Изобретение относится к рельсовым транспортным средствам и непосредственно касается тяговых приводов локомотивов.
Известен частотно-управляемый асинхронный электропривод (Пат. 2100898 РФ. Частотно-управляемый асинхронный электропривод / В.И.Воробьев, А.И.Ивахин, А.И.Власов и др.), содержащий электродвигатель с основной круговой и пусковой дуговой обмотками статора, датчик скорости электродвигателя и систему регулирования, включающую статический преобразователь частоты с автономным инвертором, коммутатор обмоток и блок управления преобразователем с обратной связью по датчику скорости, при этом коммутатор обмоток электрически связан со статическим преобразователем частоты, основной круговой и пусковой дуговой обмотками и блоком управления преобразователем.
К недостаткам этого технического решения относится широкий диапазон регулирования частоты напряжения питания электродвигателя, главным образом обусловленный соотношением центральных углов дуговой и круговой обмоток. Это вызывает значительное число циклов переходных коммутационных процессов в силовых элементах преобразователя в верхней области частотного диапазона.
Техническим результатом изобретения является ограничение диапазона регулирования частоты напряжения питания электродвигателя, что приводит к повышению его надежности.
Технический результат достигается тем, что в электроприводе, содержащем электродвигатель с основной круговой и пусковой дуговой обмотками статора, датчик скорости электродвигателя и систему регулирования, состоящую из статического преобразователя частоты с автономным инвертором, блока управления преобразователем с обратной связью по датчику скорости и коммутатора обмоток, электрически связанного со статическим преобразователем частоты, основной круговой и пусковой дуговой обмотками и блоком управления преобразователем, электродвигатель обеспечен дополнительными дуговыми обмотками, подключенными к коммутатору. При этом диапазон частотного регулирования электродвигателя определяется общим числом, центральными углами и числами пар полюсов обмоток статора.
Сущность изобретения поясняется чертежом.
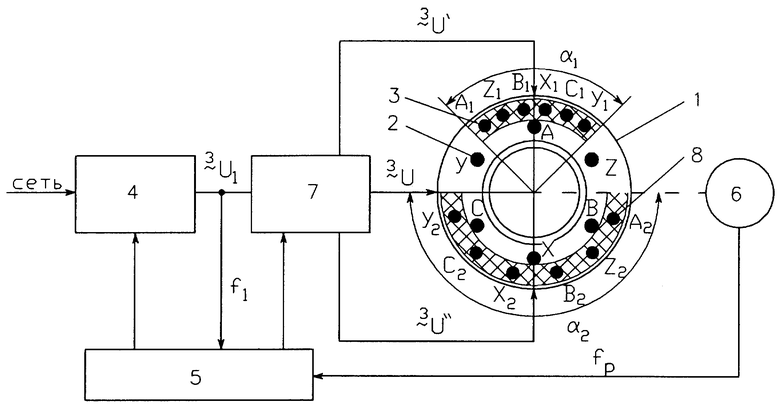
Электропривод содержит электродвигатель 1 с основной круговой 2 и пусковой дуговой 3 обмотками статора, систему регулирования, которая содержит статический преобразователь частоты 4 с автономным инвертором (не показан), блок управления 5 преобразователем с обратной связью по датчику скорости 6 электродвигателя 1 и коммутатор 7 обмоток, электрически связанный со статическим преобразователем 4, основной круговой 2 и пусковой дуговой 3 обмотками и блоком управления 5 преобразователем.
В электроприводе электродвигатель 1 обеспечен дополнительными дуговыми обмотками 8 (в качестве примера на чертеже изображен электропривод с одной дополнительной дуговой обмоткой), подключенными к коммутатору 7. Общее число обмоток статора, их центральные углы и числа пар полюсов определяют требуемый диапазон частотного регулирования электродвигателя.
Электропривод работает следующим образом.
При пуске к статическому преобразователю частоты 4 посредством коммутатора 7 подключена пусковая дуговая обмотка 3 статора двигателя 1 с центральным углом α1<2π. Пусковая частота питающего напряжения дуговой обмотки имеет повышенное по отношению к эквивалентной пусковой частоте круговой обмотки значение и определяется выражением
где f1П° - пусковая частота напряжения питания круговой обмотки, соответствующая требуемому пусковому моменту электродвигателя; рα1 и р° - соответственно число пар полюсов для пусковой дуговой и круговой обмоток.
При соответствующих α1 и рα1 получается значение f1α1, обеспечивающее требуемый уровень снижения пульсации вращающего момента в режиме пуска.
Разгон двигателя осуществляется частотным регулированием. При этом система регулирования посредством блока управления 5 преобразователем частоты 4 формирует сигналы управления инвертором по алгоритму с однократной на периоде коммутацией силовых элементов. Когда скорость вращения вала электродвигателя достигнет значения, соответствующего частоте напряжения
где α2(α2>α1) и рα2 - центральный угол и число пар полюсов дополнительной дуговой обмотки статора, коммутатор 7 подключает к преобразователю частоты 4 дополнительную дуговую обмотку 8, а система регулирования обеспечивает формирование на выходе статического преобразователя 4 частоту f1α2 ≥ f1α1. Момент переключения обмоток определяется системой регулирования путем сравнения частоты f1 напряжения на выходе преобразователя 4 и частоты вращения вала двигателя fp, сигнал по которой поступает с датчика скорости 6 электродвигателя.
При достижении скорости вращения вала электродвигателя, соответствующей частоте напряжения
коммутатор 7 подключает к преобразователю частоты 4 основную круговую обмотку 2 статора, а система регулирования аналогично формирует на выходе статического преобразователя 4 частоту f1°≥f1α2, чем обеспечивается дальнейшее увеличение скорости вращения вала двигателя.
Соответствующим подбором α1, α2, pα1, pα2 и p° достигается уменьшение диапазона частотного регулирования двигателя, т.к.
Большее ограничение частотного диапазона обеспечивается снабжением электродвигателя несколькими дополнительными дуговыми обмотками.
Для реализации строго определенного диапазона частотного регулирования электродвигателя необходимо соблюдать условие, в общем виде представленное выражением
где αn, pn и αn-1, pn-1 - центральный угол и число пар полюсов соответственно включаемой и отключаемой обмоток, при этом 0<αn ≤ 2π.
В рассматриваемом случае диапазон регулирования частоты напряжения для всех обмоток составляет

Таким способом из частотного диапазона питающего напряжения исключаются низкие частоты и соответственно снижается пульсация вращающего момента двигателя, а также ограничивается верхняя область диапазона частотного регулирования электродвигателя.
Технико-экономическая эффективность изобретения в сравнении с прототипом заключается в том, что функционирование электропривода с переключением пусковой дуговой обмотки на дополнительные дуговые и круговую обмотку позволяет ограничить верхнюю область частотного диапазона напряжения двигателя и, следовательно, сократить число циклов коммутационных переходных процессов в силовых элементах статического преобразователя. Это повышает надежность электропривода.
С целью исследования характеристик предложенного электропривода были проведены его испытания. В качестве объекта испытаний исследовались модель дугостаторного асинхронного двигателя с тремя значениями активных углов обмоток статора. Испытания проводились в лаборатории кафедры “Локомотивы” Брянского государственного технического университета на экспериментальной установке, содержащей синхронный генератор, с системой автоматического регулирования; статический преобразователь частоты с двумя типами автономных инверторов; систему управления преобразователем с тремя законами управления и обратную связь по частоте вращения двигателя.
В процессе испытаний регистрировались частота напряжения питания f1 двигателя, частота вращения вала fp и момент на валу двигателя.
Результаты экспериментальных исследований показали, что для испытываемой модели дугостаторного двигателя достигается снижение верхней границы частотного диапазона напряжения двигателя от 45-50 до 20-25 Гц.
В точках переключения обмоток зарегистрированы незначительные переходные моменты на валу, достигающие 5-7% от среднего значения момента электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНОУПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2100898C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2194355C2 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2316109C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2359400C2 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2253940C2 |
| ЧАСТОТНЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2581629C1 |
| ПОНИЖАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 2014 |
|
RU2558390C1 |
| Электропривод | 1980 |
|
SU1053253A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
Изобретение относится к электротехнике и может быть использовано в рельсовых транспортных средствах и непосредственно касается тяговых приводов локомотивов. Техническим результатом изобретения является ограничение диапазона регулирования частоты напряжения питания электродвигателя, что приводит к повышению его надежности. Частотно-управляемый асинхронный электропривод содержит электродвигатель с основной круговой и пусковой дуговой обмотками статора, датчик скорости электродвигателя и систему регулирования, состоящую из статического преобразователя частоты с автономным инвертором, блока управления преобразователем с обратной связью по датчику скорости и коммутатора обмоток, электрически связанного со статическим преобразователем частоты, основной круговой и пусковой дуговой обмотками и блоком управления преобразователем. Электропривод снабжен не менее чем одной дополнительной дуговой обмотками статора, подключенной к коммутатору, а диапазон частотного регулирования электродвигателя определяется общим числом, центральными углами и числами пар полюсов обмоток статора. 1 ил.
Частотно-управляемый асинхронный электропривод преимущественно рельсового транспортного средства, содержащий электродвигатель с основной круговой и пусковой дуговой обмотками статора, датчик скорости электродвигателя и систему регулирования, состоящую из статического преобразователя частоты с автономным инвертором, блока управления статическим преобразователем частоты, имеющего обратную связь по датчику скорости электродвигателя, и коммутатора обмоток, электрически связанного со статическим преобразователем частоты, основной круговой и пусковой дуговой обмотками статора и блоком управления статическим преобразователем частоты, при этом система регулирования посредством блока управления статическим преобразователем частоты формирует сигналы управления инвертором по алгоритму с однократной на периоде коммутацией силовых элементов, обеспечивает формирование частоты напряжения на выходе статического преобразователя частоты и определяет моменты переключения указанных обмоток статора путем сравнения частоты напряжения на выходе статического преобразователя частоты и частоты вращения вала электродвигателя, сигнал по которой поступает с датчика скорости электродвигателя, отличающийся тем, что электродвигатель снабжен не менее чем одной дополнительной дуговой обмоткой статора, подключенной к коммутатору обмоток, при этом диапазон регулирования частоты f1 напряжения на выходе статического преобразователя частоты  определяется пусковой частотой f1α1, напряжения питания пусковой дуговой обмотки статора, центральными углами αn и αn-1, а также числами пар полюсов рn и рn-1 соответственно подключаемой к статическому преобразователю и отключаемой от статического преобразователя частоты обмоток статора.
определяется пусковой частотой f1α1, напряжения питания пусковой дуговой обмотки статора, центральными углами αn и αn-1, а также числами пар полюсов рn и рn-1 соответственно подключаемой к статическому преобразователю и отключаемой от статического преобразователя частоты обмоток статора.
| ЧАСТОТНОУПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2100898C1 |
| RU 20147722 C1, 15.06.1994 | |||
| ТРЕХФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1997 |
|
RU2130689C1 |
| Способ частотного управления многообмоточным электродвигателем | 1981 |
|
SU1066023A1 |
| Регулируемый электропривод для низкоскоростного технологического оборудования | 1985 |
|
SU1385213A1 |

