Изобретение относится к способам наведения управляемого объекта (УО) на наземную цель и может быть использовано при создании новых и модернизации существующих систем наведения управляемых объектов класса "воздух - поверхность".
Известен способ активного самонаведения УО на цель [1], который состоит в том, что облучают цель излучением генератора, установленного на УО, принимают на УО отраженное от цели излучение, измеряют угол между направлением, с которого приходит принятое излучение, и продольной осью УО, задают требуемое значение этого угла, вычисляют разность между требуемым и измеренным значениями этого угла, пропорционально которой вычисляют управляющий сигнал для изменения направления движения УО. Недостаток этого способа наведения заключается в большой массе генератора излучения и источников его питания, устанавливаемых на УО, а также в невозможности наведения УО на цели, отраженное от которых излучение нельзя отличить от излучения, отраженного объектами окружающей цель среды.
Известен также способ пассивного самонаведения УО на цель [2], который состоит в том, что на УО принимают излучение от внешнего источника излучения, размещенного на цели, измеряют угол между направлением, с которого приходит на УО принятое излучение, продольной осью УО задают требуемое значение этого угла и вычисляют на УО разность между требуемым и измеренным значением этого угла, пропорционально которой вычисляют управляющий сигнал для изменения направления движения УО в сторону уменьшения этой разности. Недостаток этого способа заключается в том, что он не позволяет наводить УО на цели, на которых невозможно разместить внешний источник излучения.
Прототипом изобретения следует считать способ пассивного самонаведения УО на цель [2], общими признаками которого с заявляемым изобретением является то, что принимают на УО излучение от внешнего источника излучения и вычисляют на УО управляющий сигнал для изменения направления движения УО.
Кроме того, в прототипе внешний источник излучения размещают на цели, измеряют на УО угол между направлением, с которого приходит на УО принятое излучение, и продольной осью УО, задают требуемое значение этого угла и вычисляют разность между измеренным и требуемым значениями этого угла, которой пропорционален управляющий сигнал.
Недостатком прототипа является то, что им невозможно наводить УО на цели, где нельзя разместить внешний источник излучения, которое можно принять на УО.
Задача изобретения - устранение указанного недостатка, а именно обеспечение пассивного самонаведения УО на цели, где невозможно разместить внешний источник излучения (ВИИ), которое можно принять на УО.
Достигается эта задача следующим образом.
В некоторой точке И вне цели размещают ВИИ, вычисляют географические координаты этой точки, измеряют координаты цели относительно точки И и вводят эти координаты в вычислитель, установленный на ВИИ, куда предварительно также вводят цифровую карту района расположения ВИИ и цели. По этой информации в этом вычислителе вычисляют географические координаты цели и высоту цели над уровнем моря, значениями которых кодируют излучение ВИИ. На УО декодируют принятое излучение ВИИ, в результате получают на УО эти координаты цели, которые вводят в вычислитель, установленный на УО. В навигационной системе УО вычисляют географические координаты УО, вычисляют или измеряют составляющие вектора скорости УО, измеряют высоту Hор полета УО над рельефом местности и вводят эту информацию в вычислитель УО, куда предварительно вводят цифровую карту района, в котором проходит полет УО, и вводят также заданное превышение ΔHз высоты полета УО над рельефом местности и заданное значение θтр угла подхода УО к цели в вертикальной плоскости. Кроме того, на УО измеряют значения ωв , ωг угловых скоростей вращения корпуса УО и значения nв, nг управляющих перегрузок УО соответственно в вертикальной и горизонтальной плоскостях и вводят эти значения в вычислитель УО. С использованием введенной информации на УО вычисляют составляющие вектора скорости цели, значения углов Aвоц, Aгоц, Aвv, Aгv ориентации в вертикальной и горизонтальной плоскостях соответственно векторов дальности  и скорости
и скорости  УО относительно цели, требуемое значение вертикальной составляющей скорости УО, значение параметра управления Δг в горизонтальной плоскости, равного разности значений Aгоц и Aгv, значение параметра управления Δв в вертикальной плоскости, равного вначале сумме, первое слагаемое которой пропорционально разности значений ΔHз и Hор, а второе слагаемое пропорционально разности требуемого значения и текущего значения вертикальной составляющей скорости УО, а на заключительном этапе наведения, когда Aвоц больше чем θтр , это второе слагаемое равно разности значений Aвоц и Aвv, также вычисляют на УО управляющий сигнал Uв в вертикальной плоскости, равный алгебраической сумме, слагаемые которой пропорциональны соответственно Δв , ωв и nв, и управляющий сигнал Uв в горизонтальной плоскости, равный алгебраической сумме, слагаемые которой пропорциональны соответственно Δг , ωг и nг.
УО относительно цели, требуемое значение вертикальной составляющей скорости УО, значение параметра управления Δг в горизонтальной плоскости, равного разности значений Aгоц и Aгv, значение параметра управления Δв в вертикальной плоскости, равного вначале сумме, первое слагаемое которой пропорционально разности значений ΔHз и Hор, а второе слагаемое пропорционально разности требуемого значения и текущего значения вертикальной составляющей скорости УО, а на заключительном этапе наведения, когда Aвоц больше чем θтр , это второе слагаемое равно разности значений Aвоц и Aвv, также вычисляют на УО управляющий сигнал Uв в вертикальной плоскости, равный алгебраической сумме, слагаемые которой пропорциональны соответственно Δв , ωв и nв, и управляющий сигнал Uв в горизонтальной плоскости, равный алгебраической сумме, слагаемые которой пропорциональны соответственно Δг , ωг и nг.
На фиг.1 показаны положения УО и цели в текущий момент времени t наведения в горизонтальной (фиг.1,а) и вертикальной (фиг.1,б) плоскостях. На фиг.1 обозначено: УМ - уровень моря; Ц - место расположения цели; ГП - горизонтальная плоскость, проходящая через точку Ц; О, О' - точка, в которой находится УО, и проекция этой точки на поверхность земли; И, И' - точка, в которой находится ВИИ, и проекция этой точки на плоскость ГП;  ,
,  - вектор дальности между ВИИ и целью и его проекция на плоскость ГП; ЦхгУг - прямоугольная система координат, расположенная в плоскости ГП, начало которой находится в точке Ц, ось Цхг направлена по касательной к географическому меридиану, проходящему через цель, а ось Цуг направлена по касательной к географической параллели, проходящей через цель; θи - угол превышения цели относительно точки И; С-Ю - направление магнитного меридиана в точке И; Δи - угол магнитного склонения в точке И; ϕвц - магнитный азимут цели относительно точки И; Хци - проекция вектора
- вектор дальности между ВИИ и целью и его проекция на плоскость ГП; ЦхгУг - прямоугольная система координат, расположенная в плоскости ГП, начало которой находится в точке Ц, ось Цхг направлена по касательной к географическому меридиану, проходящему через цель, а ось Цуг направлена по касательной к географической параллели, проходящей через цель; θи - угол превышения цели относительно точки И; С-Ю - направление магнитного меридиана в точке И; Δи - угол магнитного склонения в точке И; ϕвц - магнитный азимут цели относительно точки И; Хци - проекция вектора  на ось Цхг; Yци - проекция вектора
на ось Цхг; Yци - проекция вектора  на ось Цуг;
на ось Цуг;  ,
,  - вектор дальности между УО и целью и его проекция на плоскость ГП; Xоц, Yоц - координаты точки О' в системе координат Цх;
- вектор дальности между УО и целью и его проекция на плоскость ГП; Xоц, Yоц - координаты точки О' в системе координат Цх;  ,
,  - вектор скорости УО и его проекция на плоскость ГП; Vов - вертикальная составляющая вектора
- вектор скорости УО и его проекция на плоскость ГП; Vов - вертикальная составляющая вектора  ; Vox, Voy - проекция вектора
; Vox, Voy - проекция вектора  на оси Цхг и Цyг;
на оси Цхг и Цyг;  ,
,  - вектор скорости цели и его проекция на плоскость ГП; Vцв - вертикальная составляющая вектора Vц; Vцx, Yцy - проекции вектора
- вектор скорости цели и его проекция на плоскость ГП; Vцв - вертикальная составляющая вектора Vц; Vцx, Yцy - проекции вектора  на оси Цxг и Цyг;
на оси Цxг и Цyг;  ,
,  - вектор скорости УО относительно цели и его проекция на плоскость ГП; Vоцв - вертикальная составляющая вектора
- вектор скорости УО относительно цели и его проекция на плоскость ГП; Vоцв - вертикальная составляющая вектора  ; Vоцх, Vоцу - проекции вектора
; Vоцх, Vоцу - проекции вектора  на оси Цхг и Цуг; Aгоц - угол ориентации вектора
на оси Цхг и Цуг; Aгоц - угол ориентации вектора  в горизонтальной плоскости; Aгv - угол ориентации вектора
в горизонтальной плоскости; Aгv - угол ориентации вектора  в горизонтальной плоскости; Hц - высота точки Ц над УМ; Hи - высота точки И над УМ; Hро - высота точки О над УМ; Aвоц - угол ориентации вектора
в горизонтальной плоскости; Hц - высота точки Ц над УМ; Hи - высота точки И над УМ; Hро - высота точки О над УМ; Aвоц - угол ориентации вектора  в вертикальной плоскости; Aвv - угол ориентации вектора
в вертикальной плоскости; Aвv - угол ориентации вектора  в вертикальной плоскости.
в вертикальной плоскости.
На фиг. 2 показан график зависимости ΔHз (Dгоц) в случае задания этой зависимости ступенчатой функцией. На фиг.2 обозначено: ΔHз - заданное превышение высоты полета УО над рельефом местности;  ,
,  - конкретные заданные значения Hз; Dгоц - дальность между УО и целью в горизонтальной плоскости; Dгоц1 - конкретное заданное значение Dгоц.
- конкретные заданные значения Hз; Dгоц - дальность между УО и целью в горизонтальной плоскости; Dгоц1 - конкретное заданное значение Dгоц.
На фиг.3 представлена структурная схема возможного варианта устройства, реализующего предложенный способ наведения УО на цель. Пунктирными линиями ограничены элементы устройства, находящиеся в месте размещения ВИИ и на УО. В каждом элементе, имеющем более одного входа или выхода, цифрами обозначены номера соответствующих входов и выходов. На фиг.3 обозначено: 1 - приемник системы спутниковой навигации (ПССН); 2 - дальномер; 3 - магнитный компас; 4 - вычислитель; 5 - внешний источник излучения (ВИИ); 6 - приемник излучения ВИИ; 7 - приемник системы спутниковой навигации, находящейся на УО (ПССН УО); 8 - радиовысотомер; 9 - датчик угловой скорости (ДУС) ωв вращения корпуса УО в вертикальной плоскости; 10 - ДУС ωг вращения корпуса УО в горизонтальной плоскости; 11 - датчик управляющей перегрузки (ДУП) nг УО в горизонтальной плоскости; 12 - ДУП nв УО в вертикальной плоскости; 13 - вычислитель УО; ψи , λи - широта и долгота места размещения ВИИ; ЦК1 - цифровая карта района расположения ВИИ и цели; ψц , λц - широта и долгота места расположения цели; ψo , λo - широта и долгота места, в котором находится УО; θтр - требуемое значение угла наклона траектории УО в вертикальной плоскости на заключительном этапе наведения УО или заданный угол подхода УО к цели в вертикальной плоскости; ΔHз - заданное превышение высоты полета УО над поверхностью земли; ЦК2 - цифровая карта района, в котором проходит полет УО; Dб - заданное значение расстояния от УО до текущей точки впереди УО по направлению его полета. Остальные обозначения на фиг.3 такие же как на фиг. 1.
Сущность предлагаемого способа состоит в следующем.
В точке И вне цели (фиг.1) размещают ВИИ и в текущей момент времени t наведения УО на цель измеряют дальность D(t) ВИИ до цели, магнитный азимут ϕвц(t) цели относительно ВИИ, широту ψи(t) и долготу λи(t) и вводят эти величины в вычислитель, установленный на ВИИ. В этот же вычислитель предварительно вводят цифровую карту района расположения ВИИ и цели. С использование координат ψи(t) , λи(t) и цифровой карты в вычислителе ВИИ вычисляют высоту Hи(t) точки И над уровнем моря и угол магнитного склонения Δи(t) в точке И. Кроме того, в вычислителе ВИИ вычисляют широту ψц(t) , долготу λц(t) и высоту Hц(t) над уровнем моря точки Ц по следующему алгоритму:

где Hи(ψи(t) , λи(t)) , Hц(ψц(t) , λц(t)) - однотипные алгоритмы вычисления высоты точки на цифровой карте по известным значениям широты и долготы этой точки;
a, e - большая полуось и эксцентриситет референц - эллипсоида, значения которых известны.
Так как алгоритмы (3) и (4) однотипны, достаточно рассмотреть существо одного из них, например, алгоритма (3). Информация о рельефе местности в цифровой карте района расположения ВИИ и цели содержится в хранящейся в памяти вычислителя матрице высот, каждый элемент Hij (i = 1, 2, ...., n; j = 1, 2, . . . m) которой является высотой над уровнем моря точки местности, имеющей широту i и долготу j. Дискретность этой матрицы составляет по широте
а по долготе
где ψmax , ψmin - максимальная и минимальная широта района, перенесенного на цифровую карту;
λmax , λmin - максимальная и минимальная долгота этого района.
По введенным в вычислитель значениям широты и долготы точки И (фиг. 1) вычисляют те две пары значений аргументов матрицы, внутри которых находятся введенные значения ψи и λи
Используя значения высот Hkl, H(k+1)l, Hk(l+1), H(k+1) (l+1), соответствующие значениям полученных пар

значений аргументов, и считая изменение высоты между этими значениями линейным, получим
где 
По такому же алгоритму вычисляют высоту Hц(t) (4) по входным данным ψц(t) , λц(t) .
Значениями координат цели кодируют параметры излучения ВИИ, например, интервалы времени между импульсами этого излучения. На УО декодируют принятое излучение ВИИ, в результате получают на УО координаты цели и вводят их в вычислитель, установленный на УО. В навигационной системе УО вычисляют широту ψo(t) и долготу  точки О (фиг.1), а также измеряют или вычисляют составляющие Vов(t), Vоx(t), Vоy(t). Кроме того, на УО измеряют высоту Hop(t) полета УО. Эти значения вводят в вычислитель УО, куда предварительно вводят цифровую карту района, в котором проходит полет УО. По введенной информации в вычислителе УО вычисляют:
точки О (фиг.1), а также измеряют или вычисляют составляющие Vов(t), Vоx(t), Vоy(t). Кроме того, на УО измеряют высоту Hop(t) полета УО. Эти значения вводят в вычислитель УО, куда предварительно вводят цифровую карту района, в котором проходит полет УО. По введенной информации в вычислителе УО вычисляют:
1) координаты Dноц(t), Dгоц(t), Aвоц(t), Aгоц(t) положения УО относительно цели (фиг. 1)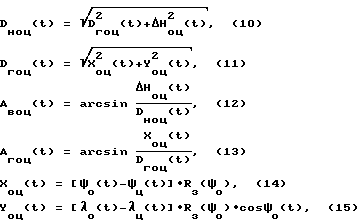
Hоц(t) = Hо(t) - Hц(t), (16)
Hо(t) = Hор(t) + Hро(t), (17)
где Hpo(ψo(t) , λo(t)) - алгоритм, подобный рассмотренному выше алгоритму (9);
2) составляющие вектора  скорости цели
скорости цели

где Δt - заданный интервал времени;
3) составляющие вектора  скорости УО относительно цели
скорости УО относительно цели
Vоцв(t) = Vов(t) - Vцв(t), (24)
Vоцx(t) = Vоx(t) - Vцx(t), (25)
Vоцy(t) = Vоy(t) - Vцy(t); (26)
4) модуль Vоц(t) и углы ориентации Aвv(t), Aгv(t) вектора  скорости УО относительно цели (фиг.1)
скорости УО относительно цели (фиг.1)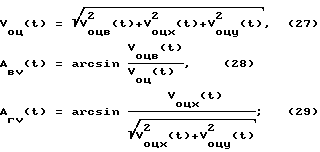
5) требуемое значение Vовп(t) вертикальной составляющей скорости УО

где Dб - заданное расстояние от УО до некоторой точки, расположенной в горизонтальной плоскости впереди УО по направлению его полета. Значение Dб задают из условия безопасности УО от столкновения с землей, например Dб = 500 - 1000 м, и предварительно вводят в вычислитель УО.
Предварительно задают и вводят в вычислитель УО требуемый закон изменения заданного значения ΔHз превышения высоты полета УО над поверхностью земли в зависимости от Dгоц. Зависимость ΔHз(Dгоц) задают в виде ступенчатой или кусочно-линейной функции указанного аргумента. Пример заданной функции ΔHз(Dгоц) показан на фиг. 2. При Dгоц >  где Dгоц = 10 - 12 км, задают
где Dгоц = 10 - 12 км, задают  , где значение
, где значение  = 30 - 50 м, например, задают из соображений безопасности от столкновения УО с землей и снижения вероятности обнаружения УО радиолокационными средствами, расположенными в районе цели. При Dгоц ≤
= 30 - 50 м, например, задают из соображений безопасности от столкновения УО с землей и снижения вероятности обнаружения УО радиолокационными средствами, расположенными в районе цели. При Dгоц ≤  задают
задают  , где значение
, где значение  = 1000 - 2000 м, например, задают из условия обеспечения необходимых условий работы средств обнаружения цели, находящихся на борту УО.
= 1000 - 2000 м, например, задают из условия обеспечения необходимых условий работы средств обнаружения цели, находящихся на борту УО.
Кроме того, задают и вводят в вычислитель УО требуемое значение θтр угла подхода УО к цели в вертикальной плоскости.
В процессе наведения УО на цель в вычислителе УО вычисляют текущие значения Δв(t) параметра управления УО в вертикальной плоскости и Δг(t) параметра управления УО в горизонтальной плоскости. Для заданной функции ΔHз, показанной на фиг. 2, значение Δв(t) вычисляют по следующему алгоритму: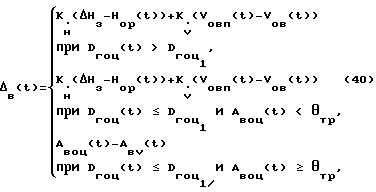
где kH, kv - коэффициенты пропорциональности.
Значение Δг(t) определяют по формуле
Δг(t) = Aгоц(t)-Aгv(t). (41)
В вычислителе УО вычисляют также значения управляющих сигналов Uв(t) и Uг(t) соответственно в вертикальной и горизонтальной плоскостях для изменения направления движения УО в этих плоскостях
где ωв(t), ωг(t) - значения угловой скорости вращения корпуса УО соответственно в вертикальной и горизонтальной плоскостях, которые измеряют в процессе наведения УО;
nв(t), nг(t) - значения управляющей перегрузки УО соответственно в вертикальной и горизонтальной плоскостях, которые измеряют в процессе наведения УО;
k1, k2, k3, k4, k5, k6 - соответствующие коэффициенты пропорциональности.
Таким образом, предлагаемый способ позволяет обеспечить наведение УО на цели, на которых невозможно разместить ВИИ, чем и достигается поставленная задача изобретения.
Устройство, реализующее предложенный способ наведения УО на цель, включает элементы, находящиеся в месте установки ВИИ, и элементы, установленные на УО. В месте установки ВИИ находится ПССН 1, (фиг. 3), дальномер 2, магнитный компас 3, вычислитель 4 и ВИИ 5, причем первый и второй выходы ПССН 1 связаны соответственно с первым и вторым входами вычислителя 4, выход дальномера 2 связан с третьим входом вычислителя 4, выход магнитного компаса 3 связан с четвертым входом вычислителя 4, а первый, второй и третий выходы вычислителя 4 связаны соответственно с первым, вторым и третьим входами ВИИ 5.
На УО установлены приемник излучения ВИИ 6, ПССН УО 7, РВ 8, ДУС 9, ДУС 10, ДУП 11, ДУП 12 и вычислитель 13, причем первый, второй и третий выходы приемника 6 связаны соответственно с шестым, седьмым и восьмым входами вычислителя 13, первый, второй, третий, четвертый и пятый выходы ПССН 7 связаны соответственно с первым, вторым, третьим, четвертым и пятым входами вычислителя 13, выходы ДЛУ 9 и ДЛУ 10 связаны соответственно с десятым и одиннадцатым входами вычислителя 13, а выходы ДУП 11 и ДУП 12 связаны соответственно с двенадцатым и тринадцатым входами вычислителя 13.
Работает это устройство следующим образом.
Предварительно, т.е. до начала наведения УО на цель, на пятый вход вычислителя 4 подают заданную цифровую карту ЦК1 и запоминают эту информацию в вычислителе 4. Также предварительно подают на четырнадцатый вход вычислителя 13 заданную цифровую карту ЦК2, а на пятнадцатый вход вычислителя 13 подают заданную функцию ΔHз (Dгоц). На шестнадцатый вход вычислителя 13 подают заданное значение θтр, а на семнадцатый вход вычислителя 13 - заданное значение Dб. Информацию, поданную на указанные входы вычислителя 13, запоминают в нем. ПССН 1, дальномер 2, магнитный компас 3 и вычислитель 4 и ВИИ 5 устанавливают в точке И (фиг. 1) вне цели. ПССН 1 принимает радиосигналы, излучаемые искусственными спутниками Земли, которые входят в состав системы спутниковой навигации, и вычисляет широту ψи и долготу λи точки И. Значения ψи и λи с выходов ПССН 1 поступают на соответствующие входы вычислителя 4 и запоминаются в нем. С помощью дальномера 2 измеряют дальность D между ВИИ и целью и с выхода дальномера 2 подают значение D на третий вход вычислителя 4. С помощью магнитного компаса 3 измеряют магнитный азимут ϕвц цели относительно ВИИ и с выхода магнитного компаса 3 подают измеренное значение ϕвц на четвертый вход вычислителя 4. С использованием информации, поступающей на его входы, в вычислителе 4 в соответствии с алгоритмом (1) - (8) вычисляют широту ψц(t) , долготу λц(t) и высоту Hц(t) места расположения цели. Эти координаты цели с соответствующих выходов вычислителя 4 (фиг. 3) подают на соответствующие входы ВИИ 5, который излучает в пространство излучение, параметры которого кодируют значениями координат цели. Приемник 6 принимает это излучение, и в результате обработки декодирует его. Поэтому на соответствующих выходах приемника 6 получают значения координат цели, которые подают на соответствующие входы вычислителя 13. ПССН УО 7 принимает радиосигналы, излучаемые искусственными спутниками Земли, которые входят в состав системы спутниковой навигации, и вычисляет широту ψo(t) и долготу λo(t) точки, в которой находится УО, и значения составляющих Vов, Vоx, Vоy скорости УО. Эти значения координат и составляющих скорости УО с соответствующих выходов ПССН УО 7 поступают на соответствующие входы вычислителя 13. РВ 8 измеряет высоту Hор(t), которая с выхода РВ 8 поступает на девятый вход вычислителя 13. ДУС 9 и ДУС 10 измеряют соответственно значения ωг и ωв , которые с выходов этих ДУС подают на соответствующие входы вычислителя 13. ДУП 11 и ДУП 12 измеряют соответственно значения nг(t) и nв(t), которые с выходов этих ДУП подают на соответствующие входы вычислителя 13. С использованием информации, поступившей на его входы, в вычислителе 13 в соответствии с алгоритмом (9) - (43) вычисляют управляющие сигналы Uв(t) и Uг(t) для изменения направления движения УО соответственно в вертикальной и горизонтальной плоскостях.
Источники информации
1. Гладков Д.И. Авиационное вооружение. - М.: Воениздат, 1985, с. 84.
2. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982, с.7.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ ПУСКЕ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2243481C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |


Изобретение относится к способам наведения на цель управляемых объектов класса "воздух-поверхность". Техническим результатом является обеспечение пассивного самонаведения управляемого объекта (УО) на цель (Ц), на которой невозможно разместить внешний источник излучения (ВИИ), которое можно принять на УО. Это достигается установкой ВИИ в некоторой точке вне Ц, определением широты (Ш) и долготы (Д) этой точки, вычислением высоты (В) этой точки над уровнем моря, измерением координат Ц относительно этой точки, вычислением Ш, Д и В над уровнем моря места расположения Ц, причем при вычислении указанных высот используют цифровую карту района расположения Ц и этой точки, предварительно введенную в вычислитель ВИИ, передачей с помощью ВИИ этих координат Ц на УО, измерением на нем В его полета над местностью, вычислением на нем Ш, Д и В над уровнем моря его местонахождения, причем при вычислении этой В используют предварительно введенную в вычислитель УО цифровую карту района, в котором проходит маршрут полета УО, векторов скорости Ц и УО, векторов дальности Доц и скорости Vоц УО относительно Ц, а также параметров управления, которые представляют собой разности углов ориентации векторов Доц и Vоц в вертикальной и горизонтальной плоскостях. Кроме того, для обеспечения безопасности УО от столкновения с землей параметр управления в вертикальной плоскости зависит от разности заданного и текущего значений В полета УО над местностью, а также от разности потребного и текущего значений вертикальной скорости УО. 3 ил.
Способ наведения управляемого объекта на цель, который состоит в том, что принимают на управляемом объекте излучение от внешнего источника излучения и вычисляют значения управляющих сигналов Uв в вертикальной плоскости и Uг в горизонтальной плоскости пропорционально соответствующим значениям параметров управления Δв и Δг в этих плоскостях, отличающийся тем, что внешний источник излучения устанавливают вне цели, измеряют дальность D от места его установки до цели, магнитный азимут ϕвц этого места относительно цели и задают значение θтр угла подхода управляемого объекта к цели в вертикальной плоскости, определяют географические координаты - широту и долготу места установки внешнего источника излучения, вводят их и измеренные значения D, ϕвц в установленный на внешнем источнике излучения вычислитель, в который предварительно вводят цифровую карту района расположения цели, с использованием которой вычисляют значения высоты над уровнем моря места установки внешнего источника излучения и цели, а также вычисляют географические координаты - широту и долготу места расположения цели, кодируют излучение внешнего источника излучения значениями этих координат и высоты над уровнем моря места расположения цели, на управляемом объекте декодируют принятое излучение и получают в результате этого переданные географические координаты цели и ее высоту над уровнем моря, вводят их в установленные на управляемом объекте вычислитель, в который предварительно вводят заданное превышение ΔHз высоты полета управляемого объекта над местностью, заданное расстояние Dб в горизонтальной плоскости от управляемого объекта до текущей точки, находящейся впереди управляемого объекта по направлению его полета, цифровую карту местности, над которой проходит маршрут полета управляемого объекта, и заданное значение θтр, вычисляют в вычислителе управляемого объекта широту и долготу места, в котором он находится, составляющие вектора скорости цели и вектора скорости управляемого объекта, значения модулей и углов ориентации векторов дальности и скорости управляемого объекта относительно цели, требуемое значение вертикальной скорости управляемого объекта, а также значения параметров управления в горизонтальной Δг и вертикальной Δв плоскостях, причем значение Δг равно разности углов ориентации в горизонтальной плоскости векторов дальности и скорости управляемого объекта относительно цели, значение Δв до момента времени tн, при котором достигается равенство угла ориентации в вертикальной плоскости вектора дальности управляемого объекта до цели заданному значению θтр, равно сумме, первое слагаемое которой пропорционально разности значений ΔHз и текущего значения Hор высоты полета управляемого объекта над местностью, а второе слагаемое пропорционально разности требуемого и текущего значений вертикальной скорости управляемого объекта, а с момента времени tн значение Δв равно разности углов ориентации в вертикальной плоскости векторов дальности и скорости управляемого объекта относительно цели.
| Максимов Н.В., Горгонов Г.И | |||
| Радиоэлектронные системы самонаведения | |||
| - М.: Радио и связь, 1982, с.7 | |||
| Гладков Д.И | |||
| Авиационное вооружение | |||
| - М.: Воениздат, 1985, с.84 | |||
| US 3946384 A, 23.03.76 | |||
| МАШИНА ДЛЯ ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ | 2001 |
|
RU2201060C2 |
| US 4665401 A, 12.05.87. | |||
