Изобретение относится к комплексам радиолокационной аппаратуры (КРА) взлета и посадки летательных аппаратов (ЛА) и может быть использовано в системах управления воздушным движением, а также управлением посадкой и взлетом ЛА в боевых условиях.
Известны КРА, используемые при посадке и взлете ЛА - самолетов, вертолетов и др.
К таким КРА относится система посадки метрового диапазона типа ILS, обеспечивающая посадку самолетов, стандартизированная международной организацией гражданской авиации (ICAO) [1, 2]. Известны усовершенствованные системы ILS, повышающие безопасность полетов и посадки [3].
Такие КРА содержат наземную аппаратуру, включающую посадочные радиомаяки (РМ), посадочный радиолокатор (ПРЛ) с антеннами курса и глиссады, направленными в сторону взлетно-посадочной полосы (ВПП), диспетчерский пульт с индикатором диспетчера и блоком управления.
Известно, что наибольшее количество авиапроисшествий (АП) происходит при взлете и посадке ЛА. К недостаткам систем ILS относится возможность использования таких систем только при посадке.
Более совершенной является система посадки сантиметрового диапазона типа MLS, также стандартизированная ICAO [4] и аналогичная по общей структуре системе ILS [1].
Как система ILS, так и система MLS предназначены для обслуживания одной взлетно-посадочной полосы.
При обслуживании даже двух соседних полос необходимо использовать практически двойной комплект аппаратуры ILS или MLS, например, в случае MLS необходимо по четыре комплекта РМ (по одному РМ в начале и конце ВПП), по два ПРЛ и по два пульта диспетчера.
Задачей настоящего заявляемого изобретения является упрощение и удешевление КРА при эксплуатации двух соседних ВПП. Поставленная задача решается следующим образом.
Во взлетно-посадочном комплексе радиолокационной аппаратуры, содержащем наземную аппаратуру взлета и посадки, включающую посадочный радиолокатор с антеннами курса и глиссады, направленными в сторону взлетно-посадочной полосы, диспетчерский пульт с индикатором диспетчера и блоком управления, при этом выход посадочного радиолокатора подключен ко входу диспетчерского пульта, а выход блока управления, через выход диспетчерского пульта подключен к управляющему входу посадочного радиолокатора, в качестве наземной аппаратуры взлета и посадки использован посадочный радиолокатор, размещенный между двумя соседними взлетно-посадочными полосами на равных расстояниях от центров этих взлетно-посадочных полос, при этом посадочный радиолокатор снабжен дополнительными антеннами курса и глиссады, в диспетчерский пульт введены дополнительный индикатор диспетчера и разделительный модем, вход которого образует вход диспетчерского пульта, а первый и второй выходы соединены соответственно с входом индикатора диспетчера и входом дополнительного индикатора диспетчера, блок управления выполнен с дополнительным выходом, который через дополнительный выход диспетчерского пульта соединен с дополнительным управляющим входом посадочного радиолокатора, причем антенны курса и глиссады и дополнительные антенны курса и глиссады направлены в стороны соседних взлетно-посадочных полос и выполнены так, что их диаграммы направленности различаются по частоте излучения.
Предлагается дополнительный вариант КРА, в котором введены первая и вторая двусторонние линии передачи данных земля-воздух, обеспечивающие информационную связь между подлетающими к соответствующей взлетно-посадочной полосе летательными аппаратами и посадочным радиолокатором, причем передающие наземные входы упомянутых первой и второй линии передачи данных подключены к соответственно первому и второму дополнительным передающим выходам посадочного радиолокатора, а первый и второй приемные наземные выходы упомянутых линий передачи данных подключены соответственно к первому и второму дополнительным приемным входам посадочного радиолокатора.
Заявляется также посадочный радиолокатор, содержащий антенны курса и глиссады с приводом сканирования, антенный коммутатор, боковые выводы которого подключены ко входам антенн курса и глиссады, а центральный вывод подключен к центральному выводу переключателя прием-передача, приемный выход которого подключен ко входу приемника, а также передатчик, вход которого связан с выходом синхронизатора, блок обработки информации, выход которого соединен со входом видеопреобразователя, выход которого образует выход посадочного радиолокатора, при этом управляющий вход привода сканирования образует управляющий вход посадочного радиолокатора, при этом введены дополнительные антенны курса и глиссады с дополнительным приводом сканирования, дополнительные антенный коммутатор, переключатель прием-передача и приемник, а также переключатель пар антенн курса и глиссады и блок объединения приемных сигналов, при этом выход передатчика подключен к передающему входу переключателя пар антенн курса и глиссады, управляющий вход которого соединен с дополнительным выходом синхронизатора, выходы его подключены соответственно к передающим входам упомянутых переключателей прием-передача, приемный выход дополнительного переключателя прием-передача подключен ко входу дополнительного приемника, выходы упомянутых приемников подключены через блок объединения приемных сигналов ко входу блока обработки информации, а управляющий вход дополнительного привода сканирования образует дополнительный управляющий вход посадочного радиолокатора, при этом выходной сигнал передатчика включает первый и второй пакеты импульсов, различающиеся по несущей частоте и определяющие частоты излучения диаграмм направленности соответственно антенн курса и глиссады и дополнительных антенн курса и глиссады.
Предлагается также дополнительный по выполняемым функциям посадочный радиолокатор, в котором введен разделительный модем, вход которого соединен с выходом блока обработки информации, первый и второй выходы образуют соответственно первый и второй дополнительные передающие выходы посадочного радиолокатора, а видеопреобразователь выполнен с первым и вторым приемными входами, образующими соответственно одноименные дополнительные приемные входы посадочного радиолокатора.
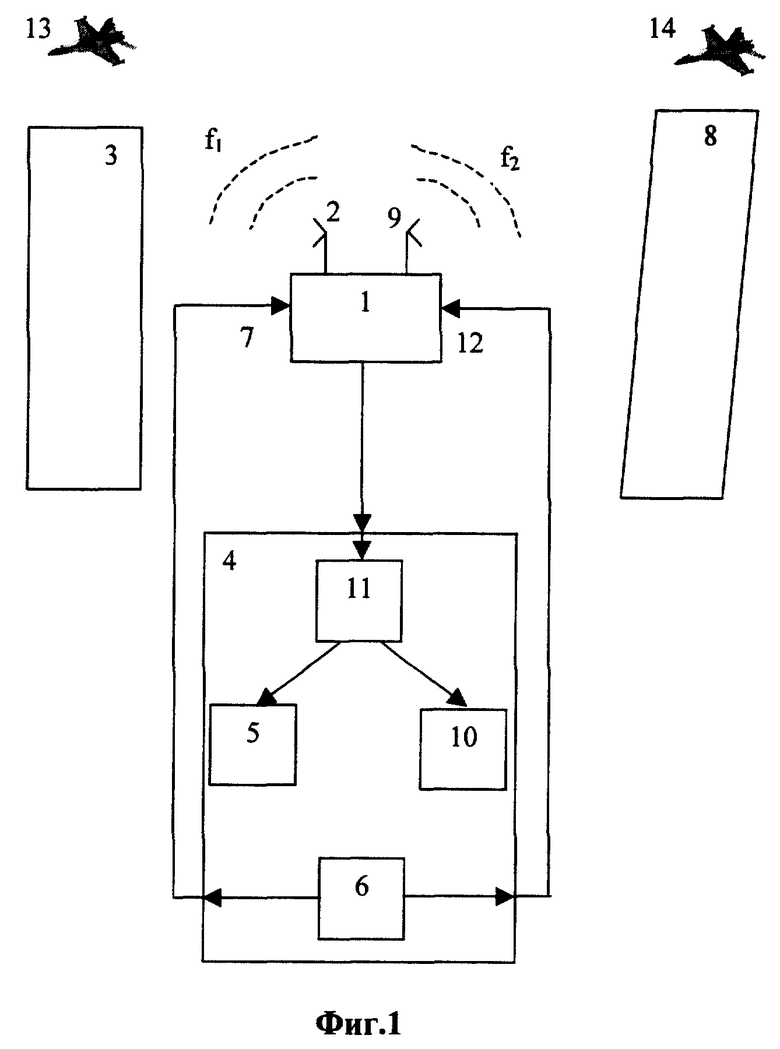
На фиг.1, 2 представлены структурные схемы заявляемого КРА (фиг.1) и его дополненного варианта (фиг.2).
Заявляемый взлетно-посадочный КРА содержит наземную аппаратуру взлета и посадки, включающую посадочный радиолокатор (ПРЛ) 1 с антеннами курса и глиссады (АКГ) 2, направленными в сторону взлетно-посадочной полосы 3, диспетчерский пульт 4 с индикатором диспетчера 5 и блоком управления 6, при этом выход посадочного радиолокатора подключен ко входу диспетчерского пульта, а выход блока управления через выход диспетчерского пульта подключен к управляющему входу посадочного радиолокатора 7, причем посадочный радиолокатор размещен между двумя соседними взлетно-посадочными полосами (ВПП) 3 и 8 на равных расстояниях от центров этих ВПП, снабжен дополнительными антеннами курса и глиссады (ДАКГ) 9, направленными в сторону соседней ВПП 8, в диспетчерский пульт введены дополнительный индикатор диспетчера 10 и разделительный модем 11, вход которого образует вход диспетчерского пульта, а первый и второй выходы соединены соответственно со входами индикатора диспетчера 5 и входом дополнительного индикатора диспетчера 10, блок управления 6 выполнен с дополнительным выходом, который через дополнительный выход диспетчерского пульта соединен с дополнительным управляющим входом 12 посадочного радиолокатора. Таким образом, антенны курса и глиссады и дополнительные антенны курса и глиссады направлены в стороны соседних взлетно-посадочных полос 3 и 8, выполнены они так, что диаграммы направленности упомянутых пар антенн различаются по частотам излучения (частота излучения АКТ – f1, частота излучения ДАКГ - f2).
Такой ПРЛ обеспечивает слежение за посадкой или взлетом ЛА 13 и 14, обслуживаемых соответственно ВПП 3 и 8.
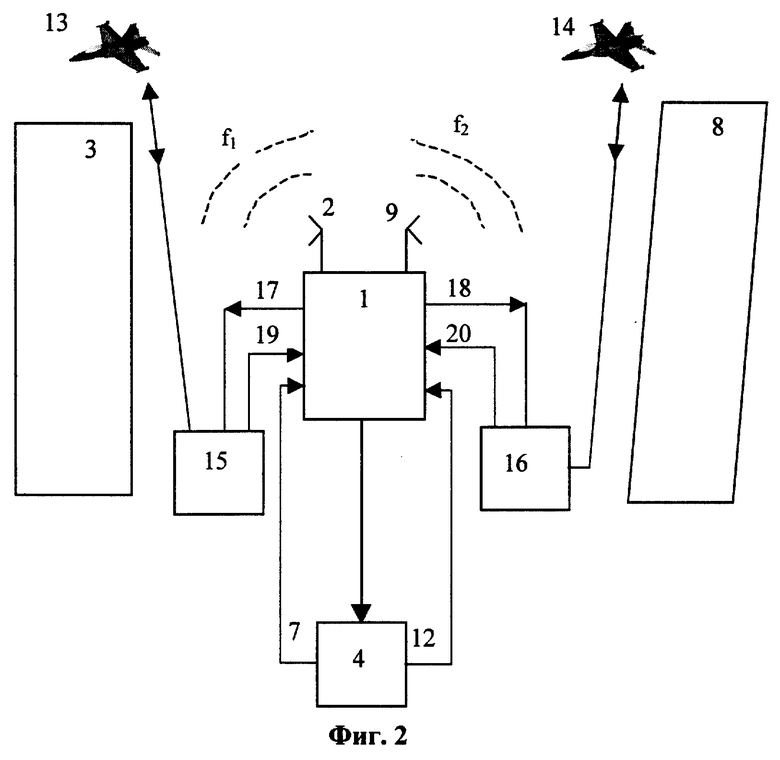
В варианте КРА на фиг.2 введены первая и вторая двусторонние линии передачи данных земля-воздух (ДЛПД) 15 и 16, обеспечивающие информационную связь между подлетающими к соответствующей взлетно-посадочной полосе ЛА 13 и 14 и посадочным радиолокатором 1, причем передающие наземные входы ДЛПД 15 и 16 подключены соответственно к первому 17 и второму 18 дополнительным передающим выходам посадочного радиолокатора 1, а первый и второй приемные наземные выходы упомянутых линий передачи данных подключены соответственно к первому 19 и второму 20 дополнительным приемным входам посадочного радиолокатора.
КРА работает следующим образом. Посадочный радиолокатор формирует в парных антеннах курса и глиссады - АКГ и ДАКГ - диаграммы направленности с разной частотой излучения и ориентирует данные антенны на соседние ВПП, при этом АКГ облучает ЛА, совершающие посадку или взлетающие с помощью ВПП 3, а ДАКГ облучает ЛА, взаимодействующие с ВПП 8. Получаемая с помощью АКГ и ДАКГ полетная информация передается ПРЛ на пульт диспетчера. Со входа пульта диспетчера информация через разделительный модем поступает на входы индикатора диспетчера и дополнительного индикатора диспетчера, каждый из которых отображает информацию, относящуюся только к одной из соседних ВПП. Управление ПРЛ осуществляется независимо для каждой пары антенн с помощью управляющего блока 6 в диспетчерском пульте, при этом сигналы с выхода диспетчерского пульта поступают на управляющий вход ПРЛ и управляют положением АКГ, а сигналы с дополнительного выхода диспетчерского пульта поступают на дополнительный управляющий вход ПРЛ и управляют положением ДАКГ. Благодаря различающимся частотам излучения диаграмм направленности АКГ и ДАКГ (f1 и f2) осуществляется одновременное обслуживание ВПП 3 и ВПП 8 с весьма низким уровнем взаимных помех, что позволяет располагать соседние ВПП на близких расстояниях, определяемых только тактико-техническими летными данными ЛА. Связь пилота с диспетчером осуществляется при этом с помощью радиосвязи.
Вариант КРА на фиг.2, дополненный ДЛПД, позволяет пилоту ЛА получать взлетно-посадочную информацию с пульта диспетчера. В этом случае осуществляется активный привод ЛА к ВПП, а также возможность приема оперативных указаний диспетчера при взлете. При построении КРА по схеме на фиг.2 управление ЛА с помощью одного ПРЛ позволяет полностью исключить необходимость применения радиомаяков и обеспечить необходимую скорость связи пилот-диспетчер. Таким образом, с помощью ПРЛ с расширенными функциями и усовершенствованного пульта диспетчера заявленный взлетно-посадочный комплекс решает задачи, выполняемые ранее более громоздкой и дорогостоящей аппаратурой.
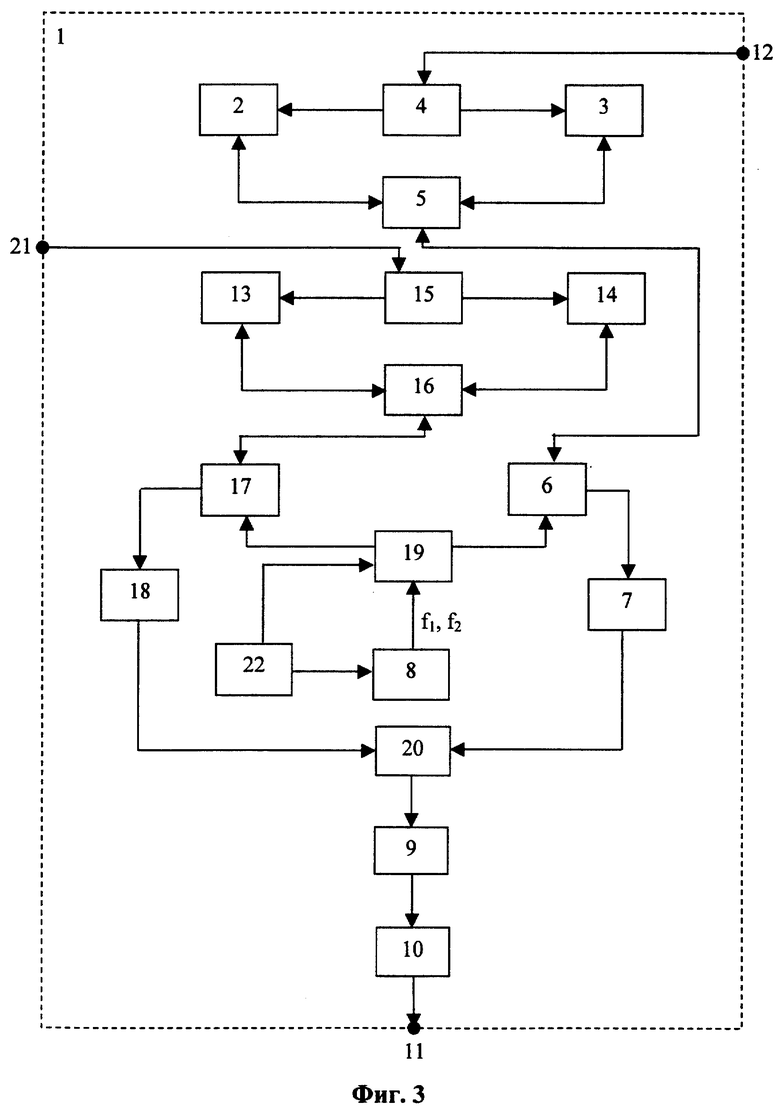
На фиг.3 и 4 даны структурные схемы ПРЛ, обеспечивающие работу КРА по схемам фиг.1 и 2 соответственно.
Посадочный радиолокатор 1 содержит антенны курса 2 и глиссады 3 (АКГ) с приводом сканирования 4, антенный коммутатор 5, боковые выводы которого подключены ко входам антенн курса и глиссады, а центральный вывод подключен к центральному выводу переключателя прием-передача (ППП) 6, приемный выход которого подключен ко входу приемника 7, а также передатчик 8, блок обработки информации (БОИ) 9, выход которого соединен со входом видеопреобразователя 10, выход которого образует выход посадочного радиолокатора 11, при этом управляющий вход привода сканирования образует управляющий вход посадочного радиолокатора 12, при этом введены дополнительные антенны курса 13 и глиссады 14 (ДАКГ) с дополнительным приводом сканирования 15, дополнительный антенный коммутатор 16, дополнительный переключатель прием-передача (ДППП) 17 и дополнительный приемник 18, а также переключатель пар антенн курса и глиссады (ППА) 19 и блок объединения приемных сигналов (БОПС) 20, при этом выход передатчика подключен ко входу ППА 19, первый и второй выходы которого подключены соответственно к передающим входам ППП 6 и ДППП 17, приемный выход ДППП 17 подключен ко входу дополнительного приемника, выходы упомянутых приемников подключены через БОПС 20 ко входу БОИ 9, а управляющий вход дополнительного привода сканирования образует дополнительный управляющий вход посадочного радиолокатора 21, при этом выходной сигнал передатчика включает первый и второй пакеты импульсов, различающиеся по несущим частотам (f1 и f2) и определяющие частоты излучения диаграмм направленности соответственно АКГ 2 и 3, ДАКГ 13 и 14. Синхронизатор 22 соединен выходом со входом передатчика 8, а дополнительным выходом - с управляющим входом ППА 19.
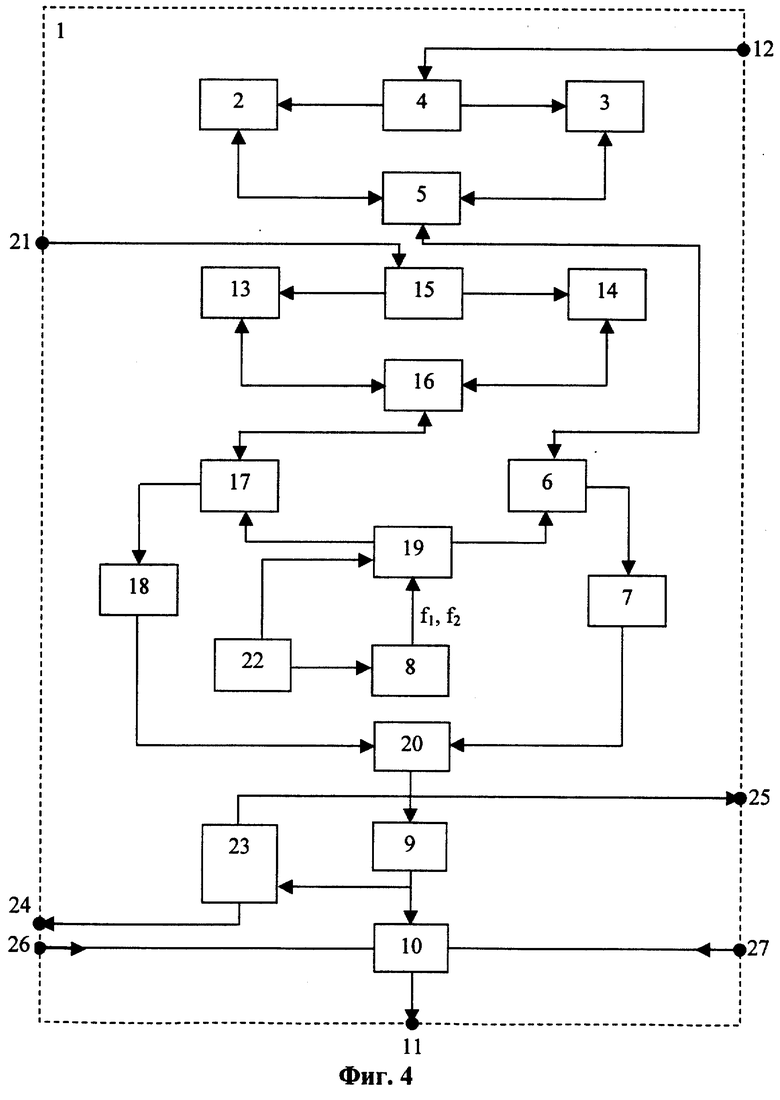
В посадочном радиолокаторе на фиг.4 введены разделительный модем 23 вход которого соединен с выходом БОИ 9, первый и второй выходы образуют соответственно первый и второй дополнительные передающие выходы (ДПВ) 24 и 25 посадочного радиолокатора, а видеопреобразователь выполнен с первым и вторым приемными входами, образующими соответственно одноименные дополнительные приемные входы (ДПВх) 26 и 27 посадочного радиолокатора.
ПРЛ работает следующим образом (см. фиг.3).
Передатчик 8 генерирует по сигналу с выхода синхронизатора 22 сложный сигнал, включающий два пакета импульсов, различающиеся по несущим частотам (f1 и f2). Управляющий сигнал с дополнительного выхода синхронизатора 22 обеспечивает работу ППА 19 таким образом, что на передающие входы ППП 6 и ППП 17 поступает только один из двух пакетов импульсов с одной и той же несущей частотой.
Далее каждый из пакетов импульсов с центральных выводов ППП 6 и ППП 17 поступает соответственно на входы антенных коммутаторов 5 и 16, а затем на входы АКГ 2 и 3 и ДАКГ 13 и 14.
Работа АКГ и ДАКГ происходит идентично, при этом частоты их излучения определяются пакетами импульсов с разной несущей частотой, что позволяет направлять диаграммы направленности АКГ и ДАКГ к соседним ВПП и работать независимо друг от друга, обеспечивая помехоустойчивость каждого из приемо-передающих трактов ПРЛ.
В режиме приема принятые АКГ 2, 3 и ДАКГ 13, 14 сигналы соответственно через ППП 6 и ППП 17 поступают на входы приемников 7 и 18. С их выходов усиленные, преобразованные в цифровую форму и индексируемые по номеру канала сигналы через БОПС 20 поступают на вход БОИ 9, далее преобразуются в видеопреобразователе 10 в видеоинформацию, поступающую с выхода ПРЛ в диспетчерский пульт.
В варианте ПРЛ возможно предусмотреть (см. фиг.4) разделение обработанной суммарной информации на составляющие, получаемые каждым из приемо-передающих трактов, для этого использован разделительный модем 23, на вход которого информация поступает с выхода БОИ 9. Информация на выходах модема 23, образующих ДПВ 24 и 25, соответствует одному из упомянутых трактов и может быть использована для трансляции на ЛА, взаимодействующие с ПРЛ, а также для дальнейшей обработки.
В ПРЛ на фиг.4 для ввода информации, получаемой от ЛА, используются ДПВх 26 и 27, с которых информация поступает соответственно на первый и второй входы видеопреобразователя 10 и преобразуется в нем в случае необходимости в видеоинформацию.
Предложенный КРА реализован в виде экспериментального образца и прошел успешные испытания.
В качестве большинства узлов и блоков использованы серийно выпускаемые изделия:
ПРЛ 1 - ПРЛ типа РП 3Ф, в комплекте с аппаратурой первичной обработки информации АПОИ-С2;
пульт диспетчера 4 - пульт руководителя системы посадки типа ВИСП-75 Т;
ЛПД 15, 16 - телеметрические комплексы передачи передачи информации “Орбита-IV”.
В качестве передатчика 8 использован передатчик на базе клистрона “Айсберг”, изготовляемого АОЗТ “Светлана” (г. Санкт-Петербург).
Блок обработки информации 9 - блок РШПИ.468136.001 на основе программируемых логических матриц типа “Altera” и сигнальных процессоров фирмы AHanorDevice, разработанный ФГУП “ВНИИРА” (г. Санкт-Петербург).
Блок объединения приемных сигналов 20 - на основе блока РШПИ.468364.033 (ФГУП “ВНИИРА”).
Приемники 7 и 18 выполнены на базе блока РШПИ.464335.026 (ФГУП “ВНИИРА”).
При испытаниях использовался самолет СУ-27. Стоимость заявленного КРА оказалась в 2,5 раза меньше стоимости известных КРА.
Таким образом, заявляемый ПРЛ содержит новые схемные связи, обеспечивающие выполнение им новых, неизвестных ранее функций.
Такой ПРЛ найдет широкое применение для необорудованных аппаратурой аэродромов, заменяя дорогостоящую и сложную КРА взлета и посадки ЛА.
Источники информации
1. М.А.Черный, В.И.Кораблин. Воздушная навигация. М.: Транспорт, 1983, с. 272.
2. Эксплуатация средств управления воздушным движением. Справочник. Авторы: А.Кузнецов и др. М.: Транспорт, 1983, с. 28-32, 52-58.
3. Заявка Франции 2752051 , МПК6 G 01 С 23/00, заявл. 02.08.96; опубл. 06.02.98.
4. Авиационная радионавигация. Справочник под ред. А.А.Сосновского. М.: Транспорт, 1990, с. 194-197.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2001 |
|
RU2199719C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2000 |
|
RU2200961C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2006 |
|
RU2341774C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2003 |
|
RU2239203C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2267797C2 |
| ПОСАДОЧНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2556708C1 |
| Посадочный радиолокатор | 2019 |
|
RU2721785C1 |
| Посадочный радиолокатор | 2021 |
|
RU2779294C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
Изобретение относится к комплексам радиолокационной аппаратуры (КРА) взлета и посадки летательных аппаратов (ЛА) и может быть использовано в системах управления воздушным движением. Достигаемым техническим результатом изобретения является упрощение и удешевление КРА при эксплуатации двух соседних взлетно-посадочных полос (ВПП). В КРА, содержащем посадочный радиолокатор (ПЛР) с управляющим входом с антеннами курса и глиссады, имеющими частоту излучения f1, диспетчерский пульт с индикатором диспетчера и блоком управления, посадочный радиолокатор размещен между двумя соседними ВПП, снабжен дополнительными антеннами курса и глиссады, имеющими частоту излучения f2, в диспетчерский пульт введены дополнительный индикатор диспетчера и разделительный модем, блок управления выполнен с дополнительным выходом, соединенным с дополнительным управляющим входом ПРЛ. Предложен вариант КРА с использованием линий передачи данных земля-воздух. 2 с. и 2 з.п. ф-лы, 4 ил.
| Авиационная радионавигация | |||
| Справочник/Под ред | |||
| А.А.Сосновского | |||
| - М.: Транспорт, 1990, с.194-197 | |||
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПОЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ "БАГИС-С" | 1995 |
|
RU2108613C1 |
| US 6181987 А, 30.01.2001 | |||
| US 6012001 А, 04.01.2000 | |||
| Паровозный котел | 1928 |
|
SU10064A1 |

