Данное изобретение относится к высокоточному измерению угла поворота и, в частности, к тестированию функционирования вращающихся машин.
Предшествующий уровень техники
При обычном подходе к тестированию функционирования электродвигателей прежде всего проверяется функционирование двигателя в стационарном режиме после прекращения переходных процессов. С этой целью производится сбор данных о скорости двигателя в функции времени, которые фильтруются для удаления флуктуаций, с последующим расчетом стандартных характеристик функционирования двигателя в том виде, как они приведены, например, в соответствующих стандартах IEEE (Institute of Electrical and Electronics Engineers - Институт инженеров по электротехнике и радиоэлектронике). Такие характеристики перманентно связаны с техническими данными двигателя "крутящий момент - скорость" при отсутствии нагрузки, когда двигатель ускоряется из неподвижного состояния в условиях отсутствия нагрузки, и крутящий момент рассчитывается как функция производной по времени кривой скорости в соответствии со вторым законом Ньютона. Дополнительно проводятся так называемые сигнатурные тесты, а также тесты с нагрузкой, хотя во всех случаях явления флуктуации исключены.
Сигнатурное тестирование является продолжением проверки без нагрузки, которая использует более быстрые методики измерения и обработку для сравнения функционирования конкретного двигателя без нагрузки с функционированием предварительно откалиброванного "эталонного" двигателя, по которому могут оцениваться двигатели производственной линии. При тестах с нагрузкой определяется функционирование двигателя в рабочих условиях, когда в процессе испытания к работающему двигателю прикладывается конкретный крутящий момент, и измеряются результирующая скорость, ток и мощность.
В типовом случае скорость двигателя измеряется с использованием тахометра, присоединенного к оси двигателя. Такой способ делает возможным сбор данных о скорости двигателя в аналоговой форме. К недостаткам способа можно отнести низкое разрешение и наличие сильных шумов. По этой причине предпочтительными являются цифровые способы и в течение последних двух или трех десятилетий затрачены значительные усилия на пути повышения точности измерения скорости вращения валов двигателей и других параметров с использованием цифровых и дискретных методов. Подобные методы до сих пор используют аналоговые датчики для получения сигнала скорости с последующим преобразованием сигнала скорости в цифровую форму с использованием аналого-цифровых преобразователей (A/D - analog-to-digital) для осуществления последующей обработки в цифровой форме.
Р. Забадос (R. Szabados) и др. описывают такую методику в статье "Измерение характеристики асинхронных двигателей "крутящий момент - скорость" с использованием нового усовершенствованного цифрового подхода", опубликованной в сборнике "Вопросы по преобразованиям энергии", т.5, №3, в сентябре 1990. В приведенном в данной публикации способе для дискретного измерения выходного сигнала тахометра постоянного тока (d.c. - direct current), а также других искомых параметров, таких как ток и напряжение цепи, используется система быстрого сбора данных. Измеренные данные затем обрабатываются цифровым способом для удаления шума, фильтрации динамических средних значений для устранения посторонних вибраций межсоединений и определения соответственного профиля крутящего момента на основе производной по времени кривой изменения скорости с использованием закона Ньютона. Так как удаление шума также устраняет флуктуации, то получается, что устранение флуктуации путем фильтрации необработанных данных скорости является неотъемлемой отличительной особенностью предлагаемого в данной статье способа.
В статье далее говорится о том, что необработанные данные скорости загрязнены и первой задачей на стадии обработки данных является удаление посторонних сигналов без искажения профиля скорости. Основной вклад вышеупомянутой статьи заключается в представленных усовершенствованных алгоритмах фильтрации.
Патент США №5,218,860 (Сторар (Storar)), принадлежащий компании Automation Technology, Inc., описывает другой подход, при котором вместо измерения скорости с использованием аналоговых датчиков применяется цифровой инкрементный преобразователь углового положения. На фиг.1 наглядно показан испытательный стенд 10 для двигателя, где двигатель 11 механически присоединен к испытательной системе, соответствующей патенту США №5,218,860, посредством испытательной арматуры, состоящей из вращающегося вала 12, опирающегося на высококачественные подшипники 13. На валу 12 установлены маховик 14 с известной инерцией и цифровой преобразователь углового положения 15 с высокой разрешающей способностью. Маховик 14 работает как инерционная нагрузка, при этом крутящий момент может быть определен согласно уравнению
где Т = крутящий момент,
I = инерция маховика,
v = скорость,
t = время.
Как показано в патенте США №5,218,860, характеристики "крутящий момент - скорость" дискретно измеряются через известные равные временные интервалы в течение времени, которое требуется двигателю для достижения полной скорости из неподвижного состояния. Временной интервал измерения устанавливается кварцевым генератором и обычно составляет 16,67 мс, соответствуя периоду одного цикла в цепи питания 60 Гц. Изменение скорости определяется преобразователем углового положения, разрешение которого достигает величины 0,0072° углового перемещения. Крутящий момент и скорость вычисляются для каждого периода 16,67 мс от момента подачи питания до момента достижения двигателем максимальной скорости без нагрузки. Инерция прикрепленного к двигателю маховика выбирается таким образом, чтобы двигатель достигал полной скорости приблизительно за 4 секунды, причем это соответствует времени, которое требуется для выборки приблизительно 240 результатов измерения крутящего момента и скорости, достаточных для описания всей кривой "крутящий момент - скорость" от неподвижного состояния до полученной максимальной скорости.
Цифровой преобразователь углового положения, который описан в патенте США №5,218,860, представляет собой значительное усовершенствование аналоговых датчиков и делает возможным измерение некоторых характеристик двигателя, которые ранее получить было довольно трудно. Однако разрешающая способность устройства по-прежнему остается относительно низкой, так как в действительности во время каждого периода выборки усредняется очень большое количество импульсов. Более конкретно, в патенте США №5,218,860 указано, что импульсный преобразователь создает 25.000 импульсов во время каждого полного поворота вала двигателя. В предположении, что средняя скорость двигателя составляет 10.000 об/мин, это означает, что количество импульсов, сформированных за период времени 16,67 мс, составляет приблизительно 70.000. Фактическое количество импульсов подсчитывается двоичным счетчиком для обеспечения точного указания угловой скорости двигателя. Однако при таком большом периоде выборки как 16,67 мс, теряется возможность измерить флуктуации, в результате чего становится возможным определить лишь сглаженные характеристики. Кроме того, оказывается, что преимущества применения преобразователя углового положения с таким высоким разрешением сводятся на нет его высокой стоимостью при использовании такого грубого интервала выборки. Теоретически разрешение могло бы быть улучшено просто путем осуществления выборки через меньшие периоды времени. Однако на практике с использованием современной технологии это трудно осуществить с сохранением точности и без существенных затрат.
Кроме того, прикрепленный к двигательному валу маховик нагружает двигатель, и хотя это не влияет на статические параметры функционирования двигателя, это по существу устраняет флуктуации, которым подвержены переходные процессы. Следовательно, нагружение двигателя, как предлагается в патенте США №5,218,860, не позволяет определить его динамическое функционирование.
Автор настоящего изобретения обнаружил, что динамическое функционирование двигателя дает бесценную информацию о двигателе, так что без знания динамического функционирования двигателя невозможно определить его основополагающие свойства. Однако по изложенным выше причинам, данные динамического функционирования невозможно получить при столь большом периоде выборки как 16 мс, так как в течение этого периода времени большая часть флуктуации на переходном участке кривой теряется. Даже без учета реальной величины периода выборки и принимая в расчет, что некоторое усовершенствование, очевидно, может быть достигнуто путем уменьшения периода выборки при существующей технологии и ценовых ограничениях, любое усовершенствование является ограниченным по масштабам. Это следует из того факта, что подсчет импульсов в течение фиксированного периода времени, сколь угодно малого, никогда не даст возможности достичь оптимальных результатов. Таким образом, даже если период выборки может быть неограниченно уменьшен (что, конечно же, невозможно), он никогда не сможет стать меньше периода единичного импульса, так как, в таком случае, в течение периода выборки нельзя было бы получить никаких данных. С другой стороны, хотя увеличение периода выборки гарантирует получение данных выборки, это приводит к увеличению количества данных на одну выборку. Это означает, что достигнутое таким образом разрешение неизбежно меньше теоретического максимума.
Более того, чтобы получить достаточное количество точек выборки, используя подход, описанный в патенте США №5,218,860, необходимо гарантировать, что время, требующееся двигателю для достижения полной скорости, растягивается до нескольких секунд. Это достигается при помощи маховика, имеющего инерцию, достаточную для задержки перехода двигателя в стационарный режим. Очевидно, что было бы предпочтительным иметь возможность получать искомые характеристики скорости за меньшее время, не прибегая к компромиссу в отношении количества точек выборки и в то же время обеспечивая подробную информацию о флуктуациях в переходном состоянии, которые исчезают, когда двигатель находится под нагрузкой.
В патенте США №4,535,288, принадлежащем Джозефу Л. Витулли Мл. (Joseph L. Vitulli, Jr.), описан способ определения частоты вращения движущегося вала в пространственно ограниченной среде, где для определения скорости используется время между парой следующих друг за другом в непрерывной последовательности импульсов преобразователя углового положения (датчика). Дальнейшее значение частоты вращения вычисляется на основе последующей пары следующих друг за другом в непрерывной последовательности импульсов, которые имеют другую последовательность, нежели более ранние импульсы. Преобразователь углового положения, описанный Витулли, может быть уподоблен зубчатому колесу, имеющему шестьдесят расположенных на равном расстоянии друг от друга зубцов, каждый из которых дает увеличение выходного сигнала, имеющего первый уровень напряжения, когда при вращении проходит мимо первичного датчика. Когда мимо первичного датчика проходит промежуток между соседними зубцами, формируется выходной сигнал, имеющий второй уровень напряжения. В типовом случае первый и второй уровни напряжения переводятся в цифровые сигналы, имеющие логические уровни ВЫСОКИЙ и НИЗКИЙ соответственно, в результате чего создается серия импульсов. Таким образом, предполагая, что имеется шестьдесят расположенных на равном расстоянии друг от друга зубцов, которые дают одинаковый угол поворота для высокого и низкого уровней, угол поворота, соответствующий каждому логическому уровню ВЫСОКИЙ, равен 2π/120 радиан. В результате чего угловая скорость может быть рассчитана путем измерения длительности по времени каждого логического уровня ВЫСОКИЙ.
На практике, однако, даже самые лучшие преобразователи углового положения имеют точность рабочего цикла только ±10%, и это означает, что, хотя расстояние между началами соседних зубцов (соответствующее периоду серии импульсов) является постоянным, ширина каждого зубца подвержена изменению точности ±10%. Так как угловая скорость рассчитывается на основе измеренного времени для каждого зубца, проходящего первичный датчик, ясно, что она зависит от фактической ширины каждого зубца и, таким образом, подвержена максимальной ошибке в 20%.
В заявке JP 59 160766 (Фанук (Fanuc)) описывается устройство определения скорости, где скорость серводвигателя определяется с использованием преобразователя углового положения способом, схожим со способом, описанным в патенте США №4,535,288 и соответственно сопряженным с теми же проблемами, вызванными неточностями из-за ошибок рабочего цикла. Кроме того, в заявке отсутствуют предложения по испытанию машины без нагрузки.
В заявке GB 2 127 549 описывается испытательный стенд, служащий опорой для двигателя во время измерения его крутящего момента. Оказывается, что описанная там система очень похожа на систему по патенту США №5,218,860, рассмотренному несколько выше, и подвержена тем же недостаткам. Более конкретно, двигатель, чей крутящий момент в стационарном режиме и в переходном состоянии измеряется с использованием заявки GB 2 127 549, нагружается для снижения ускорения двигателя (нагружение двигателя вызывает исчезновение всех динамических явлений, о которых говорится в настоящей заявке). Из описания заявки GB 2 127 549 на стр.1, строки с 48 по 53 ясно, что такое нагружение необходимо для записи переходных характеристик двигателя "крутящий момент - скорость" в переходном состоянии, от нулевой до максимальной скорости. В дальнейшем станет очевидно, что снижение ускорения двигателя, как предложено в заявке GB 2 127 549, препятствует получению его переходных характеристик, чье точное определение которых является существенной отличительной особенностью настоящего изобретения.
В патенте США №4,169,371 (Витски (Witschi) и др.) описывается способ и устройство для измерения крутящего момента и/или мощности системы привода в динамическом режиме работы на основе дифференцирования по времени скорости системы привода для определения ускорения. Система нагружается и, таким образом, очевидно, что динамические характеристики, определение которых является главной задачей настоящего изобретения, теряются.
В патенте США №5,631,411 (Хармс (Harms) и др.) описывается устройство диагностики двигателя, которое рассчитывает его скорость. Из фиг.1 следует, что с двигателем соединена инерционная нагрузка (т.е. маховик) и, следовательно, в данном случае также теряются динамические характеристики, определение которых является главной задачей настоящего изобретения.
В заявке ЕР 457 086 описывается устройство для бесконтактного измерения локального тормозного момента в шнековой машине. В корпусе шнека размещены, по меньшей мере, два сенсора положения или бесконтактных переключателя. Во время вращения хвостовика шнека сенсоры сканируют поверхность хвостовика и на основе снятых характеристик генерируют измерительные импульсы, которые вместе с сигналом скорости могут поступать в схему электронного анализа, рассчитывающую локальный тормозной момент в сегменте хвостовика шнека в пределах пространства продукта. Данное устройство работает совместно с устройством для измерения общего крутящего момента, которое размещено между приводом шнекового хвостовика и пространством продукта шнековой машины. Здесь также отсутствует концепция измерения крутящего момента ненагруженной машины.
В патенте США №5,390,545 (Доэн (Doan)) описывается устройство для измерения вибрации при вращении для электродвигателей, к которым присоединяется колесо, имеющее множество расположенных на расстоянии друг от друга зубцов. Сенсор считывает скорость вращения колеса и в соответствии с этим формирует сигнал скорости, который имеет частоту, пропорциональную частоте вращения колеса. Устройство синхронизации принимает сигнал скорости, определяет период последнего импульса сигнала скорости и в соответствии с этим формирует мгновенное значение сигнала периода, которое имеет величину, характеризующую определяемый период.
В патенте США №4,992,730 (Хагья (Hagiya)) описывается способ вычисления скорости вращения вращающегося тела путем установки эталонных периодов времени вычисления скорости в соответствии с сигналом, состоящим из серии импульсов, полученным на основе выходного сигнала сенсора скорости вращения; измерения длины временного промежутка от фронта последнего импульса в предыдущем эталонном периоде времени вычисления скорости до фронта последнего импульса в текущем эталонном периоде времени вычисления скорости; и вычисления скорости вращения вращающегося тела на основе результата измерения длины временного промежутка.
Раскрытие изобретения
Задачей настоящего изобретения является разработка способа и устройства тестирования электрического двигателя, позволяющих свести к минимуму или полностью устранить вышеприведенные недостатки известных способов.
Данная задача решается тем, что в способе тестирования электрического двигателя или его компонента, согласно изобретению:
(a) измеряют динамическую характеристику "скорость-время" ненагруженного вращающегося электрического двигателя и
(b) получают производную во времени динамической характеристики "скорость-время" ненагруженного вращающегося электрического двигателя и умножают полученную производную на момент инерции ротора двигателя для получения статического соотношения "крутящий момент - скорость", или динамического соотношения "крутящий момент - скорость", или колеблющегося крутящего момента во время стационарного режима, или спектра скорости и крутящего момента во время стационарного режима работы ненагруженного вращающегося электрического двигателя.
Данная задача решается также тем, что в способе тестирования электрической машины, содержащей электрический двигатель и присоединенную нагрузку, согласно изобретению:
(a) измеряют динамическую характеристику "скорость-время" вращающегося электрического двигателя с нагрузкой во время ускорения электрического двигателя с нулевой скорости до момента достижения максимальной скорости и
(b) получают производную во времени динамической характеристики "скорость-время" вращающегося электрического двигателя с нагрузкой и умножают полученную производную на момент инерции электрического двигателя с нагрузкой для получения статического соотношения крутящий момент - скорость", или соотношения "колеблющийся крутящий момент - скорость" в стационарном режиме, или спектра в стационарном режиме крутящего момента вращающегося электрического двигателя с нагрузкой, где крутящий момент электрического двигателя с нагрузкой равен крутящему моменту электрического двигателя за вычетом крутящего момента нагрузки.
Поставленная задача решается также тем, что в устройстве для измерения угла поворота вращающегося электрического двигателя или его компонента, содержащем
узел соединения для прикрепления вала электрического двигателя к цифровому преобразователю углового положения для точного измерения угла поворота вала,
источник питания для подачи питания на вращающийся электрический двигатель в заданное время и
компьютер, присоединенный к цифровому преобразователю углового положения для получения характеристики скорости вращающегося электрического двигателя, согласно изобретению:
источник питания вырабатывает энергию для ускорения электрического двигателя от нулевой скорости до максимального значения скорости, при этом компьютер выполнен с возможностью измерения динамической характеристики "скорость-время" ненагруженного вращающегося электрического двигателя, соответствующей характеристике "скорость-время" в процессе вращения от нулевой до максимальной скорости, получения производной во времени динамической характеристики "скорость-время" ненагруженного вращающегося электрического двигателя и умножения ее на момент инерции двигателя для получения статического соотношения "крутящий момент - скорость", или динамического соотношения "крутящий момент - скорость", или колеблющегося крутящего момента во время стационарного режима, или спектра скорости и крутящего момента во время стационарного режима работы ненагруженного вращающегося электрического двигателя.
Поставленная задача решается также тем, что в устройстве для тестирования вращающегося электрического двигателя с нагрузкой, содержащем:
узел соединения для присоединения вала вращающегося электрического двигателя с нагрузкой к цифровому преобразователю углового положения,
источник питания для подачи питания на вращающийся электрический двигатель и
компьютер, присоединенный к цифровому преобразователю углового положения для получения характеристики скорости вращающегося электрического двигателя,
согласно изобретению:
источник питания вырабатывает энергию для ускорения двигателя от нулевой скорости до максимального значения скорости,
компьютер выполнен с возможностью измерения динамической характеристики скорости вращающегося электрического двигателя с нагрузкой, соответствующей характеристике "скорость-время" в процессе вращения от нулевой скорости до максимального значения скорости, получения производной во времени динамической характеристики "скорость-время" вращающегося электрического двигателя с нагрузкой и умножения ее на момент инерции двигателя с нагрузкой для получения статического соотношения "крутящий момент - скорость", или соотношения "колеблющиеся крутящий момент - скорость" в стационарном режиме, или спектра скорости в стационарном режиме, или спектра крутящего момента вращающегося электрического двигателя с нагрузкой в стационарном режиме, где крутящий момент электрического двигателя с нагрузкой равен крутящему моменту электрического двигателя за вычетом крутящего момента нагрузки.
Таким образом, в дальнейшем станет понятно, что способ и устройство, соответствующие данному изобретению, позволяют получить динамические и статические данные функционирования без необходимости присоединения к оси машины внешней инерционной нагрузки. Это делает возможным более быстрое достижение электрической машиной стационарного (т.е. не переходного) режима работы и позволяет быстрее осуществлять его калибровку. Это имеет особое значение при массовом производстве небольших машин и необходимости их тестирования на производственной линии. Кроме того, это делает возможным измерение флуктуаций, которые до сих пор не поддавались измерению.
В патенте США №5,218,860 (столбец 1, строка 29) обоснованно утверждается, что для больших двигателей масса ротора может быть достаточно большой, чтобы обеспечить должную инерционную нагрузку. То есть в патенте США №5,218,860 также допускается возможность обойтись без внешней инерционной нагрузки, хотя только для больших двигателей. Однако это может быть сделано лишь потому, что большим двигателям, которые неизбежно инерционны, в любом случае требуется относительно больше времени для достижения скорости стационарного режима, в результате чего становится возможным получить достаточное количество точек выборки. Это условие не выполняется для небольших низкоинерционных двигателей, в отношении которых, согласно патенту США №5,218,860, внешняя инерционная нагрузка является обязательной для того, чтобы сознательно увеличить время достижения скорости стационарного режима и, следовательно, иметь возможность получить достаточное количество точек выборки. Таким образом, ясно, что патент США №5,218,860 не позволяет на его основе закономерно перейти к настоящему изобретению, которое позволяет обойтись без маховика даже в случае небольших двигателей, так как основной задачей данного изобретения является уменьшение, а не увеличение времени достижения скорости стационарного режима.
Данное изобретение также делает возможным измерение колеблющихся момента и скорости в условиях стационарного режима для получения характеристик "скорость-время" и "крутящий момент - время" как во временной, так и в частотной областях. В подобном случае для увеличения времени, требующегося машине для достижения стационарного режима, может быть использован маховик, в результате чего в процессе ускорения возникает явление колеблющихся крутящего момента и скорости стационарного режима. Это позволяет выявить дефекты машины, которые в ином случае не были бы заметными.
Данное изобретение также допускает большую гибкость в тестировании вращающейся машины. Пользователь может управлять продолжительностью времени выборки и моментом начала выборки. Пользователь может также управлять осью x (время и частота) и осью у (крутящий момент и скорость), таким образом, делая возможным использование устройства в качестве анализатора электродвигателей.
Краткое описание чертежей
Для лучшего понимания данного изобретения и с целью показать, как оно может быть практически реализовано, ниже в виде примера, не ограничивающего объем изобретения, будет описан предпочтительный вариант его осуществления со ссылкой на сопровождающие фигуры чертежей, в числе которых:
Фиг.1 изображает испытательный стенд для двигателей, соответствующий существующему уровню техники;
Фиг.2 - блок-схему испытательной системы для двигателей согласно данному изобретению;
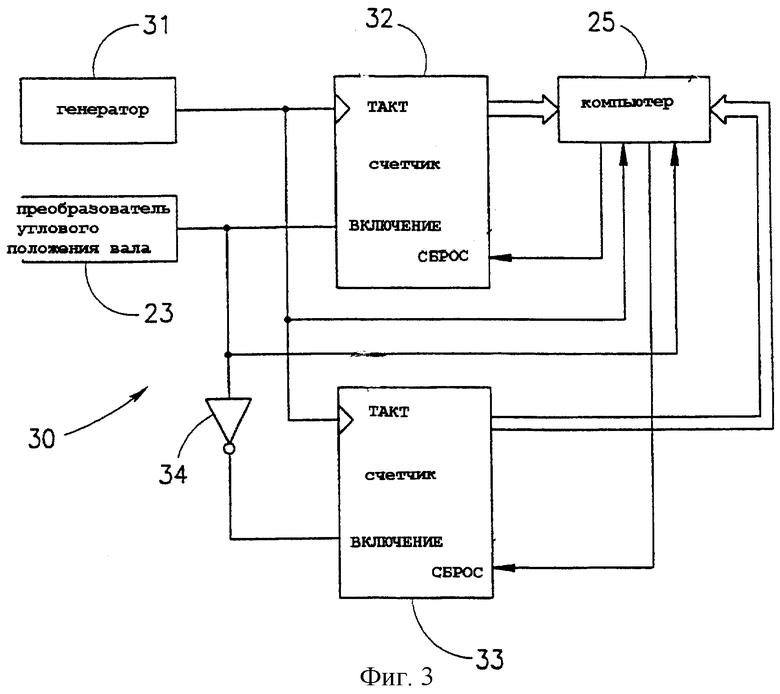
Фиг.3 - блок-схему, демонстрирующую более подробно некоторые компоненты испытательной системы для двигателей, изображенной на фиг.2;
Фиг.4 - блок-схему, демонстрирующую главные этапы работы испытательной системы для двигателей, показанной на фиг.2;
Фиг.5 - 13 - характеристики типового PSC асинхронного двигателя переменного тока, измеренных или вычисленных с использованием испытательной системы для двигателей, соответствующей данному изобретению;
Фиг.14 - 19 - графики вариантов применения данного изобретения для выявления дефектов в условиях стационарного режима;
Фиг.20 - 23 - графики вариантов применения данного изобретения для выявления дефектов вентилятора системы кондиционирования воздуха и
Фиг.24 - функциональную блок-схему анализатора динамических крутящего момента и скорости для получения визуального изображения характеристик скорости или крутящего момента вращающегося вала, полученных в соответствии с данным изобретением.
Варианты осуществления изобретения
На фиг.2 изображена функциональная схема испытательной системы для двигателей, обозначенной цифровой позицией 20 и содержащей асинхронный двигатель 21, вал 22 которого соединен с цифровым преобразователем 23 положения вала известного типа. Преобразователь 23 положения вала не требует очень высокой разрешающей способности и на практике может генерировать 5.000 импульсов за один оборот вала двигателя. По мере того как двигатель 21 вращается, преобразователь 23 положения вала генерирует сигналы с логическими уровнями, которые выбираются блоком выборки 24, измеряющим время, проходящее между изменениями логических состояний с уровня НИЗКИЙ до уровня ВЫСОКИЙ и обратно на уровень НИЗКИЙ или наоборот. Непрерывно следующие друг за другом временные интервалы подаются в компьютер 25, который обрабатывает данные времени таким образом, чтобы получить динамическую характеристику скорости двигателя 21 как функцию прошедшего времени и сохранить ее в памяти. Двигатель 21 включается через блок управления 26, который с возможностью управления соединен с компьютером 25 так, что, например, запитывание двигателя 21 может быть прервано, если он достиг полной скорости стационарного режима, что свидетельствует о завершении процедуры теста. С компьютером соединено устройство отображения 27, например монитор или графопостроитель. Двигатель 21 получает энергию от источника питания 28, который может включаться в точно известное время.
На фиг.3 показана схема синхронизации 30 в блоке выборки 24, которая содержит генератор 31, подключенный к входному контакту ТАКТ (CLK - clock) первого счетчика 32 и второго счетчика 33. Выходной сигнал преобразователя положения вала 22 подается на входной контакт включение первого счетчика 32, сигнал с выхода которого подается в компьютер 25. Выходной сигнал преобразователя положения вала инвертируется инвертором 34 и подается на входной контакт ВКЛЮЧЕНИЕ второго счетчика 33, выходной сигнал которого также подается в компьютер 25. Подобным же образом контакт сброс первого счетчика 32 с возможностью управления соединен с компьютером 25, и контакт СБРОС второго счетчика 33 с возможностью управления соединен с компьютером 25, чтобы таким образом позволить произвести сброс первого счетчика 32 и второго счетчика 33, как будет показано ниже.
Схема синхронизации 30 работает следующим образом. Генератор 31 на основе кварцевого кристалла генерирует высокочастотные импульсы, имеющие известную и стабильную частоту. По мере того как преобразователь 23 положения вала вращается вместе с валом двигателя, он создает последовательные противоположные уровни двоичных логических состояний ВЫСОКИЙ и НИЗКИЙ более низкой частоты, чем частота генератора 31. Относительно низкочастотные логические уровни, генерируемые преобразователем 23 положения вала, подаются на контакт ВКЛЮЧЕНИЕ первого счетчика 32 и после инвертирования подаются на контакт ВКЛЮЧЕНИЕ второго счетчика 33. Следовательно, между следующими друг за другом сигналами ВКЛЮЧЕНИЕ первый счетчик 32 измеряет количество относительно высокочастотных импульсов, генерированных генератором 31, когда преобразователь имеет логический уровень ВЫСОКИЙ, а второй счетчик 33 измеряет количество относительно высокочастотных импульсов, генерированных генератором 31, когда преобразователь имеет логический уровень НИЗКИЙ, при этом оба результата подаются в компьютер 25. Компьютер 25 реагирует на изменение в состоянии сигнала ВКЛЮЧЕНИЕ первого счетчика для считывания данных на соответствующих выходных контактах первого счетчика 32 и второго счетчика 33 и подачи сигнала сброса на их соответствующие входные контакты СБРОС. В результате происходит очистка или установка в начальное состояние первого счетчика 32, когда преобразователь имеет логический уровень НИЗКИЙ, и очистка второго счетчика 33, когда преобразователь имеет логический уровень ВЫСОКИЙ. Таким образом, выходной сигнал первого счетчика 32 между следующими друг за другом сигналами включение точно характеризует время, пока преобразователь 23 положения вала оставался на логическом уровне ВЫСОКИЙ. Подобным же образом выходной сигнал второго счетчика 33 между следующими друг за другом сигналами ВКЛЮЧЕНИЕ точно характеризует время, пока преобразователь 23 положения вала оставался на логическом уровне НИЗКИЙ.
Даже допуская, что преобразователь 23 положения вала имеет разрешающую способность не более 5.000 импульсов на оборот, а скорость двигателя 21 составляет всего лишь 1.000 об/мин, преобразователь 23 положения вала будет вырабатывать 5 миллионов импульсов в минуту. Таким образом, каждый импульс имеет период приблизительно 10 мкс, который гарантированно находится в пределах емкости счетчика 32, необходимой для проведения точных измерений. Кроме того, по сравнению с системой, описанной в вышеупомянутом патенте США №5,218,860, во временном интервале 16,67 мс преобразователь 23 положения вала будет вырабатывать приблизительно 1.667 импульсов, каждый из которых является точкой выборки, в противоположность одной точке выборки, описанной в патенте США №5,218,860.
Так как патент США №5,218,860 связывает измерение времени с несколькими сотнями импульсов, любая ошибка рабочего цикла, связанная с каждым импульсом, эффективно устраняется, хотя и ценой использования гораздо более продолжительного временного интервала для измерения накопленного угла поворота вала. Как будет показано выше, это препятствует определению динамической реакции машины.
С другой стороны, в патенте США №4,535,288, принадлежащем Джозефу Л. Витулли Мл., предлагается проводить измерение времени только единичного импульса и, следовательно, на первый взгляд, делается возможным определение динамической реакции. Однако, как уже отмечалось, его подход подвержен ошибкам рабочего цикла, которые для большей ясности будут теперь рассмотрены более подробно. Изготовитель преобразователя углового положения указывает количество импульсов на оборот преобразователя углового положения, а также указывает рабочий цикл. Если рабочий цикл указывается как 50%, тогда время для каждого импульса, измеренного Витулли Мл., в действительности соответствует половине номинального приращения угла во время каждого импульса преобразователя. Например, если имеется 3.600 импульсов на оборот, это соответствует десяти импульсам на градус поворота преобразователя. Витулли Мл. измеряет время для одного номинального полуцикла единичного импульса и из этого рассчитывает номинальный период времени каждого импульса преобразователя, исходя из рабочего цикла, указанного изготовителем. Однако такой путь приведет к неточностям из-за неизбежных ошибок в рабочем цикле, указанном изготовителем, которые в настоящее время составляют порядка ±10%.
Таким образом, хотя Витулли Мл. предоставляет номинальный угол поворота в одном импульсе преобразователя углового положения, в результате делая возможным расчет угловой скорости во время единичного импульса, реальный результат является неточным.
Фиг.4 представляет блок-схему, демонстрирующую работу испытательной системы 20 для двигателей. Вначале двигатель 21 включается и производится выборка выходного сигнала преобразователя 23 положения вала, как было показано выше. Выбранные данные собираются и обрабатываются компьютером 25, обработанные данные выводятся на устройство отображения 27. Любое отклонение от приемлемого функционирования рассчитывается и дает возможность компьютеру 25 вывести предупреждающий сигнал для предупреждения о дефектности двигателя. Такой предупреждающий сигнал может быть известным способом выполнен звуковым или визуальным. В качестве варианта, как будет более подробно рассмотрено ниже, флуктуации при переходных явлениях, возникших во время ускорения двигателя 21, могут быть устранены для создания традиционной статической характеристики скорости.
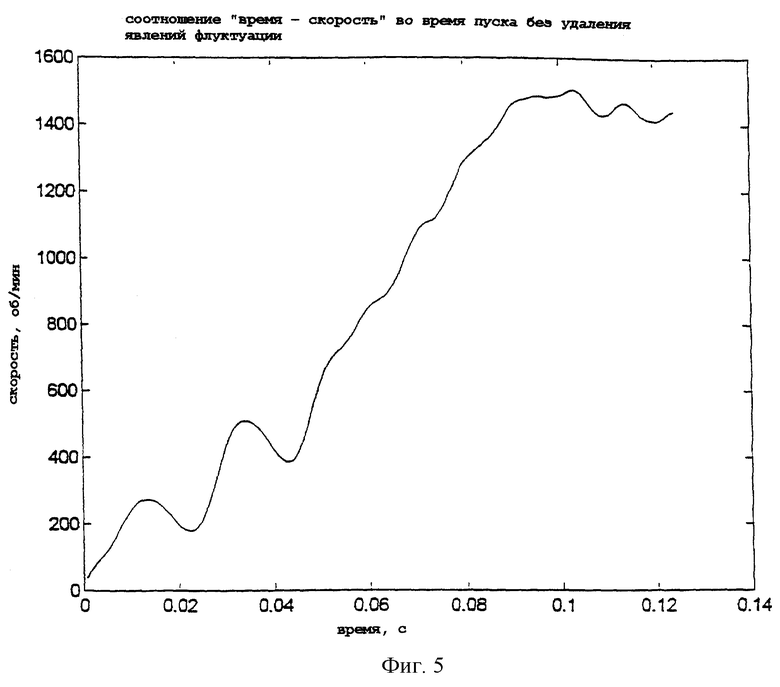
На фиг.5 представлено графическое изображение динамической характеристики скорости двигателя для PSC асинхронного двигателя переменного тока, которая вычислена на основе измеренных непрерывно следующих друг за другом временных периодов импульсов, сформированных преобразователем 23 положения вала. Следовательно, может быть рассчитано приращение скорости двигателя между непрерывно следующими друг за другом импульсами, так как известен угол поворота, соразмерный каждому импульсу. Замечено, что скорость двигателя и, следовательно, крутящий момент не являются непрерывно возрастающими с течением времени, а поднимаются и затем падают на короткое время, после чего снова поднимаются. После приблизительно 0,04 секунды этот эффект прекращается и скорость и крутящий момент двигателя растут со временем до тех пор, пока не приблизятся к условиям стационарного режима. В частности, необходимо отметить, что даже когда двигатель достигает стационарного режима, по-прежнему в его скорости имеются непрерывные флуктуации. Эти флуктуации заметны только при измерении угла поворота как функции периода импульса преобразователя углового положения и полностью теряются в предлагавшихся до сих пор способах, основанных на усреднении данных по большому количеству импульсов.
Уже отмечалось, что в присоединении к двигателю 21 маховика нет необходимости. Вместо этого крутящий момент двигателя может быть рассчитан в соответствии с законом Ньютона, исходя из знания момента инерции ротора, следующим образом:

где M(t) = мгновенный крутящий момент в момент времени t,
Q = момент инерции ротора,
w = угловая скорость двигателя и
L(t) = мгновенная внешняя нагрузка в момент времени t.
Так как к двигателю 21 нагрузка не присоединена, L(t) равно нулю и уравнение (2) упрощается до


На фиг.6 представлено графическое изображение характеристики крутящего момента при пуске, которые получены из характеристик скорости двигателя 21 следующим образом. Двигатель 21 работает без какой бы то ни было внешней нагрузки, и динамическая характеристика скорости рассчитывается и сохраняется в компьютере 25. Затем рассчитывается производная по времени динамической характеристики скорости и результат умножается на известный момент инерции ротора. Ввиду того что скорость определяется в об/мин, результат далее должен быть умножен на коэффициент 2π/60 для преобразования в эквивалентную угловую скорость в радианах в секунду, соответствующую динамическому крутящему моменту от запуска ненагруженного двигателя до достижения им полной скорости. Эта характеристика является повторно воспроизводимой при соблюдении условия, что двигатель всегда будет запускаться в заранее определенной точке цикла переменного напряжения источника питания. Например, в конкретной системе, реализуемой на практике, двигатель запускался в точке цикла, в которой напряжение при подъеме проходило через 0 вольт.
Характеристика крутящего момента двигателя без нагрузки при пуске, показанная на фиг.6, делает возможным определение его динамических характеристик, которые невозможно получить с использованием обычных систем, предоставляющих только статические характеристики скорости и крутящего момента. Динамические характеристики позволяют распознать дефекты двигателя, не обнаруживаемые на основе только статических данных, а также позволяют классифицировать характеристики. Кроме того, обнаружено, что:
(i) динамическая характеристика крутящего момента дает информацию об амплитуде шума в крутящем моменте двигателя во время его ускорения; и подобным же образом дает информацию об интенсивности механического шума в двигателе, возникающего из-за изменений в крутящем моменте во время ускорения;
(ii) динамическая характеристика крутящего момента дает информацию о любом дисбалансе во вращающихся частях двигателя;
(iii) динамическая характеристика крутящего момента предоставляет особо чувствительный диагностический инструмент для распознавания дефектов двигателя.
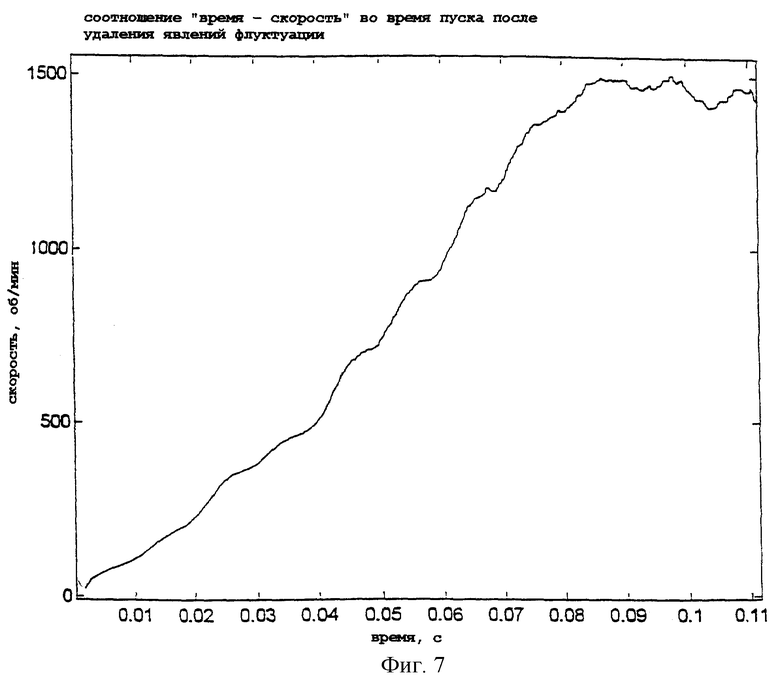
В вышеприведенной части описания делался акцент на рассмотрении динамических характеристик двигателя во время пуска. Однако, если необходимо, флуктуации в переходных явлениях могут быть удалены для предоставления сглаженной характеристики "скорость-время", графическое изображение которой представлено на фиг.7, из которой может быть получена известная характеристика "крутящий момент - скорость" (показана на фиг.11). Удаление флуктуации в переходных явлениях может быть достигнуто несколькими способами. Вал двигателя может быть механически заблокирован и освобожден только тогда, когда ток статора достигает значения стационарного режима. По другому варианту, если двигатель 21 является асинхронным, по типу относящимся к PSC, где статор содержит основную обмотку и дополнительную обмотку, которая может включаться параллельно с основной, в этом случае ротор будет вращаться, только когда ток подается в обе обмотки. Таким образом, вначале ток подается только в основную обмотку, а дополнительная обмотка включается в цепь, только когда токи в основной обмотке стабилизировались. Необходимо отметить, что как основная, так и дополнительная обмотки статора включаются в цепь, только когда напряжение источника переменного тока становится равным нулю при его возрастании. В более общем случае, повторяемость может гарантироваться путем подачи питания при любом другом известном угле цикла переменного напряжения источника.
Еще одним способом нейтрализации флуктуации переходных процессов является обработка динамической характеристики скорости двигателя с использованием подходящего алгоритма. С этой целью производится выборка динамической характеристики скорости, показанной на фиг.5, чтобы определить изменение скорости как функции времени при ускорении двигателя. Результирующий сигнал посредством преобразования Фурье переводится из временной области в частотную для получения спектра частот. Спектр частот фильтруется для удаления гармоник более высокой частоты, и результирующий спектр переводится обратно во временную область. В этой связи необходимо отметить, что получение спектра частот становится возможным благодаря тому факту, что разрешение по времени во временной области является достаточно высоким. Предлагавшиеся до сих пор способы, использующие низкое разрешение по времени, не способны обеспечить получение спектра частот.
Еще один подход к сведению на нет флуктуации на переходных участках тока статора состоит во вращении вала в направлении, противоположном нормальному, а затем в момент смены направления вращения проведении выборки характеристик ускорения (т.е. скорость - время). Такая методика хорошо известна и описана, например, в патенте США №5,440,915, также принадлежащем компании Automation Technology, Inc, и озаглавленном "Способ и устройство для измерения тормозного момента". Последующая обработка сходна с описанной выше обработкой для получения динамической характеристики скорости, но создает статическую характеристику скорости, так как переходный компонент более не присутствует.
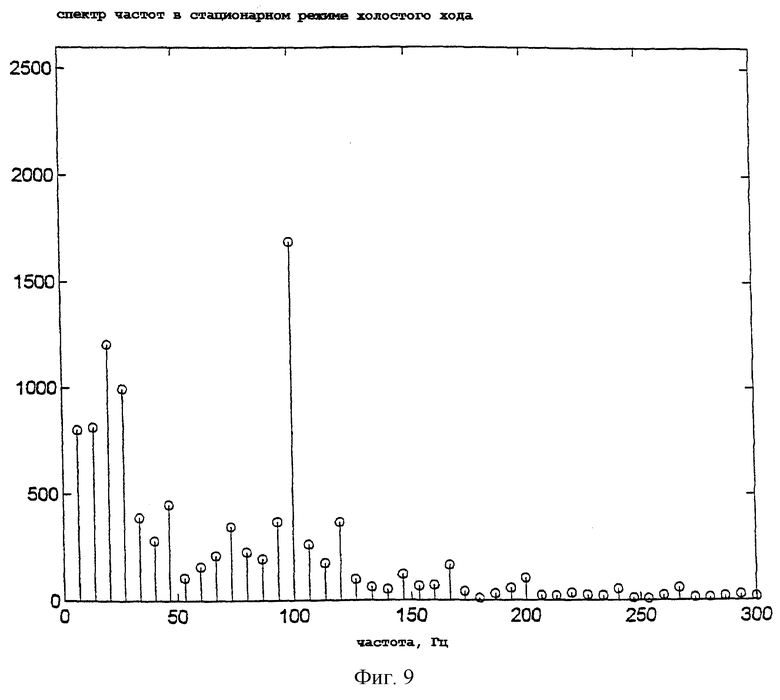
На фиг.8 представлено графическое изображение изменения скорости для ненагруженного 4-полюсного PSC асинхронного двигателя, работающего на холостом ходу в стационарном режиме. На фиг.9 показан результат перевода характеристик скорости двигателя в частотную область. Спектр частот, показанный на фиг.9, дает более четкую информацию о двигателе, по сравнению с информацией, полученной с использованием временной области. Более конкретно, обеспечивается более четкая информация, касающаяся флуктуации крутящего момента и скорости.
Момент инерции ротора может быть определен путем расчета двух отдельных характеристик скорости: одной для ненагруженного двигателя и другой в условиях, когда к валу двигателя приложена известная инерционная нагрузка. Таким образом, выполняются следующие этапы:
(i) получение характеристики "скорость-время" ненагруженного двигателя и устранение явлений флуктуации на ее переходных участках,
(ii) присоединение к двигателю инерционной нагрузки с известным моментом инерции,
(iii) получение характеристики "скорость-время" нагруженного двигателя и устранение явлений флуктуации на ее переходных участках и
(iv) обработка соответственных характеристик скорости, полученных на этапах (i) и (iii), для определения момента инерции ротора.
Расчеты основаны на следующих уравнениях.
Для ненагруженного двигателя

где Mmax - максимальный крутящий момент двигателя,
Q - момент инерции ротора двигателя (должен быть рассчитан) и
w - угловая скорость двигателя.
Для двигателя, нагруженного известной инерционной нагрузкой Θ1,


Максимальный крутящий момент двигателя (Мmах) является постоянным и не зависит от приложенной к нему нагрузки. Следовательно,

из чего можно получить, что

Испытательная система 10 для двигателей также позволяет получить его пульсирующий крутящий момент на холостом ходу, т.е. в условиях стационарного режима без нагрузки. Например, таким образом может быть определена величина интенсивности магнитного шума, создаваемого PSC асинхронным двигателем переменного тока на холостом ходу. На холостом ходу двигатель работает по существу на постоянной скорости, на которую наложена слабая пульсация за счет изменения крутящих моментов, созданных меняющимся вращающимся магнитным полем.
На фиг.10 представлено графическое изображение произведения производной по времени характеристики "скорость - время" и момента инерции ротора, которое служит показателем интенсивности изменения крутящего момента, созданного двигателем на холостом ходу в условиях стационарного режима.
Испытательная система 10 для двигателей также позволяет получить изменяющийся крутящий момент нагруженного двигателя на рабочей скорости, обеспечивающий, например, получение величины интенсивности магнитного шума, производимого двигателем, функционирующим на рабочей скорости. Подобным же образом это обеспечивает получение величины интенсивности механического шума, возникающего из-за противодействий нагрузке, происходящих в результате вариаций в крутящем моменте. Скорость двигателя и приложенная нагрузка меняются из-за вариаций крутящего момента, обусловленных:
(i) двигателем,
(ii) нагрузкой и
(iii) плохим соединением между ними.
Произведение производной по времени характеристики скорости и суммы момента инерции ротора и момента инерции внешней нагрузки предоставляет информацию об интенсивности изменения крутящего момента, созданного нагруженным двигателем, функционирующим на рабочей скорости. Меняющийся крутящий момент также предоставляет информацию о величине интенсивности электрического и механического шума в условиях работы нагруженного двигателя.
На фиг.11 представлено графическое изображение статической характеристики "крутящий момент - скорость" ненагруженного двигателя. В конце каждого производственного цикла к двигателю присоединяется внешняя нагрузка и определяются характеристики "скорость-время" нагруженного двигателя. Производная по времени этой кривой после исключения переходных процессов и последующего умножения на суммарный момент инерции ротора и внешней нагрузки вместе взятых дает статическую характеристику "крутящий момент - скорость" для двигателя без нагрузки. Это может быть продемонстрировано следующим образом:

где М - крутящий момент ненагруженного двигателя,
Q1 - момент инерции ротора,
QL - момент инерции внешней нагрузки и
ML - крутящий момент нагрузки.
На фиг.12 представлено графическое изображение статической характеристики "крутящий момент - скорость", показанной на фиг.11, совместно с характеристикой "скорость - крутящий момент" нагрузки МL, которая представляет собой вентилятор кондиционера. Для такой нагрузки характеристика "скорость - крутящий момент" в основном имеет параболическую форму, проходит через точку начала координат и пересекает характеристику "крутящий момент - скорость" двигателя в точке его фактической рабочей скорости. На фиг.13 построен график разницы между характеристикой "крутящий момент - скорость" двигателя, показанной на фиг.11, и характеристикой "крутящий момент - скорость" нагрузки, показанной на фиг.12, выраженной соотношением

График, показанный на фиг.13, получается при ускорении двигателя от момента запуска до достижения его полной рабочей скорости под нагрузкой. Эта характеристика является повторно воспроизводимой для сходных нагруженных двигателей при условии, что двигатель запускается в момент нахождения переменного напряжения источника в той же самой точке цикла. Например, в конкретной системе, реализуемой на практике, двигатель запускался в точке цикла, в которой напряжение при подъеме проходило через 0 вольт. Таким образом, характеристика, показанная на фиг.13, служит превосходным инструментом для осуществления теста "годен - не годен" для партии сходных нагруженных двигателей с целью выявления, какие из пар двигатель-нагрузка (кондиционер, водяные насосы и т.д.) отвечают техническим требованиям, предъявляемым к конструкции. Необходимо отметить, что использование характеристики, показанной на фиг.13, для установления функциональных возможностей нагруженной машины до настоящего времени не известно.
После вычисления характеристики "крутящий момент - скорость" для нагруженного двигателя, показанной на фиг.13, из нее может быть вычтена статическая характеристика "крутящий момент - скорость" двигателя, показанная на фиг.11 и 12, для того чтобы получить характеристику "крутящий момент - скорость" нагрузки, которая графически показана на фиг.12.
Перед удалением флуктуации на переходном участке характеристика "крутящий момент - скорость" пускового состояния нагруженного двигателя в общем случае имеет форму, схожую с формой характеристики ненагруженного двигателя, показанной на фиг.6, и получается следующим образом. Динамическая характеристика скорости получается именно так, как рассмотрено выше, после чего вычисляется ее производная по времени. Умножение производной по времени на суммарный момент инерции ротора и внешней нагрузки вместе взятых дает динамическую характеристику "крутящий момент - скорость" двигателя без нагрузки, как видно из уравнения (5). Таким образом, данная характеристика служит превосходным инструментом для сравнения динамического функционирования партии сходных двигателей.
Необходимо отметить, что использование этой характеристики для установления функциональных возможностей нагруженного двигателя и получения информации о магнитном шуме двигателя с нагрузкой во время ускорения с момента запуска до настоящего времени не известно. Подобным же образом, не известно использование этой характеристики для получения информации о механическом шуме, возникающем из-за вариаций в нарастании крутящего момента с момента запуска.
В нормальных рабочих условиях нагруженного двигателя двигатель и нагрузка вращаются со скоростью, которая слегка меняется из-за вариаций в крутящем моменте, обусловленных
(i) двигателем,
(ii) нагрузкой и
(iii) плохим соединением между ними.
Произведение производной по времени характеристики скорости и суммы момента инерции ротора и момента инерции внешней нагрузки предоставляет информацию об интенсивности изменения крутящего момента, созданного нагруженным двигателем, функционирующим на рабочей скорости. Меняющийся крутящий момент также предоставляет информацию о величине интенсивности электрического и механического шума в условиях работы нагруженного двигателя.
Большинство описанных выше тестов относятся к двигателю в целом, нагруженному или ненагруженному. Однако данное изобретение также рассматривает тестирование компонентов машины путем сравнения с условной "эталонной" машиной. Например, для тестирования различных роторов используется предварительно откалиброванный статор с высокими техническими характеристиками, и описанные выше тесты могут быть выполнены для получения как статических, так и динамических данных функционирования двигателя. Путем повторения этих тестов для того же самого двигателя с использованием различных роторов может производиться сравнение функционирования роторов. Подобным же образом при использовании предварительно откалиброванного ротора с высокими техническими характеристиками и смене различных статоров может производиться сравнение функционирования статоров.
Итак, описанные способы относятся к измерениям на переходном участке характеристик "скорость-время" или "скорость - крутящий момент" от запуска машины до достижения стационарного режима. Таким образом, при помощи измерения фактического времени каждого импульса продемонстрировано, что характеристики "скорость-время" или "скорость - крутящий момент" могут быть определены с гораздо более высоким разрешением, чем может быть достигнуто путем измерения среднего поворота в фиксированный период времени. В результате также могут быть определены флуктуации, возникающие на переходном участке характеристик двигателя, таким образом предоставляя информацию о функционировании двигателя, которую не удавалось получить при использовании предлагавшихся до сих пор подходов.
Также показано, что, даже когда ненагруженная машина достигает стационарного режима, номинально постоянная скорость или крутящий момент также подвержены возмущениям или пульсации, возможность измерять которые появляется только при определении характеристик согласно данному изобретению.
Однако автор настоящего изобретения обнаружил что, даже когда нагруженная машина достигает стационарного режима в реальных рабочих условиях, номинально постоянная скорость или крутящий момент также подвержены возмущениям или пульсации, возможность измерять которые появляется только при определении характеристик согласно данному изобретению. Это также предоставляет бесценную информацию, которая полностью теряется, когда характеристики "скорость-время" или "скорость - крутящий момент" рассчитываются с использованием традиционных способов. В этом случае, разумеется, нет необходимости измерять скорость машины от момента запуска и более не требуется для машины переменного тока информация момента подачи питания на двигатель в цикле переменного напряжения. Необходимо лишь измерить характеристику машины "скорость-время" после достижения стационарного режима в реальном масштабе времени для того, чтобы рассчитать в реальном масштабе времени динамическую характеристику машины "скорость-время" в стационарном режиме. Обнаружено, что номинально постоянная скорость имеет динамический компонент пульсации, который служит ценным индикатором функционирования двигателя и приложенной нагрузки. Более конкретно, слишком большая пульсация показывает, что работающий двигатель функционирует неправильно и, следовательно, величина пульсации служит критерием того, приемлемо или нет функционирование работающего двигателя. Следовательно, при постоянном контроле функционирования в стационарном режиме нагруженного двигателя в рабочих условиях и сравнении величины компонента пульсации с заранее определенным порогом в случае, если нагруженный двигатель или любой из его компонентов не отвечает техническим требованиям, предъявляемым к конструкции, может быть выдано предупреждение.
Данное изобретение также делает возможным измерение колеблющихся крутящего момента и скорости в условиях стационарного режима для того, чтобы получить характеристики "скорость-время" и "крутящий момент - время" как во временной, так и в частотной областях. В этом случае можно либо ждать до тех пор, пока вращающийся вал не достигнет своей скорости стационарного режима, либо, в ином случае, присоединить к вращающемуся валу высокоинерционный маховик, чтобы умышленно увеличить время достижения стационарного режима. В таком случае при ускорении появятся явления колеблющихся крутящего момента и скорости стационарного режима, причем это становится заметно благодаря тому факту, что имеется гораздо больше точек выборки, чем в предлагавшихся до сих пор испытательных стендах. Обнаружено, что динамическая пульсация выявляет дефекты машины, которые в ином случае не были бы заметными.
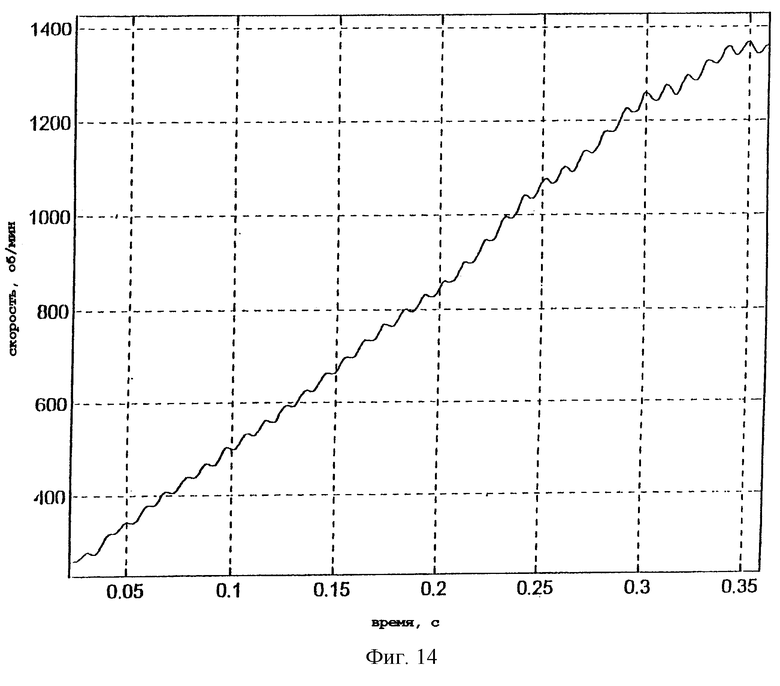
На фиг.14 показаны характеристики двигателя "скорость-время", когда к его валу присоединен маховик, имеющий большой момент инерции. Скорость двигателя медленно увеличивается от нуля, достигая скорости холостого хода спустя приблизительно 0,35 с, по сравнению с 0,1 с без маховика. Можно заметить, что на характеристики "скорость-время" стационарного режима наложены колебания, отражающие небольшие изменения скорости двигателя в стационарном режиме. Они всегда присутствуют, но не заметны, когда скорость двигателя достигает скорости стационарного режима быстро.
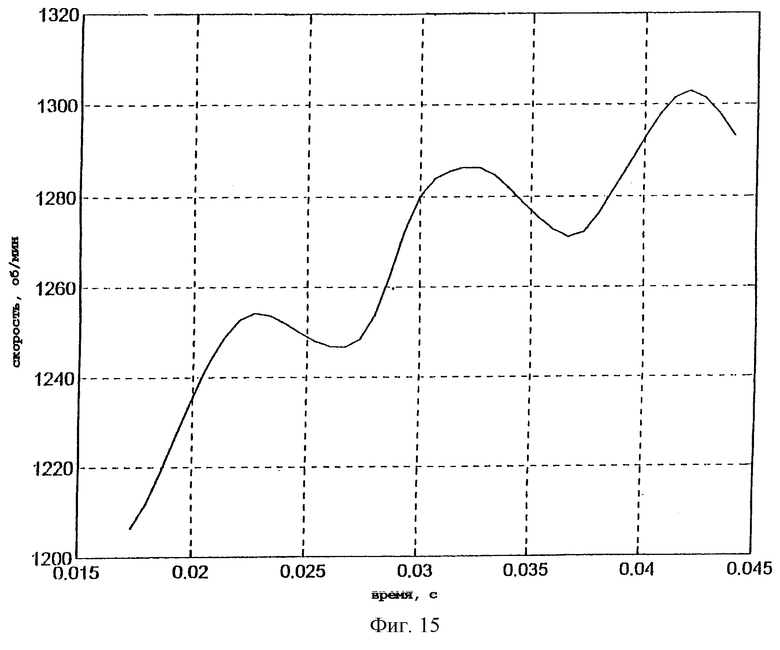
На фиг.15 показан результат увеличения масштаба характеристик двигателя "скорость-время", показанных на фиг.14, с центром на скорости 1.260 об/мин, демонстрирующий более четко периодический рост и падение скорости двигателя в стационарном режиме. Эта кривая служит критерием для определения категории функционирования нагруженного двигателя в стационарном режиме на скорости 1.260 об/мин.
На фиг.16 показан спектр скорости, полученный на основе характеристик "скорость-время", показанных на фиг.15 с центром на скорости 1.260 об/мин. Можно заметить, что спектр скорости показывает основную частоту 100 Гц, которая соответствует удвоенной частоте источника переменного тока.
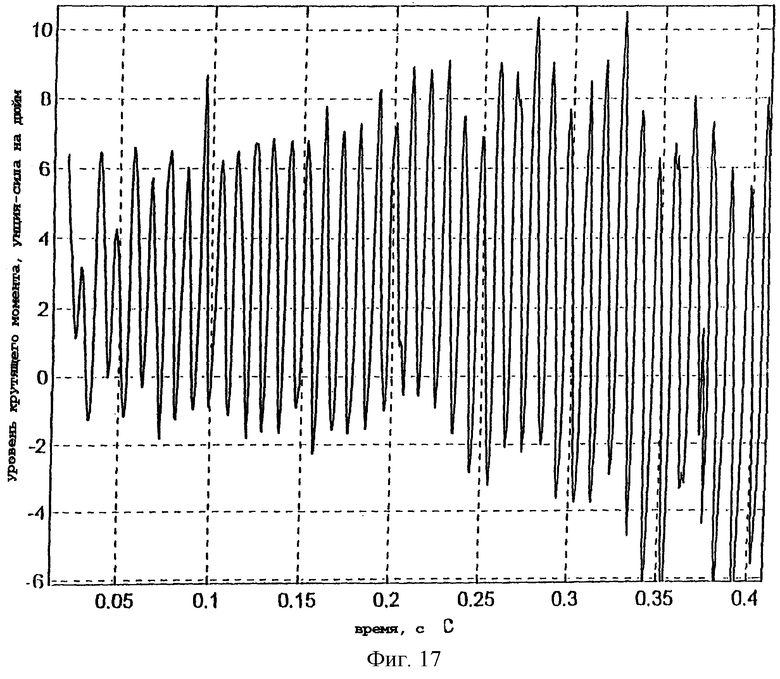
На фиг.17 показаны характеристики "крутящий момент - время", полученные путем дифференцирования характеристик "скорость-время", показанных на фиг.14, по времени и умножения на объединенный момент инерции маховика и двигателя. На фигуре показаны колебания в крутящем моменте, сходные наблюдаемым на кривой "скорость-время" фиг.14.
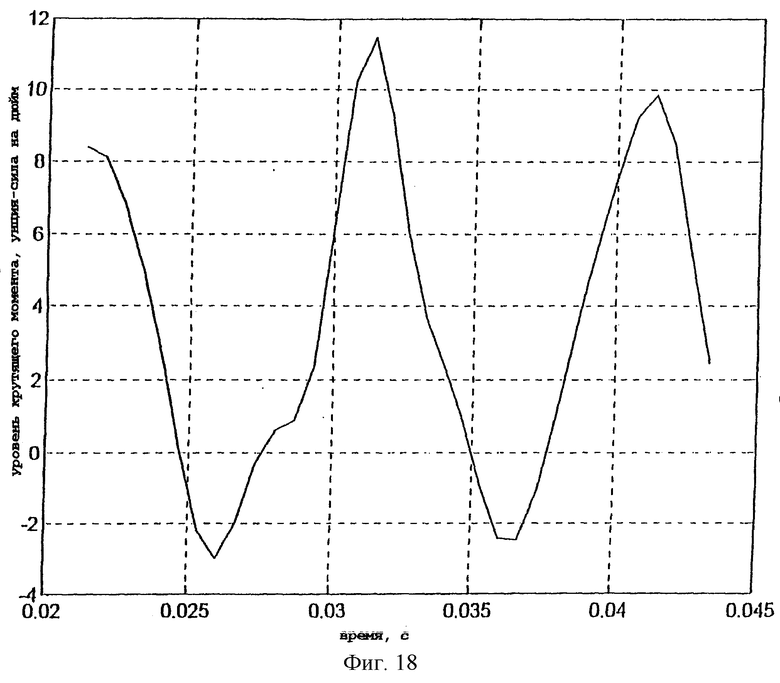
На фиг.18 показан результат увеличения масштаба характеристик двигателя "крутящий момент - скорость", показанных на фиг.17, с центром на скорости 1.260 об/мин, демонстрирующий более четко периодический рост и падение крутящего момента двигателя в стационарном режиме. Как видно из фиг.14, двигатель достигает скорости 1.260 об/мин в момент времени t=0,3 с. фиг.18, таким образом, получена путем увеличения масштаба характеристик двигателя "крутящий момент - время" с центром t=0,3 с. Эта кривая служит критерием для определения категории функционирования нагруженного двигателя в стационарном режиме на скорости 1.260 об/мин.
На фиг.19 показан спектр крутящего момента, полученный на основе характеристик "крутящий момент - время", показанных на фиг.18 с центром на скорости 1.260 об/мин. Снова можно заметить, что спектр крутящего момента показывает основную частоту 100 Гц, которая соответствует удвоенной частоте источника переменного тока.
На фиг.20 показана диаграмма частотного спектра скорости в стационарном режиме для кондиционера, отображающая проблему порывов ветра, которая проявляется как значительный компонент 3 Гц.
На фиг.21 показана диаграмма частотного спектра скорости в стационарном режиме для хорошего кондиционера, демонстрирующего небольшой компонент 3 Гц.
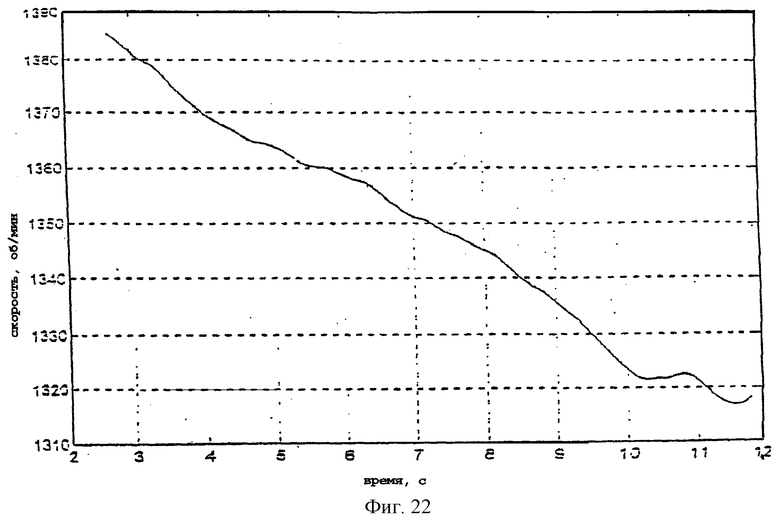
На фиг.22 показана равномерная характеристика "скорость-время" в стационарном режиме для кондиционера, созданная путем неоднократного регулирования заслонки и путем расчета и изображения характеристики вентилятора "скорость-время" для различных положений заслонки. Она демонстрирует, что флуктуации скорости вентилятора являются небольшими и указывают на высококачественное функционирование кондиционера.
На фиг.23 показана характеристика "скорость-время" для дефектного кондиционера, созданная путем неоднократного регулирования заслонки и путем расчета и изображения характеристики вентилятора "скорость-время" для различных положений заслонки. В этом случае показаны резкие флуктуации скорости вентилятора, указывающие на плохое функционирование кондиционера.
На фиг.24 представлена функциональная блок-схема анализатора 40 динамических крутящего момента и скорости для визуализации характеристик скорости или крутящего момента вращающегося вала, которые рассчитываются согласно данному изобретению. Анализатор 40 динамических крутящего момента и скорости содержит блок выборки 42 для выборки измеренных скорости или крутящего момента в некотором интервале времени и начиная с некоторого исходного момента выборки, которые оба выбираются пользователем. Для визуализации выбранных характеристик скорости и/или крутящего момента к блоку выборки 42 присоединено устройство отображения 43. Панель управления 44 позволяет управлять масштабом первой оси x по времени или частоте или масштабом второй, расположенной под прямым углом оси у по величине крутящего момента или скорости. В типовом случае ось x является горизонтальной, а ось у - вертикальной, хотя это вопрос удобства и, если требуется, оси могут меняться местами. Панель управления 44 позволяет пользователю регулировать интервал времени выборки блока выборки 42, обеспечивая, таким образом, большую гибкость, так как чем больше интервал времени выборки, тем больше получается выбранных значений.
Далее станет очевидно, что в предпочтительных вариантах осуществления данного изобретения могут быть произведены модификации, которые не будут выходить за пределы объема изобретения, определенного в формуле изобретения. Таким образом, хотя предпочтительные варианты осуществления описаны конкретно применительно к PSC асинхронному двигателю переменного тока, изобретение в равной степени хорошо подходит для использования с другими типами двигателей переменного и постоянного тока. Очевидно, что реальные характеристики "скорость-время" и "скорость - крутящий момент" для машин различных типов будут различаться, в то же время характеристики машин определенного типа являются хорошим показателем неприемлемого отклонения от технических требований к конструкции, предъявляемых изготовителем.
Подобным же образом, в предпочтительных вариантах осуществления изобретения измеряются периоды длительности непрерывно следующих друг за другом импульсов, генерируемых преобразователем углового положения вала. Однако, ввиду того что данное изобретение в типовом случае предлагает тысячекратное повышение в разрешении для динамических явлений в характеристиках скорости и крутящего момента по сравнению с традиционными способами, ясно, что значительное улучшение по-прежнему достигается, даже если измеряются, например, периоды только каждого второго или третьего импульса.
И, наконец, хотя данное изобретение описано с использованием конкретного примера тестирования функционирования вращающихся машин, необходимо понимать, что изобретение позволяет получить улучшенную разрешающую способность измерения угла поворота, невзирая на конкретное приложение, для которого осуществляется измерение.
В следующих далее пунктах формулы изобретения, относящихся к способу, буквенные символы для обозначения в пунктах этапов использованы только для удобства и не подразумевают какой бы то ни было конкретный порядок выполнения этапов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ МАШИН | 2013 |
|
RU2567017C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ВАЛОВ РОТОРНЫХ МАШИН, ПЕРЕДАЮЩИХ КРУТИЛЬНЫЕ НАГРУЗКИ | 2002 |
|
RU2239803C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| СПОСОБ ДИАГНОСТИКИ ПОРШНЕВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2082139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ СКВАЖИН ЗАБОЙНЫМ ГИДРОДВИГАТЕЛЕМ | 1994 |
|
RU2065956C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2293962C1 |
| СПОСОБ ДИНАМИЧЕСКОГО МОНИТОРИНГА ВЫСОКОМОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745382C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ МНОЖЕСТВЕННЫХ ПАРАМЕТРОВ ТУРБОМАШИННОЙ СИСТЕМЫ | 2009 |
|
RU2513646C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ И РЕГУЛИРОВКИ РАБОТЫ УСТРОЙСТВ С ПРИВОДОМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2400919C2 |














Изобретение относится к высокоточному измерению угла поворота и, в частности, к тестированию функционирования вращающихся машин для получения характеристики “скорость – время” или ее функции. Для измерения угла поворота вращающегося вала присоединяют к валу цифровой преобразователь углового положения, который генерирует непрерывно следующие друг за другом логические уровни ВЫСОКИЙ и НИЗКИЙ во время соответственных непрерывно следующих друг за другом интервалов времени. Вал вращается и соответственные периоды длительности каждого непрерывно следующего логического уровня, генерируемого цифровым преобразователем углового положения, накапливаются таким образом, чтобы сделать возможным расчет угла поворота вала или функции от угла поворота. Техническим результатом является повышение точности, несмотря на погрешности в рабочем цикле преобразователя. Благодаря такой неотъемлемой особенности данного изобретения, как высокая разрешающая способность измерения, может быть точно определено динамическое функционирование, а также функционирование в стационарном режиме, без необходимости снижения скорости вращения машин путем использования маховика. 4 с. и 31 з.п. ф-лы, 24 ил.

| US 5218860 А, 15.06.1993 | |||
| JP 59160766 А, 11.09.1984 | |||
| АВТОМАТИЧЕСКИЙ СПОСОБ ПОВЫШЕННОЙ ТОЧНОСТИ КОНТРОЛЯ КАЧЕСТВА ЭЛЕКТРОДВИГАТЕЛЯ | 1994 |
|
RU2085961C1 |
| US 4535288 А, 13.08.1985 | |||
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ БИОЛОГИЧЕСКОГО ОБЪЕКТА | 1998 |
|
RU2127549C1 |
| Устройство для перфорирования листового материала | 1973 |
|
SU457086A1 |
| Устройство для контроля статора электрической машины | 1984 |
|
SU1275336A1 |
| US 4169371 A, 02.10.1979 | |||
| US 5631411 A, 20.05.1997 | |||
| US 5616999 A, 01.04.1997. | |||

