Изобретение относится к грузоподъемным машинам, в частности к устройствам для гашения колебаний грузов на подвесках кранов с обеспечением точной наводки груза при его установке на место.
Известное устройство для гашения колебаний груза содержит подвешенную на грузовом канате грузовую подвеску, соединенные с ней четыре ветви тормозных канатов, огибаемые ими отклоняющие блоки и ускоряющие полиспасты с подторможенными уравнительными блоками, при этом подвижные обоймы ускоряющих полиспастов соединены с одной ветвью грузового каната [1]. Недостаток устройства - необходимость применения сложных канатно-блочных систем, а также плохое гашение колебаний при средних и малых амплитудах отклонения груза из-за инерционности блоков и трения в полиспастах.
Другое известное устройство разворачивает груз вокруг вертикальной оси, а также ослабляет колебания груза [2]. Оно не может наводить груз на посадочное место, но по отдельным признакам устройство близко к предлагаемому изобретению, и его можно принять в качестве прототипа. Устройство [2] содержит конечное звено приводного механизма, представляющего собой раму, имеющую по меньшей мере одну вращаемую относительно вертикальной оси массивную деталь и по меньшей мере одно устройство для передачи на раму реактивных сил, возникающих от вращения упомянутой массы. Реактивный момент появляется либо за счет инерционных сил вследствие ускорения или замедления скорости вращения массивной детали, либо от дефлекторного устройства, установленного на раме для отражения потоков воздуха в тангенциальном направлении. Потоки воздуха в устройстве создаются вращающимися массами, часть которых выполнена в форме вентиляторных колес.
Основную цель, заявленную в прототипе [21, а именно поворот поднятого груза вокруг вертикальной оси, устройство достигает, так как здесь реализуется принцип регулирования кинетического момента системы "вращающиеся массы устройства - груз". Однако заявленная возможность получения радиальных сил, с помощью которых можно было бы гасить колебания груза на подвеске, реализуется весьма слабо. Это связано с тем, что, как следует из патентных формул [2] и фиг. 3 и 5 к этому патенту, дефлекторные устройства направляют воздушные потоки вентиляторных колес не во внешнее пространство, а только разворачивают их на 180o, т. е. воздушный поток с вентиляторных колес, пройдя направляющее лопастное устройство и дефлектор, снова попадает во всасывающую часть вентиляторного колеса. Таким образом, воздушный поток не выбрасывается за пределы аппарата, он замкнут внутри корпуса устройства, поэтому радиальная реактивная сила не возникает, а следовательно, нельзя гасить колебания груза, управляя вектором этой силы.
Если предположить, что дефлектор все-таки выбрасывает часть воздуха во внешнее пространство и радиальная реактивная сила, действующая на груз, возникает, то тогда должна появиться прецессия подвески вместе с грузом, т. е. канатная подвеска должна описывать конусообразные крутильные колебания вокруг вертикальной оси. Эта прецессия обусловлена циркуляцией радиальной силы, возникающей во время периодического перемещения дефлектора по дуге относительно оси вентиляторного колеса (пункт 15 и др. формулы прототипа).
Цель изобретения - создать устройство, пригодное для гашения колебаний груза на подвеске с одновременным обеспечением управляемого отклонения его по горизонтали в заданном направлении для точной посадки груза на место при проведении строительно-монтажных и других работ.
Это достигается тем, что устройство для гашения колебаний и наводки поднятого краном груза, выполненное в виде корпуса, содержащего вентиляторное колесо с двигателем для его привода, имеет по меньшей мере два горизонтальных кольцевых ряда отверстий, расположенных равномерно по окружности корпуса, предназначенных для всасывания и выброса воздуха, при этом отверстия имеют жалюзи с приводами для их избирательного открытия или закрытия, а управление жалюзи осуществляется микропроцессором, использующим для выработки управляющих команд сигналы датчика углового отклонения груза от вертикали и по азимуту.
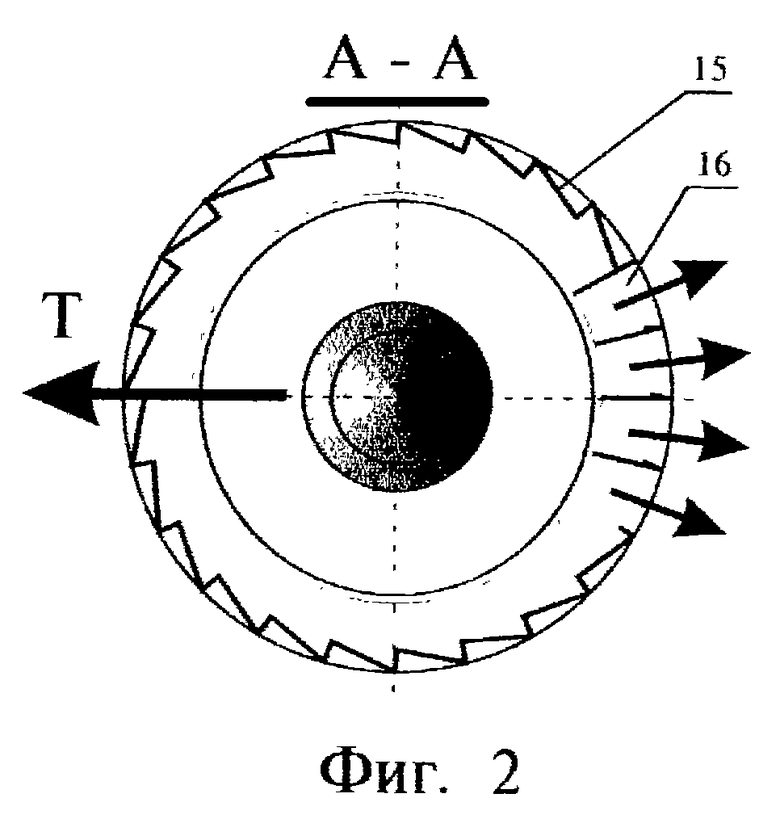
На фиг. 1 показан общий вид устройства. Оно состоит из корпуса 1, кольца 2 для крепления устройства на подвеске крана, грузового крюка 3, кольцевого ряда всасывающих отверстий 4, кольцевого ряда отверстий 5 для выброса воздуха, нескольких детекторов 6 инфракрасного излучения, служащих для приема сигналов ручного пульта управления устройством, механизма поворота 7 груза вокруг вертикальной оси, кабеля 8 для питания электродвигателя 9, являющегося приводом многолопастного вентиляторного колеса 14, поворотных жалюзи 10 и 12, перекрывающих всасывающие и выхлопные отверстия на корпусе аппарата, приводов 11 и 13 для открытия или закрытия жалюзи. На сечении A - A (фиг. 2) показаны закрытые жалюзи 15 и открытые жалюзи 16. Стрелка T показывает направление радиальной силы, действующей на устройство при его работе. На фиг. 3 показано устройство, установленное на подъемном кране, и схема сил, действующих на устройство.
Устройство работает в двух режимах: а) гашение колебаний груза на подвеске; б) наводка груза для посадки в рабочее положение. Поворот груза вокруг вертикальной оси может осуществляться одним из известных устройств (Вайнсон А. А. Подъемно-транспортные машины. - М.: Машиностроение, 1974).
Для гашения колебаний поднятого краном груза устройством в нем осуществляется периодическое изменение направления выброса воздушного потока, создаваемого вентилятором. С этой целью часть воздухозаборных отверстий 4 и часть отверстий 10 для выброса воздуха открываются, при этом отверстия для забора воздуха открываются на диаметрально противоположной стороне от выхлопных отверстий. Таким образом, на устройство действуют две силы. Одна сила создается за счет разрежения на всасывающих отверстиях, другая - за счет реактивной силы от выбрасываемого воздуха, при этом оба вектора суммируются. Автоматическое переключение жалюзи на отверстиях происходит в соответствии с командами микропроцессора, вырабатываемыми по сигналам датчика углового отклонения от вертикали и по азимуту, установленного в устройстве (не показан). Для подавления колебаний груза автоматическое открытие и закрытие жалюзи проводят так, что сила T (фиг. 2) в начале каждого полупериода меняет свое направление на 180o.
Отклонение поднятого краном груза в горизонтальном направлении на некоторое расстояние от вертикали, проходящей через точку подвеса грузового каната, и удержание его в таком положении до точной посадки груза на место производится монтажником с помощью пульта дистанционного управления, имеющего инфракрасный излучатель модулированных сигналов. Эти сигналы принимаются несколькими приемниками 6, расположенными на корпусе устройства. Для точного позиционирования груза устройство, по командам монтажника, смещает его на определенное расстояние в заданном направлении по горизонтали от линии вертикали. На датчике углового отклонения от вертикали появляются сигналы: один из них зависит от угла отклонения, а второй соответствует направлению смешения груза по азимуту. Если в этот момент подать с ручного пульта команду на удержание полученного отклонения, то микропроцессор устройства будет вырабатывать управляющие сигналы для сохранения заданного смещения груза вплоть до его посадки краном на место установки.
Расчеты показывают, что для привода вентиляторного колеса диаметром 0,4 м с целью получения тяги 700 H необходим двигатель мощностью 9 кВт. Быстроходные двигатели такой мощности имеют относительно небольшую массу. В таблице показаны возможные пределы отклонения положения груза различной массы в одну сторону относительно вертикали, проходящей через точку подвеса грузового каната, с помощью устройства мощностью 9 кВт и тягой 700 кН.
Пределы регулирования положения грузозахватного приспособления без груза в несколько раз выше, т.к. в этом случае необходимо отклонять в заданное положение лишь само устройство с крюковой подвеской. Это позволяет сократить время ручных операций не только при установке грузов в заданное положение, но и при взятии их с грузовой площадки.
Проведенные расчеты подтверждают, что устройство работоспособно и поставленная в изобретении цель достигается.
Источники информации.
1. Авт. св. N 1031880 A, кл. B 66 C 13/06, 1977.
2. Авт. св. N 285654, кл. B 66 C 13/04, 1967 (Приоритет 1967 г. по патентам Швеции) - (ПРОТОТИП).


Устройство для гашений колебаний и наводки поднятого краном груза, выполненное в виде корпуса, содержащего вентиляторное колесо с двигателем для его привода, имеет по меньшей мере два горизонтальных кольцевых ряда отверстий, расположенных равномерно по окружности корпуса, предназначенных для всасывания и выброса воздуха, при этом отверстия имеют жалюзи с приводами для их избирательного открытия или закрытия, а управление жалюзи осуществляется микропроцессором, использующим для выработки управляющих команд сигналы датчика углового отклонения груза от вертикали и по азимуту, что позволяет гасить колебания груза на подвеске с одновременным обеспечением управляемого отклонения его по горизонтали в заданном направлении для точной посадки груза на место при проведении строительно-монтажных и других работ. 3 ил., 1 табл.
Устройство для гашения колебаний и наводки поднятого краном груза, выполненное в виде корпуса, содержащего вентиляторное колесо с двигателем для его привода, отличающееся тем, что устройство имеет по меньшей мере два горизонтальных кольцевых ряда отверстий, расположенных равномерно по окружности корпуса, предназначенных для всасывания и выброса воздуха, при этом все или большая часть отверстий имеют жалюзи с приводами для их избирательного открытия или закрытия, а управление жалюзи осуществляются микропроцессором, использующим для выработки управляющих команд сигналы датчика углового отклонения груза от вертикали и по азимуту.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, N 1031880, A1, 23.07.83 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, N 285654, A1, 08.12.70 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| GB, N 1565259, A1, 15.04.80 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US, N 3743107, A1, 03.07.73. | |||
