Изобретение относится к системам централизованной радиоохраны и может быть использовано для борьбы с угонами транспортных средств (ТС).
Известна радиоканальная система тревожной сигнализации для централизованной охраны ТС, объектов недвижимости, людей и животных по патенту RU №2182088, В 60 R 25/00, которая содержит установленные на ТС блоки охранных извещателей, связанные с объектовыми оконечными устройствами, имеющими антенны для связи по радиоэфиру, а также центр сбора и обработки информации, имеющий пультовое оконечное устройство с антенной пультового оконечного устройства для связи по радиоэфиру и пульт централизованного наблюдения (ПЦН), в состав которого входят связанные друг с другом плата адаптера ввода информации, соединенная с пультовым оконечным устройством, процессор обработки информации, блок обработки и отображения картографической и семантической информации и принтер с адаптером принтера, вход которого соединен с процессором обработки информации, выполненным с возможностью подключения к блоку обработки и отображения картографической и семантической информации и с возможностью вывода информации на адаптер принтера. При этом ПЦН выполнен с возможностью автоматического контроля исправности радиоканала посредством отслеживания периодического поступления извещений от каждого объектового оконечного устройства, связь по радиоэфиру выполнена в виде микросотовой сети передачи данных (МСПД), содержащей установленные на местности базовые станции и ретрансляторы, выполненные с возможностью приема кодовых сообщений от объектовых оконечных устройств, селекции и ретрансляции указанных сообщений на ближайшие базовую станцию или ретранслятор.
Недостатками указанной радиоканальной системы являются высокая стоимость и сложность установки на местности и объектах городской инфраструктуры большого количества излучающих радиоэлектронных средств (РЭС).
Это объясняется тем, что отведенный для гражданского применения частотный ресурс весьма ограничен и для развертывания МСПД необходимо получать в органах Минсвязи России соответствующие разрешения. Причем с увеличением требуемого для непрерывного покрытия территории количества наземных базовых и ретрансляционных станций все сложнее становится выполнить условия электромагнитной совместимости с другими РЭС. Серьезной проблемой, особенно для таких крупных городов, как Москва и Санкт-Петербург, является и отвод земельных участков под указанные станции.
Указанные недостатки присущи, хотя и в меньшей степени, и радиоканальной системе по патенту RU №2198800, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00, серийно выпускаемой предприятием-заявителем под торговой маркой CarNet (Каталог "Системы радиосвязи", ООО "Альтоника", 2003/2004).
Указанная система содержит размещенные на охраняемых ТС установки охранной сигнализации, выполненные с возможностью определения состояния охраняемых ТС и изменений этих состояний, формирования и передачи извещений о состоянии охраняемых ТС и извещений об изменениях этих состояний по МСПД и по стандартной сотовой сети подвижной связи, например по GSM-сети, а также территориально распределенные ретрансляционные узлы МСПД, выполненные с возможностью приема извещений от установок охранной сигнализации, селекции указанных извещений и ретрансляции их по радиоэфиру и/или по проводным каналам связи, а также центр сбора и обработки информации, содержащий пультовое оконечное устройство, связанное через центральный радиомодем со стандартной сотовой сетью подвижной связи, и ПЦН, включающий в себя адаптер ввода информации, выполненный с возможностью приема сообщений из телефонной сети, и подключенный к нему процессор обработки информации, выходы которого подключены соответственно к блоку обработки и отображения картографической и семантической информации и к принтеру.
Недостатком указанной радиоканальной системы является ее низкая помехоустойчивость, обусловленная применением сигнала малой мощности (до 5 мВт) с известной детерминированной структурой. Дополнение МСПД стандартной сотовой сетью подвижной связи, например GSM-сетью, для уменьшения капитальных затрат на создание специализированной сети ретрансляторов и базовых станций не устраняет указанный недостаток, поскольку стандартные сети сотовой связи также весьма уязвимы по отношению к преднамеренным (умышленным) помехам, которые может применить злоумышленник.
Возможность применения таких помех стала реальностью после поступления на коммерческий рынок малогабаритных джаммеров - постановщиков умышленных помех стандартным сотовым сетям подвижной связи. Так, согласно рекламной информации израильской фирмы NetLine, серийно выпускаемый этой фирмой джаммер C-Guard LP способен блокировать сотовую связь для практически всех используемых в настоящее время стандартов. При средней мощности излучения (5-50) мВт и массе не более 0,6 кг этот джаммер обеспечивает эффективное блокирование абонентских терминалов стандартных сотовых сетей подвижной связи в радиусе (5-80) м вокруг себя.
Пример использования на практике средств глушения GSM-канала при угоне ТС приведен, например, в журнале "Мастер 12 Вольт", август-сентябрь 2004, с.82.
Для увеличения зоны действия и повышения помехоустойчивости вышеуказанной системы в патенте RU №2231458, В 60 R 25/00, G 08 В 25/10 предложено использовать два нововведения: воздушные носители - привязные аэростаты или дирижабли - для установки на них базовых станций и узкополосный сигнал с "прыгающими" несущими частотами - так называемый hopping-сигнал (патент RU №2228275, В 60 R 25/10, G 08 В 25/10, G 08 В 29/16), защищенный товарным знаком "HOPPING" (свидетельство №264485 от 01.03.04 на имя предприятия-заявителя). Платой за одновременное расширение зоны действия системы и повышение ее помехоустойчивости является некоторое усложнение и, соответственно, удорожание приемной части аппаратуры, в которой осуществляется достаточно тонкая (на основе быстрого преобразования Фурье) обработка сигналов. Однако, учитывая, что количество приемников hopping-сигналов в системе несоизмеримо меньше количества передатчиков hopping-сигналов, вклад указанного увеличения стоимости приемников в стоимость всей системы невелик.
Указанная радиоканальная система сбора и обработки информации для централизованной охраны выбрана в качестве прототипа заявленного технического решения.
Она содержит установки охранной сигнализации, каждая из которых включает в себя блок охранных извещателей, выходы которого подключены ко входам объектового оконечного устройства, выполненного с возможностью использования радиоканала, связанные друг с другом блок управления противоугонной системой, входы которого подключены к выходам блока охранных извещателей, и радиомодем, связанный со стандартной сетью фиксированной или подвижной сухопутной радиослужбы, центр сбора и обработки информации, содержащий пультовое оконечное устройство, связанное через центральный радиомодем со стандартной сетью фиксированной или подвижной сухопутной радиослужбы, ПЦН, содержащий связанные друг с другом блок первичной обработки информации, выход которого подключен ко входу блока вторичной обработки, отображения и регистрации картографической и семантической информации, связанному с одним или несколькими пунктами централизованной охраны, подключенными к телефонной сети, и адаптер ввода информации, связанный с пультовым оконечным устройством и подключенный через телефонную сеть к выходам телефонных объектовых оконечных устройств, а также базовые станции, выполненные с возможностью приема кодовых сообщений от установок охранной сигнализации, селекции указанных сообщений и передачи их по радиоканалу и/или по телефонной сети в центр сбора и обработки информации, при этом объектовые оконечные устройства установок охранной сигнализации выполнены с передатчиками hopping-сигналов, в состав центра сбора и обработки информации введен приемник hopping-сигналов, выход которого подключен к пультовому оконечному устройству, а базовая станция выполнена в виде ретранслятора hopping-сигналов, бортовая часть ретранслятора hopping-сигналов установлена на привязном аэростатном носителе, заполненном газом, плотность которого меньше плотности воздуха, и связана с помощью кабеля-троса и лебедки для кабеля-троса с наземной частью ретранслятора hopping-сигналов, бортовая часть ретранслятора hopping-сигналов содержит блок датчиков полетных параметров, а также приемник hopping-сигналов, выход которого соединен со входом блока анализа, выходы которого соединены со входами радиоканального оконечного устройства ретранслятора hopping-сигналов, наземная часть ретранслятора hopping-сигналов содержит блок питания, контроля и управления полетными параметрами, первый вход которого подключен к пульту централизованной охраны, первый выход - к управляющему входу лебедки для кабеля-троса, а второй выход - к первому входу телефонного оконечного устройства ретранслятора hopping-сигналов, выполненного с возможностью приема на свой второй вход сообщений по кабелю-тросу из блока анализа и с возможностью передачи данных через телефонную сеть на адаптер ввода информации, при этом выход блока датчиков полетных параметров подключен ко второму входу блока питания, контроля и управления полетными параметрами с помощью кабеля-троса, выполненного с возможностью подачи по нему электрического питания от блока питания, контроля и управления полетными параметрами на бортовую часть ретранслятора hopping-сигналов.
Необходимая для перехвата угнанных ТС (УТС) силами быстрого реагирования точность определения текущего местоположения УТС достигается путем включения в состав его бортовой аппаратуры высокоточного GPS-приемника, обеспечивающего прием и обработку сигналов глобальной спутниковой системы радионавигации (например, патенты RU №2225302, В 60 R 25/00, G 08 В 25/08, RU №2228542, G 08 G 1/123, В 60 R 25/00 и др.).
Однако и такое техническое решение имеет свои недостатки. Дело в том, что для обеспечения приемлемой точности определения местоположения УТС GPS-приемник должен всегда находиться в зоне уверенного приема сигналов глобальной спутниковой навигации одновременно от нескольких (не менее четырех) спутников, что в городских условиях трудновыполнимо. Во-первых, на прохождение спутниковых сигналов влияет затенение, особенно в районах высотной застройки. Во-вторых, угонщики могут использовать преднамеренные помехи приему сигналов GPS-приемником (глушение GPS-приемника).
Предметом настоящего изобретения является система для поиска и перехвата УТС, содержащая расположенную на борту УТС установку охранной сигнализации, выполненную с возможностью приема сигналов глобальной спутниковой системы радионавигации и определения текущего местоположения УТС, а также с возможностью излучения и приема сигналов стандартной сотовой сети подвижной связи и излучения сигналов с прыгающей несущей частотой - hopping-сигналов, содержащих кодовые сообщения об идентификационных признаках данного УТС и о его текущем местоположении, распределенные в пределах контролируемой территории аэростатные подсистемы, каждая из которых состоит из связанных друг с другом посредством кабеля-троса воздушного комплекса наблюдения, размещенного на борту аэростатного носителя и включающего в себя ретранслятор hopping-сигналов, излучаемых установками охранной сигнализации, и блок контроля полетных параметров с подключенными к нему датчиками, а также наземного комплекса с лебедкой для кабеля-троса, обеспечивающего подачу на борт аэростатного носителя электропитания и прием с борта аэростатного носителя сигналов контроля полетных параметров, центр сбора и обработки информации, выполненный с возможностью приема ретранслированных аэростатной подсистемой hopping-сигналов, селекции и обработки кодовых сообщений и отображения результатов указанной обработки в виде отметок УТС, перемещающихся на фоне карты-схемы улично-дорожной сети, измерения текущего местоположения УТС, формирования и передачи на пункты централизованной охраны кодовых сообщений об идентификационных признаках и текущем местоположении УТС на улично-дорожной сети для формирования целеуказаний силам быстрого реагирования, а также с возможностью передачи по радиоэфиру, либо по проводным каналам связи в наземные комплексы аэростатных подсистем команд управления полетными параметрами аэростатного носителя, - при этом в состав воздушного комплекса наблюдения введены видеокамера с механизмом стабилизации и управления ориентацией, блок управления видеокамерой и последовательно соединенные блок компрессии видеоизображений, вход которого подключен к выходу видеокамеры, и передатчик видеоизображений, выполненный с возможностью передачи по радиоэфиру с борта аэростатного носителя в центр сбора и обработки информации подвергнутых компрессии видеоизображений, при этом блок управления видеокамерой связан с механизмом стабилизации и управления ориентацией и с видеокамерой, а его выход подключен к блоку контроля полетных параметров, при этом центр сбора и обработки информации выполнен с возможностью геометрических и амплитудных преобразований указанных видеоизображений и совмещения их с соответствующими фрагментами карты-схемы улично-дорожной сети, а также с возможностью поиска, обнаружения и идентификации УТС, соответствующих полученным кодовым сообщениям, уточнения местоположения этих УТС относительно элементов улично-дорожной сети и коррекции данных, передаваемых в пункты централизованной охраны.
Частными существенными признаками изобретения являются следующие.
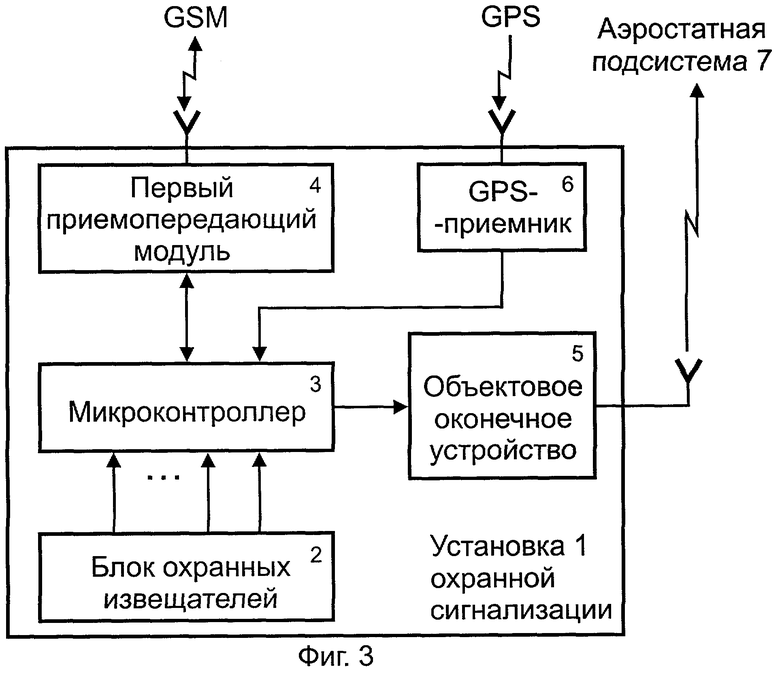
Установка охранной сигнализации содержит блок охранных извещателей, микроконтроллер, GPS-приемник, выполненный с возможностью приема и обработки сигналов глобальных спутниковых систем радионавигации, первый приемопередающий модуль, выполненный с возможностью приема и передачи сообщений по стандартной сотовой сети подвижной связи, и объектовое оконечное устройство, выполненное с возможностью излучения hopping-сигналов, вход которого подключен к выходу микроконтроллера, а выход является антенным выходом установки охранной сигнализации, предназначенным для излучения hopping-сигналов, при этом микроконтроллер связан с первым приемопередающим модулем, вход микроконтроллера подключен к выходу GPS-приемника, а многоканальный вход соединен с многоканальным выходом блока охранных извещателей.
Центр сбора и обработки информации содержит приемник hopping-сигналов, второй приемопередающий модуль, выполненный с возможностью приема и передачи сообщений по стандартной сотовой сети подвижной связи, пультовое оконечное устройство, приемник видеоизображений, блок преобразования видеоизображений, блок вторичной обработки и отображения картографической, семантической и видеоинформации и пульт централизованного наблюдения, содержащий последовательно соединенные адаптер ввода информации и блок первичной обработки информации, выход которого подключен к первому входу блока вторичной обработки и отображения картографической, семантической и видеоинформации, выход которого подключен к первому входу пультового оконечного устройства и выполнен с возможностью подключения к территориально распределенной сети пунктов централизованной охраны, при этом выход приемника hopping-сигналов подключен ко второму входу пультового оконечного устройства, которое выполнено с возможностью передачи сообщений на оконечные устройства наземных комплексов территориально распределенных аэростатных подсистем, и связано со вторым приемопередающим модулем, а первый и второй выходы пультового оконечного устройства соединены соответственно со вторым входом блока вторичной обработки и отображения картографической, семантической и видеоинформации и со входом адаптера ввода информации, входящего в состав пульта централизованного наблюдения, а выход приемника видеоизображений через блок преобразования видеоизображений подключен к видеовходу блока вторичной обработки и отображения картографической, семантической и видеоинформации.
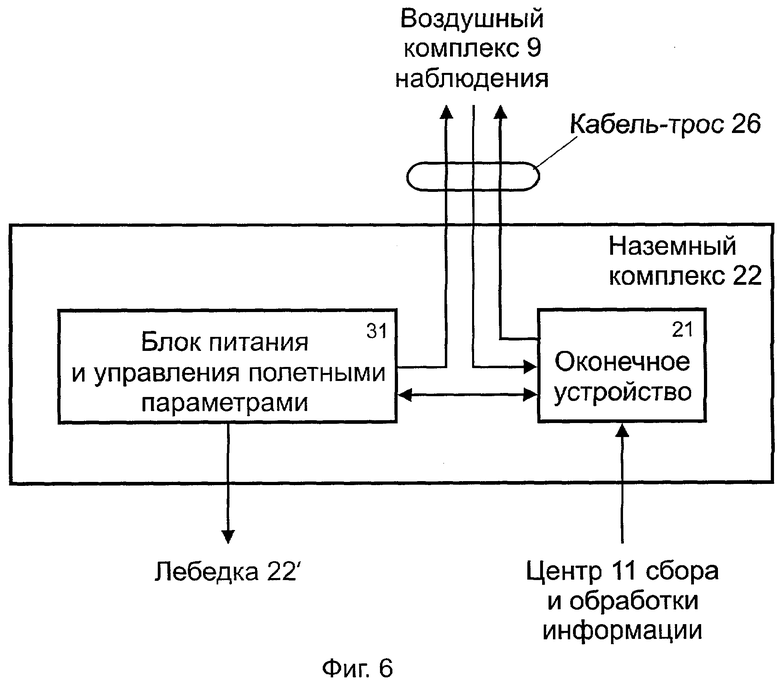
Наземный комплекс содержит связанные друг с другом оконечное устройство и блок питания и управления полетными параметрами, выполненный с возможностью подачи команд на лебедку и с возможностью подачи по кабелю-тросу электропитания в расположенный на борту аэростатного носителя воздушный комплекс наблюдения, оконечное устройство выполнено с возможностью приема по первому входу сообщений из центра сбора и обработки информации, а второй вход и выход оконечного устройства подключены по кабелю-тросу соответственно к выходу блока контроля полетных параметров и ко входу блока управления видеокамерой.
Задачей настоящего изобретения является создание системы для поиска и перехвата УТС, обеспечивающей более эффективный, чем система-прототип, перехват УТС.
Обеспечиваемый технический результат заключается в повышении точности определения местоположения УТС в условиях нарушений устойчивого приема сигналов глобальной спутниковой системы радионавигации, вызванных влиянием высотной застройки и/или применением угонщиками преднамеренных помех. Указанный результат достигается за счет введения в состав воздушного комплекса наблюдения, устанавливаемого на борту аэростатного носителя, видеокамеры наблюдения и использования получаемых с борта аэростатного носителя видеоизображений УТС и прилегающих участков улично-дорожной сети для "привязки" отметки УТС к карте-схеме контролируемой городской территории. Это позволяет обеспечить приемлемую точность определения местоположения УТС относительно элементов улично-дорожной сети (домов, перекрестков и других опорных ориентиров) даже в случае глушения GPS-приемника злоумышленниками при движении УТС по улично-дорожной сети.
Сущность изобретения поясняется на фиг.1-6.
Фиг.1 иллюстрирует концепцию построения предлагаемой системы.
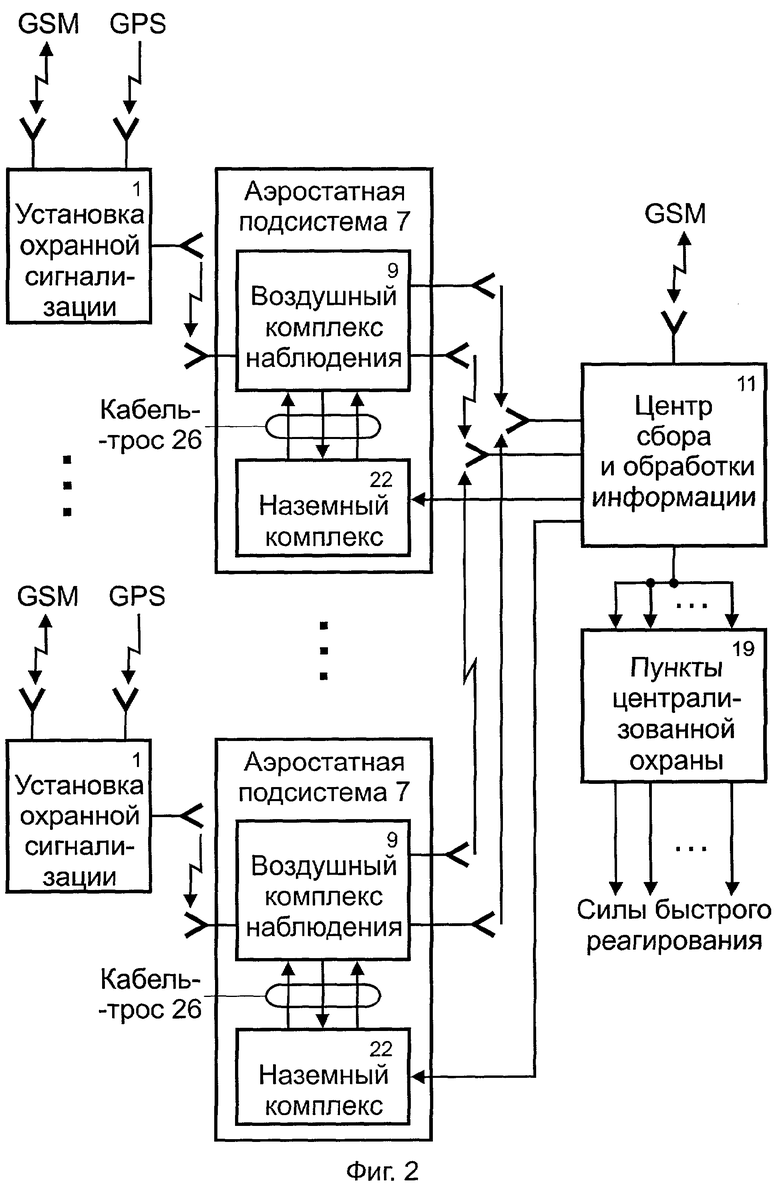
На фиг.2 показана общая структурная схема системы.
На фиг.3 представлена структурная схема установки охранной сигнализации.
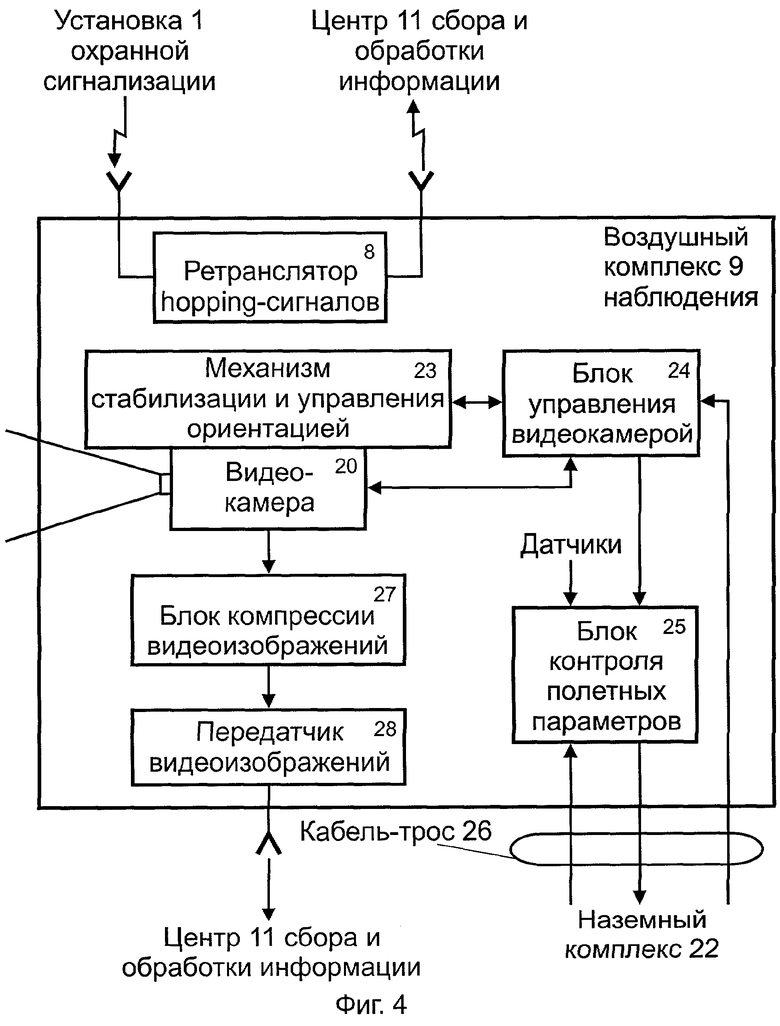
На фиг.4 показана структурная схема воздушного комплекса наблюдения.
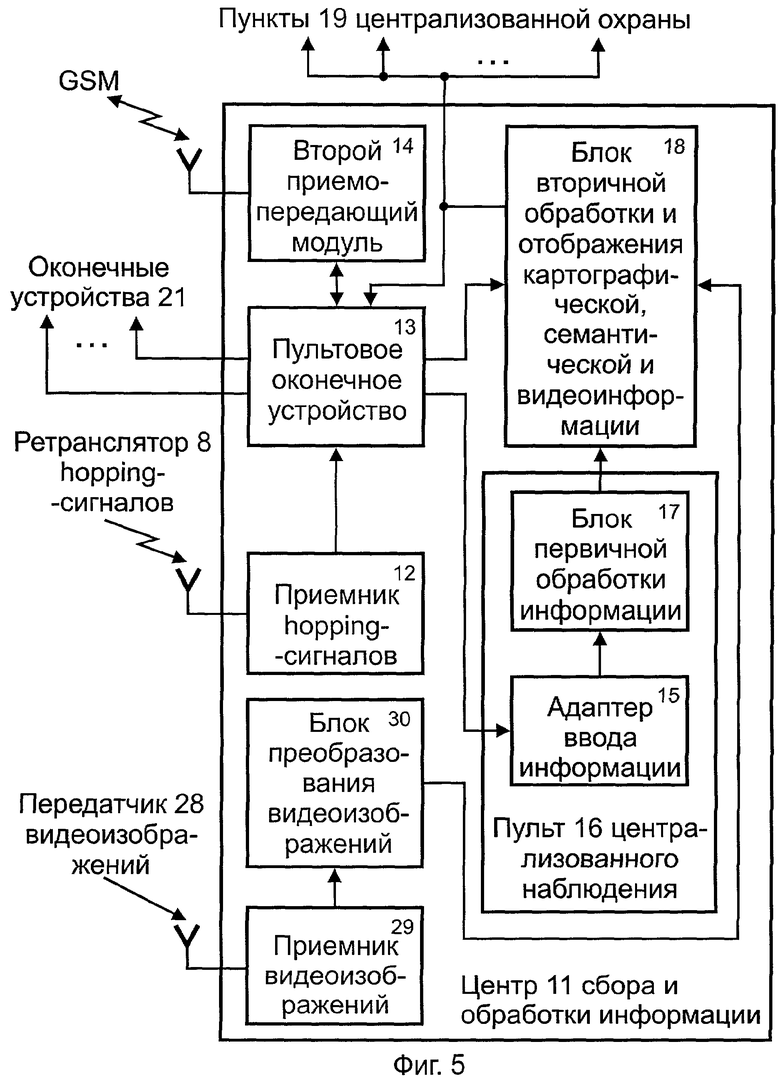
На фиг.5 показана структурная схема центра сбора и обработки информации.
На фиг.6 показана структурная схема наземного комплекса.
На фиг.1-6 использованы следующие обозначения: 1 - установка охранной сигнализации; 2 - блок охранных извещателей; 3 - микроконтроллер; 4 - первый приемопередающий модуль; 5 - объектовое оконечное устройство; 6 - GPS-приемник; 7 - аэростатная подсистема; 8 - ретранслятор hopping-сигналов; 9 - воздушный комплекс наблюдения; 10 - аэростатный носитель; 11 - центр сбора и обработки информации; 12 - приемник hopping-сигналов; 13 - пультовое оконечное устройство; 14 - второй приемопередающий модуль; 15 - адаптер ввода информации; 16 - ПЦН; 17 - блок первичной обработки информации; 18 - блок вторичной обработки и отображения картографической, семантической и видеоинформации; 19 - пункты централизованной охраны; 20 - видеокамера; 21 - оконечное устройство; 22 - наземный комплекс; 22' - лебедка; 23 - механизм стабилизации и управления ориентацией; 24 - блок управления видеокамерой; 25 - блок контроля полетных параметров; 26 - кабель-трос; 27 - блок компрессии видеоизображений; 28 - передатчик видеоизображений; 29 - приемник видеоизображений; 30 - блок преобразования видеоизображений; 31 - блок питания и управления полетными параметрами.
Рассматриваемая система для поиска и перехвата УТС содержит расположенную на борту УТС установку 1 охранной сигнализации, выполненную с возможностью приема сигналов глобальной спутниковой системы радионавигации и определения текущего местоположения УТС, а также с возможностью излучения и приема сигналов по стандартной сотовой сети подвижной связи и излучения сигналов с прыгающими несущими частотами - hopping-сигналов, содержащих кодовые сообщения об идентификационных признаках данного УТС и о его текущем местоположении.
Каждая установка 1 охранной сигнализации (фиг.3) содержит блок 2 охранных извещателей с многоканальным выходом, микроконтроллер 3, первый приемопередающий модуль 4, связанный со стандартной сотовой сетью подвижной связи, объектовое оконечное устройство 5 и GPS-приемник 6. Объектовое оконечное устройство 5 выполнено с возможностью излучения hopping-сигналов, его вход подключен к выходу микроконтроллера 3, а выход является антенным выходом установки 1 охранной сигнализации, предназначенным для излучения hopping-сигналов. Микроконтроллер 3 связан с первым приемопередающим модулем 4, вход микроконтроллера 3 подключен к выходу GPS-приемника 6, а многоканальный вход - к многоканальному выходу блока 2 охранных извещателей.
Рассматриваемая система содержит, кроме того, распределенные в пределах контролируемой территории аэростатные подсистемы 7. Каждая из аэростатных подсистем 7 состоит из воздушного комплекса 9 наблюдения и наземного комплекса 22. Воздушный комплекс 9 наблюдения расположен на борту аэростатного носителя 10 и связан с наземным комплексом 22 с помощью кабеля-троса 26, на который воздействует лебедка 22', входящая в состав наземного комплекса 22. При этом воздушный комплекс 9 наблюдения выполнен с возможностью ретрансляции hopping-сигналов, излучаемых установками 1 охранной сигнализации. Указанная возможность реализована с помощью ретранслятора 8 hopping-сигналов, входящего в состав воздушного комплекса 9 наблюдения.
В состав воздушного комплекса 9 наблюдения (фиг.4) введены:
- видеокамера 20 с механизмом 23 стабилизации и управления ориентацией;
- блок 24 управления видеокамерой;
- последовательно соединенные блок 27 компрессии видеоизображений, вход которого подключен к выходу видеокамеры 20, и передатчик 28 видеоизображений, выполненный с возможностью передачи по радиоэфиру с борта аэростатного носителя 10 в центр 11 сбора и обработки информации видеоизображений, подвергнутых компрессии.
Кабель-трос 26, связывающий аэростатный носитель 10, на борту которого находится воздушный комплекс 9 наблюдения, с наземным комплексом 22, обеспечивает полет аэростатного носителя 10 на заданной высоте и подачу из блока 31 питания и управления полетными параметрами на борт аэростатного носителя 10 электропитания и команд управления полетными параметрами. Кроме того, кабель-трос 26 также обеспечивает прием с борта аэростатного носителя 10 (из блока 25 контроля полетных параметров) в оконечное устройство 21 сигналов контроля полетных параметров.
Центр 11 сбора и обработки информации (фиг.5) выполнен с возможностями:
- приема ретранслированных аэростатной подсистемой 7 hopping-сигналов;
- селекции и обработки кодовых сообщений и отображения результатов указанной обработки в виде отметок УТС, перемещающихся на фоне карты-схемы улично-дорожной сети;
- измерения текущего местоположения УТС;
- формирования и передачи в пункты 19 централизованной охраны кодовых сообщений об идентификационных признаках и текущем местоположении УТС на улично-дорожной сети для формирования целеуказаний силам быстрого реагирования;
- проведения геометрических и амплитудных преобразований видеоизображений, переданных с борта аэростатного носителя 10;
- совмещения указанных видеоизображений с соответствующими фрагментами карты-схемы улично-дорожной сети путем "привязки" к опорным ориентирам;
- поиска, обнаружения и идентификации УТС, соответствующих полученным кодовым сообщениям;
- уточнения местоположения этих УТС относительно элементов улично-дорожной сети и коррекции данных, передаваемых в пункты 19 централизованной охраны для формирования целеуказаний силам быстрого реагирования.
Для реализации вышеуказанных функций центр 11 сбора и обработки информации содержит:
- приемник 12 hopping-сигналов;
- второй приемопередающий модуль 14 стандартной сотовой сети подвижной связи;
- приемник 29 видеоизображений;
- блок 18 вторичной обработки и отображения картографической, семантической и видеоинформации;
- ПЦН 16, содержащий последовательно соединенные адаптер 15 ввода информации и блок 17 первичной обработки информации.
Выход блока 17 первичной обработки информации подключен к блоку 18 вторичной обработки и отображения картографической, семантической и видеоинформации, выполненному с возможностью подключения к территориально распределенной сети пунктов 19 централизованной охраны. Выход приемника 12 hopping-сигналов подключен к одному из входов пультового оконечного устройства 13, которое связано со вторым приемопередающим модулем 14. Соответствующие выходы пультового оконечного устройства 13 подключены к адаптеру 15 ввода информации и к блоку 18 вторичной обработки и отображения картографической, семантической и видеоинформации. Другие выходы пультового оконечного устройства соединены со входами соответствующих оконечных устройств 21, входящих в состав наземных комплексов 22 территориально распределенных аэростатных подсистем 7. Выход приемника 29 видеоизображений через блок 30 преобразования видеоизображений подключен к видеовходу блока 18 вторичной обработки и отображения картографической, семантической и видеоинформации.
Наземный комплекс 22 (фиг.6) содержит связанные друг с другом оконечное устройство 21 и блок 31 питания и управления полетными параметрами, подключенный по кабелю-тросу 26 к соответствующему входу блока 25 контроля полетных параметров, расположенного на борту аэростатного носителя 10. При этом оконечное устройство 21 выполнено с возможностью приема данных из центра 11 сбора и обработки информации и имеет вход и выход, предназначенные соответственно для подключения по кабелю-тросу 26 к выходу блока 25 контроля полетных параметров и ко входу блока 24 управления видеокамерой.
Блок 2 охранных извещателей, входящий в состав установки 1 охранной сигнализации (фиг.3), представляет собой типовое техническое средство охранной сигнализации, предназначенное для обнаружения несанкционированного проникновения на охраняемый объект. Роль охранных извещателей могут играть датчики охранной сигнализации (датчики объема, движения, концевые выключатели и др.), а также любые контрольно-измерительные приборы, позволяющие определять состояние охраняемых объектов и изменения этих состояний и выполненные с возможностью подключения к микроконтроллеру 3 ("Справочник инженерно-технических работников и электромонтеров технических средств охранно-пожарной сигнализации", Москва, МВД, ГУВО, 1997).
Объектовое оконечное устройство 5 может быть создано на базе серийно выпускаемого предприятием-заявителем передатчика hopping-сигналов "РИФ СТРИНГ RS-202TP" либо соответствующего узла известной радиоохранной системы, информация о которой представлена в Интернете на сайте предприятия-разработчика  . Информация об этом узле приведена также в описаниях патентов RU №2216463, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00; RU №2220859, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00; RU №2228860, В 60 R 25/00, G 08 C 25/10. Формат данных, передаваемых объектовым оконечным устройством 5 на базе передатчика hopping-сигналов "РИФ СТРИНГ RS-202TP", задается программным путем. Дальность его действия составляет, в зависимости от условий распространения радиоволн, от 5 до 10 км.
. Информация об этом узле приведена также в описаниях патентов RU №2216463, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00; RU №2220859, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00; RU №2228860, В 60 R 25/00, G 08 C 25/10. Формат данных, передаваемых объектовым оконечным устройством 5 на базе передатчика hopping-сигналов "РИФ СТРИНГ RS-202TP", задается программным путем. Дальность его действия составляет, в зависимости от условий распространения радиоволн, от 5 до 10 км.
Для передачи извещений в рассматриваемой системе, как и в системе-прототипе, используется стандартная сотовая сеть подвижной связи, например стандарта GSM, терминалами которой являются установленный на УТС первый приемопередающий модуль 4 и расположенный в центре 11 сбора и обработки информации второй приемопередающий модуль 14. Они могут быть выполнены, например, на базе GSM-модуля ТС35 Terminal компании Siemens. В серийно выпускаемом предприятием-заявителем терминальном оборудовании сотовой подвижной связи "REEF GSM-2000" (сертификат соответствия №РОСС RU.ME30.B.01155) этот GSM-модуль состыкован с микроконтроллером 3 и обеспечивает возможность передачи по GSM-сети на второй приемопередающий модуль 14 кодовых сообщений, сформированных микроконтроллером 3, в соответствии с информацией, поступающей из блока 2 охранных извещателей. В обратном направлении, из центра 11 сбора и обработки информации, в котором установлен второй приемопередающий модуль 14, по GSM-сети могут передаваться команды управления микроконтроллером 3, в частности команды, обеспечивающие блокирование движения УТС.
GPS-приемник 6, подключенный к микроконтроллеру 3, присутствует в другой модели терминального оборудования сотовой сети подвижной связи "REEF GSM-3000", также серийно выпускаемой предприятием-заявителем (сертификат соответствия №РОСС RU.ME30.B.01155). Это техническое решение позволяет автономно на борту УТС измерять его текущие координаты и передавать их в центр 11 сбора и обработки информации в составе кодового сообщения - по GSM-сети либо, посредством объектового оконечного устройства 5 - через один из ретрансляторов 8 hopping-сигналов.
В качестве ПЦН 16, который является одним из ключевых элементов центра 11 сбора и обработки информации, может использоваться блок "RS-200P" (или "RS-202P"). Эти блоки серийно выпускаются предприятием-заявителем (например, Каталог "Радиоканальные охранные системы", 000 "Альтоника", 2003) и предназначены для применения в системах централизованной радиоохраны различных объектов недвижимости (торговых павильонов, складов, гаражей, дач и т.п.).
ПЦН 16 содержит блок 17 первичной обработки информации (на базе цифрового процессора), выход которого подключен к блоку 18 вторичной обработки и отображения картографической, семантической и видеоинформации, а также стандартный адаптер 15 ввода информации, предназначенный для обеспечения связи с пультовым оконечным устройством 13.
При реализации центра 11 сбора и обработки информации, в качестве другого его ключевого элемента - блока 18 вторичной обработки и отображения картографической, семантической и видеоинформации - может быть использован программно-аппаратный комплекс "Геобилдер®", серийно выпускаемый фирмой ПК "Геокибернетика" (сертификат соответствия №РОСС RU.KP02.C00014).
Программно-аппаратный комплекс "Геобилдер" представляет собой автоматизированное рабочее место оператора с развитым программным обеспечением, реализующим технологию географической информационной системы (ГИС-технологию), позволяющей совмещать и отображать на одном экране векторную картографическую, семантическую и растровую видеоинформацию. Описание и принципы функционирования программно-аппаратного комплекса "Геобилдер" представлены в рекламном материале "Комплекс программных средств GeoBuilder", 2002 и на сайте предприятия-производителя 
Аэростатная подсистема 7, состоящая из воздушного комплекса 9 наблюдения и наземного комплекса 22 с лебедкой 22' и кабелем-тросом 26, выпускается воздухоплавательным центром "АВГУР"  Воздушный комплекс 9 наблюдения установлен на борту привязного аэростатного носителя 10, заполненного газом, плотность которого ниже плотности воздуха, и связан с помощью кабеля-троса 26 с наземным комплексом 22.
Воздушный комплекс 9 наблюдения установлен на борту привязного аэростатного носителя 10, заполненного газом, плотность которого ниже плотности воздуха, и связан с помощью кабеля-троса 26 с наземным комплексом 22.
За исключением ретранслятора 8 hopping-сигналов вся остальная часть бортовой аппаратуры аэростатной подсистемы 7, показанной на фиг.4, входит в состав системы видеонаблюдения, разработанной в настоящее время воздухоплавательным центром "АВГУР" для управления движением в Москве (сообщение в газете "Округа. Северо-Запад". 13.12.2003). Сама аэростатная подсистема 7 аналогична аппаратуре воздушного видеонаблюдения и обработки данных комплекса с дистанционно пилотируемым летательным аппаратом "Пчела 1", серийно выпускаемого предприятием НИИ "Кулон", Москва (например, рекламные материалы предприятия "Рособоронэкспорт"  Она содержит установленные на борту беспилотного летательного аппарата блок контроля полетных параметров, видеокамеру с механизмом стабилизации и управления ориентацией и блоком управления видеокамерой, последовательно соединенные блок компрессии видеоизображений и передатчик видеоизображений, а также установленные в центре сбора и обработки информации приемник видеоизображений, который через блок преобразования видеоизображений подключен к блоку вторичной обработки и отображения картографической, семантической и видеоинформации. Требуемое качество передаваемого видеоизображения при ограниченной пропускной способности радиоканала обеспечивается, например, с помощью JPEG-преобразования, достаточно полно описанного, например, в книге Дж.Миано "Форматы и алгоритмы сжатия изображений в действии", "Триумф", Москва, 2003.
Она содержит установленные на борту беспилотного летательного аппарата блок контроля полетных параметров, видеокамеру с механизмом стабилизации и управления ориентацией и блоком управления видеокамерой, последовательно соединенные блок компрессии видеоизображений и передатчик видеоизображений, а также установленные в центре сбора и обработки информации приемник видеоизображений, который через блок преобразования видеоизображений подключен к блоку вторичной обработки и отображения картографической, семантической и видеоинформации. Требуемое качество передаваемого видеоизображения при ограниченной пропускной способности радиоканала обеспечивается, например, с помощью JPEG-преобразования, достаточно полно описанного, например, в книге Дж.Миано "Форматы и алгоритмы сжатия изображений в действии", "Триумф", Москва, 2003.
Предлагаемый к установке на борту аэростатного носителя 10 ретранслятор 8 hopping-сигналов реализован предприятием-заявителем в рамках НИОКР "Карнет-3" и прошел натурные испытания в Московском регионе в 2003 году. Принципы его построения подробно описаны в ранее полученных предприятием-заявителем патентах на изобретения RU №2228860, В 60 R 25/00, G 08 В 25/10, RU №2228861, В 60 R 25/00, G 08 В 25/08.
Другие блоки и узлы, используемые в рассматриваемый системе, представляют собой стандартные изделия электронно-вычислительной техники, применяемые в серийно выпускаемых РЭС.
В соответствии с вышеизложенным возможность практической реализации заявленного технического решения не вызывает сомнений.
Рассматриваемая система для поиска и перехвата УТС (фиг.1 и 2) работает следующим образом.
При угоне ТС в расположенной на его борту установке 1 охранной сигнализации (фиг.3) срабатывают один или несколько датчиков (объема, движения и т.п.), входящих в состав блока 2 охранных извещателей, и формируются тревожные извещения. С соответствующих каналов (шлейфов) многоканального выхода блока 2 охранных извещателей эти тревожные извещения поступают в соответствующие каналы многоканального входа микроконтроллера 3.
Микроконтроллер 3 формирует соответствующее тревожное сообщение, в котором содержатся идентификационные признаки данного УТС (например, марка, государственный номер, цвет, фамилия владельца и т.п.), и номер датчика в блоке 2 охранных извещателей, срабатывание которого привело к появлению тревожного извещения. Микроконтроллер 3 передает указанное тревожное сообщение в первый приемопередающий модуль 4, который излучает в эфир стандартный высокочастотный сигнал сотовой сети подвижной связи (например, GSM-сигнал), несущий указанное тревожное сообщение. Одновременно микроконтроллер 3 передает то же указанное тревожное сообщение в объектовое оконечное устройство 5, которое формирует и излучает в эфир тревожные сигналы с прыгающими несущими частотами - тревожные hopping-сигналы (то есть, hopping-сигналы, несущие указанное тревожное сообщение).
Особенности hopping-сигнала (патент RU №2231458, В 60 R 25/00, G 08 В 25/10) обуславливают его высокую помехозащищенность при достаточно низкой (до 5 мВт) мощности излучения. Это подтвердили натурные испытания с применением hopping-сигналов, проведенные предприятием-заявителем в рамках НИОКР-Карнет 3. Однако формирование, излучение, ретрансляция и обработка hopping-сигналов не относятся к тематике настоящего патента и поэтому далее не рассматриваются.
В те промежутки времени, когда УТС находится в зоне устойчивого приема сигналов глобальной спутниковой системы радионавигации, текущее местоположение УТС определяется непосредственно на борту с помощью GPS-приемника 6. Измеренные GPS-приемником 6 координаты УТС поступают в микроконтроллер 3, который включает их в состав тревожного сообщения, используя соответствующий протокол. Указанные тревожные сообщения, содержащие координаты УТС, передаются далее двумя путями:
- через объектовое оконечное устройство 5 - в виде тревожного hopping-сигнала - на входящий в состав аэростатной подсистемы 7 ретранслятор 8 hopping-сигналов;
- через первый приемопередающий модуль 4 - в GSM-сеть.
Несущий тревожное сообщение тревожный hopping-сигнал, излученный объектовым оконечным устройством 5, принимается одним или несколькими ретрансляторами 8 hopping-сигналов (фиг.4), входящими в состав воздушных комплексов 9 наблюдения, установленных на борту аэростатных носителей 10.
Ретранслятор 8 hopping-сигналов принимает тревожный hopping-сигнал, излученный с борта УТС, дополняет служебной информацией о проводимой ретрансляции (для запрета повторной ретрансляции) и передает его в центр 11 сбора и обработки информации. В центре 11 сбора и обработки информации (фиг.5) ретранслированный тревожный hopping-сигнал принимается приемником 12 hopping-сигналов, сравнивается с сигналами, полученными от других ретрансляторов 8 hopping-сигналов, и - при выявлении отличий - подается на один из входов пультового оконечного устройства 13.
Если УТС находится в зоне действия стандартной сотовой сети подвижной связи, то одновременно стандартный высокочастотный сигнал, излученный первым приемопередающим модулем 4 и несущий тревожное сообщение, поступает на вход второго приемопередающего модуля 14 и из него подается на соответствующий вход пультового оконечного устройства 13.
Таким образом, от одного УТС в пультовое оконечное устройство 13 может поступить до двух однотипных тревожных сообщений. При наличии двух однотипных тревожных сообщений пультовое оконечное устройство 13 игнорирует одно из этих тревожных сообщений. Далее, в пультовом оконечном устройстве 13 тревожное сообщение, полученное из приемника 12 hopping-сигналов или из второго приемопередающего модуля 14, селектируется и преобразуется в стандартный формат, воспринимаемый адаптером 15 ввода информации, входящим в состав ПЦН 16. Через адаптер 15 ввода информации указанное тревожное сообщение поступает в блок 17 первичной обработки информации, подвергается цифровой обработке и подается в блок 18 вторичной обработки и отображения картографической, семантической и видеоинформации. В блоке 18 вторичной обработки и отображения картографической, семантической и видеоинформации эта информация дополнительно обрабатывается с участием человека-оператора в соответствии с ГИС-технологией и отображается на экране монитора. Результатом данного этапа обработки является идентификация УТС, то есть представление на экране монитора в удобном для оператора виде отметки УТС на фоне фрагмента карты-схемы обслуживаемого района в сопровождении идентификационной текстовой информации (например, цвет, государственный номер и марка УТС, данные о его владельце и т.п.). Результаты указанной обработки, называемые далее целеуказаниями, передаются в сеть пунктов 19 централизованной охраны.
После идентификации УТС оператор центра 11 сбора и обработки информации визуально оценивает представленную на экране монитора картографическую, семантическую и видеоинформацию и принимает решение о дальнейших действиях. В частности, он может с помощью блока 18 вторичной обработки и отображения картографической, семантической и видеоинформации подать соответствующую команду на пультовое оконечное устройство 13. По этой команде пультовое оконечное устройство 13 через второй приемопередающий модуль 14 подает по GSM-сети команду на глушение двигателя УТС. О подаче такой команды блок 18 вторичной обработки и отображения картографической, семантической и видеоинформации сообщает путем подачи извещений на пункты 19 централизованной охраны. Тактика перехвата УТС силами быстрого реагирования теперь должна строиться исходя из того, что уже подана команда на глушение двигателя УТС.
По GSM-сети команда на глушение двигателя УТС принимается в установке 1 охранной сигнализации (фиг.3) на УТС первым приемопередающим модулем 4 и далее передается в микроконтроллер 3, который формирует соответствующую команду на исполнительные органы УТС.
Спецификой обработки информации в рассматриваемой системе, по сравнению с системой-прототипом, является использование, совместно с картографической и семантической информацией, растровых видеоизображений, получаемых видеокамерой 20 с борта аэростатного носителя 10.
Процесс получения и использования в едином технологическом процессе растровых видеоизображений совместно с семантической и картографической информацией, заключается в следующем.
После идентификации УТС оператор центра 11 сбора и обработки информации посылает целеуказание с выхода блока 18 вторичной обработки и отображения картографической, семантической и видеоинформации в пультовое оконечное устройство 13. Из него оно поступает в оконечные устройства 21 наземных комплексов 22 аэростатной подсистемы 7.
Одновременно с помощью датчиков, входящих в состав установленного на борту аэростатного носителя 10 воздушного комплекса 9 наблюдения, измеряется ряд необходимых полетных параметров. К ним могут относиться, например, высота подъема аэростатного носителя 10 над землей, скорость горизонтального дрейфа, вызванного ветровыми нагрузками и другие параметры. При этом высота подъема аэростатного носителя 10 над землей регулируется с помощью установленной в наземном комплексе 22 лебедки 22'.
С помощью механизма 23 стабилизации и управления ориентацией измеряются параметры угловой ориентации видеокамеры 20 в пространстве, которые передаются в блок 24 управления видеокамерой. Значения измеренных датчиками полетных параметров и параметров угловой ориентации через блок 25 контроля полетных параметров по кабелю-тросу 26 передаются на наземный комплекс 22 (в оконечное устройство 21).
В оконечном устройстве 21 рассчитываются угловые поправки на положение видеокамеры 20, необходимые для того, чтобы УТС, перемещаясь по улично-дорожной сети, находилось бы всегда в средней части поля обзора видеокамеры 20. Для расчета угловых поправок используются:
- значения текущих координат УТС, поступающие из центра 11 сбора и обработки информации;
- заранее известные географические координаты самого наземного комплекса 22;
- переданные с борта аэростатного носителя 10 полетные параметры;
- переданные с борта аэростатного носителя 10 параметры угловой ориентации видеокамеры 20 в трехмерном пространстве, измеренные с помощью механизма 23 стабилизации и управления ориентацией.
Рассчитанные в оконечном устройстве 21 значения угловых поправок передаются по кабелю-тросу 26 на борт аэростатного носителя 10 - в блок 24 управления видеокамерой. С использованием указанных угловых поправок в блоке 24 управления видеокамерой рассчитываются управляющие воздействия на механизм 23 стабилизации и управления ориентацией, необходимые для того, чтобы правильно ориентировать видеокамеру 20.
После того как видеокамера 20 заняла требуемое положение, получаемые с ее помощью видеокадры земной поверхности, содержащие изображение УТС и прилегающих участков улично-дорожной сети, передаются в блок 27 компрессии видеоизображений.
После сжатия, например, с помощью JPEG-преобразования в блоке 27 компрессии видеоизображений, сжатое видеоизображение поступает в передатчик 28 видеоизображений, переносится на высокочастотную несущую и транслируется по радиоэфиру в центр 11 сбора и обработки информации. Здесь оно принимается приемником 29 видеоизображений и после предварительной амплитудной и геометрической коррекции в блоке 30 преобразования видеоизображений подается в блок 18 вторичной обработки и отображения картографической, семантической и видеоинформации. Далее указанное видеоизображение обрабатывается в соответствии с ГИС-технологией. В частности, вышеупомянутый программно-аппаратный комплекс Geobuilder  обеспечивает организацию доступа к любым типам информации через систему независимых драйверов, осуществляет развязку графического ядра и пользовательского интерфейса с системой хранения и управления данными. Это позволяет интегрировать в единой среде информацию от различных источников. Любой источник, поддерживаемый Geobuilder, фактически является или может рассматриваться как база данных. Это - растровые слои видеоизображений, векторные и семантические данные, математические модели, подключенные через систему драйверов.
обеспечивает организацию доступа к любым типам информации через систему независимых драйверов, осуществляет развязку графического ядра и пользовательского интерфейса с системой хранения и управления данными. Это позволяет интегрировать в единой среде информацию от различных источников. Любой источник, поддерживаемый Geobuilder, фактически является или может рассматриваться как база данных. Это - растровые слои видеоизображений, векторные и семантические данные, математические модели, подключенные через систему драйверов.
Таким образом, на экране монитора блока 18 вторичной обработки и отображения картографической, семантической и видеоинформации отображается участок улично-дорожной сети с координатной отметкой УТС, соответствующей координатам, определенным GPS-приемником 6 и переданным в составе тревожного сообщения, поступившего в центр 11 сбора и обработки информации. Координатную отметку УТС сопровождает текстовая информация с идентификационными признаками УТС, выделенная из того же тревожного сообщения. Кроме того, на экране монитора отображаются те ТС, движущиеся по улично-дорожной сети, которые попали в поле обзора соответствующей видеокамеры 20. Руководствуясь идентификационными признаками УТС, оператор определяет, какое из ТС, движущихся по улично-дорожной сети, является УТС, с которого было подано тревожное сообщение. Если злоумышленники не изменили идентификационные признаки (например, государственный номер и цвет ТС), то отождествление УТС с определенной отметкой ТС, движущегося по улично-дорожной сети, требует поступления всего одного тревожного сообщения. При изменении государственного номера или цвета УТС для точного отождествления УТС требуется поступление трех или четырех тревожных сообщений.
Отождествление УТС с конкретным движущимся объектом позволяет оператору использовать при настройке и работе с блоком 18 вторичной обработки и отображения картографической, семантической и видеоинформации все преимущества системы управления базами данных. В частности, в рассматриваемом случае обеспечиваются надежное выделение отметки УТС на фоне шумов, ее устойчивое сопровождение и привязка к улично-дорожной сети с возможностью определения местоположения относительно опознанных ориентиров. С выхода блока 18 вторичной обработки и отображения картографической, семантической и видеоинформации информация об идентификационных признаках и текущем местоположении УТС поступает в пункты 19 централизованной охраны. Процедуры последующего использования указанного целеуказания в пунктах 19 централизованной охраны для перехвата УТС силами быстрого реагирования не относятся к предмету данной заявки и в дальнейшем не рассматриваются.
Электропитание подается на борт аэростатного носителя 10 из блока 31 питания и управления полетными параметрами. Из этого же блока на лебедку 22' поступают команды, позволяющие, например, уменьшить длину кабеля-троса 26 и, соответственно, высоту полета аэростатного носителя 10 - в случае недопустимо больших ветровых нагрузок на аэростатный носитель 10. Указанные команды формируются в оконечном устройстве 21 в соответствии с сигналами от датчиков, поступающими из блока 25 контроля полетных параметров.
При перемещении УТС по улично-дорожной сети процесс измерения его текущих координат с помощью GPS-приемника 6 может периодически прерываться, вследствие затенения высокими домами и деревьями, либо в том случае, когда злоумышленниками поставлена преднамеренная помеха глобальным спутниковым системам радионавигации. В системе-прототипе отметка УТС при этом исчезнет с экрана монитора, и, соответственно, оператор центра 11 сбора и обработки информации будет лишен возможности сопровождения УТС и выдачи целеуказаний в пункты 19 централизованной охраны.
В рассматриваемой системе этого не произойдет, благодаря тому, что УТС определено как конкретный движущийся объект, и сопровождение УТС осуществляется с использованием видеокамеры 20, ориентация которой в пространстве изменяется в соответствии с изменением местоположения сопровождаемого УТС. Сведения об указанных изменениях содержатся в последовательности целеуказаний, посылаемых из центра 11 сбора и обработки информации в оконечное устройство 21, которое формирует соответствующие корректирующие команды для управления ориентацией видеокамеры 20. По кабелю-тросу 26 эти команды поступают в блок 24 управления видеокамерой и отрабатываются механизмом 23 стабилизации и управления ориентацией видеокамеры 20. По тому же кабелю-тросу 26 в блок 24 управления видеокамерой из оконечного устройства 21 могут поступать команды управления оптическими параметрами видеокамеры 20, например фокусным расстоянием объектива, диафрагмой, шириной угла поля зрения и другими параметрами. Эти команды преобразуются в блоке 24 управления видеокамерой в соответствующие управляющие воздействия, которые подаются на исполнительные органы видеокамеры 20. Измеренные значения оптических параметров видеокамеры 20 передаются в обратном направлении - из видеокамеры 20 в блок 24 управления видеокамерой и используются при расчете управляющих воздействий.
Благодаря достаточно высокому разрешению видеокамеры 20, позволяющему различить УТС в городском потоке машин и "привязать" его видеоизображение к близлежащим опорным ориентирам: домам, перекресткам и т.п., местоположение УТС может быть определено достаточно точно и при временном прерывании приема спутниковых сигналов GPS-приемником 6. Это существенно повышает устойчивость системы по отношению к изменениям условий наблюдения и помеховой обстановки и, как следствие, обеспечивает более высокую эффективность перехвата УТС.
Таким образом, решается задача настоящего изобретения - созданная на его основе система для поиска и перехвата УТС способна более эффективно, чем система-прототип, обеспечить перехват УТС.
Обеспечиваемый технический результат заключается в повышении точности определения местоположения УТС в условиях нарушения устойчивого приема сигналов глобальной спутниковой системы радионавигации, вызванного влиянием высотной застройки и/или применением угонщиками преднамеренных помех. Указанный результат достигается за счет введения в состав аппаратуры, устанавливаемой на борту аэростатного носителя 10, видеокамеры 20 и использования получаемых с борта аэростатного носителя видеоизображений УТС и прилегающих участков улично-дорожной сети для "привязки" отметки УТС к карте-схеме контролируемой городской территории. Это позволяет обеспечить приемлемую точность определения местоположения УТС относительно элементов улично-дорожной сети (домов, перекрестков и других опорных ориентиров) даже в случае глушения GPS-приемника 6 злоумышленниками при движении УТС по улично-дорожной сети.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОСИГНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, ОБЪЕКТОВ НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2231458C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОЙ РАДИООХРАНЫ С ИСПОЛЬЗОВАНИЕМ ПАТРУЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2238590C1 |
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| РАДИОПЕЛЕНГАЦИОННАЯ СИСТЕМА ДЛЯ ПОИСКА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2264937C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| СПОСОБ ПОИСКА И ПЕРЕХВАТА УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228274C1 |
| СПОСОБ ОХРАННОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ВИДЕОНАБЛЮДЕНИЯ | 2004 |
|
RU2260209C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА МОНИТОРИНГА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2240938C1 |
| ИНФОРМАЦИОННО-ОХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2244641C1 |
| СПОСОБ ПЕРЕДАЧИ ИЗВЕЩЕНИЙ ПРИ ОХРАНЕ ГРУППЫ ОБЪЕКТОВ | 2004 |
|
RU2265250C1 |
Изобретение относится к системам централизованной радиоохраны транспортных средств (ТС). На борту ТС имеются установка охранной сигнализации, выполненная с возможностью приема сигналов глобальной спутниковой системы радионавигации и определения текущего местоположения угнанного ТС, а также с возможностью излучения и приема сигналов стандартной сотовой сети подвижной связи и излучения сигналов с прыгающей несущей частотой - hopping-сигналов с кодовыми сообщениями об идентификационных признаках ТС и о его текущем местоположении. В пределах контролируемой территории распределены аэростатные подсистемы, каждая из которых состоит из связанных посредством кабеля-троса воздушного комплекса наблюдения, включающего в себя ретранслятор hopping-сигналов и блок контроля полетных параметров, а также наземного комплекса с лебедкой для кабеля-троса, обеспечивающего подачу на борт аэростатного носителя электропитания, прием с борта сигналов контроля полетных параметров и управление лебедкой. Центр сбора и обработки информации выполнен с возможностью приема ретранслированных hopping-сигналов, селекции и обработки кодовых сообщений и отображения результатов обработки в виде отметок ТС, перемещающихся на фоне карты-схемы улично-дорожной сети, измерения текущего местоположения ТС, формирования и передачи на пункты централизованной охраны кодовых сообщений об идентификационных признаках и текущем местоположении ТС на улично-дорожной сети для формирования целеуказаний силам быстрого реагирования, а также с возможностью передачи по радиоэфиру либо по проводным каналам связи в наземные комплексы аэростатных подсистем команд управления полетными параметрами аэростатного носителя и приема из наземных комплексов сигналов контроля полетных параметров. В состав воздушного комплекса наблюдения введены видеокамера, блок управления видеокамерой, блок компрессии видеоизображений и передатчик видеоизображений, выполненный с возможностью передачи по радиоэфиру с борта аэростатного носителя в центр сбора и обработки информации подвергнутых компрессии видеоизображений. При этом данный центр сбора и обработки информации обеспечивает геометрические и амплитудные преобразования указанных видеоизображений и совмещение их с соответствующими фрагментами карты-схемы улично-дорожной сети, а также поиск, обнаружение и идентификацию ТС по полученным кодовым сообщениям, уточнение местоположения ТС относительно элементов улично-дорожной сети и коррекцию данных, передаваемых на пульт централизованной охраны для формирования целеуказаний силам быстрого реагирования. Система характеризуется повышенной точностью определения местоположения ТС в условиях нарушений устойчивого приема сигналов глобальной спутниковой системы радионавигации. 3 з.п. ф-лы., 6 ил.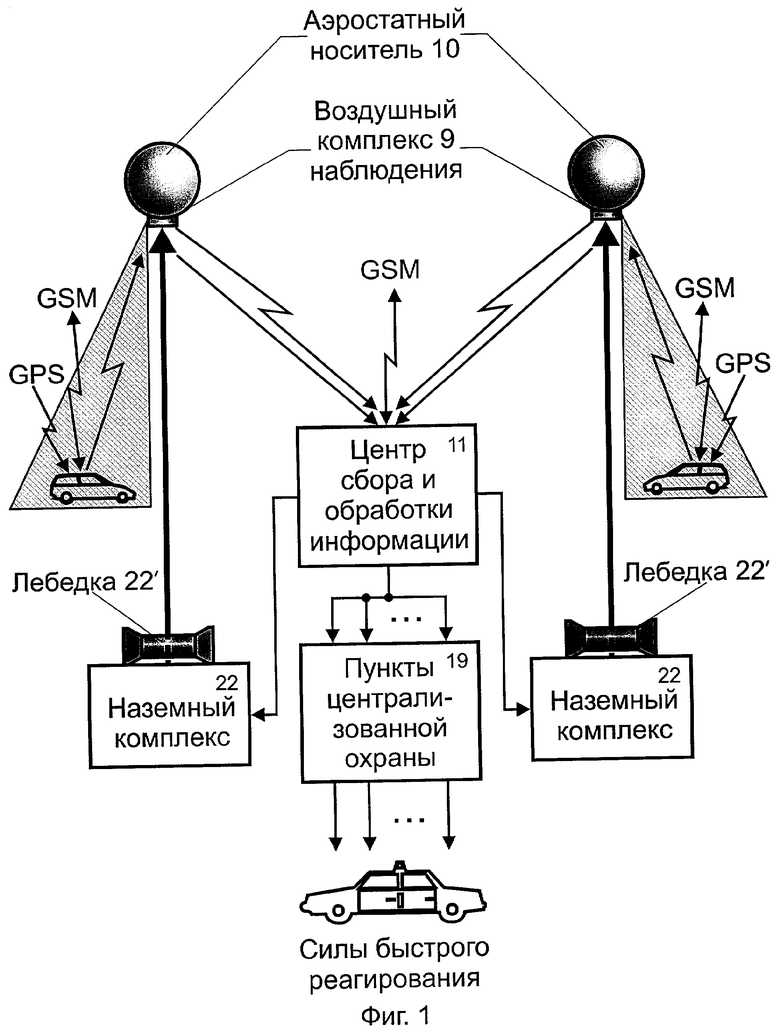
| РАДИОСИГНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, ОБЪЕКТОВ НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2231458C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2002 |
|
RU2198800C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ, НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2001 |
|
RU2182088C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |

