Изобретение относится к рельсовым транспортным средствам и непосредственно касается тяговых приводов локомотивов.
Известен частотно-управляемый асинхронный электропривод, содержащий электродвигатель с дуговыми обмотками статора, датчик скорости электродвигателя и систему регулирования, включающую статический преобразователь частоты с автономными инверторами, подключенными каждый к отдельной дуговой обмотке статора, и блок управления преобразователем, имеющий обратную связь по датчику скорости и прямую связь со статическим преобразователем частоты. При этом напряжения (токи) автономных инверторов сдвинуты друг относительно друга на угол, определяемый числом дуговых обмоток статора (см. патент РФ №2194355 «Частотно-управляемый асинхронный электропривод» - прототип).
Недостатком данного технического решения является выход из строя электропривода в случае аварийного режима работы одного из автономных инверторов статического преобразователя.
Техническим результатом изобретения является повышение надежности электропривода путем отключения аварийного автономного инвертора и изменения алгоритма работы статического преобразователя.
Технический результат достигается тем, что в электроприводе, состоящем из электродвигателя с дуговыми обмотками статора, датчика скорости электродвигателя и системы регулирования, включающей статический преобразователь частоты с автономными инверторами, подключенными каждый к отдельной дуговой обмотке статора, и блок управления преобразователем, имеющего обратную связь по датчику скорости и прямую связь со статическим преобразователем частоты, статический преобразователь обеспечен коммутатором, подключенным к входам автономных инверторов, а блок управления имеет обратную связь по токам дуговых обмоток статора. В случае аварийного режима работы одного из автономных инверторов коммутатор обеспечивает отключение аварийного инвертора вместе с присоединенной к нему дуговой обмоткой по сигналу, поступающему от блока управления, и система регулирования формирует на выходах исправных автономных инверторов напряжения со смещением друг относительно друга на угол, определяемый числом действующих дуговых обмоток, с одновременным увеличением скольжения электродвигателя.
Сущность изобретения поясняется чертежами.
Электропривод состоит (фиг.1) из электродвигателя 1 с дуговыми обмотками 2 статора (в качестве примера на фиг.1 изображен электропривод с тремя дуговыми обмотками) и системы регулирования, которая содержит статический преобразователь частоты 3 с автономными инверторами 4, блок управления преобразователем 5, имеющий обратную связь по датчику скорости 6 электродвигателя 1 и прямую связь со статическим преобразователем частоты 3.
В электроприводе статический преобразователь частоты снабжен коммутатором 7, подключенным к входам автономных инверторов 4, а блок управления 5 имеет обратную связь по токам дуговых обмоток 2 статора электродвигателя 1. При возникновении аварийного режима работы одного из автономных инверторов 4 коммутатор 7 обеспечивает его отключение, и система регулирования формирует измененный алгоритм работы статического преобразователя частоты 3.
Электропривод работает следующим образом.
Регулирование электропривода осуществляется частотным способом. Система регулирования посредством блока управления 5 статическим преобразователем частоты 3 формирует сигналы управления автономными инверторами 4 по алгоритму с однократной на периоде коммутацией силовых элементов, обеспечивает изменение частоты напряжений (токов) на выходах автономных инверторов в соответствии с сигналом fp датчика скорости 6 электродвигателя 1 и сдвиг напряжений (токов) инверторов относительно друг друга на угол, определяемый числом дуговых обмоток 2 статора.
В случае возникновения аварийного режима работы одного из автономных инверторов 4 (режима опрокидывания автономного инвертора) в цепи подключенной к нему дуговой обмотки возникают ударные токи, превышающие номинальный в 5...7 раз и создающие ударный тормозной момент Мα т, который превышает среднее значение момента одной дуговой обмотки Мα ср [Электроподвижной состав с асинхронными тяговыми двигателями / Под ред. Н.А.Ротанова. - М.: Транспорт, 1991. - 334 с.]. Одновременные аварийные режимы в двух и более автономных инверторах мало вероятны, поэтому остальные дуговые обмотки работают в режиме частотного регулирования, создавая вращающие моменты со средними значениями Мα ср. В результате момент электродвигателя 1 (на фиг.2 приведена упрощенная форма момента электродвигателя Мдв с тремя дуговыми обмотками), представляющий собой сумму моментов дуговых обмоток Mαi, будет иметь просадку (участок АВС).
По сигналу от блока управления 5, имеющего обратную связь по токам дуговых обмоток 2 статора, коммутатор 7 отключает аварийный автономный инвертор вместе с присоединенной к нему дуговой обмоткой. При этом часть поверхности ротора электродвигателя, находящаяся под отключенной дуговой обмоткой, становится электромагнитно неактивной и не выделяет тепло, что повышает теплорассеяние ротора в целом [Фридкин П.А. Безредукторный дугостаторный электропривод. - Л.: Энергия, 1970. - 138 с., с.13] и позволяет допустить увеличенные значения скольжения электродвигателя [Стеклов В.К., Милько Р.Э. Системы управления с безредукторным приводом. - К.: Техника, 1983. - 120 с., с.9].
Для уменьшения пульсации момента электродвигателя 1 система регулирования формирует на выходах исправных автономных инверторов 4 напряжения (токи) со смещением друг относительно друга на угол

где k - общее число дуговых обмоток статора. При этом число действующих дуговых обмоток должно быть k - 1≥2.
Одновременно система регулирования увеличивает скольжение электродвигателя, что приводит к росту тока ротора и, следовательно, величины момента двигателя (фиг.2, участок DE).
Технико-экономическая эффективность изобретения в сравнении с прототипом заключается в том, что электропривод функционирует со статическим преобразователем частоты, снабженным коммутатором, который отключает аварийный автономный инвертор вместе с присоединенной к нему дуговой обмоткой по сигналу от блока управления, имеющего обратную связь по токам дуговых обмоток статора электродвигателя. При этом система регулирования изменяет алгоритм работы статического преобразователя, что позволяет обеспечить необходимые характеристики крутящего момента двигателя в аварийном режиме работы и, следовательно, повысить надежность электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНОУПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2100898C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2001 |
|
RU2231209C2 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2194355C2 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2359400C2 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2253940C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU904174A1 |
| Способ эксплуатации в синхронном режиме частотно-регулируемых асинхронных двигателей с фазным ротором | 2018 |
|
RU2694892C1 |

Изобретение относится к области электротехники и может быть использовано в тяговых приводах рельсового транспортного средства, в частности локомотивов. Техническим результатом является повышение надежности электропривода путем отключения аварийного автономного инвертора и изменения алгоритма работы статического преобразователя. В частотно-управляемом асинхронном электроприводе статический преобразователь частоты снабжен коммутатором, подключенным к входам автономных инверторов, а блок управления имеет дополнительную обратную связь по токам дуговых обмоток статора. В случае аварийного режима работы одного из автономных инверторов, коммутатор отключает аварийный инвертор вместе с присоединенной к нему дуговой обмоткой по сигналу, поступающему от блока управления. Система регулирования формирует на выходах исправных автономных инверторов напряжения (токи) со смещением друг относительно друга на угол, определяемый числом действующих дуговых обмоток, с одновременным увеличением скольжения электродвигателя. 2 ил.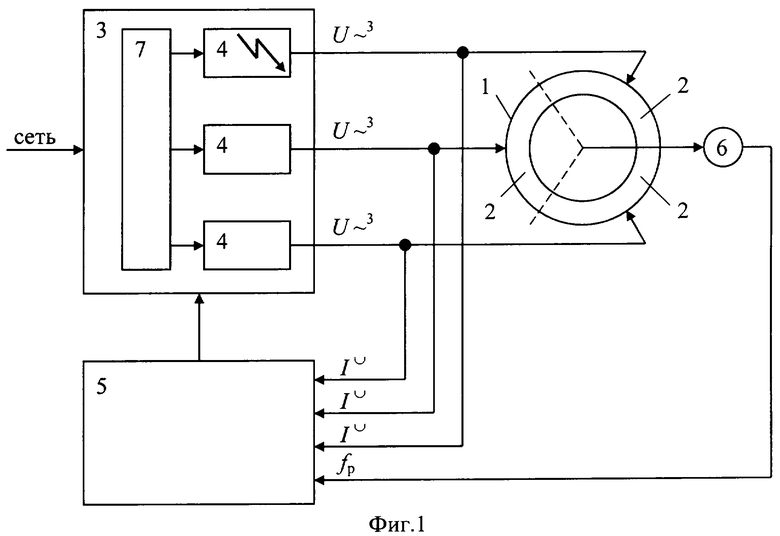
Частотно-управляемый асинхронный электропривод преимущественно рельсового транспортного средства, содержащий электродвигатель с дуговыми обмотками статора, датчик скорости электродвигателя и систему регулирования, состоящую из статического преобразователя частоты с автономными инверторами, подключенными каждый к отдельной дуговой обмотке статора, и блока управления статическим преобразователем частоты, имеющего обратную связь по датчику скорости электродвигателя и прямую связь со статическим преобразователем частоты, при этом система регулирования посредством блока управления статическим преобразователем частоты формирует сигналы управления инверторами по алгоритму с однократной на периоде коммутацией силовых элементов, обеспечивает изменение частоты напряжений на выходах автономных инверторов и сдвиг токов инверторов относительно друг друга на угол, определяемый числом дуговых обмоток, отличающийся тем, что статический преобразователь частоты снабжен коммутатором, подключенным к входам автономных инверторов, а блок управления имеет обратную связь по токам дуговых обмоток статора, при этом в случае аварийного режима работы одного из автономных инверторов коммутатор обеспечивает отключение аварийного инвертора вместе с присоединенной к нему дуговой обмоткой по сигналу, поступающему от блока управления, и система регулирования формирует на выходах исправных автономных инверторов напряжения со смещением относительно друг друга на угол, определяемый числом действующих дуговых обмоток, с одновременным увеличением скольжения электродвигателя.
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2194355C2 |
| ЧАСТОТНОУПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2100898C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2014722C1 |
| ТРЕХФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1997 |
|
RU2130689C1 |
| Регулируемый электропривод для низкоскоростного технологического оборудования | 1985 |
|
SU1385213A1 |
| Способ частотного управления многообмоточным электродвигателем | 1981 |
|
SU1066023A1 |
| US 6392905 A1, 21.05.2002 | |||
| US 2004075406 A1, 22.04.2004 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

