Изобретение относится к ближней радиолокации, в частности к импульсно-доплеровским информационно-измерительным системам, работающим в активном режиме. Изобретение может быть использовано в информационных радиолокационных системах для распознавания слабоконтрастных целей на фоне широкополосных и распределенных в пространстве помех.
Существующие в настоящее время автономные информационные системы (АИС) с импульсной модуляцией по периодическому закону [1] обладают существенным недостатком, выражающимся в пространственной периодичности функции селекции (ФС) по дальности. Периодичность ФС приводит к тому, что постановка активных или пассивных помех с расстояний, превышающих рабочую дальность АИС, снижает отношение сигнал/шум на входе тракта принятия решения и может вызывать ложные срабатывания АИС.
Известно устройство - радиолокационная станция по патенту РФ № 2083995 G 01 S 13/42, опубл. 24.10.97 г., которое содержит последовательно соединенные синхронизатор, блок перестройки частоты, возбудитель, фазовый манипулятор, усилитель мощности, антенный переключатель и антенну, последовательно соединенные усилитель высокой частоты, смеситель, усилитель промежуточной частоты, блок фазовых детекторов, а также генератор кодов и импульсный модулятор, причем вход усилителя высокой частоты подключен к третьему плечу антенного переключателя, генератор кодов и импульсный модулятор соединены с управляющими входами фазового манипулятора и усилителя мощности соответственно, выход гетеродинной частоты возбудителя соединен с гетеродинным входом смесителя, а выход опорной частоты возбудителя - со входом опорной частоты.
Устройство построено по когерентно-импульсному принципу и допускает перестройку несущей частоты от импульса к импульсу по произвольному закону, используя сигналы с внутриимпульсной фазовой манипуляцией.
В радиолокационной станции осуществляется проверка наличия прицельных помех на несущей частоте в данном периоде повторения, в процессе перестройки частоты от периода к периоду выявление одной или нескольких частот, свободных от прицельных помех, работа на одной из этих частот в когерентном режиме с разрешением по доплеровским частотам, измерение ширины спектра межпериодных флюктуаций комплексной амплитуды отраженных сигналов и селекция сигналов от пассивных помех вида облако дипольных отражателей по ширине спектра межпериодных флюктуаций.
Недостатки рассмотренного устройства заключаются в больших длительностях излучаемых импульсов (для разрешения объектов по Доплеру) и интервалах времени принятия решения; применение устройства ограничено областью дальней локации, когда величина периода повторения излучаемых импульсов определяется максимально возможной дальностью до цели; не поставлена и не решена проблема обеспечения непериодичности функции селекции, что приводит к неоднозначности определения дальности до цели; не обеспечено высокое быстродействие системы (единицы миллисекунд на принятие решения) для применения в ближней локации.
Наиболее близким по технической сущности устройством является когерентно-импульсная доплеровская АИС ([1], с.52), выбранная за прототип и включающая последовательно соединенные задающий генератор, усилитель мощности, переключатель “прием-передача” и антенну, последовательно включенные детектор, фильтр доплеровской частоты, усилитель и индикатор, выполняющий функцию анализатора, а также модулятор, один из выходов которого соединен с усилителем мощности, а второй - с детектором, к гетеродинному входу которого подсоединен выход задающего генератора. Генератор высокой частоты устройства работает в импульсном режиме. Модулятор попеременно включает то передатчик, то приемник на равное время, поэтому передатчик излучает импульсы длительностью, равной половине периода повторения. Фильтр доплеровской частоты выделяет сигналы от движущихся целей, соответствующие возможным значениям их радиальных скоростей.
Недостатки прототипа заключаются в неоднозначности определения дальности до цели и высокой вероятности ложных тревог при наличии распределенных в пространстве широкополосных помех за пределами рабочей дальности, являющиеся следствием периодичности функции селекции.
Сущностью изобретения является когерентно-импульсный радиолокатор с комбинированной частотной модуляцией периодическим и шумовым процессами и регрессионным или нейросетевым трактом обработки, который селектирует сигналы по относительной ширине полосы энергетического спектра на частоте Доплера.
Достигаемый технический результат заключается в обеспечении возможности АИС распознавания радиолокационных слабоконтрастных объектов на фоне искусственных и естественных широкополосных распределенных пространственных помех и обеспечении высокой помехоустойчивости АИС за пределами рабочей дальности.
Сопоставительный анализ с прототипом показывает, что предложенное устройство отличается наличием новых элементов: генератора шума в импульсной гетеродинной системе, последовательно соединенного с автогенератором и регрессионного или нейросетевого тракта в качестве анализатора, что обеспечит у рассматриваемого радиолокатора принципиальное отсутствие мертвых зон и устранит периодичность функции селекции. Следовательно, устройство удовлетворяет критерию “новизна”.
Сравнение с другими техническими решениями показывает, что повышена защита АИС от ложных срабатываний по искусственным и естественным широкополосным и распределенным в пространстве помехам за пределами рабочей дальности. Это позволяет сделать вывод о соответствии предложенного решения критерию “изобретательский уровень”.
Изобретение поясняется следующими чертежами:
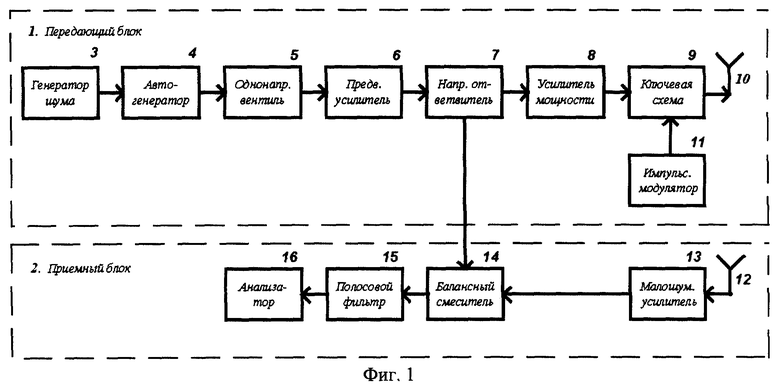
фиг.1 - структурная схема когерентно-импульсного радиолокатора с комбинированной шумовой модуляцией;
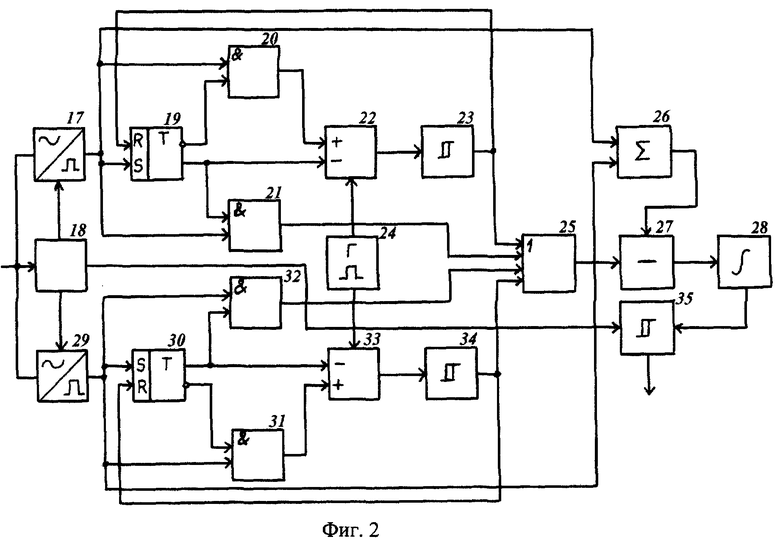
фиг.2 - структурная схема дискретно-аналоговой регрессионной системы, реализующей распознавание доплеровских сигналов по относительной полосе;
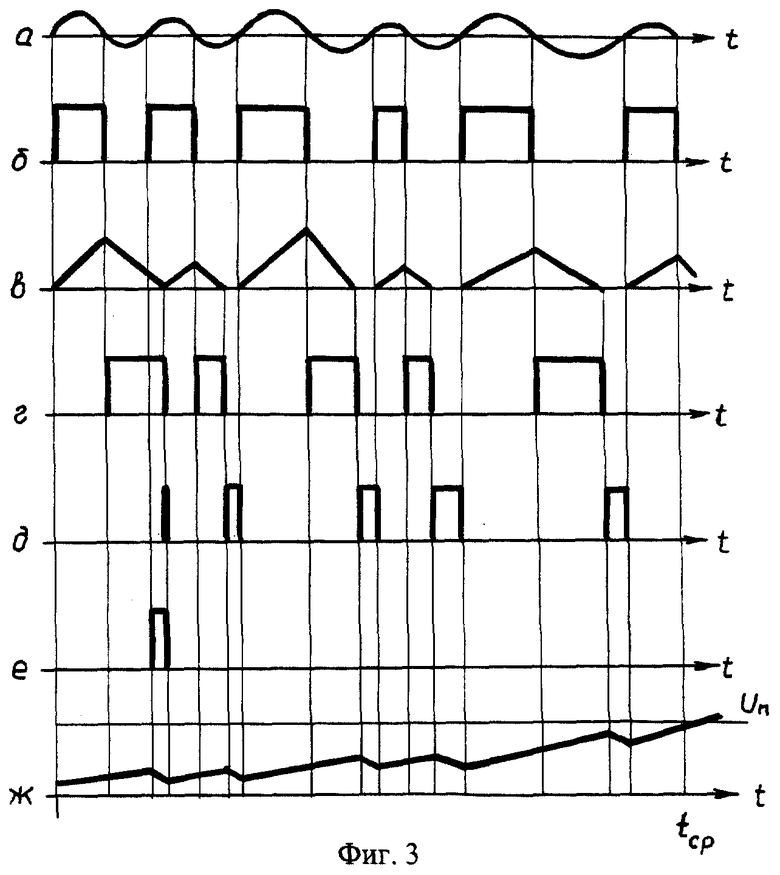
фиг.3 - временные диаграммы, поясняющие работу одного канала схемы фиг.2;
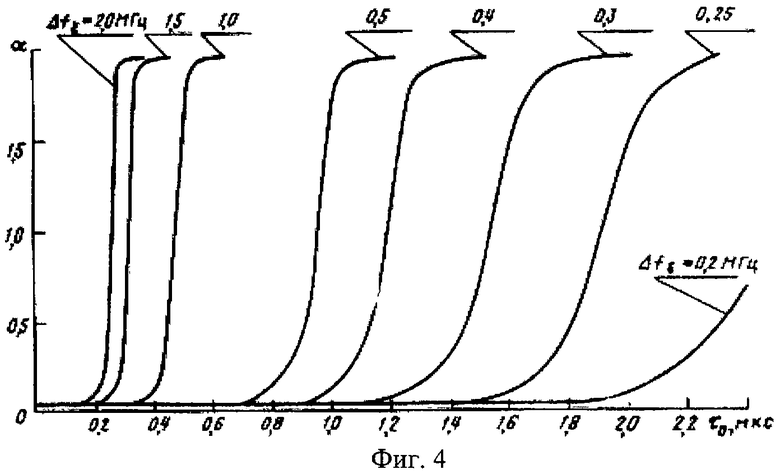
фиг.4 - зависимость относительной ширины полосы энергетического спектра от времени задержки сигнала при различной девиации частоты шумовой ЧМ;
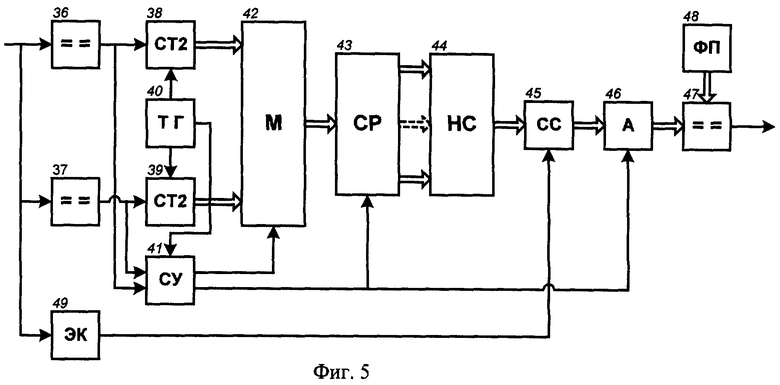
фиг.5 - структурная схема варианта цифровой нейросетевой системы, реализующей распознавание доплеровских сигналов по относительной ширине полосы энергетического спектра;
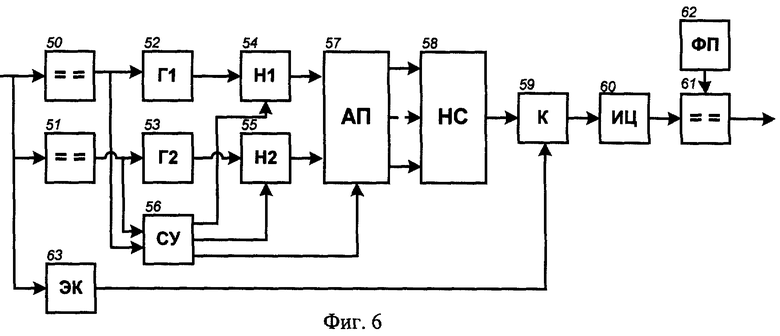
фиг.6 - структурная схема варианта дискретно-аналоговой нейросетевой системы, реализующей распознавание доплеровских сигналов по относительной ширине полосы энергетического спектра.
Когерентно-импульсный радиолокатор состоит из передающего 1 и приемного блока 2 (фиг.1). Передающий блок содержит последовательно соединенные генератор шума 3, автогенератор 4, однонаправленный вентиль 5, предварительный усилитель 6, направленный ответвитель 7, усилитель мощности 8, ключевую схему 9 и передающую антенну 10, а также импульсный модулятор 11, соединенный с ключевой схемой 9.
Приемный блок 2 состоит из последовательно соединенных приемной антенны 12, малошумящего усилителя 13, балансного смесителя 14, полосового фильтра (доплеровских частот) 15 и анализатора 16, причем к гетеродинному входу балансного смесителя 14 подсоединено второе плечо направленного ответвителя 7 передающего блока 1.
Один из вариантов реализации анализатора 16 является дискретно-аналоговая регрессионная система с широтно-импульсной модуляцией (фиг.2), описанная в [2], с.83 и анализирующая относительную ширину полосы спектра доплеровского сигнала по распределению интервалов между нулями. Анализатор состоит из двух идентичных каналов обработки интервалов между нулями, работающих поочередно, а также канала энергетической оценки 18, причем первый канал обрабатывает положительные полупериоды доплеровского сигнала, а второй - отрицательные.
Первый канал содержит последовательно соединенные компаратор 17, ко входу которого подсоединен энергетический канал 18 и блоки управления реверсивным накопителем 19, 20, формирователь импульсов ошибки 21, ко входам которого подсоединены прямой выход блока управления 19 и компаратор 17. В канал также входят последовательно соединенные реверсивный накопитель 22 и нуль-орган 23. Генератор 24, сумматор импульсов ошибки 25, формирователь доверительного интервала 26, вычитающее устройство 27 и накопитель 28 входят в оба канала. Второй канал содержит компаратор 29, блоки управления реверсивным накопителем 30, 31, формирователь импульсов ошибки 32, реверсивный накопитель 33, к которому подсоединен генератор 24 и нуль-орган 34, совместно с нуль-органом 24 первого канала подсоединенный к сумматору импульсов ошибки 25, к которому также подсоединены формирователи импульсов ошибки 21 и 32 обоих каналов. Генератор 24 соединен с реверсивными накопителями 22, 33 первого и второго каналов соответственно, выходы компараторов 17 и 29 соединены со входами формирователя доверительного интервала 26, выход которого соединен с вычитающим устройством 27. Сумматор импульсов ошибки 25, вычитающее устройство 27 и накопитель 28 соединены последовательно.
Выходной сигнал анализатора снимается с выхода порогового устройства 35, ко входам которого подсоединены канал энергетической оценки 18 и накопитель 28.
Радиолокатор работает следующим образом.
Автогенератор 4 передающего блока 1, управляемый по напряжению генератором шума 3, вырабатывает гармонический сигнал с центральной частотой ω0 и девиацией Δωξ.
При условии  , где ωmax - максимальная частота спектра модулирующей функции, шумовая ЧМ является широкополосной, и спектр модулированного колебания описывается функцией Гаусса.
, где ωmax - максимальная частота спектра модулирующей функции, шумовая ЧМ является широкополосной, и спектр модулированного колебания описывается функцией Гаусса.
Высокочастотный сигнал через однонаправленный вентиль 5, устраняющий влияние последующих блоков на автогенератор 4, подается на предварительный усилитель 6, нагруженный на направленный ответвитель 7, предназначенный для отвода части мощности передатчика в приемный блок 2. С первого плеча направленного ответвителя 7 сигнал поступает на усилитель мощности 8, где усиливается и через ключевую схему 9, которая управляется импульсным модулятором 11, поступает на передающую антенну 10. Импульсный модулятор 11 предназначен для модуляции непрерывного сигнала периодическим импульсным процессом с малой скважностью.
Сигнал, отраженный от цели, с приемной антенны 12 приемного блока 2 усиливается малошумящим усилителем 13 и в балансном смесителе 14 перемножается с несущей, снятой со второго плеча направленного ответвителя 7 передающего блока 1, после чего подвергается фильтрации полосовым фильтром 15. С выхода фильтра снимается доплеровская составляющая отраженного сигнала, частота которой определяется выражением:

где  время задержки принимаемого сигнала; R0 - расстояние до ретранслятора; ΔR - изменение расстояния до ретранслятора за время τ.
время задержки принимаемого сигнала; R0 - расстояние до ретранслятора; ΔR - изменение расстояния до ретранслятора за время τ.
Анализатор 16 по признаку относительной ширины полосы энергетического спектра доплеровского сигнала, снятого с фильтра 15, вырабатывает решение о наличии полезного сигнала от цели в области обзора радиолокатора.
Результаты экспериментальных исследований показали, что в ближней локации при наличии у цели блестящих точек и использовании узких диаграмм направленности относительная полоса энергетического спектра доплеровского сигнала αц<0,3; для помехи: αп>1.
Относительная ширина полосы энергетического спектра доплеровского сигнала, определяемая как  (где Δωд - эффективная ширина полосы спектра доплеровского сигнала) определяется выражением:
(где Δωд - эффективная ширина полосы спектра доплеровского сигнала) определяется выражением:

Результаты расчета зависимости относительной ширины полосы энергетического спектра α от девиации частоты шумовой ЧМ Δfξ и времени задержки τ0 приведены на фиг.4. Расчеты проводились для диапазона доплеровских частот Δfд=5...100 кГц. Анализ графиков показывает резкое увеличение значений относительной ширины полосы α при постоянной девиации шумовой ЧМ Δfξ и изменении дальности до ретранслятора R0, начиная со значений

Следовательно, при выборе полосы шумового процесса в соответствии с (2) существует возможность формирования ФС, обеспечивающей селекцию помехи по относительной ширине полосы энергетического спектра.
Применение регрессионного [2] или нейросетевого трактов распознавания сигналов доплеровского сигнала по относительной ширине полосы энергетического спектра входной реализации позволяет обнаруживать узкополосный (αц<0,3) доплеровский сигнал на фоне широкополосной помехи с  до отношений сигнал/помеха в полосе Доплера, равных единице [2]. Регрессионные системы обеспечивают инвариантность рабочих характеристик к средней частоте энергетического спектра и дисперсии процессов на входе, не требуют времени на адаптацию (на слежение за задержкой сигнала), позволяют сократить время на обработку и обрабатывать нестационарные случайные процессы. Помеха на частоте Доплера произвольной мощности при относительной ширине полосы α≥1 не вызывает ложных срабатываний в системе при обработке не менее 20 интервалов между нулями входной реализации.
до отношений сигнал/помеха в полосе Доплера, равных единице [2]. Регрессионные системы обеспечивают инвариантность рабочих характеристик к средней частоте энергетического спектра и дисперсии процессов на входе, не требуют времени на адаптацию (на слежение за задержкой сигнала), позволяют сократить время на обработку и обрабатывать нестационарные случайные процессы. Помеха на частоте Доплера произвольной мощности при относительной ширине полосы α≥1 не вызывает ложных срабатываний в системе при обработке не менее 20 интервалов между нулями входной реализации.
Задаваясь пороговым значением по относительной полосе αn=0,3, на основании требований обеспечения помехоустойчивости АИС в пределах рабочих дальностей при работе на фоне распределенных пространственных и ретрансляционных помех из (1) и фиг.4 может быть определено значение девиации частоты шумовой ЧМ. Преимуществом предлагаемого способа формирования ФС является малая девиация шумовой ЧМ (для рабочих дальностей от 0 до 15 метров Δfξ=5 мГц), что не вызывает дополнительного возрастания сигналов паразитной амплитудной модуляции.
На фиг.3 приведены временные диаграммы, поясняющие работу одного канала анализатора 16.
Входной сигнал анализатора изображен на фиг.3а. На выходе компаратора 17 происходит функциональное преобразование вида:
где U0 - амплитуда сигнала на выходе компаратора; UП0 - порог срабатывания компаратора (фиг.3б).
При  (где σс - дисперсия сигнала на выходе) с достаточной точностью можно считать, что длительности импульсов на выходе компаратора 17 равны соответствующим интервалам между нулями входной реализации. С началом положительного полупериода реализации сигнала блоки управления 19, 20 включают реверсивный накопитель 2, и последний начинает заполняться (фиг 3в). При переходе через нуль входной реализации изменяется направление заполнения реверсивного накопителя 22. В момент его обнуления нуль-орган 23 формирует импульс, который поступает на сумматор ошибки 25, сюда же поступают импульсы (фиг.3г) с формирователя 21. Если длительность предыдущего полупериода больше последующего, сумматор ошибки 25 формирует импульсную последовательность (фиг.3е), в противном случае формируется последовательность (фиг.3д). Импульсы ошибки через преобразователь уровня поступают на вход вычитающего устройства 27. Если генератор 24 представляет собой генератор тактовых импульсов, то при заполнении реверсивного накопителя для двух соседних интервалов между нулями τi и τi+1 тактовые частоты равны f и
(где σс - дисперсия сигнала на выходе) с достаточной точностью можно считать, что длительности импульсов на выходе компаратора 17 равны соответствующим интервалам между нулями входной реализации. С началом положительного полупериода реализации сигнала блоки управления 19, 20 включают реверсивный накопитель 2, и последний начинает заполняться (фиг 3в). При переходе через нуль входной реализации изменяется направление заполнения реверсивного накопителя 22. В момент его обнуления нуль-орган 23 формирует импульс, который поступает на сумматор ошибки 25, сюда же поступают импульсы (фиг.3г) с формирователя 21. Если длительность предыдущего полупериода больше последующего, сумматор ошибки 25 формирует импульсную последовательность (фиг.3е), в противном случае формируется последовательность (фиг.3д). Импульсы ошибки через преобразователь уровня поступают на вход вычитающего устройства 27. Если генератор 24 представляет собой генератор тактовых импульсов, то при заполнении реверсивного накопителя для двух соседних интервалов между нулями τi и τi+1 тактовые частоты равны f и  f соответственно (здесь
f соответственно (здесь  - коэффициент начальной множественной регрессии i-го интервала на i+1-й). Если генератор 24 представляет собой источник тока, то при заполнении реверсивного накопителя 22 токи для интервалов между нулями τi и τi+1 будут равны I и
- коэффициент начальной множественной регрессии i-го интервала на i+1-й). Если генератор 24 представляет собой источник тока, то при заполнении реверсивного накопителя 22 токи для интервалов между нулями τi и τi+1 будут равны I и  I соответственно. При этом длительность импульса последовательности ξ(t) на выходе устройства 25 будет равна модулю ошибки регрессионного представления интервалов между нулями.
I соответственно. При этом длительность импульса последовательности ξ(t) на выходе устройства 25 будет равна модулю ошибки регрессионного представления интервалов между нулями.
Второй канал схемы работает по отрицательным полупериодам. С выходов компараторов 17, 29 через сумматор 26 на вход вычитающего устройства 27 поступает единичный сигнал 1 (t). Включение компараторов 17, 29 и порогового устройства 35 осуществляется сигналами с выхода энергетического канала (с сумматора ошибки 25), предотвращающего срабатывание системы по внутренним шумам. При превышении сигналом (фиг.3ж) с выхода накопителя 28 порога срабатывания порогового устройства 35 и при срабатывании энергетического канала происходит срабатывание системы.
Другим вариантом реализации анализатора 16 является цифровая нейросетевая система, анализирующая относительную ширину полосы энергетического спектра доплеровского сигнала по распределению интервалам между нулями (фиг.5). Анализатор состоит из временного канала и канала энергетической оценки.
Временной канал содержит два плеча, образованных аналоговыми компараторами нуля 36, 37, соединенными последовательно с двоичными счетчиками 38 и 39 соответственно, к тактовым входам которых подсоединен тактовый генератор 40, выход которого также подсоединен к схеме управления 41. Выходы счетчиков 38, 39 последовательно соединены с мультиплексором 42, выход данных которого соединен со сдвиговым регистром 43, а управляющий вход - со схемой управления 41. В канал также входят последовательно соединенные нейросетевая схема 44, схема совпадения 45, аккумулятор 46 и цифровой компаратор 47, к входу опорных данных которого подсоединен формирователь порога 48. Схема управления 41 соединена со сдвиговым регистром 43 и аккумулятором 46.
Выход энергетического канал 49 соединен с управляющим входом схемы совпадения 45. Выходной сигнал анализатора снимается с цифрового компаратора 47. Анализатор работает следующим образом.
На выходах компараторов 36, 37 происходят функциональные преобразования соответственно:

где U0 - амплитуда логического сигнала на выходе компаратора; UП1, UП2 - пороги срабатывания компараторов.
При  (где σc - дисперсия сигнала на выходе) с достаточной точностью можно считать, что длительности импульсов на выходе компараторов 36, 37 равны длительностям положительных и отрицательных полупериодов входной реализации.
(где σc - дисперсия сигнала на выходе) с достаточной точностью можно считать, что длительности импульсов на выходе компараторов 36, 37 равны длительностям положительных и отрицательных полупериодов входной реализации.
При положительном полупериоде запускается двоичный счетчик 38, работающий синхронно с импульсами тактового генератора 40; после окончания счета схема управления 41, синхронизированная импульсами тактового генератора 40, подключает выход счетчика 38 через мультиплексор 42 к входу сдвигового регистра 43. При отрицательном полупериоде производятся аналогичные операции, но данные на вход сдвигового регистра 43 поступают со счетчика 39. Данные, соответствующие длительностям последовательных полупериодов с выходов сдвигового регистра 43 параллельно подаются в нейросетевую схему 44, на выходе которой формируется цифровой код, который, пройдя через схему совпадения 45, накапливается в аккумуляторе 46. Цифровой компаратор 47 сравнивает выходные данные аккумулятора 46 с данными, поступающими с формирователя порога 48, и вырабатывает решение о величине относительной ширины полосы энергетического спектра входного доплеровского сигнала. Энергетический канал 49 разрешает передачу данных из нейросетевой схемы 44 в аккумулятор 46 через схему совпадения 45.
Другим вариантом реализации анализатора 16 является дискретно-аналоговая нейросетевая система, анализирующая относительную ширину полосы энергетического спектра доплеровского сигнала по распределению интервалов между нулями и состоящая из временного канала и энергетического канала (фиг.6).
Временной канал содержит два идентичных плеча, образованных последовательно соединенными аналоговыми компараторами нуля 50, 51, генераторами линейно нарастающего напряжения 52, 53 и накопителями со сбросом 54, 55 соответственно. В канал также входят последовательно соединенные аналоговый переключатель 57, нейросетевая схема 58, ключ 59, интегрирующая цепь 60 и компаратор 61, к опорному входу которого подсоединен формирователь порога 62; к накопителям со сбросом 54, 55 и аналоговому переключателю 57 подсоединена схема управления 56, ко входам которой подсоединены выходы компараторов нудя 50, 51.
Выход энергетического канала 63 соединен с управляющим входом ключа 59. Выходной сигнал анализатора снимается с компаратора 61.
Анализатор работает следующим образом. На выходах компараторов 50, 51 происходят функциональные преобразования (3).
При положительном полупериоде запускается генератор линейно нарастающего напряжения 52, при отрицательном - генератор линейно нарастающего напряжения 53. Напряжения на выходах генераторов, пропорциональные длительностям положительного и отрицательного полупериодов, в моменты перехода входного доплеровского сигнала через пороговые уровни UП1, UП2 снимаются с выходов накопителей со сбросом 54, 55 соответственно. Управляемый схемой управления 56 аналоговый переключатель 57 передает напряжение с выходов накопителей со сбросом 54, 55 на нейросетевую схему 58. На выходе нейросетевой схемы 58 формируется сигнал решения, который, пройдя через ключ 59, накапливается интегрирующей цепью 60. После окончания полного периода сигнала схема управления 56 обнуляет напряжение на выходах накопителей со сбросом 54, 55 и цикл работы устройства повторяется. Компаратор 61 сравнивает сигнал интегрирующей цепи 59 с уровнем, задаваемым формирователем порога 62 и вырабатывает решение о величине относительной ширины полосы энергетического спектра входного доплеровского сигнала. Энергетический канал 63 посредством ключа 59 разрешает передачу сигнала из нейросетевой схемы 58 в интегрирующую цепь 60.
Обработка входной информации нейросетевой схемой 58 производится по стандартному алгоритму, описанному в [3], стр. 50.
На практике показано, что разделимость доплеровских сигналов по признаку относительной ширины полосы энергетического спектра в АИС обусловливает решение задачи распознавания при помощи двухслойной нейронной сети, описываемой моделью:

где Y - выходной вектор нейросети; Х - входной вектор (признаков); W1, W2 - матицы весовых коэффициентов первого и второго слоя соответственно; П0, П1, - векторы порогов первого и второго слоя нейросети соответственно; F1, F2 - активационные функции первого и второго слоя соответственно.
При пороговом значении по относительной ширине полосы энергетического спектра αn=0,3 для работы в диапазоне доплеровских частот 1...100 кГц получены следующие примерные параметры нейронной сети: входные величины - длительности интервалов между нулями в секундах, умноженные на масштабный коэффициент 0,2·106; размерность входного вектора Х n=2; количество нейронов в первом слое N1=2; количество нейронов во втором слое N2=1; активационные функции - ступенчатые:
значения весовых коэффициентов  W2=(7,8563; 8,0216)Т; значения порогов П1=(0;0)Т; П2=-7,1156.
W2=(7,8563; 8,0216)Т; значения порогов П1=(0;0)Т; П2=-7,1156.
В результате работы алгоритма (4) при подаче на вход дискретно-аналоговой нейросетевой системы не менее 20 значений, соответствующих длительностям последовательных интервалов между нулями входного сигнала, на выходе формируется решение о величине относительной ширины полосы его энергетического спектра.
Одним из вариантов реализации нейросетевой схемы 58, работающей по алгоритму (3) может, например, быть устройство, состоящее из идентичных по структуре и соединенных между собой блоков, каждый из которых включает усилитель-ограничитель, построенный по любой стандартной схеме, резистивный весовой делитель и источник опорного напряжения, причем последний подключен к одному из входов делителя, выход которого соединен со входом усилителя-ограничителя.
Нейросетевые системы, также как и регрессионные, обеспечивают инвариантность рабочих характеристик к средней частоте энергетического спектра и дисперсии процессов на входе, не требуют времени на адаптацию, позволяют сократить время на обработку и обрабатывать нестационарные случайные процессы.
В результате существенно расширяются условия применения радиолокатора на фоне активных и пассивных помех за пределами рабочей дальности, и значительно повышается эффективность действия АИС.
Источники информации
1. Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. - М.: Радио и связь, 1986. - 288 с.
2. Мусьяков М.П., Хохлов В.К. Регрессионные системы обнаружения и распознавания случайных сигналов в ближней локации. - М.: ЦНИИНТИКПК, 1988. - 171 с.
3. Осовский С. Нейронные сети для обработки информации. - М.: Финансы и статистика, 2002. - 344 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЛИЖНЕЙ ЛОКАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2535302C1 |
| РАДИОЛОКАЦИОННЫЙ ФИКСАТОР ДАЛЬНОСТИ С КОМБИНИРОВАННОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ И ПРЕДЕЛЬНОЙ РЕГРЕССИОННОЙ ОБРАБОТКОЙ | 2012 |
|
RU2508557C1 |
| НЕЙРОСЕТЕВАЯ АДАПТИВНАЯ СИСТЕМА РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ АКУСТИЧЕСКИМ ИЗЛУЧЕНИЯМ | 2013 |
|
RU2513719C1 |
| РАДИОЛОКАЦИОННЫЙ ПЕЛЕНГАТОР ЛОКАЛИЗОВАННЫХ ОБЪЕКТОВ | 2014 |
|
RU2580830C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ МЕСТОПОЛОЖЕНИЯ ЗАПРЕГРАДНОГО ОБЪЕКТА | 2014 |
|
RU2580828C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| РАДИОЛУЧЕВОЙ ДАТЧИК ОХРАННОЙ СИГНАЛИЗАЦИИ | 2013 |
|
RU2554526C1 |
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при воздействии по основному лепестку диаграммы направленности антенны помехи типа DRFM | 2019 |
|
RU2724116C1 |
Изобретение относится к ближней радиолокации, в частности к импульсно-доплеровским информационно-измерительным системам, работающим в активном режиме. Технический результат заключается в обеспечении возможности автономных информационных систем (АИС) распознавания радиолокационных слабоконтрастных средств на фоне искусственных и естественных широкополосных распределенных помех и обеспечении высокой помехоустойчивости АИС за пределами рабочей дальности. Технический результат достигается благодаря тому, что когерентно-импульсный радиолокатор содержит передающий блок, включающий последовательно соединенные генератор шума, автогенератор, однонаправленный вентиль, предварительный усилитель, направленный ответвитель, усилитель мощности, ключевую схему и передающую антенну, а также содержит импульсный модулятор, подключенный к ключевой схеме. Приемный блок содержит последовательно соединенные приемную антенну, малошумящий усилитель, балансный смеситель, полосовой фильтр и анализатор, причем к балансному смесителю также подключен направленный ответвитель передающего блока, а в приемном блоке в качестве анализатора включен регрессионный или неиросетевои тракт. 6 ил.
Когерентно-импульсный радиолокатор, содержащий передающий блок, включающий последовательно соединенные усилитель мощности, ключевую схему и передающую антенну, а также импульсный модулятор, соединенный с управляющим входом ключевой схемы, и приемный блок, содержащий приемную антенну и последовательно соединенные полосовой фильтр и анализатор, отличающийся тем, что передающий блок содержит последовательно соединенные генератор шума, автогенератор, однонаправленный вентиль, предварительный усилитель и направленный ответвитель, причем с первого плеча направленного ответвителя сигнал поступает на усилитель мощности, а приемный блок содержит последовательно соединенные малошумящий усилитель и балансный смеситель, последовательно соединенный с полосовым фильтром, а приемная антенна последовательно соединена с малошумящим усилителем, причем к гетеродинному входу балансного смесителя подсоединено второе плечо направленного ответвителя передающего блока, а в приемном блоке в качестве анализатора включен регрессионный или нейросетевой тракт.
| БАКУЛЕВ П.А., СТЕПИН В.М | |||
| Методы и устройства селекции движущихся целей | |||
| - М.: Радио и связь, 1986, с.52-54 | |||
| ПРИЕМНО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2037840C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |
| Устройство для определения дальности и скорости объекта | 1979 |
|
SU820430A1 |
| Пневмоимпульсное устройство для обрушения сводов материала в бункерах | 1988 |
|
SU1597329A1 |
| 1971 |
|
SU417939A3 | |

