Изобретение относится к способам управления индукторными двигателями, в том числе тяговыми, имеющими зубчатый статор и ротор.
Известен способ управления индукторным двигателем, заключающийся в том, что формируют фазные токи, для чего измеряют периоды датчика положения ротора, подают импульсы напряжения в интервале от 0 до 180 эл.град., отслеживая заданное значение фазного тока, например, способом "токовый коридор" (см. журнал "Электротехника" №6/98 на с.25-26, рис.2в и 4б).
При таком способе регулирования в интервалах от нуля эл.град. до 180/m эл.град. и от (180-180/m) эл.град. до 180 эл.град. (m - число фаз двигателя) под током находятся две фазы индукторного двигателя одновременно. Мгновенный электромагнитный момент индукторного двигателя определяется суммой электромагнитных моментов отдельных фаз, находящихся под током одновременно. Момент входящий в работу фазы, складываясь с моментом выходящей из работы фазы, вызывают пульсации суммарного момента (см. журнал "Электричество" №10/2001 на с.34, рис.1б).
Наиболее близким по технической сущности является способ управления индукторным двигателем, заключающийся в том, что формируют токи в фазах двигателя, для чего измеряют периоды датчика положения ротора двигателя и внутри этого периода подают импульсы питающего двигатель напряжения в интервале от 0 до 180 эл.град. на фазные обмотки двигателя (см. Электровозостроение: сб. науч. тр. ОАО "Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения" (ОАО "ВЭлНИИ") - 2000. Т.42 - 324 с. на с.187 рис. и журнал "Электротехника" №6/98 на с.25-26, рис.2в и 4б).
Прямоугольные формы токов и в этом способе управления приводят к большим пульсациям суммарного момента.
Высокая частота и амплитуда пульсации результирующего момента могут стать главной причиной усталостных разрушений элементов тяговой передачи (см. книгу Бирюкова И.В., Беляева А.И., Рыбникова Е.К. Тяговые передачи электроподвижного состава железных дорог. - М.: Транспорт. 1986. - 256 с., на с.119).
Кроме того, пульсации момента приводят к вибрациям, шуму, а также могут препятствовать нормальному пуску тягового электропривода.
Задачей изобретения является снижение пульсаций момента за счет формирования фазных токов входящей в работу фазу (0°÷60° - фаза "А", 120°÷180° - фаза "В"), находящуюся в работе фазе (60°÷120° - фаза "А") и выходящую из работы фазы (0°÷60° - фаза "С", 120°÷180° - фаза "А"), таким образом, чтобы сумма моментов, развиваемых этими фазами была постоянной и равна моменту индукторного двигателя, задаваемого директивно или регулятором скорости.
Поставленная задача решается способом управления индукторным двигателем за счет формирования фазных токов путем подачи импульсов напряжения в течение каждого периода датчика положения ротора (ДПР) двигателя, отличающийся тем, что период сигнала ДПР измеряют и интервал от нуля до 180 эл.град. (двигательный режим) разбивают на m равных интервалов
θ0 - начальный угол поворота ротора, соответствующий нулю эл.град.
θm - угол поворота ротора в конце интервала, соответствующий 180 эл.град.
В начале интервала подают на входящую в работу фазу напряжение питания таким образом, чтобы ток этой фазы не превышал значения IЗвх=const, измеряют в конце каждого интервала Δθ ток этой фазы и вычисляют создаваемый момент.
Создаваемый входящей в работу фазой двигателя момент определяют по формуле
где  θn - значение тока входящей в работу фазы и угла поворота ротора двигателя в конце текущего интервала;
θn - значение тока входящей в работу фазы и угла поворота ротора двигателя в конце текущего интервала;
ψ - потокосцепление фазы.
Тогда заданный момент выходящей из работы фазы определяют по формуле

где МЗ - заданное значение электромагнитного момента двигателя на следующем интервале.
Заданное значение тока этой фазы определяют по формуле
где  θn - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце текущего интервала;
θn - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце текущего интервала;
 θn+1 - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце следующего интервала.
θn+1 - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце следующего интервала.
В начале каждого из m интервалов подают напряжение питания на выходящую из работы фазу двигателя и снимают при достижении током этой фазы заданного значения, причем при достижении или превышении  или
или  значения МЗ, напряжение питания на выходящую из работы фазу двигателя не подается, на входящую в работу фазу подают питающее напряжение и снимают при достижении током этой фазы значения IЗ вх=const, а на работающую фазу двигателя в начале текущего интервала подают питающее напряжение и снимают при достижении током этой фазы значения
значения МЗ, напряжение питания на выходящую из работы фазу двигателя не подается, на входящую в работу фазу подают питающее напряжение и снимают при достижении током этой фазы значения IЗ вх=const, а на работающую фазу двигателя в начале текущего интервала подают питающее напряжение и снимают при достижении током этой фазы значения
где  и θn - значение тока работающей фазы двигателя и угла поворота ротора двигателя в конце текущего интервала.
и θn - значение тока работающей фазы двигателя и угла поворота ротора двигателя в конце текущего интервала.
Создаваемый работающей фазой момент определяется по формуле

Предлагаемый способ управления индукторным двигателем путем формирования согласованного изменения токов во входящей, работающей и выходящей фазах двигателя на интервалах коммутации от нуля до 180 эл.град. позволяет снизить пульсации электромагнитного момента на валу двигателя.
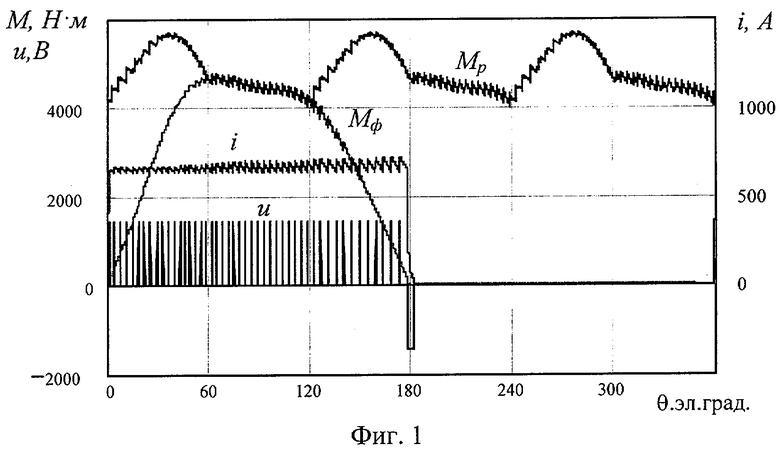
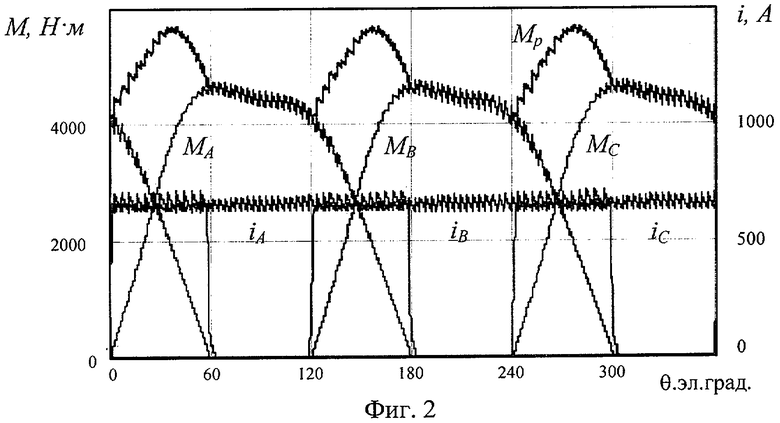
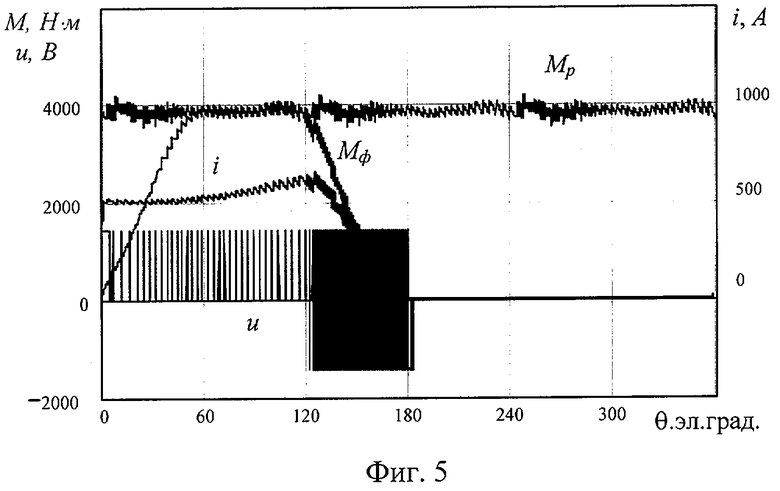
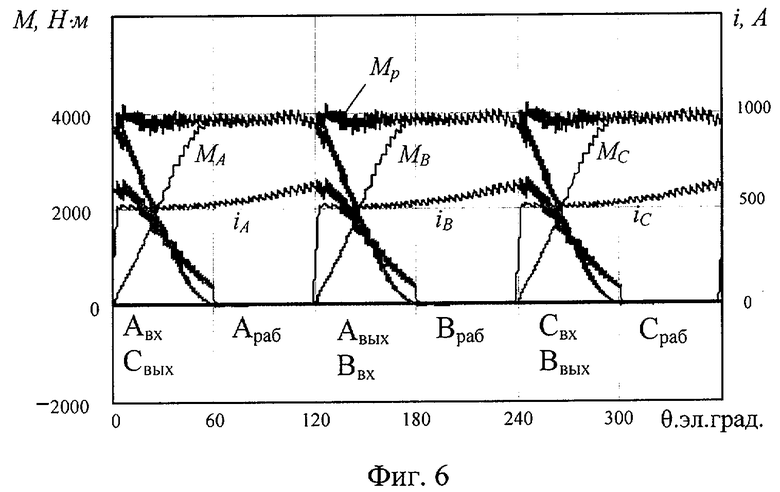
На фиг.1 показаны осциллограммы фазных значений тока, напряжения, электромагнитного момента и результирующего электромагнитного момента индукторного двигателя, а на фиг.2 показаны осциллограммы моментов и токов двигателя НТИ-350 при способе управления близким по технической сущности, рассчитанные на математической модели; на фиг.3 изображено устройство для реализации предлагаемого способа; на фиг.4 - алгоритм функционирования устройства; на фиг.5 показаны осциллограммы фазных значений тока, напряжения, электромагнитного момента и результирующего электромагнитного момента индукторного двигателя, а на фиг.6 показаны осциллограммы моментов и токов двигателя при реализации предлагаемого способа.
Способ осуществляют микропроцессорной системой, состоящей из блока таймеров 1, процессора 2, оперативного запоминающего устройства (ОЗУ) 3, постоянного запоминающего устройства (ПЗУ) 4, аналого-цифрового преобразователя (АЦП) 5, блока драйверов 6, транзисторного блока 7, управляющего индукторным двигателем 8, имеющего датчики положения ротора (ДПР) 9. Входы-выходы процессора 2, ОЗУ 3, ПЗУ 4, входы блока таймеров 1, блока драйверов 6 и выход АЦП 5 объединены шиной адресов-данных 10. Выход блока таймеров 1 и ДПР 9 соединены с шинами прерывания процессора 2. Токи двигателя 8 i поступают на вход АЦП 5. Выходы транзисторного блока 7, запитанного постоянным напряжением U, нагружены на обмотки индукторного двигателя 8.
Процессор, ОЗУ, ПЗУ, блок таймеров, АЦП могут быть, интегрированы в специализированный контроллер, например M167-1С (см. каталог продукции "Бортовая промышленная электроника" АО "Каскод", 105037 Москва, Измайловская пл., 7).
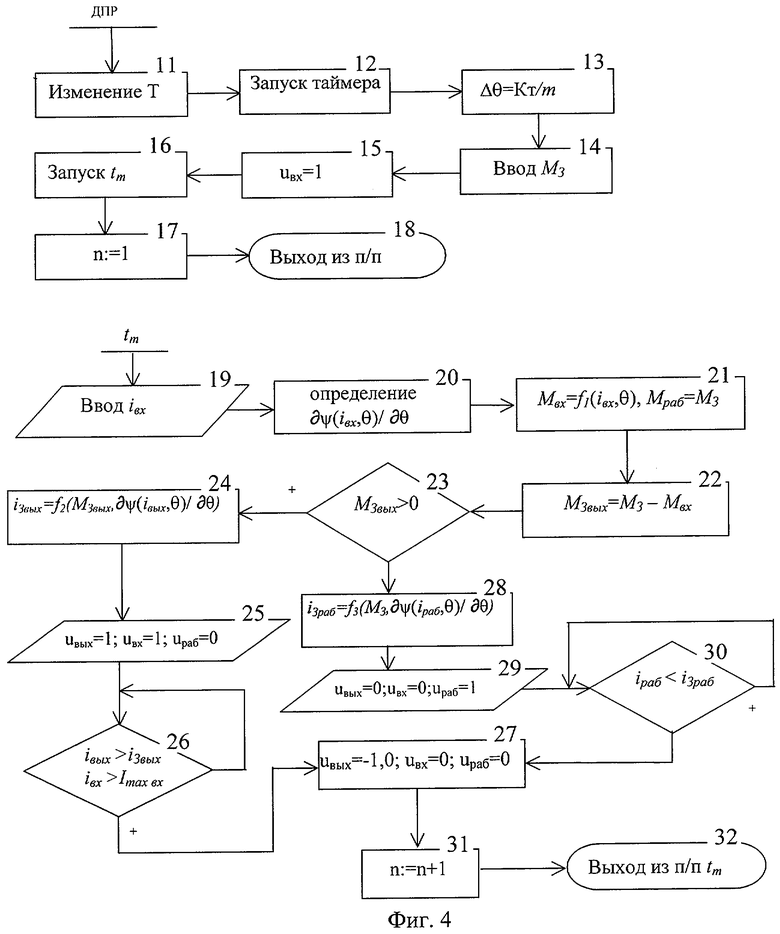
Способ реализуют алгоритмом, приведенным на фиг.4.
Алгоритм состоит из двух подпрограмм, которые запускают сигналами прерываний от ДПР 9 и блока таймеров 1-tm.
Первая подпрограмма ДПР (фиг.4) начинается по переднему фронту сигнала от ДПР 9. Считывают значения кода Кт из таймера Т (блок 11), соответствующее периоду сигнала ДПР и снова запускают таймер Т (блок 12). В блоке 13 определяют величину дискреты повторения вычислений значений токов и моментов Δθ делением содержимого таймера Кт на количество интервалов m-Δθ=Кт/m, после чего вводят заданное значение момента, например через АЦП 5 (блок 14), и транзисторный блок ТБ (блок 7) подает напряжение на входящую в работу фазу (блок 15).
В блоке 16 запускают таймер "m" интервала повторения вычислений, и номеру текущего интервала присваивается значение единицы (блок 17), после чего осуществляют выход из подпрограммы ДПР (блок 18).
Таймер "m" периодически выдает сигналы прерываний tm, по которым выполняется вторая подпрограмма, в которой определяют необходимые значения токов и моментов входящей и выходящей из работы фаз двигателя. Для этого вводится ток, входящий в работу фазы iвх n (блок 19), определяют значение  этой фазы (блок 20), определяют значение момента входящей в работу фазы по выражению (1) (блок 21)
этой фазы (блок 20), определяют значение момента входящей в работу фазы по выражению (1) (блок 21)
где θn - значение тока входящей в работу фазы и угла поворота ротора двигателя в конце текущего интервала;
ψ - потокосцепление фазы,
или работающей фазы по выражению (5) (блок 21)

В блоке 22 определяют заданное значение момента выходящей из работы фазы, как разность между заданным моментом и моментом, развиваемым входящей в работу фазы двигателя

где МЗ - заданное значение электромагнитного момента двигателя на следующем интервале.
Если момент выходящей из работы фазы меньше или равен нулю (блок 23), то транзисторный блок ТБ (блок 7) снимает напряжение с выходящей из работы фазы и подает на работающую (блок 29), определяют заданное значение тока работающей фазы по формуле (4) (блок 28)
где  и θn - значение тока работающей фазы двигателя и угла поворота ротора двигателя в конце текущего интервала,
и θn - значение тока работающей фазы двигателя и угла поворота ротора двигателя в конце текущего интервала,
иначе определяют по формуле (3) заданное значение тока выходящей из работы фазы (блок 24)
где θn - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце текущего интервала;
θn+1 - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце следующего интервала.
После чего осуществляют подачу напряжения на входящую и выходящую из работы фазы (блок 25).
В блоках 26 и 30 проверяется достижение заданных значений токами выходящей, входящей и работающей фазами соответственно и, в случае достижения, ТБ (блок 7) снимает напряжение с входящей или работающей фазы и подает отрицательное напряжение на выходящую фазу (блок 27). В блоке 31 значение "n" увеличивается на единицу, и осуществляется выход из подпрограммы (блок 32).
В начале каждого из m интервалов подают напряжение питания на выходящую из работы фазу двигателя и снимают при достижении током этой фазы заданного значения, причем при достижении или превышении  или значения МЗ напряжение питания на выходящую из работы фазу двигателя не подают, а на входящую в работу фазу двигателя в начале текущего интервала подают питающее напряжение и снимают при достижении током фазы значения Imax вх=const.
или значения МЗ напряжение питания на выходящую из работы фазу двигателя не подают, а на входящую в работу фазу двигателя в начале текущего интервала подают питающее напряжение и снимают при достижении током фазы значения Imax вх=const.
Величина "m" (количество интервалов повторения вычислений) ограничена сверху быстродействием процессора.
Быстродействие современных микропроцессорных контроллеров позволяет реализовать значения m>200 при максимальной скорости вращения ротора, что обеспечивает необходимую точность регулирования тока индукторного двигателя.
Пульсации момента тягового трехфазного реактивного индукторного двигателя снижены при реализации заявляемого способа управления с 15% до 1% за счет формирования фазных токов входящей и выходящей в работу фаз таким образом, чтобы сумма моментов развиваемых этими фазами была постоянной и равна моменту индукторного двигателя, задаваемого директивно или регулятором скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2251788C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОМЕНТА ТЯГОВОГО ИНДУКТОРНОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2315419C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2314634C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2297091C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2276451C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2004 |
|
RU2282300C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2260243C1 |
Изобретение относится к области электротехники и может быть использовано в электроприводе с индукторным двигателем, электроподвижном составе постоянного и переменного тока. Техническим результатом является снижение пульсаций момента. Способ управления индукторным двигателем состоит в том, что в начале каждого из m интервалов, на который разбивают интервал от 0° до 180°, подают напряжение питания на выходящую из работы фазу двигателя и снимают его при достижении током этой фазы заданного значения. При достижении или превышении моментом, создаваемым этой фазой, или моментом, создаваемым работающей фазой, заданного значения, напряжение питания на выходящую из работы фазу двигателя не подают, а на входящую в работу фазу подают питающее напряжение и снимают его при достижении током этой фазы заданного постоянного значения. На работающую фазу двигателя в начале текущего интервала подают питающее напряжение и снимают его при достижении током этой фазы заданного значения. Вычисление электромагнитного момента, создаваемого фазой, входящей в работу, электромагнитного момента, создаваемого фазой, выходящей из работы, заданного значения тока этой фазы и электромагнитного момента, создаваемого работающей фазой, производят по формулам, указанным в материалах заявки. Пульсации момента тягового трехфазного реактивного индукторного двигателя снижены с 15% до 1%. 6 ил.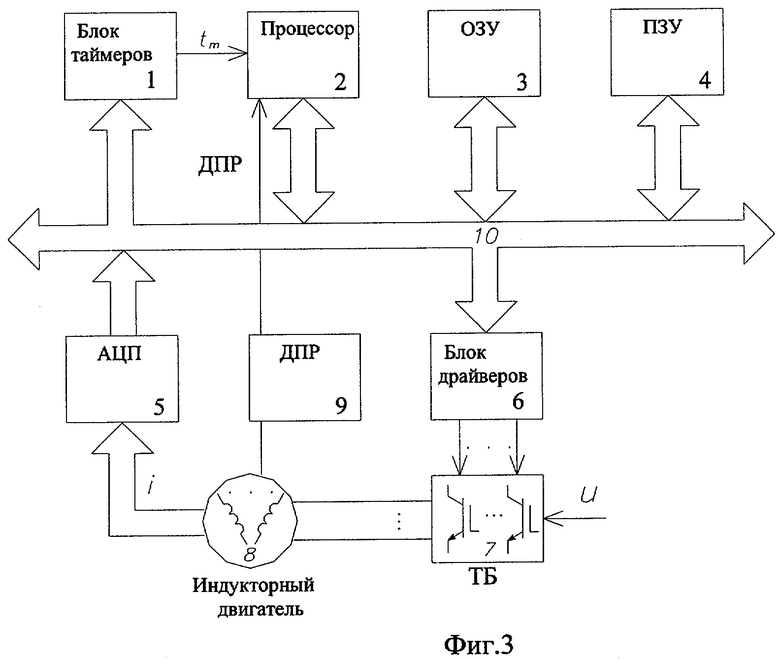
Способ управления индукторным двигателем, заключающийся в том, что формируют токи в фазах двигателя, для чего измеряют периоды сигнала датчика положения ротора двигателя, внутри этого периода подают импульсы питающего двигатель напряжения на фазные обмотки двигателя, отличающийся тем, что интервал от 0 до 180 эл.град. разбивают на m равных (например 1 эл.град.) интервалов
где θ0 - начальный угол поворота ротора, соответствующий 0 эл.град.;
θm - угол поворота ротора в конце интервала, соответствующий 180 эл.град.,
в начале интервала подают на входящую в работу фазу напряжение питания таким образом, чтобы ток этой фазы не превышал значения IЗвх=const, измеряют в конце каждого интервала Δθ ток этой фазы и вычисляют создаваемый электромагнитный момент этой фазы по формуле
где  θn - значение тока входящей в работу фазы и угла поворота ротора двигателя в конце текущего интервала;
θn - значение тока входящей в работу фазы и угла поворота ротора двигателя в конце текущего интервала;
ψ - потокосцепление фазы,
определяют заданный электромагнитный момент выходящей из работы фазы двигателя по формуле

где МЗ - заданное значение электромагнитного момента двигателя на следующем интервале,
определяют заданное значение тока этой фазы по формуле
где  θn - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце текущего интервала;
θn - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце текущего интервала;
 θn+1 - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце следующего интервала,
θn+1 - значение тока выходящей из работы фазы и угла поворота ротора двигателя в конце следующего интервала,
в начале каждого из m интервалов подают напряжение питания на выходящую из работы фазу двигателя и снимают при достижении током этой фазы заданного значения, причем при достижении или превышении  или
или  значения МЗ, напряжение питания на выходящую из работы фазу двигателя не подается, на входящую в работу фазу подают питающее напряжение и снимают при достижении током этой фазы значения IЗвх=const, а на работающую фазу двигателя подают в начале текущего интервала питающее напряжение и снимают при достижении током этой фазы значения
значения МЗ, напряжение питания на выходящую из работы фазу двигателя не подается, на входящую в работу фазу подают питающее напряжение и снимают при достижении током этой фазы значения IЗвх=const, а на работающую фазу двигателя подают в начале текущего интервала питающее напряжение и снимают при достижении током этой фазы значения
где  и θn - значение тока работающей фазы двигателя и угла поворота ротора двигателя в конце текущего интервала,
и θn - значение тока работающей фазы двигателя и угла поворота ротора двигателя в конце текущего интервала,
определяют создаваемый работающей фазой момент по формуле

| Сборник научных трудов ОАО «Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения (ОАО «ВЭлНИИ»), 2000, т.2, с.187 | |||
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| СПОСОБ СНИЖЕНИЯ ШУМА РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 1999 |
|
RU2166228C2 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТОКА В ФАЗНЫХ ОБМОТКАХ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2229768C2 |
| Видоизменение устройства для освещения и окрашивания мениска в водомерных стеклах паровых котлов и баков | 1928 |
|
SU17245A1 |
| Вентильный электропривод | 1987 |
|
SU1522371A1 |
| Устройство для управления бесконтактным двигателем постоянного тока | 1988 |
|
SU1713038A1 |
| GB | |||

