Изобретение относится к техническому диагностированию роторных машин и предназначено для измерения крутящих моментов и их колебаний на вращающихся валах, преимущественно газотурбинных двигателей, буровых машин, прокатных станов и двигателей внутреннего сгорания, передающих моментные нагрузки, которые необходимы, например, для оценки предельно допустимых режимов работы, а также характеристик мало- и многоцикловой усталости материала.
В частности, изобретение может быть использовано для диагностирования технического состояния и регулирования процесса передачи нагрузок при бурении скважин, работе судовых двигательных установок, прокатке металла и для др. объектов.
Известно устройство для контроля крутильных колебаний (см. патент РФ №2044285, кл. G 01 Н 9/00 от 20.09.95, бюл. №26), содержащее закрепляемый на объекте корпус, выполненный в виде двух сообщающихся сосудов, размещенный в корпусе инерционный элемент, источник света, световод, установленный в корпусе и оптически связанный с инерционным элементом, в качестве которого используется ртуть, и источником света, измерительный блок с фотопреобразователем.
Данное устройство имеет недостатки, заключающиеся в том, что невозможно измерение крутильных колебаний с частотой более 1 Гц и, кроме того, в нем используется вредный материал - ртуть.
Известен способ определения крутящего момента, заключающийся в преобразовании деформаций кручения вала в электрический сигнал с помощью закрепленных на нем тензорезисторов, регистрации и сравнении электрических сигналов на рабочих и холостых режимах (см. патент РФ № 2017097, кл. G 01 L 1/22. Способ определения осевого усилия и крутящего момента. Опубл. 30.07.94 г., бюл. №14), позволяющий уточнить измерение осевых нагрузок, возникающих в валах.
Недостатком известного способа является низкая точность и недостоверность измерения крутильных силовых нагрузок и их колебаний вследствие угловых ошибок ориентации тензорезисторов при их закреплении на валах, наличия помех при передаче сигналов через токосъемные кольца и щетки, а также ограниченным частотным диапазоном передаваемых сигналов (см., например, [1] стр. 231). Хотя предлагаемый по пат. №2017097 способ и позволяет уточнить величину измеряемого осевого усилия путем введения экспериментально определяемой поправки, принципиально проблему повышения точности измерения крутящих моментов и их колебаний он не решает.
Известен торсиограф (см. патент РФ №2059208, кл. G 01 Н 1/10, опубл. 27.04.96 г., бюл. № 12) для измерения крутильных колебаний валопроводов энергетических установок, содержащий сейсмическую массу, корпус с упругой связью между ними, подшипники, блок регистрации взаимного углового положения сейсмической массы и корпуса, состоящий из рефлектора, поляроидов, статора, источника света, фотоприемника, блока питания и регистратора, что позволяет устранить влияние электромагнитных полей на канал передачи информации и повышает точность измерений крутильных колебаний.
Однако известный торсиограф сложен конструктивно и не может устанавливаться в произвольном месте вала, а закрепляется только на его торцевой части, что ограничивает условия его использования, а также в этом случае исключается возможность регистрации угловых колебаний, связанных с действием колебательных крутильных нагрузок (на свободном конце вала можно зарегистрировать только свободные собственные крутильные колебания вала).
Известно устройство (см. патент РФ № 2177145, кл. G 01 Н 1/08. Сигнализатор предаварийных деформаций лопаток турбомашин. Опубл. 20.12.2001 г., бюл. №35), предназначенное для измерения неоднородности лопаточного венца турбомашины, вызванной динамическими деформациями лопаток, что достигается посредством измерения текущих временных интервалов между лопатками в динамическом режиме и сравнения их со средним временным интервалом между лопатками на каждом обороте ротора турбомашины с использованием импульсного датчика, формирователя, сумматора кодов, делителей суммарного кода, блока вычисления разности, блока управления и схемы сравнения.
Известное устройство позволяет регистрировать крутильные колебания вала, однако не обеспечивает возможности измерения крутящих моментов и выделения крутильных колебаний, обусловленных действием этих моментов, что не позволяет использовать его при оценке вероятности усталостного разрушения вала, а также лопаточного аппарата турбины под действием переменных крутильных нагрузок.
Целью настоящего изобретения является повышение точности и достоверности диагностирования технического состояния машин роторного типа путем определения моментных нагрузок и их колебаний на вращающихся валах.
Для достижения этой цели на валу привода машины устанавливают два импульсных датчика углового положения вала, фиксирующих его крутильные колебания. В процессе вращения ненагруженного вала производят синхронизацию сигналов от этих датчиков по фазе измеряемых крутильных колебаний. При работе нагруженного вала фиксируют сдвиги импульсов сигналов крутильных колебаний в двух сечениях вала, расположенных на расстоянии друг от друга, и по разности значений этих сдвигов определяют угловые деформации, вызванные колебаниями крутящего момента в линии привода машины.
Определение величины крутящего момента в зависимости от величины угловых деформаций производят с использованием коэффициентов, получаемых экспериментальной калибровкой или по общеизвестным формулам теории упругости (см., например, [2] стр. 160), согласно которым величина крутящего момента прямо пропорциональна угловой деформации скручивания вала, которая, в свою очередь, прямо пропорциональна измеряемому по предлагаемому способу отношению мгновенных значений интервала времени между импульсами электрических сигналов от двух датчиков углового положения вала к интервалу времени между смежными импульсами от одного из этих датчиков.
Для уточнения измерений моментных нагрузок холостого хода вначале измеряют сдвиг импульсов, регистрируемый двумя датчиками при вращении вала в одном и другом направлениях, после чего к величине измеряемого сдвига импульсов, при работе вала под нагрузкой, прибавляют половину измеренного ранее сдвига.
С целью выявления и локализации источника возбуждения энергии крутильных колебаний вала для каждой из выраженных частотных компонент спектра колебаний измеренного крутящего момента в соответствии с критерием Умова-Пойнтинга (см., например, [3] стр. 63) дополнительно определяют знак косинуса угла, равного фазовому сдвигу между выделенными соответствующими частотными компонентами в двух временных последовательностях - текущих значениях временного интервала между импульсами от одного и другого датчиков углового положения вала и обратной величине текущих значений временного интервала между смежными импульсами любого из датчиков. Знак косинуса указанного угла позволяет установить направление волны колебательных импульсов и тем самым выявить локализацию их источника по длине вала.
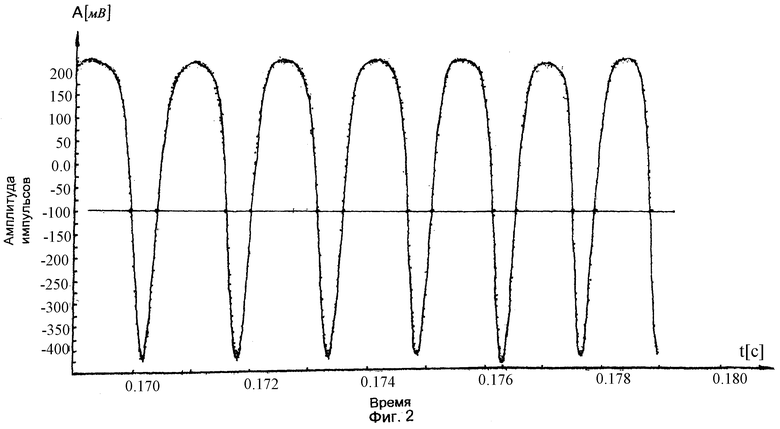
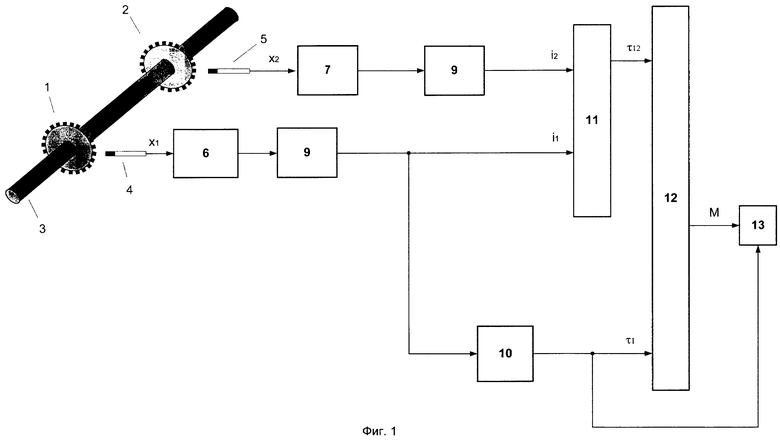
На фиг.1 приведена блок-схема устройства, реализующего предлагаемый способ; на фиг.2 - осциллограмма импульсов электрического сигнала от токовихревого датчика углового положения вала; на фиг.3 - типичные осциллограммы и спектрограммы.
Устройство (фиг.1) состоит из одинаковых зубчатых колец-индукторов 1-2, жестко закрепляемых по периметру вала 3, датчиков (сенсоров), например токовихревых 4-5, закрепляемых на неподвижном основании вблизи зубчатых колец 1-2, усилителей 6, 7 сигналов от датчиков 4, 5 блоков 8, 9 формирования стандартных импульсов по усиленным сигналам, введенных с целью устранения мешающих факторов в импульсных сигналах кроме информативных временных сдвигов, блока 10 оценки значений временных интервалов τ1 между смежными импульсами от датчика 4 углового положения вала в формах зависимости от текущего времени и текущего фазового положения вала, блока 11 оценки значений временных интервалов τ12 между импульсами от датчика 4 и датчика 5 углового положения вала в формах зависимости от текущего времени и текущего фазового положения вала, блока 12 оценки рабочего крутящего момента и его колебаний, вычислителя 13 характеристик (например, спектров) колебательной составляющей крутящего момента.
Устройство, реализующее предлагаемый способ, работает следующим образом. При вращении ненагруженного вала 3 механически путем регулирования установки зубчатых колец 1, 2 на валу 3, либо электрически введением временного запаздывания в блоке формирования стандартных импульсов 9, либо совместно механически и электрически производят фазирование импульсов таким образом, чтобы временные интервалы τ12 между импульсами от датчиков 4 и 5 углового положения вала 3 были равны 0 (τ12=0). Далее при вращении нагруженного вала 3 и связанных с ним зубчатых колец 1 и 2 в вихретоковых датчиках 4 и 5 наводятся электрические импульсы i1 и i2, мгновенная частота следования которых пропорциональна мгновенной частоте вращения вала 3. Далее импульсы поступают в блок 10 оценки текущих значений временных интервалов τ1 между смежными импульсами i1 от датчика 4 и блок 11 оценки текущих значений временных интервалов τ12 между импульсами от датчиков 4 и 5. В блоке 12 по текущим значениям временных интервалов τ1 и τ12 производится оценка рабочего крутящего момента и его колебаний по формуле
М=Сτ12/τ1,
где С - постоянный коэффициент, определяемый путем экспериментальной калибровки или расчетным путем по формуле
С=2πG/ZL,
где G - модуль упругости при кручении вала;
Z - число генерируемых импульсов за один оборот вала,
L - расстояние между зубчатыми кольцами 4 и 5 на валу.
На фиг.2 представлены осциллограммы усиленного импульсного электрического сигнала от токовихревого датчика углового положения ротора турбонасосного агрегата одной из конструкций маршевого жидкостного ракетного двигателя на начальном участке режима запуска (быстро увеличивающиеся обороты ротора от 140,6 об/мин до 178,5 об/мин за 17,8 мкс). Количество импульсов за один оборот ротора - 128.
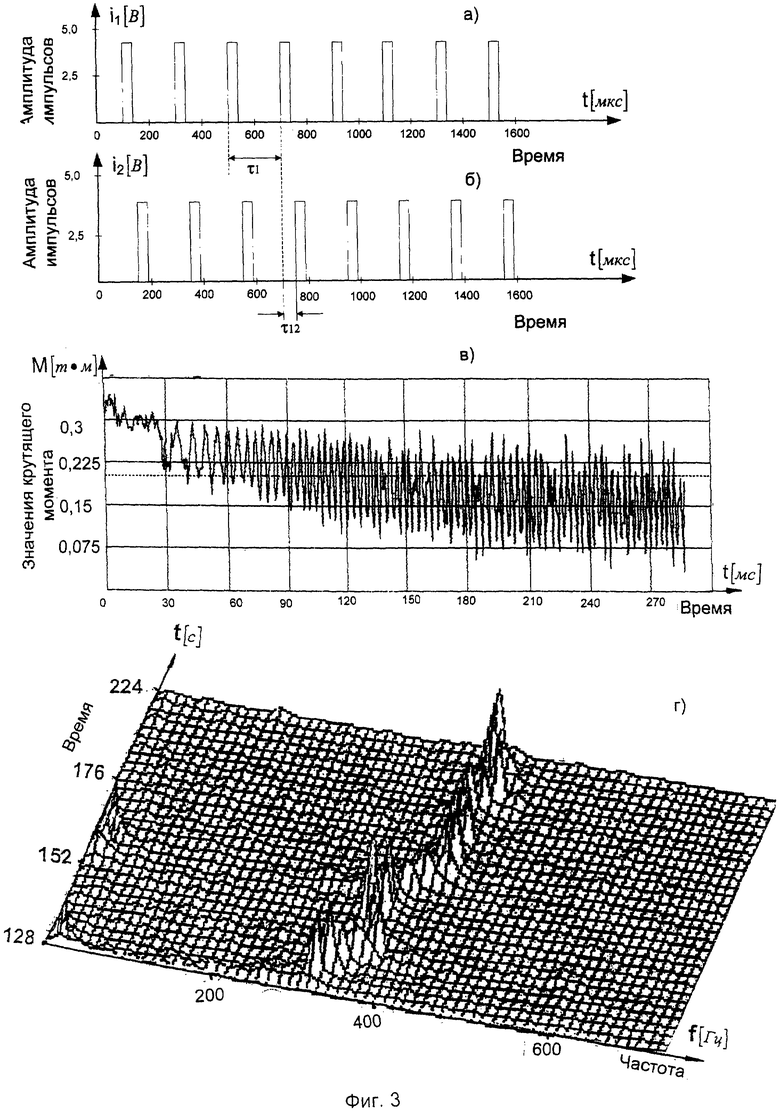
На фиг.3а и 3б представлены фрагменты осциллограмм стандартизованных импульсов i1 и i2 на выходе блоков 8, 9 на установившемся режиме работы двигателя при числе оборотов ротора 2200 об/мин. Число импульсов за один оборот ротора у обоих датчиков Z=128, расстояние между датчиками, установленными в двух сечениях ротора, L=0,5 м, диаметр ротора 0,15 м, материал ротора - сталь. Средние значения временных интервалов между смежными импульсами в сигнале i1 и импульсами в сигналах i1 и i2 на приведенных фрагментах на фиг.3 составляют τ1 =213,0 мкс, τ12=40,0 мкс. При этом среднее значение угла закрутки ротора на мерном участке составило
ϕ=360·τ12/Zτ1=9,21·10-3 рад.
Значение рабочего крутящего момента при известном угле закручивания ротора ϕ на мерном участке длиной L определяется формулой
M=GJϕ/L,
где G - модуль упругости материала ротора при сдвиге (G=81·103 мПа);
J - полярный момент инерции сечения ротора (J=πr/29=0,194·10-6 м4);
r - радиус вала ротора (r=0,075 м).
Подставляя значения указанных величин в формулу для определения крутящего момента, который вычисляется в блоке 12 (фиг.1), получим
М=0,142 тм.
Что касается колебательной компоненты крутящего момента, то она определяется по аналогичной схеме в блоке 12 по флуктуационной составляющей временного интервала τ12, определяемой с точностью не менее 10 нс (наносекунд).
На фиг.3в приведен график полного крутящего момента (постоянная и колебательная составляющие) в частотном диапазоне до 1000 Гц, а на фиг.3г - спектрограмма колебательной составляющей крутящего момента, определяемая в блоке 13. Такая спектрограмма является информативной с точки зрения диагностирования технического состояния кинематической пары ротор-статор двигателя, в частности приведенные фрагменты соответствуют моменту развития мощных крутильных автоколебаний, обусловленных замыканием паразитной положительной обратной связи по контуру двигателя: крутильные тангенциальные колебания лопаточного аппарата турбины - крутильные колебания ротора - колебательный расход окислителя через турбокомпрессор в газогенератор - крутильные колебания лопаточного аппарата турбины.
При вращении вала без нагрузки на него действует статический момент холостого хода, вызывающий сдвиг импульсов от одного и другого датчиков, который измеряется при реверсировании вала на холостом ходу и учитывается при определении полного действующего крутящего момента при работе под нагрузкой.
При вращении вала под нагрузкой происходят крутильные деформации сдвига, вызываемые действием крутящего момента и его колебаний. В результате возбуждаемые датчиками импульсы сдвигаются по времени относительно друг друга.
При этом параметры измеряемых временных сдвигов этих импульсов позволяют фиксировать мгновенные значения угловых деформаций с точностью до долей угловых минут и выше. Кроме этого, исключаются погрешности измерений, связанные с неточностями закрепления датчиков и нарушениями условий коммутации в линиях измерения электрических сигналов.
Таким образом, измерение импульсов крутильных колебаний в двух сечениях вала и сравнение их временных сдвигов позволяет повысить точность определения величины крутящих моментов и их колебаний и, тем самым, повысить точность оценки усталостной прочности и диагностирования технического состояния машины, что и являлось целью настоящего изобретения.
Источники информации
1. Вибрации в технике. Т. 5. М.: Машиностроение, 1981, с.231.
2. Одинец С.С., Топилин Г.Е. Средства измерения крутящего момента. М.: Машиностроение, 1977, с.160.
3. Гуло Д.Д., Умов Н.А. М.: Просвещение, 1977, с.63.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ МАШИН | 2013 |
|
RU2567017C2 |
| СПОСОБ И МОНИТОРИНГОВАЯ СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ И АВАРИЙНОЙ ЗАЩИТЫ ЛОПАТОЧНЫХ АППАРАТОВ РОТОРНЫХ ДВИГАТЕЛЕЙ | 2002 |
|
RU2241216C2 |
| Способ и устройство измерения крутящего момента приёмного вала горячештамповочного пресса для измерения его усилия | 2023 |
|
RU2820805C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЦИКЛИЧЕСКИХ МАШИН - МЕТАЛЛОРЕЖУЩИХ СТАНКОВ ФАЗОХРОНОМЕТРИЧЕСКИМ МЕТОДОМ | 2013 |
|
RU2561236C2 |
| УСТРОЙСТВО И СПОСОБ МОНИТОРИНГА КРУТИЛЬНЫХ КОЛЕБАНИЙ ВРАЩАЮЩЕГОСЯ ВАЛА (ВАРИАНТЫ) | 2021 |
|
RU2782741C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК КРУТИЛЬНЫХ КОЛЕБАНИЙ ВРАЩАЮЩЕГОСЯ ВАЛА | 2013 |
|
RU2523044C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ДЕФЕКТОВ (ВОЗМУЩЕНИЙ) В ГАЗОВЫХ ЦЕНТРИФУГАХ ИЗОТОПНО-РАЗДЕЛИТЕЛЬНОГО КАСКАДА И СИСТЕМА ДИАГНОСТИКИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2236308C2 |
| Способ измерения усилия кривошипного горячештамповочного пресса по крутящему моменту приемного вала | 2024 |
|
RU2837056C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| СПОСОБ КОМПЕНСАЦИИ КРУТИЛЬНЫХ КОЛЕБАНИЙ РОТОРА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2314548C2 |
Изобретение относится к измерительной технике, в частности к области диагностирования технического состояния роторных машин. Для осуществления диагностирования на валу устанавливаются два импульсных датчика углового положения вала, фиксирующих его крутильные колебания. В процессе вращения ненагруженного вала производят синхронизацию сигналов от этих датчиков по фазе измеряемых крутильных колебаний. При работе нагруженного вала фиксируют сдвиги импульсов сигналов крутильных колебаний в двух сечениях вала, расположенных на расстоянии друг от друга, и по разности значений этих сдвигов определяют угловые деформации, вызванные колебаниями крутящего момента в линии привода машины. Для уточнения измерений моментных нагрузок холостого хода вначале измеряют сдвиг импульсов, регистрируемый двумя датчиками при вращении вала в одном и другом направлениях. После этого к величине измеряемого сдвига импульсов, при работе вала под нагрузкой, прибавляют половину измеренного ранее сдвига. Технический результат заключается в повышении точности и достоверности определения моментных нагрузок на вращающихся валах. 4 з.п. ф-лы, 3 ил.
C=2·7π·G/Z·L,
где G - модуль упругости при кручении;
Z - число импульсов, генерируемых за один оборот вала;
L - расстояние между зубчатыми кольцами на валу.
| СИГНАЛИЗАТОР ПРЕДАВАРИЙНЫХ ДЕФОРМАЦИЙ ЛОПАТОК ТУРБОМАШИН | 2000 |
|
RU2177145C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КРУТИЛЬНЫХ КОЛЕБАНИЙ | 1992 |
|
RU2044285C1 |
| US 5438882 А, 08.08.1995 | |||
| JP 52142568 А, 28.11.1977 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОГО УСИЛИЯ И КРУТЯЩЕГО МОМЕНТА | 1991 |
|
RU2017097C1 |

