Изобретение относится к способам определения скорости ветра на летательном аппарате (ЛА), совершающем полет, и может быть использовано при создании новых и модернизации существующих прицельно-навигационных систем (ПНС) ЛА.
Известен способ определения скорости ветра [1], который состоит в том, что в процессе полета ЛА с него в сторону Земли передают радиотехническое излучение, на ЛА принимают отраженное от Земли это излучение, измеряют допплеровский сдвиг частоты между переданным и принятым излучениями, с использованием этого сдвига вычисляют горизонтальную составляющую Wд путевой скорости и угол отклонения Ад этой составляющей от вертикальной плоскости, проходящей через продольную ось ЛА, также на ЛА измеряют модуль V вектора  воздушной скорости ЛА, угол Аа атаки, угол В скольжения, углы ν тангажа и γ крена ЛА, вводят значения Wд, Ад, V, Аа, В, ν и γ в вычислитель ЛА и с использованием этих значений вычисляют значения проекций вектора
воздушной скорости ЛА, угол Аа атаки, угол В скольжения, углы ν тангажа и γ крена ЛА, вводят значения Wд, Ад, V, Аа, В, ν и γ в вычислитель ЛА и с использованием этих значений вычисляют значения проекций вектора  скорости ветра на оси связанной системы координат ЛА. Недостатком этого способа является то, что необходимое для его реализации радиотехническое излучение с ЛА демаскирует полет ЛА.
скорости ветра на оси связанной системы координат ЛА. Недостатком этого способа является то, что необходимое для его реализации радиотехническое излучение с ЛА демаскирует полет ЛА.
Известен также способ определения скорости ветра [2], который состоит в том, что предварительно в вычислитель ЛА вводят значение фокусного расстояния f объектива оптической визирной системы (ОВС) ПНС, в процессе полета ЛА с помощью ОВС обнаруживают наземный ориентир, изменяют курс полета ЛА так, чтобы в момент времени То вектор  скорости ЛА относительно воздуха был направлен на этот ориентир, в момент времени То накладывают на этот ориентир перекрестие сетки ОВС, измеряют на ЛА значения магнитного курса Fo, высоты Н и модуля V вектора
скорости ЛА относительно воздуха был направлен на этот ориентир, в момент времени То накладывают на этот ориентир перекрестие сетки ОВС, измеряют на ЛА значения магнитного курса Fo, высоты Н и модуля V вектора  скорости полета ЛА, вводят значение Н в вычислитель ЛА и запоминают в нем это значение, значение V вводят в систему счисления пути и включают в работу эту систему, с момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fo, H и V, в момент времени Тк измеряют на ЛА приращение времени dT=Тк-То, величину R отклонения этого ориентира в поле зрения ОВС от центра этого перекрестия и угол Е ориентации этого отклонения относительно продольной оси перекрестия, являющийся курсовым углом вектора U скорости ветра, вводят значения R и dT в вычислитель ЛА, где с использованием значений f, Н, R и dT вычисляют значение модуля U вектора
скорости полета ЛА, вводят значение Н в вычислитель ЛА и запоминают в нем это значение, значение V вводят в систему счисления пути и включают в работу эту систему, с момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fo, H и V, в момент времени Тк измеряют на ЛА приращение времени dT=Тк-То, величину R отклонения этого ориентира в поле зрения ОВС от центра этого перекрестия и угол Е ориентации этого отклонения относительно продольной оси перекрестия, являющийся курсовым углом вектора U скорости ветра, вводят значения R и dT в вычислитель ЛА, где с использованием значений f, Н, R и dT вычисляют значение модуля U вектора  прямо пропорционально значению R и обратно пропорционально значению dT. Недостатком этого способа является невозможность определения скорости ветра в условиях дождя, тумана и сплошной облачности между Землей и ЛА.
прямо пропорционально значению R и обратно пропорционально значению dT. Недостатком этого способа является невозможность определения скорости ветра в условиях дождя, тумана и сплошной облачности между Землей и ЛА.
Ближайшим аналогом (прототипом) заявляемого изобретения следует считать способ определения скорости ветра [2], общими признаками которого с заявляемым изобретением является то, что в процессе полета ЛА в момент времени То измеряют на ЛА значения магнитного курса Fo, высоты Н и модуля V вектора  скорости полета ЛА, вводят значение Н в вычислитель ЛА и запоминают в нем это значение, с момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fo, Н и V, в момент времени Тк измеряют на ЛА приращение времени dT=Тк-То и вводят значение dT в вычислитель ЛА, где вычисляют значение модуля U вектора
скорости полета ЛА, вводят значение Н в вычислитель ЛА и запоминают в нем это значение, с момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fo, Н и V, в момент времени Тк измеряют на ЛА приращение времени dT=Тк-То и вводят значение dT в вычислитель ЛА, где вычисляют значение модуля U вектора  скорости ветра обратно пропорционально значению dT.
скорости ветра обратно пропорционально значению dT.
Кроме того, в прототипе предварительно в вычислитель ЛА вводят значение фокусного расстояния f объектива оптической визирной системы (ОВС) ПНС, в процессе полета ЛА с помощью ОВС обнаруживают наземный ориентир, изменяют курс полета ЛА так, чтобы в момент времени То вектор  скорости ЛД относительно воздуха был направлен на этот ориентир, в этот момент времени То накладывают на этот ориентир перекрестие сетки ОВС, вводят значение V в систему счисления пути и включают в работу эту систему, в момент времени Тк измеряют величину R отклонения этого ориентира в поле зрения ОВС от центра этого перекрестия и угол Е ориентации этого отклонения относительно продольной оси перекрестия, являющийся курсовым углом вектора
скорости ЛД относительно воздуха был направлен на этот ориентир, в этот момент времени То накладывают на этот ориентир перекрестие сетки ОВС, вводят значение V в систему счисления пути и включают в работу эту систему, в момент времени Тк измеряют величину R отклонения этого ориентира в поле зрения ОВС от центра этого перекрестия и угол Е ориентации этого отклонения относительно продольной оси перекрестия, являющийся курсовым углом вектора  скорости ветра, вводят значение R в вычислитель ЛА, где с использованием значений f, Н и R вычисляют значение модуля U вектора
скорости ветра, вводят значение R в вычислитель ЛА, где с использованием значений f, Н и R вычисляют значение модуля U вектора  прямо пропорционально значению R.
прямо пропорционально значению R.
Недостатком этого способа является невозможность определения скорости ветра в условиях дождя, тумана и сплошной облачности между Землей и ЛА. Это объясняется тем, что в этих условиях между земной поверхностью и ЛА находятся слои мелких капель воды, которые интенсивно рассеивают оптическое излучение от земной поверхности, в результате чего оно не приходит на ЛА. Поэтому с помощью ОВС невозможно обнаружить на ЛА наземный ориентир и, следовательно, направить на этот ориентир вектор  скорости ЛА относительно воздуха, наложить на этот ориентир перекрестие сетки ОВС и измерить величину R отклонения этого ориентира в поле зрения ОВС от центра перекрестия и угол Е ориентации этого отклонения относительно продольной оси перекрестия.
скорости ЛА относительно воздуха, наложить на этот ориентир перекрестие сетки ОВС и измерить величину R отклонения этого ориентира в поле зрения ОВС от центра перекрестия и угол Е ориентации этого отклонения относительно продольной оси перекрестия.
Целью заявляемого изобретения является устранение указанного недостатка прототипа, а именно определение скорости ветра в условиях дождя, тумана и сплошной облачности без использования радиотехнического излучения с ЛА, которое демаскирует его.
Эта цель достигается тем, что в заявляемом способе предварительно вводят в вычислитель ЛА значение Fм угла магнитного склонения в районе полета ЛА, а также значения Е эксцентриситета и А большой полуоси референц-эллипсоида Земли, и запоминают эти значения в вычислителе ЛА. В процессе полета ЛА в момент времени То на ЛА определяют значения географических широты ГШо и долготы ГДо местоположения ЛА с помощью системы спутниковой навигации, измеряют значения магнитного курса Fo, высоты Н и модуля V вектора  скорости полета ЛА, вводят значения ГШо, ГДо, Н и V в вычислитель ЛА и запоминают их в этом вычислителе. С момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fo, Н и V. В момент времени Тк измеряют на ЛА приращение времени dT=Тк-То и определяют значения географических широты ГШк и долготы ГДк местоположения ЛА с помощью системы спутниковой навигации, вводят значения dT, ГШк, ГДк в вычислитель ЛА, где с использованием значений Fм, Е, А, Fo, ГШо, ГДо, V, Н, dT, ГШк, ГДк вычисляют значения модуля U и угла Fв ориентации вектора
скорости полета ЛА, вводят значения ГШо, ГДо, Н и V в вычислитель ЛА и запоминают их в этом вычислителе. С момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fo, Н и V. В момент времени Тк измеряют на ЛА приращение времени dT=Тк-То и определяют значения географических широты ГШк и долготы ГДк местоположения ЛА с помощью системы спутниковой навигации, вводят значения dT, ГШк, ГДк в вычислитель ЛА, где с использованием значений Fм, Е, А, Fo, ГШо, ГДо, V, Н, dT, ГШк, ГДк вычисляют значения модуля U и угла Fв ориентации вектора  скорости ветра относительно географического меридиана.
скорости ветра относительно географического меридиана.
Сущность предлагаемого способа поясняется схемами, изображенными на фиг. 1 и фиг.2.
На фиг.1 показаны местоположения ЛА в моменты времени То и Тк его полета. На фиг.1 обозначено: O - точка местоположения ЛА в момент времени То; К - точка местоположения ЛА в момент времени Тк;  - вектор скорости ЛА относительно воздуха в момент времени То; П - точка, в которой находился бы ЛА в момент времени Тк, если бы в отсутствии ветра ЛА совершал полет из точки O с постоянным вектором скорости
- вектор скорости ЛА относительно воздуха в момент времени То; П - точка, в которой находился бы ЛА в момент времени Тк, если бы в отсутствии ветра ЛА совершал полет из точки O с постоянным вектором скорости  ; OXZ - прямоугольная система координат, ось ОХ которой направлена на север по касательной к географическому меридиану, проходящему через точку O, а ось OZ направлена на запад по касательной к географической параллели, проходящей через точку O; ОМ - направление магнитного меридиана, проходящего через точку O; Fo - угол магнитного курса ЛА в точке O; Fм - угол магнитного склонения; Хп, Zп - координаты точки П в системе координат OХZ; Хк, Zк - координаты точки К в системе координат OXZ;
; OXZ - прямоугольная система координат, ось ОХ которой направлена на север по касательной к географическому меридиану, проходящему через точку O, а ось OZ направлена на запад по касательной к географической параллели, проходящей через точку O; ОМ - направление магнитного меридиана, проходящего через точку O; Fo - угол магнитного курса ЛА в точке O; Fм - угол магнитного склонения; Хп, Zп - координаты точки П в системе координат OХZ; Хк, Zк - координаты точки К в системе координат OXZ;  - вектор скорости ветра; Fв - угол ориентации вектора
- вектор скорости ветра; Fв - угол ориентации вектора  относительно географического меридиана.
относительно географического меридиана.
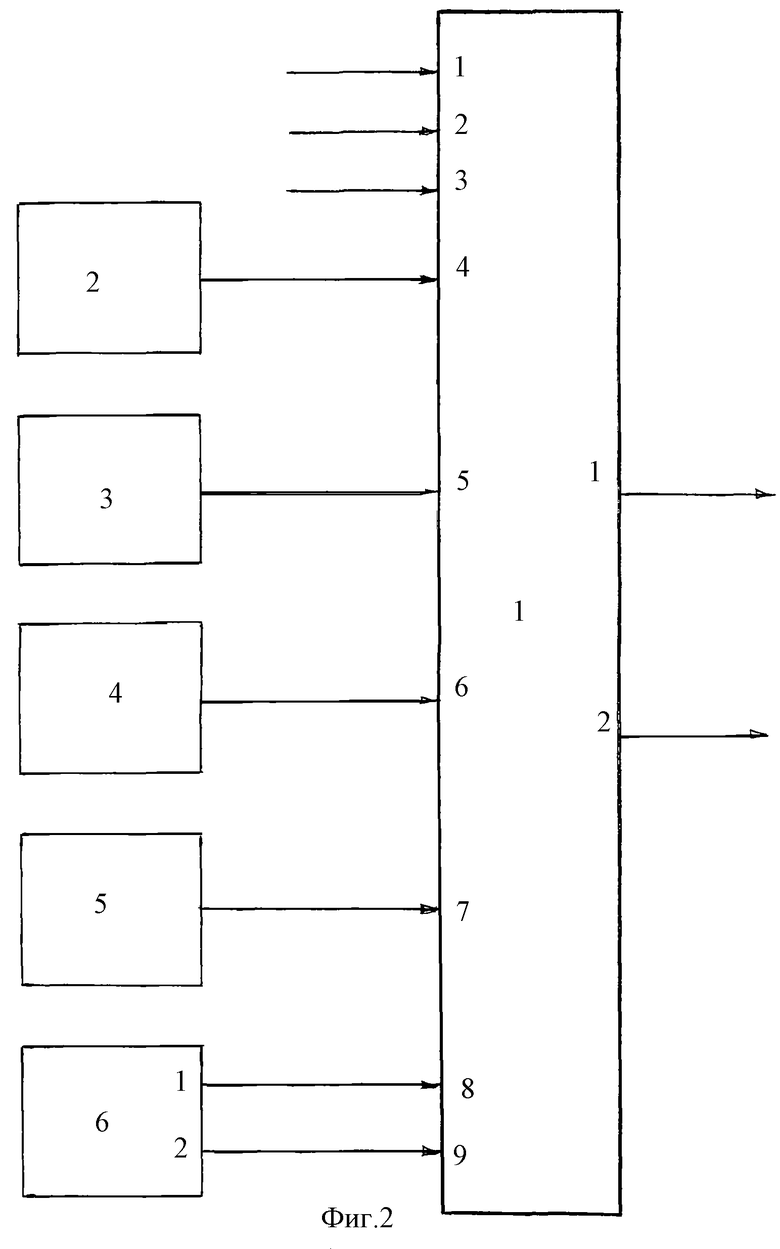
На фиг. 2 показана блок-схема возможного варианта устройства, реализующего предложенный способ. На фиг.2 обозначено: 1 - вычислитель (В) ЛА; 2 - часы (Ч) ЛА; 3 - магнитный компас (МК) ЛА; 4 - измеритель высоты (ИВ) ЛА; 5 - измеритель скорости (ИС) ЛА; 6 - приемник системы спутниковой навигации (ПССН) ЛА. В каждом блоке, имеющем два и более входов и (или) выходов, соответствующие входы и выходы пронумерованы.
Сущность заявляемого способа состоит в следующем. Предварительно до взлета ЛА в вычислитель ЛА вводят значение Fм угла магнитного склонения в районе полета ЛА, а также значения Е эксцентриситета и А большой полуоси референц-эллипсоида Земли, и запоминают эти значения в этом вычислителе. В момент времени То полета ЛА, когда ЛА находится в некоторой точке О и совершает полет на высоте Н со скоростью V и магнитным курсом Fo, на ЛА определяют значения географических широты ГШо и долготы ГДо его местоположения с помощью системы спутниковой навигации, измеряют значения Н, V, Fo, вводят значения ГШо, ГДо, Н, V и Fo в вычислитель ЛА и запоминают эти значения в этом вычислителе. С момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fo, H и V. В заданный момент времени Тк>То измеряют на ЛА приращение времени
dT=Тк-То (1)
и определяют значения географических широты ГШк и долготы ГДк местоположения ЛА с помощью системы спутниковой навигации. Значения dT, ГШк и ГДк вводят в вычислитель ЛА, где с использованием значений Fм, Е, А, Fo, ГШо, ГДо, V, H, dT, ГШк, ГДк вычисляют:
а) координаты Хп, Zп точки П и Хк, Zk точки К (фиг.1)
Хп=V•dT•cos(Fo-Fм), (2)
Zп=V•dT•sin(Fo-Fм); (3)
Хк=(R(ГШо)+H)•(ГШк-ГШо), (4)
Zк=(R(ГШо)+Н)•(ГДк-ГДо)•cos(ГШо), (5)
б) значения OK и dZ (фиг/1)
dZ=Zк-Zп; (8)
в) значения U, Fвн и Fв (фиг.1)
U=OK/dT; (9)
Fвн=arcsin(dZ/OK), (10)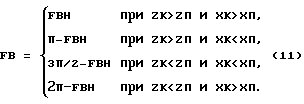
Таким образом, для определения скорости ветра (значения U и Fв) предлагаемым способом требуется в отличие от прототипа определять на ЛА значения географических широты и долготы местоположения ЛА в двух точках траектории его полета. Для этого на ЛА принимают радиотехническое излучение от искусственных спутников Земли, входящих в систему спутниковой навигации, на распространение которого к ЛА туман, дождь и сплошная облачность не оказывают влияния, что и позволяет достичь цели изобретения.
В состав возможного варианта устройства, реализующего предложенный способ, входят (фиг. 2): В 1, Ч 2, МК 3, ИВ 4, ИС 5 и ПССН 6, причем первый, второй и третий входы В 1 соединены с соответствующими выходами устройства предварительного ввода информации в В 1, выход Ч 2 соединен с четвертым входом В 1, выход МК 3 соединен с пятым входом В 1, выход ИВ 4 соединен с шестым входом В 1, выход ИС 5 соединен с седьмым входом В 1, первый выход ПССН 6 соединен с восьмым входом В 1, второй выход ПССН 6 соединен с девятым входом В 1, а первый и второй выходы В1 соединены с соответствующими входами блоков прицельно навигационной системы ЛА, являющихся потребителями значений U и Fв.
Работает это устройство следующим образом. Предварительно до взлета ЛА на первый, второй и третий входы В 1 с соответствующих выходов устройства предварительного ввода информации подают соответственно значения Fм, Е, А и запоминают в В 1 эти значения. В процессе полета ЛА на четвертый вход В 1 с выхода Ч 2 подают значение времени То и в этот момент времени с выхода МК 3 на пятый вход В 1 подают значение Fo, с выхода ИВ 4 на шестой вход В 1 подают значение Н, с выхода ИС 5 на седьмой вход В 1 подают значение V, с первого выхода ПССН 6 на восьмой вход В 1 подают значение ГШо, а со второго выхода ПССН 6 на девятый вход В 1 подают значение ГДо и запоминают в В 1 значения То, Fo, Н, V, ГШо, ГДо. С момента времени То до заданного момента времени Тк>То выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fo, Н и V. В момент времени Тк с выхода Ч 2 подают на четвертый вход В 1 значение времени Тк, с первого выхода ПССН 6 на восьмой вход В 1 подают значение ГШк, а со второго выхода ПССН 6 на девятый вход В 1 подают значение ГДк и запоминают в В 1 эти значения. После этого в В 1 по формулам (1)...(11) вычисляют значения U и Fв, которые соответственно с первого и второго выходов В1 подают на соответствующие входы блоков прицельно навигационной системы ЛА, являющихся потребителями значений U и Fв.
Источники информации
1. Р. В. Мубаракшин, В. М. Балуев, Б.В. Воронов, "Прицельные системы стрельбы", часть 1, Издание ВВИА им. проф. Н.Е. Жуковского, 1973 г., стр. 224-225.
2. Б.П. Александров, Ю.А. Афанасьев, Б.А. Бахарев, В.Г. Григорьев и др., "Авиационное вооружение", Издание ВВИА им. проф. Н.Е. Жуковского, 1971 г., стр.388 - 390.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ ПУСКЕ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2243481C1 |
Использование: при создании новых и модернизации существующих прицельно-навигационных систем летательных аппаратов (ЛА). Сущность: предварительно вводят в вычислитель (В) ЛА значение Fм угла магнитного склонения в районе полета ЛА, а также значения Е эксцентриситета и А большой полуоси референц-эллипсоида Земли и запоминают их в В. В процессе полета ЛА в момент времени То на ЛА определяют значения географических широты ГШо и долготы ГДо местоположения ЛА с помощью системы спутниковой навигации (ССН), измеряют значения магнитного курса (МК) Fо, высоты Н и модуля V вектора  скорости полета ЛА, вводят значения ГШо, ГДо, Н и V в В ЛА и запоминают их. С момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями МК, высоты и скорости, равными измеренным значениям Fо, Н и V. В момент времени Тк измеряют на ЛА приращение времени dT = Тк - То и определяют значения географических широты ГШк и долготы ГДк местоположения ЛА с помощью ССН, вводят значения dT, ГШк, ГДк в В ЛА, где с использованием значений Fм, Е, А, Fо, ГШо, ГДо, V, Н, dT, ГШк и ГДк вычисляют значения модуля U и угла Fв ориентации вектора
скорости полета ЛА, вводят значения ГШо, ГДо, Н и V в В ЛА и запоминают их. С момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями МК, высоты и скорости, равными измеренным значениям Fо, Н и V. В момент времени Тк измеряют на ЛА приращение времени dT = Тк - То и определяют значения географических широты ГШк и долготы ГДк местоположения ЛА с помощью ССН, вводят значения dT, ГШк, ГДк в В ЛА, где с использованием значений Fм, Е, А, Fо, ГШо, ГДо, V, Н, dT, ГШк и ГДк вычисляют значения модуля U и угла Fв ориентации вектора  скорости ветра относительно географического меридиана. Технический результат: определение скорости ветра в условиях дождя, тумана и сплошной облачности без использования радиотехнического излучения с ЛА, которое демаскирует его. 2 ил.
скорости ветра относительно географического меридиана. Технический результат: определение скорости ветра в условиях дождя, тумана и сплошной облачности без использования радиотехнического излучения с ЛА, которое демаскирует его. 2 ил.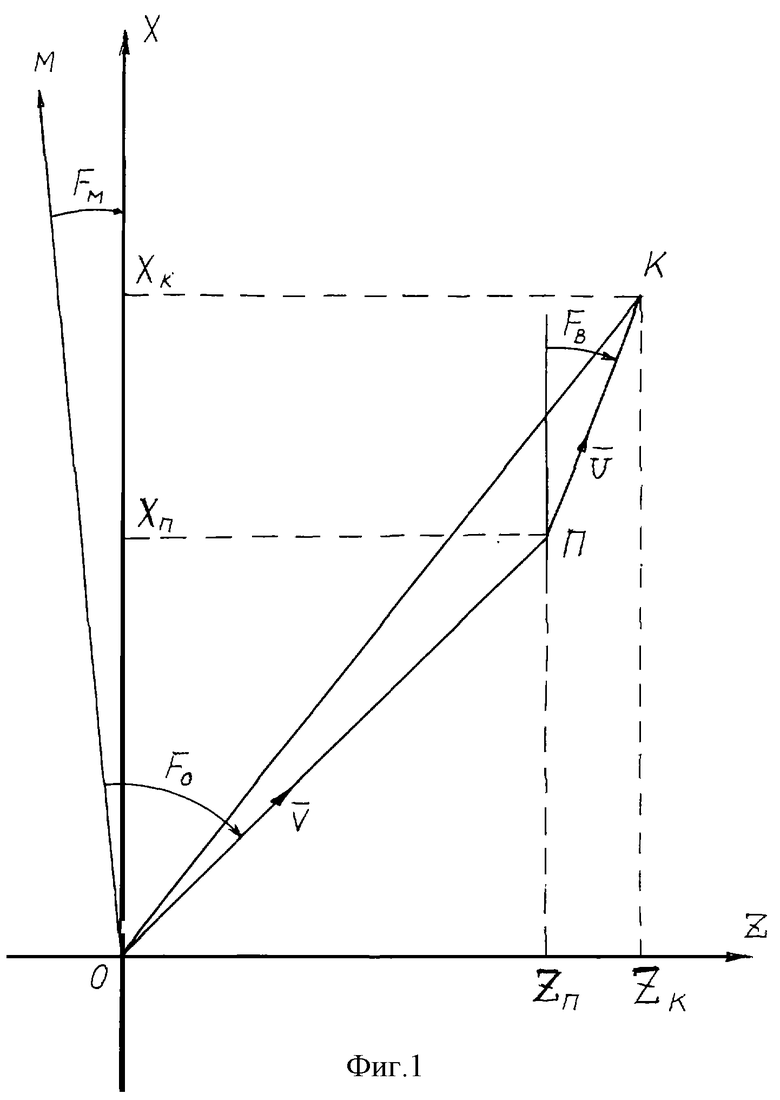
Способ определения скорости ветра, который состоит в том, что в процессе полета летательного аппарата (ЛА) в момент времени То измеряют на ЛА значения магнитного курса Fо, высоты Н и модуля V вектора  скорости его полета, вводят значение Н в вычислитель ЛА и запоминают в нем это значение, с момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fо, Н и V, в момент времени Тк>То измеряют на ЛА приращение времени dT=Тк-То, вводят значение dТ в вычислитель и значение модуля U вектора
скорости его полета, вводят значение Н в вычислитель ЛА и запоминают в нем это значение, с момента времени То до заданного момента времени Тк выполняют полет ЛА с постоянными значениями магнитного курса, высоты и скорости, равными измеренным значениям Fо, Н и V, в момент времени Тк>То измеряют на ЛА приращение времени dT=Тк-То, вводят значение dТ в вычислитель и значение модуля U вектора  скорости ветра вычисляют обратно пропорционально значению dT, отличающийся тем, что предварительно вводят в вычислитель значение Fм угла магнитного склонения в районе полета ЛА, а также значения Е эксцентриситета и А большой полуоси референц-эллипсоида Земли, запоминают эти значения в вычислителе, в процессе полета ЛА в момент времени То на нем определяют значения географических широты ГШо и долготы ГДо его местоположения с помощью системы спутниковой навигации, вводят значения ГШо, ГДо и V в вычислитель и запоминают в нем эти значения, в момент времени Тк определяют на ЛА значения географических широты ГШк и долготы ГДк его местоположения с помощью системы спутниковой навигации, вводят значения ГШк и ГДк в вычислитель, где с использованием значений Fм, Е, А, Fо, ГШо, ГДо, V, Н, dT, ГШк, ГДк вычисляют значения модуля U и угла Fв ориентации вектора
скорости ветра вычисляют обратно пропорционально значению dT, отличающийся тем, что предварительно вводят в вычислитель значение Fм угла магнитного склонения в районе полета ЛА, а также значения Е эксцентриситета и А большой полуоси референц-эллипсоида Земли, запоминают эти значения в вычислителе, в процессе полета ЛА в момент времени То на нем определяют значения географических широты ГШо и долготы ГДо его местоположения с помощью системы спутниковой навигации, вводят значения ГШо, ГДо и V в вычислитель и запоминают в нем эти значения, в момент времени Тк определяют на ЛА значения географических широты ГШк и долготы ГДк его местоположения с помощью системы спутниковой навигации, вводят значения ГШк и ГДк в вычислитель, где с использованием значений Fм, Е, А, Fо, ГШо, ГДо, V, Н, dT, ГШк, ГДк вычисляют значения модуля U и угла Fв ориентации вектора  скорости ветра относительно географического меридиана.
скорости ветра относительно географического меридиана.
| Б.П.АЛЕКСАНДРОВ и др | |||
| Авиационное вооружение | |||
| - М.: из-во ВВИА им | |||
| проф | |||
| Н.Е.Жуковского, 1971, с.388-390 | |||
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 1992 |
|
RU2017169C1 |
| Способ измерения скорости ветра | 1982 |
|
SU1101017A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ И СКОРОСТИ ВЕТРА | 1992 |
|
RU2101736C1 |
| УСТРОЙСТВО И СПОСОБ СБОРКИ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2759787C2 |
| US 4336606 А, 22.06.1982. | |||

