Изобретение относится к способам радиообмена информацией между дистанционно пилотируемым летательным аппаратом (ДПЛА) и наземными пунктами управления (НПУ) ДПЛА и может быть использовано при создании новых и модернизации существующих систем радиообмена информацией между ДПЛА и этими НПУ.
Известен способ радиообмена информацией между ДПЛА и НПУ [1], состоящий в том, что на ДПЛА и НПУ устанавливают неподвижные всенаправленные антенны. Недостатком этого способа является сравнительно небольшой энергетический потенциал радиолинии, по которой производится радиообмен информацией.
Известен также способ радиообмена информацией между ДПЛА и НПУ [2], состоящий в том, что на ДПЛА устанавливают с возможностью вращения антенну, имеющую достаточно высокую направленность, а также размещают на ДПЛА специальную систему, с помощью которой осуществляют ориентацию этой антенны на НПУ, а на НПУ устанавливают с возможностью вращения антенну с высокой направленностью, а также размещают на НПУ систему углового сопровождения ДПЛА, с помощью которой вырабатывают сигналы целеуказания, в соответствии с которыми управляют положением антенны НПУ. Недостатком этого способа является большая масса антенных устройств, включающих поворотные антенны и системы их ориентации, которые необходимо установить на ДПЛА в случае, когда требуется одновременно осуществлять непрерывный радиообмен информацией между ДПЛА и несколькими НПУ, которые расположены на сравнительно больших расстояниях между собой.
Прототипом заявляемого изобретения следует считать способ радиообмена информацией между ДПЛА и НПУ [2], общими признаками которого с заявляемым изобретением является то, что на НПУ устанавливают с возможностью вращения антенну с высокой направленностью, а также размещают на НПУ систему углового сопровождения ДПЛА, с помощью которой вырабатывают сигналы целеуказания, в соответствии с которыми управляют положением антенны НПУ.
Кроме того, в прототипе на ДПЛА устанавливают с возможностью вращения антенну, имеющую достаточно высокую направленность, а также размещают на ДПЛА специальную систему, с помощью которой осуществляют ориентацию этой антенны на НПУ.
Недостатком прототипа является большая масса антенных устройств, включающих поворотные антенны и системы их ориентации, которые необходимо установить на ДПЛА в случае, когда требуется одновременно осуществлять непрерывный радиообмен информацией между ДПЛА и несколькими НПУ, которые расположены на сравнительно больших расстояниях между собой. Это объясняется следующим. Масса Mayj одного антенного устройства, которое используется в прототипе, можно определить следующим выражением
Mayj = May + Mcoj, (1)
где Mcoj = Mпj + Мдвj + Мумj + Мипj, (2)
Maj - масса собственно антенны; Mcoj - масса системы ориентации антенны; Mпj - масса устройств, обеспечивающих установку антенны с возможностью вращения относительно корпуса ДПЛА; Мдвj - масса электродвигателя с редуктором, осуществляющего поворот антенны; Mумj - масса усилителя, управляющего работой этого электродвигателя; Mипj - масса источников электропитания, необходимого для работы электродвигателя и усилителя. При изменении положения ДПЛА относительно НПУ в процессе полета ДПЛА система ориентации антенны должна быстро изменять положение антенны для обеспечения непрерывности обмена информацией между ДПЛА и НПУ. Поэтому электродвигатель, усилитель и источники их электропитания должны обладать достаточной мощностью, вследствие чего значение Mcoj является сравнительна большим.
Пусть в процессе применения ДПЛА ему требуется одновременно осуществлять непрерывный радиообмен информацией с несколькими НПУ, причем расстояния между НПУ таковы, что при высокой направленности антенны ДПЛА в пределах ее диаграммы направленности может находиться только один НПУ, на который направлена эта антенна системой ориентации, а другие НПУ находятся за пределами диаграммы направленности этой антенны ДПЛА. Поэтому при необходимости одновременного непрерывного радиообмена между ДПЛА и этими НПУ на ДПЛА требуется установить такое число таких антенных устройств, которое равно количеству N этих НПУ. Очевидно, что масса Мауn этих антенных устройств ДПЛА определяется выражением
где значение Мауj определяется выражениями (1) и (2). Следовательно, при большом числе НПУ и значительной массе Mcoj величина Мауn массы антенных устройств получается большой.
Целью заявляемого изобретения является устранение указанного недостатка прототипа, а именно, уменьшение массы Мауn антенных устройств, которые необходимо установить на ДПЛА в случае, когда требуется одновременно осуществлять непрерывный радиообмен информацией между ДПЛА и несколькими НПУ, которые расположены на сравнительно больших расстояниях между собой, при сохранении достаточного энергетического потенциала радиолинии, по которой производится радиообмен информацией между ДПЛА и НПУ.
Эта цель достигается тем, что в заявляемом изобретении на ДПЛА неподвижно устанавливают не менее двух направленных антенн, суммарная диаграмма направленности которых в горизонтальной плоскости является всенаправленной, и антенный коммутатор, в вычислитель ДПЛА предварительно вводят значения угла Ск магнитного склонения в районе полета ДПЛА, географических широты Шпi и долготы Дпi местоположения каждого НПУ, с которым необходимо осуществлять радиообмен информацией, а также значения граничных углов Амj, Абj диаграммы направленности каждой антенны ДПЛА относительно его продольной оси в горизонтальной плоскости и параметров Аp, Еp референц-эллипсоида Земли, в процессе полета ДПЛА измеряют на нем текущие значения угла Мк ориентации продольной оси ДПЛА относительно магнитного меридиана и географических широты Шд и долготы Дд его местоположения, с использованием значений Шпi, Дпi, Аp, Еp, Ск, Мк, Шд и Дд в вычислителе ДПЛА вычисляют текущие значения углов Азгi и Дзi азимута в горизонтальной плоскости на каждый НПУ относительно географического меридиана и относительно продольной оси ДПЛА соответственно, с использованием значений Азi, Амj и Aбj в вычислителе ДПЛА определяют те антенны ДПЛА, в пределах диаграмм направленности которых находятся соответствующие НПУ, и с помощью антенного коммутатора подключают эти антенны ДПЛА к выходу передатчика ДПЛА для передачи информации с ДПЛА на соответствующие НПУ или к входу приемника для приема на ДПЛА информации от соответствующих НПУ.
Существо предлагаемого способа поясняется схемами, изображенными на фиг. 1 и 2. На фиг.1 показана схема, поясняющая решение задачи определения на ДПЛА той антенны, с помощью которой устанавливается радиообмен с НПУi, для случая установки на ДПЛА четырех антенн, диаграмма направленности по уровню 0,5 в горизонтальной плоскости каждой из которых имеет угловой размер 90 градусов. На фиг. 1 обозначено: 0 - положение центра массы ДПЛА в горизонтальной плоскости, которое является началом системы координат OXY, у которой ось ОХ направлена по касательной к географическому меридиану, проходящему через точку 0, а ось OY направлена по касательной к географической параллели, проходящей через точку О; ОХм - проекция на горизонтальную плоскость направления магнитного меридиана, проходящего через точку 0; OХ1 - проекция на горизонтальную плоскость продольной оси ДПЛА; НПУ1 (Шп1, Дп1), НПУ2 (Шп2, Дп2), НПУi (Шпi, Дпi), НПУк (Шпк, Дпк) - местоположения соответствующих НПУ в горизонтальной плоскости с указанием для каждого НПУ значений географических широты Ш и долготы Д; АБВГ - граница суммарной диаграммы направленности четырех антенн ДПЛД в горизонтальной плоскости; Ск - угол магнитного склонения; Мк - угол ориентации продольной оси ДПЛА относительно магнитного меридиана; Азгi - угол азимута, в горизонтальной плоскости на каждый НПУ относительно географического меридиана; Азi - угол азимута в горизонтальной плоскости на каждый НПУ относительно продольной оси ДПЛА; Амj, Абj (j=1, 2, 3, 4) - граничные углы диаграммы направленности соответствующей антенны ДПЛА относительно его продольной оси в горизонтальной плоскости.
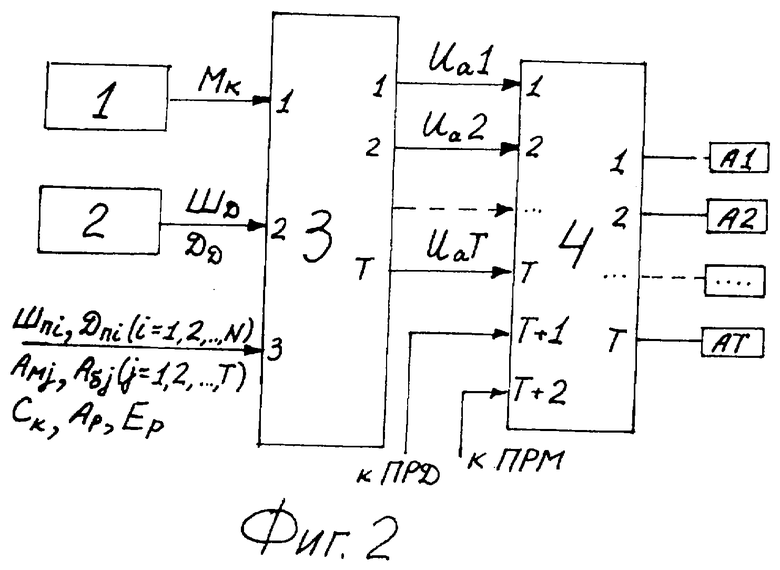
На фиг. 2 показана структурная схема возможного варианта устройства, реализующего предложенный способ. На фиг.2 обозначено: 1 - магнитный компас (МК) ДПЛА; 2 - приемник системы спутниковой навигации (ПССН) ДПЛА; 3 - вычислитель (В) ДПЛА с входами 1, 2, 3 и выходами 1, 2,...,Т; 4 - антенный коммутатор (АК) с входами 1, 2,...,Т, Т+1, Т+2 и выходами 1, 2,...,Т; Т - количество антенн, подключаемых к выходу АК; А1, А2,..., AT - антенны ДПЛА; Uaj - управляющий сигнал; ПРД - радиопередатчик ДПЛА; ПРМ - радиоприемник ДПЛА; N - количество НПУ, с которыми ДПЛА обменивается информацией; Ск - угол магнитного склонения в районе полета ДПЛА; Ар, Ер - параметры референц-эллипсоида Земли. Остальные обозначения на фиг.2 соответствуют обозначениям, введенным на фиг.1.
Существо предлагаемого способа состоит в следующем. Предварительно в память вычислителя ДПЛА вводят: а) заданные значения географических широты Шпi и долготы Дпi (i = 1, 2, ..., N) местоположения тех НПУ, о которыми ДПЛА должен обмениваться информацией; б) заданное значение Ск угла магнитного склонения в районе полета ДПЛА; в) заданные значения большой полуоси Ар и эксцентриситета Ер референц-эллипсоида Земли; г) заданные значения Амj, Aбj (j=1, 2, ..., Т) граничных углов диаграммы направленности соответствующей антенны ДПЛА относительно его продольной оси в горизонтальной плоскости, причем Ам(j+1)=Aбj.
На ДПЛА неподвижно относительно корпуса ДПЛА устанавливают Т антенн так, чтобы границы диаграммы направленности каждой из антенн по заданному уровню в горизонтальной плоскости были равны Амj и Aбj (j=1, 2,..., Т). В процессе полета ДПЛА на нем измеряют: а) текущие значения Шд, Дд географических координат его местоположения; б) текущее значение Мк. Эти измеренные значения вводят в вычислитель ДПЛА, где с использованием их, а также предварительно введенных значений Шпi и Дпi (i=1, 2, ..., N), Ск, Ар, Ер, Амj, Aбj (j=1, 2, ..., Т) для каждого НПУ вычисляют:
1) текущее значение Азгi по формулам
dXндi = (Шпi - Шд)•Rз (Шд); (5)
dYндi = (Дпi - (Дд)•Rз (Шд)•cos (Шд); (6)
2) текущее значение Азi по формуле
Азi = Азгi - (Мк - Ск) (8)
С использованием полученных значений Азi в вычислителе ДПЛА формируют управляющий сигнал Uaj по следующему алгоритму
Управляющий сигнал Uaj (9) с выхода вычислителя поступает на вход антенного коммутатора. Если
Uaj=1,
то в соответствии с логикой работы антенного коммутатора он подключает антенну с номером "j" к выходу передатчика ДПЛА, периодически на короткое время переключая эту антенну к входу приемника ДПЛА. Если же
Uaj=0,
то антенный коммутатор отключает антенну с номером "j" как от выхода передатчика, так и от входа приемника ДПЛА.
Устройство, которое реализует предлагаемый способ, содержит (фиг.2) МК 1, ПССН 2, В 3, АК 4 и антенны A1, A2, ..., AT ДПЛА, неподвижно установленные на ДПЛА, причем выход МК 1 электрически связан с правым входом В 3, выход ПССН 2 электрически связан со вторым входом В 3, третий вход В 3 электрически связан с выходом устройства ввода значений Шпi, Дпi, Ск, Ар, Ер, Амj, Aбj (i=1, 2,..., N; j=1, 2,..., Т), первые Т выходов В 3 электрически связаны с соответствующими Т входами АК 4, вход Т+1 АК 4 электрически связан с выходом ПРД ДПЛА, вход Т+2 АК 4 электрически связан с входом ПРМ ДПЛА, а выходы 1, 2, ..., Т АК 4 электрически связаны с соответствующими антеннами A1, А2, ..., AT ДПЛА.
Работает это устройство следующим образом. Предварительно на третий вход В 3 подают значения Шпi, Дпi, Ар, Ер, Ск, Амj, Aбj (i=1, 2, ...,N; j=1, 2, . . . ,Т) и запоминают эту информацию в В 3. В ходе полета ДПЛА с помощью МК 1 измеряют текущее значение Мк и подают его на первый вход В 3, а с помощью ПССН 2 измеряют текущие значения Щд и Дд и подают их на второй вход В 3. В В 3 на основе информации, поданной на его входы, по рассмотренному выше алгоритму ((4), ..., (8)) вычисляют на борту ДПЛА значения Азгi и Азi для каждого из заданных НПУ и значения управляющего сигнала Uaj (9) для каждой антенны ДПЛА. Если Uaj=1 (j=1, 2, ..., Т), то АК 4 подключает соответствующую антенну Aj к Т+1-му входу АК 4 и периодически на короткое время переключает эту антенну на Т+2-й вход АК 4, затем вновь подключая ее к Т+1-му входу АК 4. Если Uaj= 0, то АК 4 отключает соответствующую антенну Aj как от Т+1-го входа АК 4, так и от Т+2-го входа АК 4.
Масса Man антенного устройства, которое реализует предложенный способ одновременного и непрерывного радиообмена информацией между ДПЛА и несколькими НПУ, число которых равно N, определяется следующим выражением
где Mai - масса одной из N одинаковых антенн ДПЛА; Мак - масса антенного коммутатора. Антенный коммутатор содержит N маломощных электронных релейных устройств, масса которых сравнительно невелика. Это соображение, а также проведенный выше анализ величины Mcoj (2) позволяет считать, что
вследствие чего между Мауn (3) и Man (10) справедливо соотношение
Man < Мауn. (11)
Таким образом, в предлагаемом способе за счет неподвижной установки на ДПЛА нескольких направленных антенн, работа которых организуется в соответствии с рассмотренным выше алгоритмом, достигается цель изобретения.
Источники информации
1. Е.Д. Федосов (редактор), "Дистанционно пилотируемые летательные аппараты капиталистических стран" (Обзор по материалам иностранной печати), - М. , Научно-информационный центр, 1989 г., стр.130.
2. В. А. Вейцель, В.Н. Типугин (редакторы), "Основы радиоуправления", - М., "Советское радио", 1973 г., стр.194.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯ ЗРЕНИЯ СИСТЕМЫ ОБЗОРА | 2000 |
|
RU2183023C2 |
Изобретение относится к способам радиообмена информацией между дистанционно пилотируемым летательным аппаратом (ДПЛА) и наземными пунктами управления (НПУ). Технический результат - уменьшение массы антенных устройств ДПЛА при одновременном непрерывном радиообмене информацией между ДПЛА и несколькими НПУ, расположенными на сравнительно больших расстояниях друг от друга, при сохранении достаточного энергетического потенциала радиолинии, по которой производится радиообмен информацией. Этот результат достигается тем, что на ДПЛА неподвижно устанавливают не менее двух направленных антенн, суммарная диаграмма направленности которых в горизонтальной плоскости является всенаправленной, и антенный коммутатор, который обеспечивает подключение к радиопередатчику или к приемнику ДПЛА той антенны, в пределах диаграммы направленности которой находится НПА, находящиеся в районе полета ДПЛА, и которая определяется посредством вычислителя, обеспечивающего вычисление текущих углов азимута НПУ. 2 ил.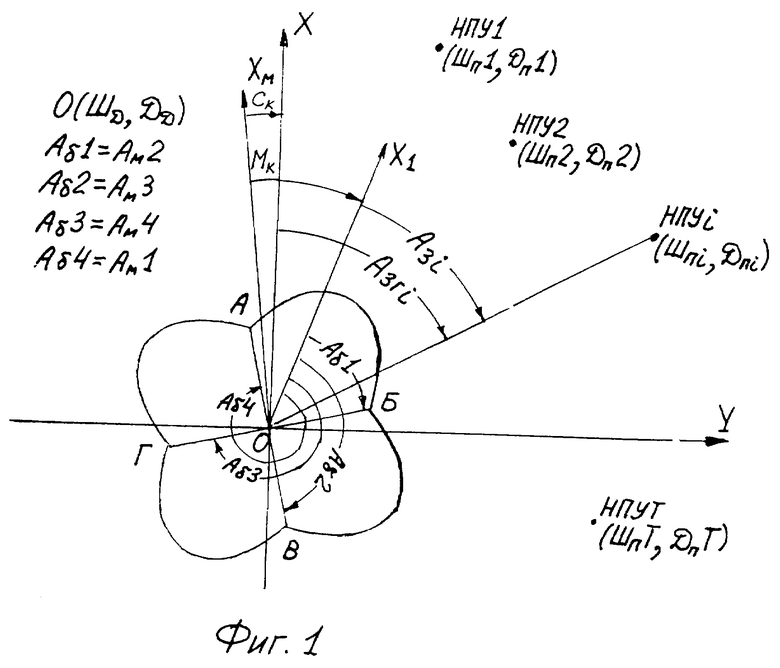
Способ радиообмена информацией, который состоит в том, что на каждом наземном пункте управления устанавливают с возможностью вращения антенну с высокой направленностью и систему углового сопровождения дистанционно пилотируемого летательного аппарата, с помощью которой вырабатывают сигналы целеуказания, в соответствии с которыми управляют положением этой антенны, а в этот летательный аппарат устанавливают вычислитель, отличающийся тем, что на этом летательном аппарате неподвижно устанавливают не менее двух направленных антенн, суммарная диаграмма направленности которых в горизонтальной плоскости является всенаправленной, и антенный коммутатор, в этот вычислитель предварительно вводят значения угла Ск магнитного склонения в районе полета этого летательного аппарата, географических широты Шпi и долготы Дпi местоположения каждого из этих пунктов управления, а также значения граничных углов Амj, Aбj диаграммы направленности каждой антенны в горизонтальной плоскости относительно продольной оси этого летательного аппарата, большой полуоси Ар и эксцентриситета Ер референц-эллипсоида Земли, в процессе полета этого летательного аппарата измеряют на нем текущие значения угла Мк ориентации его продольной оси относительно магнитного меридиана и географических широты Шд и долготы Дд его местоположения с использованием значений Шпi, Дпi, Ар, Ер, Ск, Мк, Шд и Дд в этом вычислителе вычисляют текущие значения углов Азгi и Азi азимута в горизонтальной плоскости на каждый наземный пункт управления относительно географического меридиана и относительно продольной оси этого летательного аппарата соответственно, с использованием значений Азi, Амj и Aбj в этом вычислителе определяют те антенны этого летательного аппарата, в пределах диаграмм направленности которых в горизонтальной плоскости находятся соответствующие наземные пункты управления, и с помощью антенного коммутатора подключают эти антенны к выходу радиопередатчика этого летательного аппарата или к входу радиоприемника этого летательного аппарата.
| Основы радиоуправления /Под ред | |||
| Вейцеля В.А | |||
| и др | |||
| - М.: Советское радио, 1973, с | |||
| Кран машиниста для автоматических тормозов с сжатым воздухом | 1921 |
|
SU194A1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2148795C1 |
| US 4665401, 12.05.1987. | |||

