Изобретение относится к рельсовым транспортным средствам и непосредственно касается асинхронных тяговых приводов локомотивов.
Известен частотно-управляемый асинхронный электропривод [1], содержащий электродвигатель с основной круговой и пусковой дуговой обмотками статора, датчик скорости электродвигателя и систему регулирования, включающую статический преобразователь частоты с автономным инвертором, коммутатор обмоток и блок управления преобразователем с обратной связью по датчику скорости, при этом коммутатор обмоток электрически связан со статическим преобразователем частоты, основной круговой и пусковой дуговой обмотками и блоком управления преобразователем.
Недостатком этого технического решения является наличие высоких токовых нагрузок на элементы привода, вызванных повышенными значениями абсолютного скольжения электродвигателя при пуске, разгоне и движении с малыми скоростями.
Целью изобретения является повышение надежности привода путем снижения токовых нагрузок в силовой цепи привода вследствие уменьшения величины абсолютного скольжения двигателя.
Для достижения поставленной цели электропривод содержит электродвигатель с дуговым статором, датчик скорости электродвигателя и систему регулирования, которая состоит из подключенного к обмотке статора статического преобразователя частоты с автономными инверторами, блок управления преобразователем с обратной связью по датчику скорости.
Новым в изобретении является обеспечение электродвигателя несколькими дуговыми обмотками статора, каждая из которых подключена к отдельному автономному инвертору. При этом токи инверторов сдвинуты друг относительно друга на угол, определяемый количеством дуговых обмоток.
Изложенная сущность изобретения поясняется чертежом.
Электропривод содержит (фиг. 1) электродвигатель 1 с дуговыми обмотками 2 статора (в качестве примера на фиг. 1 изображен электропривод с тремя дуговыми обмотками) и систему регулирования, которая состоит из статического преобразователя частоты 3 с автономными инверторами 4, блока управления 5 преобразователем 3 с обратной связью по датчику скорости 6 электродвигателя 1. При этом блок управления 5 имеет прямую связь со статическим преобразователем частоты 3.
В электроприводе электродвигатель 1 содержит количество дуговых обмоток 2, необходимое для обеспечения требуемых характеристик крутящего момента двигателя. Дуговые обмотки 2 подключены к отдельным автономным инверторам 4 статического преобразователя частоты 3, токи которых сдвинуты друг относительно друга на угол, определяемый количеством дуговых обмоток 2.
Электропривод работает следующим образом.
Регулирование электропривода осуществляется частотным способом. Статический преобразователь частоты 3 вырабатывает напряжение (ток) питания электродвигателя 1. При этом блок управления 5 преобразователем частоты 3 формирует сигналы управления инверторами 4 по алгоритму с однократной на периоде коммутацией силовых элементов, а пусковая частота напряжения питания f1п дуговых обмоток 2 соответствует пусковым частотам частотно-регулируемых асинхронных тяговых двигателей с круговым статором, т. е. f1п = 0,8... 1,0 Гц [2].
Напряжения (токи) питания дуговых обмоток 2 статора электродвигателя 1 смещены друг относительно друга на угол, равный
где k ≥ 2 - количество дуговых обмоток статора.
Известно [2] , что в области низких частот f1 напряжения питания двигателя при законах управления статическим преобразователем частоты с однократной на периоде коммутацией силовых элементов (λ = 180 эл. градусов или λ = 120 эл. градусов) пульсации крутящего момента на валу двигателя
могут достигать 25% и более от его среднего значения. При этом частота следования пульсаций крутящего момента равна шестикратной частоте питающего напряжения, т. е. fδM = 6f1.
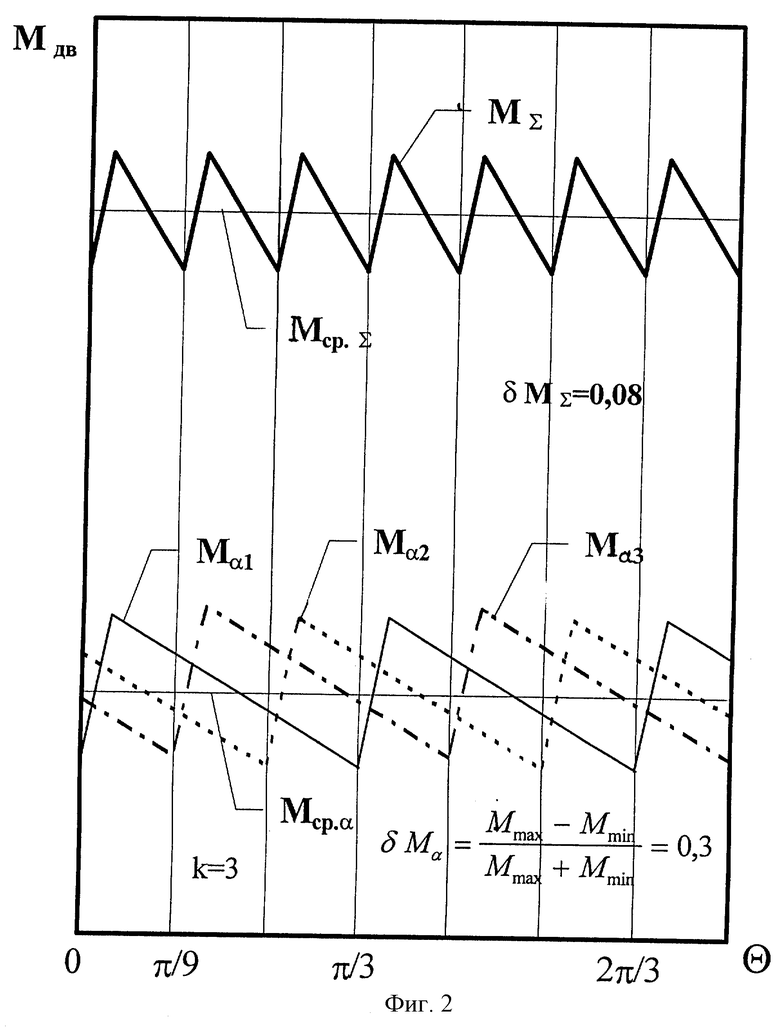
Суммирование крутящих моментов дуговых обмоток позволяет (на фиг. 2 приведен крутящий момент электродвигателя с тремя дуговыми обмотками) достичь необходимого среднего значения момента McpΣ электродвигателя, а также уменьшить до требуемого уровня относительную пульсацию δМ крутящего момента с одновременным увеличением частоты следования пульсаций до значений
fδM = 6kf1,
где f1 - частота напряжения питания электродвигателя.
Технико-экономическая эффективность изобретения в сравнении с прототипом заключается в том, что функционирование электропривода с питанием нескольких дуговых обмоток статора от отдельных автономных инверторов, токи которых сдвинуты на соответствующий угол, снижает токовые нагрузки в силовой цепи электропривода вследствие уменьшения величины абсолютного скольжения электропривода. Это повышает надежность электропривода.
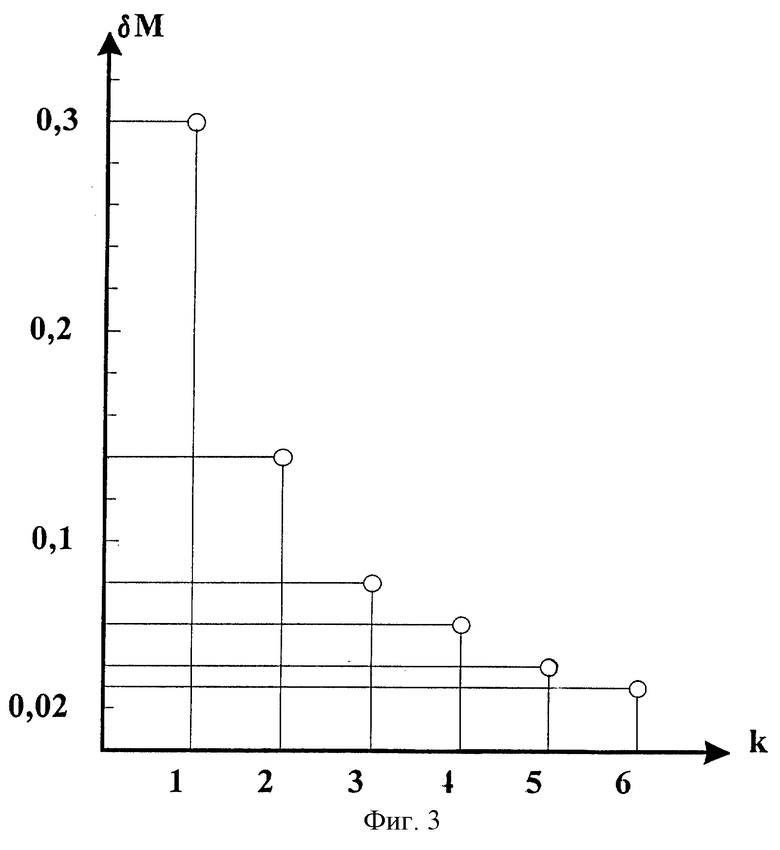
С целью выяснения характеристик предложенного электропривода были выполнены расчеты крутящего момента электродвигателя. Расчеты производились для числа дуговых обмоток k = 2, 3, 4; 5; 6 путем суммирования крутящих моментов обмоток, как показано на фиг. 2 для k = 3. Результаты вычислений, приведенные на фиг. 3, показали, что с увеличением количества обмоток величина относительной пульсации крутящего момента δМ уменьшается до 3% с одновременным увеличением частоты следования пульсаций fδM до 29... 36 Гц и среднего значения крутящего момента двигателя до 6Mcpα, где Mcpα - среднее значение момента от одной дуговой обмотки.
Источники информации
1. Патент РФ 2100898 "Частотно-управляемый асинхронный электропривод" от 31.05.96 - прототип.
2. Курбасов А. С. , Седов В. И. , Сорин Л.Н. "Проектирование тяговых электродвигателей", М., Транспорт, 1987, с.364-365.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2001 |
|
RU2231209C2 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2316109C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2359400C2 |
| ЧАСТОТНОУПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2100898C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2253940C2 |
| ШЕСТИФАЗНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С КОНЦЕНТРИЧЕСКИМИ ОБМОТКАМИ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2013 |
|
RU2540104C1 |
| УСТРОЙСТВО ДЛЯ ЧАСТОТНОГО ПУСКА И РЕГУЛИРОВАНИЯ СКОРОСТИ ВЫСОКОВОЛЬТНОГО СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2497268C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2012 |
|
RU2494518C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
Изобретение относится к локомотивостроению. Технический результат заключается в повышении надежности электропривода путем снижения токовых нагрузок в силовой цепи. Частотно-управляемый электропривод снабжен не менее чем двумя дуговыми обмотками статора электродвигателя, подключенными к отдельным автономным инверторам статического преобразователя частоты. Токи автономных инверторов сдвинуты относительно друг друга на угол, определяемый количеством дуговых обмоток. 3 ил.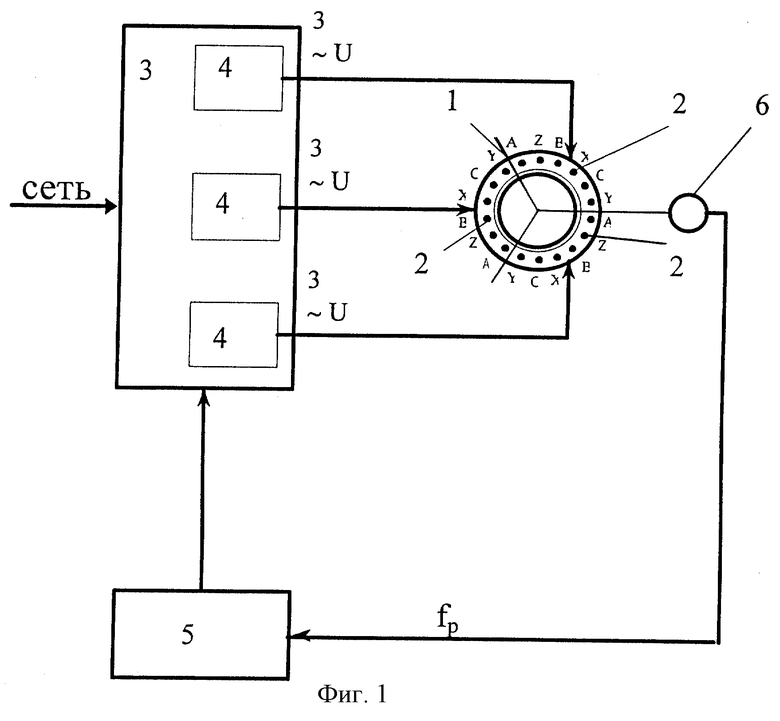
Частотно-управляемый асинхронный электропривод преимущественно рельсового транспортного средства, состоящий из электродвигателя с дуговым статором, датчика скорости электродвигателя и системы регулирования, содержащей подключенный к дуговым обмоткам статора статический преобразователь частоты с автономными инверторами, блок управления преобразователем с обратной связью по датчику скорости, имеющий прямую связь с преобразователем частоты, отличающийся тем, что электродвигатель снабжен не менее чем двумя дуговыми обмотками статора, подключенными к отдельным автономным инверторам статического преобразователя частоты, токи которых сдвинуты относительно друг друга на угол, определяемый количеством дуговых обмоток.
| ЧАСТОТНОУПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2100898C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2014722C1 |
| ТРЕХФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1997 |
|
RU2130689C1 |
| Регулируемый электропривод для низкоскоростного технологического оборудования | 1985 |
|
SU1385213A1 |
| Способ частотного управления многообмоточным электродвигателем | 1981 |
|
SU1066023A1 |
| 0 |
|
SU156322A1 |

