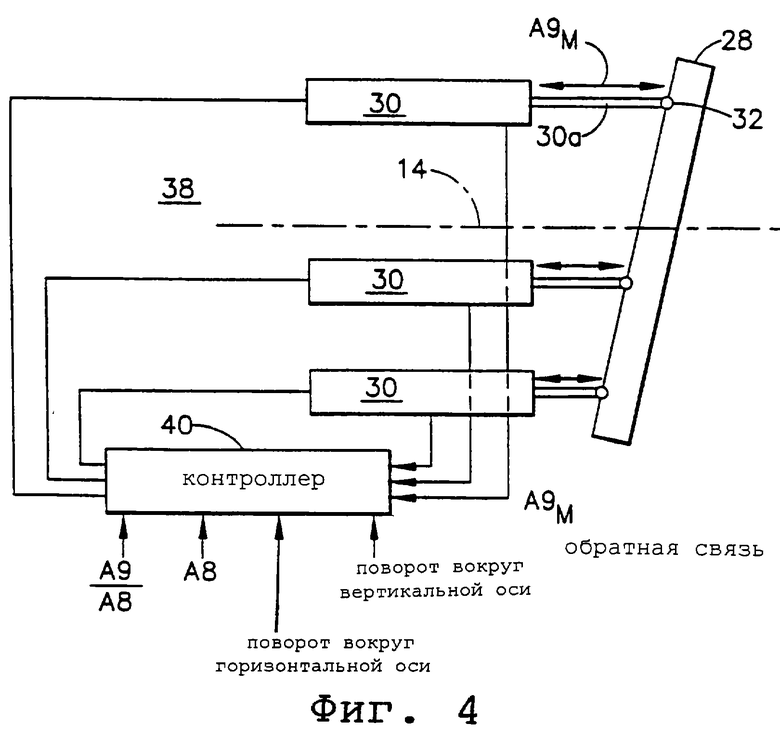
θM - угловое положение;
R - радиус кольца.
16. Система по п.15, в которой память содержит сохраненные значения тригонометрических функций угловых положений sinθM и cosθM указанных мест присоединения.