Предлагаемое изобретение относится к области пассивной радиолокации объектов наземного, морского, воздушного или космического базирования. Он предназначен для определения координат излучающего объекта по кривизне волнового фронта с учетом флюктуации фазы сигнала в каждом приемном канале пеленгатора.
Известны способы измерения координат активным методом [1]. Импульсный способ основан на измерении времени задержки отраженного от цели сигнала относительно зондирующего. Недостатком способа является то, что невозможно производить измерения малых дальностей и требуется большая импульсная мощность излучения. Частотный способ измерения дальности основан на измерении величины изменения частоты передатчика за время запаздывания отраженного от цели сигнала. Данный способ позволяет измерять малые дальности до цели, использует малые мощности. Однако он требует использования сложных сигналов. При фазовом способе измерения, дальность до цели определяется величиной изменения фазы модулирующих колебаний. Недостатком способа является неоднозначность измерения дальности, отсутствие разрешающей способности.
Известны пассивные способы измерения координат, основанные на использовании собственного излучения объектов [2]. Среди них наиболее широкое применение получили триангуляционный, базокорреляционный, а также способы, основанные на измерении углов прихода прямого сигнала и отраженного от поверхности и других объектов, и анализа изменения интенсивности принимаемых сигналов с последующим расчетом дальности до излучающих объектов. Недостатком данных способов-аналогов измерения дальности является то, что не учитываются искажения радиолокационных сигналов, приводящие к ухудшению точности измерения.
Наиболее близким по сущности к предлагаемому способу является пассивный "способ измерения дальности до источника излучения" (Ястребов Ю.В., Лихачев В.П. Заявка №95109676/09 (016808), положительное решение от 15.04.97) [3], заключающийся в том, что излученный целью радиосигнал принимают каждой i-ой антенной, усиливают в каждом i-ом приемном канале, измеряют частоту сигнала, формируют с помощью фазометров сигналы, амплитуды которых пропорциональны разности фаз (i равно 0, 1, 2,... , М/2) сигналов i-го и центрального (i равно 0) приемных каналов, измеряют синус угла прихода сигнала, получают сигналы, пропорциональные разности разностей фаз симметричных относительно центрального приемных каналах, дополнительно усиливают эти сигналы в i2 раз и суммируют их, а дальность до цели определяется по формуле:

где L - размер раскрыва антенны (база), м;
с - скорость света, м/с;
f - частота принимаемого сигнала, Гц;
γ s - угол между направлением на источник излучения и осью раскрыва антенны, град;
М+1 - количество элементов антенны;
i равно 0, ±1, ±2,... , ±М/2 - порядковый номер элемента антенны, причем номера возрастают по модулю от центрального (нулевого) к крайним (-М/2 и М/2), а номера, симметричные относительно центрального элемента антенны, различаются знаками;
Δ φ i=ϕ i-ϕ -i - разность разностей фаз i-x симметричных относительно центрального приемных каналов;
ϕ ± i - разность фаз сигналов, принимаемых ±i-м и центральным антенными элементами.
Устройство для реализации данного известного способа содержит (М+1) одинаковых антенных элементов (АЭ), расположенных друг относительно друга на расстоянии половины длины волны λ 0 источника излучения, (М+1) идентичных приемников, М-фазометров, частотомер, синхронизатор, причем центральный (i равно 0) АЭ подключен к входу соответствующего приемника, i-й антенный элемент через i-й приемник подключен к входу i-гo фазометра, а другой вход каждого фазометра подключен к выходу центрального нулевого приемника, который через частотомер, первый фазометр и синхронизатор подключен соответственно к 1-му, 2-му, 3-му входам блока вычисления дальности, выходы М фазометров подключены соответственно к М входам блока весового суммирования, выход которого подключен к 4-му входу блока вычисления дальности, а выход блока вычисления дальности является выходом устройства измерения дальности.
Способ-прототип и реализующее его устройство позволяют с учетом флюктуации фазы в каждом приемном канале определить дальность до источника излучения, находящегося в зоне Френеля. Однако, во-первых, практическая реализация устройства, соответствующего данному способу, имеет жесткие конструктивные ограничения как по количеству приемных каналов, так и по геометрическим размерам антенной решетки (АР) практически в любом диапазоне длин волн. Налагаемые ограничения обусловливают тот факт, что верхняя граница диапазона измерения дальностей устройством, соответствующим способу-прототипу, значительно меньше дальности действия различных по своему функциональному предназначению источников радиоизлучения, например таких, как радиолокационные станции, средства связи, навигации и передачи данных. Во-вторых, способу-прототипу, как и всем фазовым методам определения дальности, присуща неоднозначность ее измерения, обусловленная возможностью изменения фазы принимаемого сигнала по раскрыву АР более чем на 2π .
Цель предлагаемого изобретения состоит в расширении диапазона и устранении неоднозначности измерения дальности до источника радиоизлучения при равном количестве приемных каналов в устройствах, реализующих предлагаемый способ и способ-прототип. Цель достигается тем, что в известном способе, заключающемся в приеме излученного целью радиосигнала каждым из М+1 элементов эквидистантной линейной АР, расположенных друг относительно друга на расстоянии половины длины волны λ 0 источника излучения, усилении его в каждом приемном канале, измерении частоты f принятого сигнала, формировании с помощью фазометров сигналов, пропорциональных разности фаз сигналов в центральном и каждом из приемных каналов, определении направления прихода сигнала γ S1, получении сигналов, пропорциональных разности разностей фаз Δ φ симметричных относительно центрального приемных каналов, дополнительном усилении этих сигналов в квадрат порядкового номера симметричных каналов раз, суммировании полученных сигналов и расчете по формуле дальности до источника излучения, производится попарный вынос с каждого края АР N/2 антенных элементов (N много меньше М) и приблизительно равномерное их расположение на продольной оси АР в пределах зоны Френеля i-x невынесенных элементов (i равно 0, 1,... , (M-N)/2), определение дальности и углового положения вынесенных элементов, расчет по измеренным координатам точек привязки вынесенных элементов к продольной оси АР (определение их порядковых номеров jn), фазирование каналов вынесенных АЭ, предварительная оценка дальности r1 до источника излучения с учетом значений фазы принимаемого сигнала на вынесенных элементах по формуле
где с - скорость света;
 - база АР, образованной из (М+1) элементов,
- база АР, образованной из (М+1) элементов,
уточнение вектора координат Rh={rh, γ sh} и устранение неоднозначности определения дальности до источника радиоизлучения на основе алгоритма стохастической аппроксимации:

где μ =const;
 - среднеквадратическая ошибка (СКО) оценки фазы при h-ой итерации поиска вектора Rh;
- среднеквадратическая ошибка (СКО) оценки фазы при h-ой итерации поиска вектора Rh;
ϕ ’n(i) и ϕ ’n(i)h - реальное и расчетное значения разности фаз в n-x (i-x) вынесенных (невынесенных) каналах АР;
Δ Rh - случайное приращение вектора Rh={rh, γ sh} со средними значениями параметров rh и γ sh, равными r1 и γ s1, и диапазонами возможных значений Δ r1 и 3δ γ s1 соответственно, где:
rдз=(М’)2λ
qs - отношение сигнал/шум на входе приемников.
Таким образом, в предлагаемом способе определения координат выполняется следующая последовательность операций:
1. Вынос с каждого края АР N/2 (N много меньше М) АЭ на расстояния ρ ± n (n равно 1, 2... , N/2) от центрального АЭ (i равно 0) и приблизительно равномерное расположение их на продольной оси АР в пределах зоны Френеля невынесенных элементов.
2. Определение координат вынесенных элементов.
3. Привязка вынесенных элементов к центральному элементу АР (определение порядковых номеров вынесенных элементов ± jn).
4. Прием и усиление принятого сигнала в каждом приемном канале.
5. Определение частоты принимаемого сигнала, f.
6. Формирование напряжений в М каналах, пропорциональных разности фаз в i-ом (n-ом) и центральном (i равно 0) каналах, ϕ i(n).
7. Предварительная оценка угла прихода сигнала γ s1.
8. Фазирование вынесенных элементов относительно центрального элемента АР.
9. Вычитание сигналов в симметричных каналах.
10. Усиление сформированных сигналов в каждом из М+1 каналов в i2 (jn)2 раз.
11. Суммирование усиленных сигналов.
12. Предварительная оценка дальности до источника излучения с учетом значений фазы принимаемого сигнала на вынесенных элементах.
13. Уточнение координат и устранение неоднозначности определения дальности до источника радиоизлучения на основе алгоритма стохастической аппроксимации (случайного поиска).
Новыми существенными признаками изобретения являются:
- Вынос с каждого края АР N/2 элементов и приблизительно равномерное расположение их на продольной оси АР в пределах зоны Френеля невынесенных элементов.
- Определение координат вынесенных элементов.
- Привязка вынесенных элементов к центральному элементу антенной системы (определение порядковых номеров ±jn вынесенных элементов).
- Фазирование относительно центрального АЭ каналов n-х и -n-х вынесенных элементов.
- Предварительная оценка дальности до источника излучения с учетом значений фазы принимаемого сигнала на вынесенных элементах.
- Уточнение координат и устранение неоднозначности определения дальности до источника радиоизлучения на основе алгоритма стохастической аппроксимации.
Введение новых существенных признаков позволяет расширить диапазон и устранить неоднозначность измерения дальности до источника излучения при равном количестве приемных каналов в устройствах, реализующих предлагаемый способ и способ-прототип.
Сущность изобретения поясняется фиг.1-5.
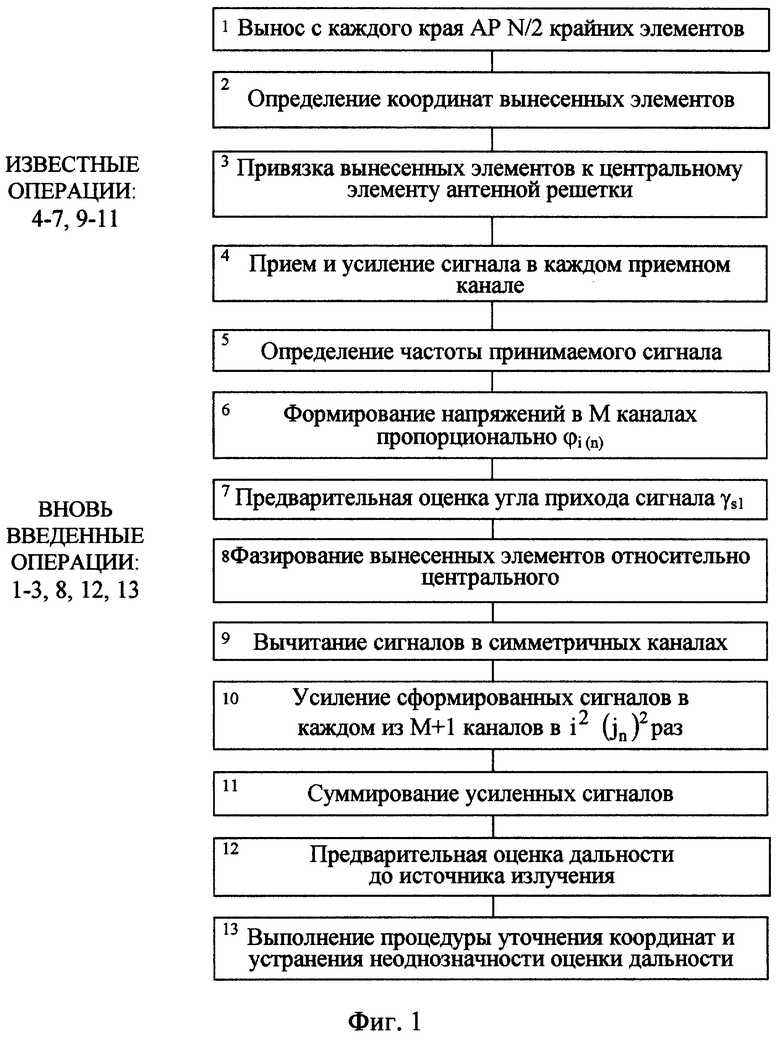
На фиг.1 представлена совокупность операций, составляющих сущность предлагаемого способа, где обозначено:
известные операции: 4-7, 8-11;
вновь введенные операции: 1-3, 8, 12, 13.
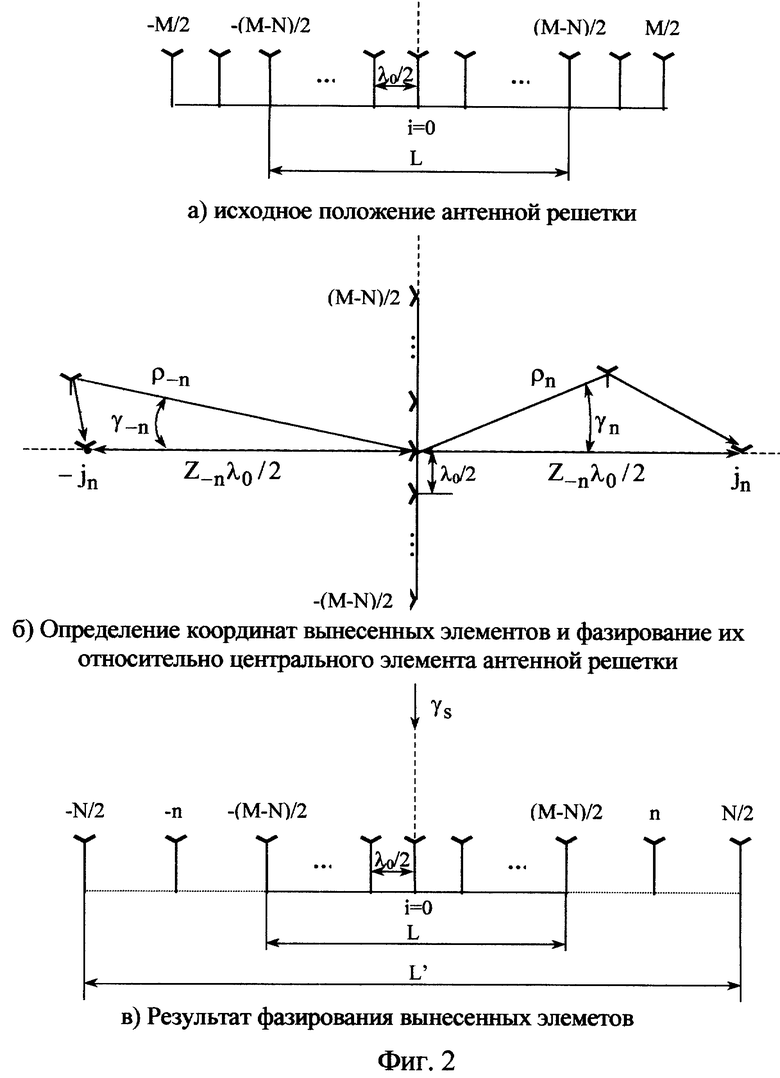
На фиг.2а, б и в представлены чертежи, поясняющие процесс определения координат вынесенных элементов и их фазирования относительно центрального элемента АР, где обозначено:
а) λ 0/2 - расстояние между элементами АР;
М+1 - общее количество элементов в АР в исходном положении;
N - количество выносимых элементов;
L=λ 0(M-N)/2 - база АР, состоящей из невынесенных элементов;
б) ρ ± n - расстояние между фазовыми центрами центрального и
± n-го вынесенного элемента;
γ ± n - угловое положение вынесенных элементов;
± jn=± max|± j± n| - точки привязки n-го и -n-го вынесенных к продольной оси АР в исходном положении;
Z-nλ 0/2 - расстояние между точкой привязки ± n-го вынесенного элемента и центрального элемента АР;
в) γ s1 -направление прихода сигнала источника радиоизлучения;
L’ - база антенной системы, состоящей из М+1 элементов после выполнения процедуры фазирования вынесенных элементов.
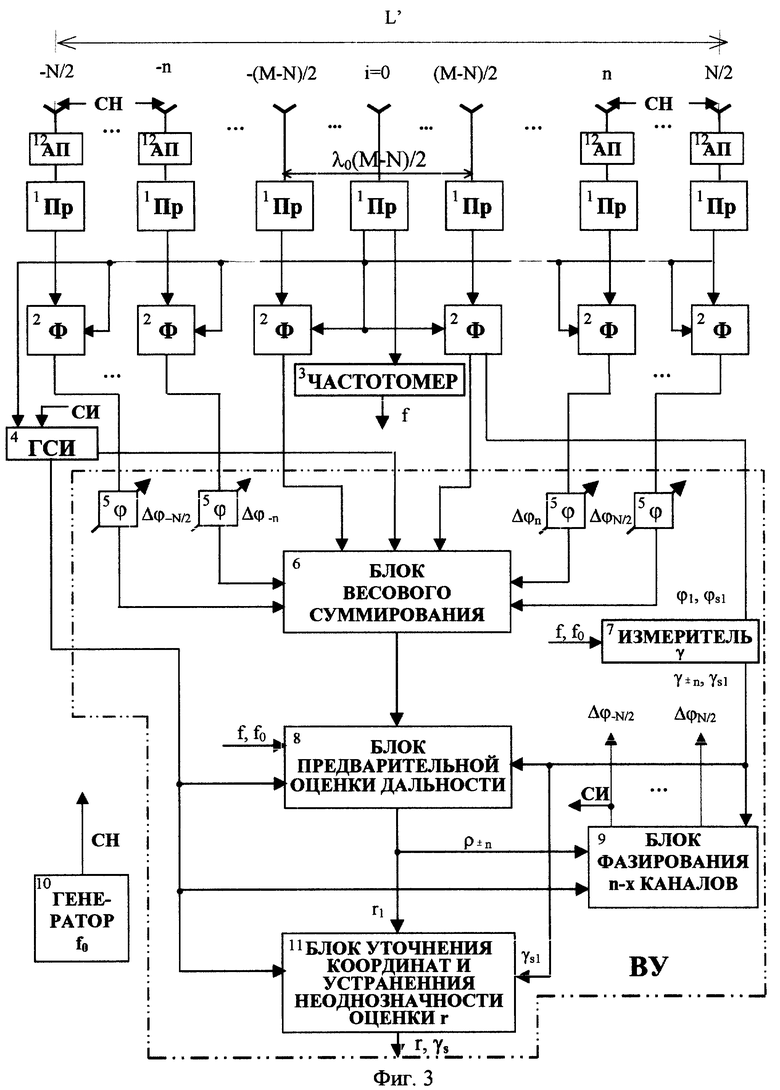
На фиг.3 представлена примерная схема устройства, реализующего предлагаемый способ, где обозначено:
1 - приемник;
2 - фазометр;
3 - частотомер;
4 - генератор синхроимпульсов (ГСИ);
5 - управляемый фазовращатель;
6 - блок весового суммирования;
7 - измеритель угла прихода сигнала источника радиоизлучения;
8 - блок предварительной оценки дальности;
9 - блок фазирования вынесенных элементов;
10 - генератор сигнала настройки (ГСИ);
11 - блок уточнения координат и устранения неоднозначности оценки дальности до источника радиоизлучения;
12 - антенный переключатель (АП).
На фиг.4 представлена схема блока 6 весового суммирования разности разностей фаз, где обозначено:
13 - преобразователь двоичного кода в дополнительный код двоичного числа;
14 - буфер памяти;
15 - запоминающее устройство (ЗУ) коэффициентов i2 и j
16 - сумматор двух чисел;
17 - умножитель двух чисел;
18 - сумматор М чисел.
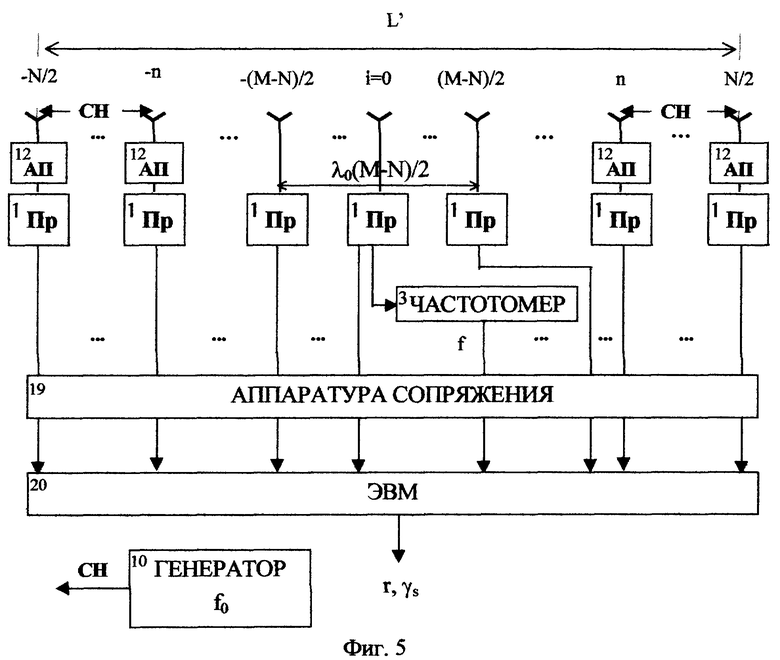
На фиг.5 представлен вариант построения устройства (фиг.3) с использованием ЭВМ, где обозначено:
19 - аппаратура сопряжения;
20 - ЭВМ.
Согласно фиг.1 (нумерация произведена в соответствии с вышеприведенным их перечислением) весь процесс определения текущих координат источника радиоизлучения организационно разбит на три основных этапа. Первоначально выполняются операции 1-3 подготовительного этапа, сущность которых заключается в следующем.
Предварительно с каждого края АР, состоящей из М+1 антенных элементов и аналогичной устройству-прототипу (фиг.2а), выносятся на расстояния ρ ± n от центрального АЭ N/2 антенных элементов (операция 1).
Причем выносимые элементы располагаются приблизительно равномерно на продольной оси АР в пределах зоны Френеля невынесенных антенных элементов [4]
ρ ± 1<ρ ± 2<... <ρ ± N/2

Определяют дальность и угловое положение вынесенных элементов. Эта задача, например, может быть выполнена с использованием известного способа [3]. Для АР решетку разворачивают на ± 90 градусов в направлении на вынесенные элементы (фиг.2б) и, поочередно подавая на них сигнал настройки на частоте f0, определяют дальность ρ ± n и угловое положение γ ± n вынесенных элементов (операция 2)

где L - база АР, состоящей из (M-N+1) не вынесенных элементов;
ϕ 1 - разность фаз между соседними (центральным и первым) невынесенными элементами АР при приеме сигнала настройки с ± n-го вынесенного элемента.
Выражение (1) преобразуется к виду (3) заменой произведения {... } конечной суммой степени натурального числа вида  [5].
[5].
Учитывая, что расстояние между невынесенными элементами АР равно  выражения (3, 4) упрощаются и принимают вид:
выражения (3, 4) упрощаются и принимают вид:

Учитывая отсутствие ограничений на мощность сигнала настройки, требуемая точность оценки координат n-х элементов обеспечивается соответствующим значением отношения сигнал (настройки)/шум на входе приемника [6]:

где

k=2π /λ 0 - волновое число;
Ii - коэффициент усиления i-гo элемента пеленгатора;
q - отношение сигнал (настройки)/шум на входе приемника;
ρ i - расстояние между фазовыми центрами центрального и i-гo невынесенного элемента АР.
После определения координат вынесенных элементов АР возвращают в исходное положение.
По определенным значениям ρ ± n производится привязка n-х элементов к центральному элементу АР (операция 3), заключающаяся в определении порядковых номеров j± n вынесенных элементов. Значения номеров j± n, соответствуют целому количеству полудлин волны сигнала настройки, укладываемых на расстояниях ρ ± n и определяют неточность симметрии n-го и -n-го вынесенных элементов относительно центрального. Максимальное из пары значений jn и j-n является точкой привязки n-го и -n-го АЭ к продольной оси АР в исходном положении (фиг.2б), находящейся на расстоянии ρ jn от центрального АЭ.


где Q± n - остаток от деления левой части выражения (8).
Далее выполняются операции 4-11 этапа фазирования вынесенных каналов и предварительной оценки координат источника излучения.
При наличии сигнала источника излучения осуществляется его обнаружение каждым из (М+1) приемных каналов (операция 4) и определение его несущей частоты f (операция 5). Аналогично способу-прототипу в дальнейшем производится формирование сигналов, пропорциональных разности фаз сигналов ϕ i(n) в каналах i-гo (n-го) и центрального АЭ (операция 6). Далее, например, аналогично [3] фазовым методом производится предварительная оценка направления на источник радиоизлучения γ s1 (операция 7)

где ϕ s1 - разность фаз между соседними (центральным и первым) невынесенными элементами АР при приеме сигнала источника излучения.
Учитывая, что на практике n-й и -n-й вынесенные элементы расположены несимметрично относительно центрального элемента АР, т.е. ρ n не равно ρ -n и γ n не равно γ -n (фиг.2б), возникает необходимость выполнения операции фазирования вынесенных элементов относительно центрального (операция 8). Данная операция заключается в расчете фазовых добавок Δ ϕ ± n, введение которых в приемные каналы вынесенных элементов соответствует виртуальному их перемещению в симметричные, относительно центрального элемента, точки ±jn на продольной оси АР в исходном положении (фиг 2в).

Затем производится формирование сигналов, пропорциональных разности фаз сигналов в симметричных каналах Δ φ i(n) (операция 9).

Полученные сигналы Δ φ (n) дополнительно усиливают в i2 (jn)2 раз (операция 10) и суммируют (операция 11)

На основе данных, полученных в ходе выполнения предыдущих операций, осуществляется предварительная оценка дальности до источника радиоизлучения (операция 12) с учетом информации о значениях фазы принимаемого сигнала на вынесенных элементах:
где M’=2max| jn|;
 - база АР, образованной из (М+1) элементов.
- база АР, образованной из (М+1) элементов.
При этом диапазон однозначного измерения дальности по трем элементам (двум крайним вынесенным и центральным антенным элементам) антенной системы составляет [4]:
где rд.з=(М’)2λ
На заключительном этапе производится выполнение процедуры уточнения координат Rh={rh, γ sh} и устранение неоднозначности оценки дальности до источника радиоизлучения (операция 13) на основе алгоритма стохастической аппроксимации [7-10]

где  - среднеквадратическая ошибка (СКО) оценки фазы при h-ой итерации поиска вектора Rh;
- среднеквадратическая ошибка (СКО) оценки фазы при h-ой итерации поиска вектора Rh;
μ =const;
ϕ ’n(i) и ϕ ’n(i)h - реальное и расчетное значения разности фаз в n-x (i-x) вынесенных (невынесенных) каналах АР;
Δ Rh - случайное приращение вектора Rh={rh, γ sh} сo средними значениями параметров rh и γ sh, равными r1 и γ s1, и диапазонами возможных значений Δ r1 (15) и  - отношение сигнал/шум соответственно.
- отношение сигнал/шум соответственно.
На фиг.3 приведен пример устройства, реализующего предлагаемый способ. Это устройство работает следующим образом. Первоначально с каждого края АР, состоящей из М+1 антенных элементов, закрепленных на стабилизированной поворотной платформе [11], выносятся N/2 крайних АЭ и равномерно устанавливаются с соблюдением условия (2) приблизительно на продольной оси АР (операция 1). Далее АР последовательно разворачивают на ± 90 градусов в направлении на вынесенные элементы и с выхода высокостабильного генератора (блок 10) на вход одного из n-х антенных элементов подают сигнал настройки (СН) на частоте f0. Приемные каналы остальных вынесенных элементов на время излучения сигнала настройки блокируются антенным переключателем 12 (АП). Аналогично работе устройства, реализующего способ-прототип, в соответствии с выражениями (5, 6) производится определение координат р± n и γ ± n вынесенного элемента, значения которых оцифровываются и заносятся в память блока 9 фазирования n-х каналов. После определения таким образом координат всех вынесенных элементов (операция 2) АР возвращают в исходное положение. Блоком 9 в соответствии с (8, 9) производится определение точек привязки (порядковых номеров ±jn) каждой пары вынесенных элементов (n-го и -n-гo) к продольной оси АР в исходном положении (операция 3). Выполнением указанной операции завершается этап подготовки устройства к работе.
При наличии источника излучения его сигнал принимается всеми антенными элементами и поступает в приемники (блоки 1). Каждый из М+1 приемников осуществляет обнаружение, т.е. выделение на фоне внутренних шумов и других мешающих сигналов, усиление до нормированного уровня и оцифровку двоичным кодом принимаемого сигнала (операция 4). Сигнал с высокочастотного аналогового выхода центрального (нулевого) приемника поступает на вход частотомера (блок 3), который осуществляет измерение частоты f принимаемого сигнала и преобразование его значения в двоичный код (операция 5). Далее принятые сигналы подаются на фазометры (блоки 2). Каждый из М фазометров, определяющих степень корреляции двух сигналов [12], формирует двоичный код, пропорциональный разности фаз ϕ ± i(n) между сигналами с выходов ±i-гo (± n-гo) и центрального (i равно 0) приемников (операция 6). Сигналы разности фаз ϕ ± i, и ϕ ± n далее поступают в буферы памяти 14 (фиг.4) блока 6 весового суммирования и фазовращателей 5 соответственно. Сигнал с выхода первого фазометра помимо блока 6 поступает на вход измерителя угла (блок 7), который по разности фаз ϕ s1 в соответствии с (10) определяет предварительное значение синуса угла прихода сигнала γ s1 и переводит его в двоичный код (операция 7). На основе данных о координатах вынесенных элементов и информации о направлении прихода сигнала γ s1 блоком фазирования в соответствии с (11) производится расчет фазовых добавок Δ ϕ ± n. Сигналы фазовых добавок Δ ϕ ± n в двоичном коде поступают на управляющие входы фазовращателей 5. Фазовращатели, выполненные, например, на основе цифровых сумматоров [12, 13], осуществляют в соответствии с (11) формирование двоичных дискрет ϕ ± n’ (операция 8), которые подаются на соответствующие входы блока 6 весового суммирования. Одновременно с формированием сигналов Δ ϕ ± n блоком 9 фазирования формируется синхроимпульс (СИ), запускающий генератор 4 синхроимпульсов (ГСИ). Блок 4 осуществляет управление процессами суммирования и умножения в устройстве (ВУ).
Блок 6 весового суммирования (фиг.4), выполненный, например, на основе арифметических логических устройств, преобразователем кода 13 переводит двоичную информацию о значениях ϕ -i(n) в дополнительный код двоичного числа [12] и с помощью сумматоров 16 формирует модули дискрет |Δ φ i(n)|=| ϕ i(n)-ϕ -i(-n)| (операция 9), дополнительно умножителями 17 усиливает полученные сигналы в i2(j поступающая на вход блока 8 (фиг.3) предварительной оценки дальности. Блок 8 в соответствии с (14) осуществляет предверительное определение значения дальности до источника r1 (операция 12), которое наряду с информацией о его угловом положении γ s1 в качестве исходных данных поступает в блок 11 (фиг.3) уточнения координат и устранения неоднозначности оценки дальности.
поступающая на вход блока 8 (фиг.3) предварительной оценки дальности. Блок 8 в соответствии с (14) осуществляет предверительное определение значения дальности до источника r1 (операция 12), которое наряду с информацией о его угловом положении γ s1 в качестве исходных данных поступает в блок 11 (фиг.3) уточнения координат и устранения неоднозначности оценки дальности.
Блок 11 на основе алгоритма стохастической аппроксимации (16) выполняет заключительную процедуру по уточнению координат источника излучения и устранению возможной неоднозначности оценки дальности до него (операция 13). Выход блока 11 является выходом устройства. При необходимости по нескольким отсчетам R={r, γ s} может производиться определение производных от этих координат.
Конструкция предложенного устройства основана на использовании известных элементов и технических трудностей не представляет.
Очевидно, что изобретение не ограничивается вышеописанным примером его осуществления. Исходя из него могут быть предусмотрены и другие варианты, например, с использованием ЭВМ (фиг.5). В этом случае высокочастотная часть устройства остается неизменной, а цифровая информация о принимаемом сигнале с выходов приемников 1 через аппаратуру сопряжения 19, выполняющую согласующую функцию, поступает напрямую в ЭВМ 20. Тогда выполнение операций 1, 2 (в части использования генератора настройки 10), 4 и 5 осуществляется аналогично, а операции 2 (в части расчета координат вынесенных элементов) 3, 6-13 реализуется посредством соответствующего программного обеспечения ЭВМ.
Оценка реализуемости и эффективности предлагаемого способа проводилась математическими методами моделирования на ЭВМ. Операции 4-7, 9-11 известны, их реализация аналогична прототипу и сомнений не вызывает [1, 3, 4, 6].
Выполнение операции 1 производится путем механического перемещения N съемных антенных элементов вместе с приемниками и приблизительно равномерным расположением их с соблюдением условия (2) на продольной оси АР в исходном положении. Совместное перемещение АЭ и приемников производится с целью соблюдения идентичности значений фазовых искажений, вносимых антенно-фидерными трактами [14], во всех приемных каналах и особых трудностей не вызывает.
Реализация операции 2 производится путем поочередного излучения вынесенными антенными элементами сигнала настройки на частоте f0 и определении их координат в соответствии со способом-прототипом [3]. Требуемая точность оценки координат n-х элементов (положения фазовых центров) определяется погрешностью расположения фазовых центров невынесенных АЭ на продольной оси АР через каждые λ 0/2 и обеспечивается соответствующим выбором мощности сигнала [4, 6] генератора настройки.
Операции 3 и 8 по привязке вынесенных элементов к продольной оси АР (определения их порядковых номеров) и их фазированию являются расчетными и могут быть реализованы с помощью ЭВМ.
Возможность реализации операции 4 оценивалась по формуле радиотехнической разведки [15].
При расчетах принимались:
эквивалентная чувствительность приемников - 130 дБ/Вт, эквивалентная импульсная мощность источника излучения - 40 дБ/Вт, длина волны источника излучения λ
Для приведенных условий дальность разведки сигнала источника радиоизлучения Rртр составляет 300 км.
Выражение (14) по предварительной оценке дальности (операция 12) получено из выражения (3) путем добавления дополнительных слагаемых  учитывающих значения весовых коэффициентов и фазы принимаемого сигнала на вынесенных элементах после выполнения операций их привязки и фазирования. Такой подход позволяет аналогично прототипу производить оценку дальности с учетом флюктуации фазы сигнала во всех приемных каналах и соответствует случаю определения дальности по кривизне волнового фронта симметричной разреженной антенной решеткой [4].
учитывающих значения весовых коэффициентов и фазы принимаемого сигнала на вынесенных элементах после выполнения операций их привязки и фазирования. Такой подход позволяет аналогично прототипу производить оценку дальности с учетом флюктуации фазы сигнала во всех приемных каналах и соответствует случаю определения дальности по кривизне волнового фронта симметричной разреженной антенной решеткой [4].
Выполнение процедуры уточнения координат и устранения неоднозначности оценки дальности до источника (операция 13) производится на основе достаточно хорошо известного в теории адаптивных антенных решеток и экстремального управления алгоритма (16) стохастической аппроксимации [7-10]. В условиях возможной многоэкстремальности оцениваемой функции (неоднозначного соответствия фазы принимаемого сигнала дальности до источника и его угловому положению) применение именно этого алгоритма является наиболее предпочтительным по отношению к другим алгоритмам адаптации (градиентным, непосредственного обращения выборочной ковариационной матрицы, рекуррентным и каскадным и т.д.). Его использование в ходе выполнения процедуры 13 позволяет наиболее эффективным методом однозначно отыскать глобальный экстремум (исключить неоднозначность) оцениваемой функции, когда о характере ее поведения практически ничего не известно [7-10].
После выполнения операции 13 достигается потенциальная точность оценки углового положения и дальности до источника излучения симметричной разреженной антенной решеткой [4, 6]

где
Реализация алгоритма 16 осуществляется на ЭВМ и особых трудностей не вызывает.
При необходимости расчета радиальной Vr и тангенциальной Vτ скоростей движения носителя источника излучения операции (4-13) повторяются через промежуток времени Δ t. В результате этого оценивается изменение расстояния ± Δ r и углового положения ± Δ γ s между фазовыми центрами антенн источника излучения и АР, соответствующее интервалу Δ t. Тогда, полагая движение носителя источника излучения прямолинейным,

Математические расчеты показали, что предлагаемый способ обеспечивает более широкий диапазон измерения дальности до источника излучения при равном количестве идентичных приемных каналов в устройствах, реализующих данный способ и способ-прототип. Так, например, полагая расстояние между АЭ равным 0,05 м (λ равно 0,1 м) и количество приемных каналов (М+1) в предлагаемом устройстве и устройстве-прототипе равным 61, получаем в соответствии с [4] следующие значения диапазонов определения дальности до источника излучения (границ зоны Френеля):
а) Способ и устройство-прототип.
Радиус ближней зоны 
Радиус дальней зоны 
Диапазон измеряемой дальности 
б) Предлагаемый способ и устройство.
Приняв общее количество выносимых антенных элементов N, равным 10, определим границы зоны Френеля для АР, состоящей из невынесенных элементов (AP1)


Полагаем операции выноса, определения координат, привязки и фазирования n-х элементов выполненными так, что их фазовые центры расположены равномерно в пределах зоны Френеля AP1 и симметрично относительно ее центрального элемента. В этом случае максимальная база L’ АР, состоящей из М+1 антенных элементов, составляет 250 м. Тогда потенциальный диапазон измеряемых дальностей составляет:
Таким образом, предлагаемый способ потенциально позволяет увеличить диапазон измеряемой дальности по сравнению с прототипом более чем 7 тысяч раз и достичь потенциальной точности оценки координат источника излучения (17).
Ограничивая верхнюю границу диапазона измеряемой дальности дальностью радиотехнической разведки Rртр для приведенных выше условий можем определить потребные размеры Lтр АР (максимальное расстояние выноса n-х антенных элементов).

Для таких размеров АР нижняя граница измеряемой дальности составляет 2,7 км.
В случае приближения источника излучения к нижней границе измеряемой дальности возможно дальнейшее сопровождение цели по дальности. С этой целью производится последовательное исключение из обработки каналов крайних вынесенных элементов, что соответствует последовательному уменьшению геометрических размеров (базы) АР, а следовательно, и нижней границы измеряемой дальности.
Таким образом, цель изобретения, заключающаяся в расширении диапазона и устранении неоднозначности измерения дальности до источника радиоизлучения при равном количестве приемных каналов в устройствах, реализующих предлагаемый способ и способ-прототип, достигнута.
Литература
1. Теоретические основы радиолокации /Ширман Я.Д., Голиков В.Н., Бусыгин И.Н. и др. /Под. ред. Я.Д.Ширмана - М: Сов. Радио, 1970.
2. Ван Брант Л.Б. Справочник по методам радиоэлектронного подавления и помехозащищенности систем с радиолокационным управлением. Пер. с англ. под. ред. Фомичева К.И., Юдина Л.М. М.: Воениздат, 1985.
3. Ястребов Ю.В., Лихачев В.П. Способ измерения дальности до источника излучения. Заявка №95109676/09 (016808), положительное решение от 15.04.97.
4. Пространственно-временная обработка сигналов /Кремер И.Я., Кремер А.И., Петров В.М. и др. /Под ред. И.Я.Кремера. - М.: Радио и связь, 1984.
5. Градштейн И.О., Рыжик И.М. Таблицы интегралов, сумм, рядов и произведений. М.: Наука, 1971.
6. Понькин В.А., Романов А.Д. О потенциальной точности измерения дальности при пассивной радиолокации. - Радиотехника и электроника, 1983, т.28, №8, отдельный оттиск, с.1660-1661.
7. Красовский А.А. и др. Теория корреляционно-экстремальных навигационных систем. М.: Наука, 1979.
8. Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер. с англ. - М.: Радио и связь, 1986, - 448 с.
9. Белоглазов И.Н. Корреляционно-экстремальные системы. М.: Сов. радио, 1974.
10. Растригин Л.А. Системы экстремального управления. М.: Наука, 1974.
11. Радиоуправление реактивными снарядами и космическими аппаратами. /Под ред. Л.С. Пушкин. M.: Сов. радио, 1968.
12. Цифровые радиоприемные системы (справочник). /Под ред. М.И.Зодзишского. - М., Радио и связь, 1990.
13. Горшков Б.И. Радиоэлектронные устройства (справочник). М.: Радио и связь, 1984.
14. Бова Н.Т., Резников Г.Б. Антенны и устройства СВЧ. Киев, Вища школа, 1982.
15. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. М.: Сов. Радио, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА С ИСТОЧНИКОМ ИЗЛУЧЕНИЯ СИГНАЛОВ С РАЗНЫМИ ЧАСТОТАМИ | 2011 |
|
RU2469349C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В БЛИЖНЕЙ ЗОНЕ | 2006 |
|
RU2308735C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| Способ пеленгации источников радиоизлучения | 2022 |
|
RU2788079C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ЧЕТЫРЕХКАНАЛЬНОЙ ДОПЛЕРОВСКОЙ РЛС | 2014 |
|
RU2572357C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2292560C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ДОПЛЕРОВСКОЙ РЛС С ЛИНЕЙНОЙ АНТЕННОЙ РЕШЕТКОЙ | 2014 |
|
RU2569843C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ МНОГОКАНАЛЬНОЙ ФАЗОВОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2527943C1 |
| АДАПТИВНАЯ РАДИОЛИНИЯ ПЕРЕДАЧИ ДАННЫХ ДЕКАМЕТРОВОГО ДИАПАЗОНА РАДИОВОЛН | 2017 |
|
RU2658591C1 |

Изобретение относится к области пассивной радиолокации и может быть использовано для определения координат излучающего объекта по кривизне волнового фронта с учетом флюктуации фазы сигнала в каждом приемном канале пеленгатора. Технический результат заключается в расширении диапазона и устранения неоднозначности измерения дальности до источника радиоизлучения при равном количестве приемных каналов. Способ заключается в приеме излученного целью радиосигнала каждым элементом эквидистантной линейной антенной решетки (АР), усилении его в каждом приемном канале, измерении его частоты, формировании с помощью фазометров сигналов, пропорциональных разности фаз сигналов в центральном и каждом из приемных каналов, определении направления прихода сигнала, получении сигналов, пропорциональных разности разностей фаз симметричных относительно центрального приемных каналов, дополнительном усилении этих сигналов, суммировании полученных сигналов, расчете дальности до источника излучения, а также осуществляют попарный вынос крайних элементов линейной эквидистантной АР и приблизительно равномерно их располагают на продольной оси АР в пределах зоны Френеля невынесенных элементов, определяют координаты и точки привязки к продольной оси АР вынесенных элементов, а также производят фазирование каналов, предварительно оценивая дальность до источника излучения с учетом значений фазы принимаемого сигнала на вынесенных элементах, уточнение координат и устранение неоднозначности оценки дальности на основе алгоритма стохастической аппроксимации. 5 ил.
Способ оценки текущих координат источника радиоизлучения, заключающийся в приеме излученного целью радиосигнала каждым из М+1 элементов эквидистантной линейной антенной решетки (АР), расположенных друг относительно друга на расстоянии половины длины волны λ 0 источника излучения, усилении его в каждом приемном канале, измерении частоты f принятого сигнала, формировании с помощью фазометров сигналов, пропорциональных разности фаз сигналов в центральном и каждом из приемных каналов, определении направления прихода сигнала γ s1, получении сигналов, пропорциональных разности разностей фаз Δ φ симметричных относительно центрального приемных каналов, дополнительном усилении этих сигналов в квадрат порядкового номера симметричных каналов раз, суммировании полученных сигналов и расчете по формуле дальности до источника излучения, отличающийся тем, что осуществляют попарный вынос с каждого края АР N/2 антенных элементов, где N много меньше М, и приблизительно равномерно их располагают на продольной оси АР в пределах зоны Френеля i-x невынесенных элементов, где i=0, 1, ... , (M-N)/2, определяют дальность и угловое положение вынесенных элементов, рассчитывают по измеренным координатам точки привязки вынесенных элементов к продольной оси АР и таким образом определяют их порядковые номера jn, осуществляют фазирование каналов n-х вынесенных антенных элементов, где n=0, 1, ... , N/2, предварительно оценивают дальность r1 до источника излучения с учетом значений фазы принимаемого сигнала на вынесенных элементах по формуле
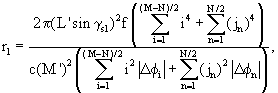
где с - скорость света;
M’=2max|jn|;
Δ φ i=ϕ i-ϕ -i и Δ φ n=ϕ n-ϕ -n - разность разностей фаз i-x и n-х симметричных относительно центрального приемных каналов соответственно;
ϕ ± i и ϕ ± n - разность фаз сигналов, принимаемых ± i-м и ± n-м и центральными антенными элементами соответственно;
 - база АР, образованной из (М+1) элементов, уточняют вектор координат Rh={rh, γ sh} и устраняют неоднозначность определения дальности до источника радиоизлучения на основе алгоритма стохастической аппроксимации
- база АР, образованной из (М+1) элементов, уточняют вектор координат Rh={rh, γ sh} и устраняют неоднозначность определения дальности до источника радиоизлучения на основе алгоритма стохастической аппроксимации

где μ =сonst;
 - среднеквадратическая ошибка (СКО) оценки фазы при h-й итерации поиска вектора Rh;
- среднеквадратическая ошибка (СКО) оценки фазы при h-й итерации поиска вектора Rh;
ϕ ’n(i) и ϕ ’n(i)h - реальное и расчетное значения разности фаз в n-х (i-x) вынесенных (невынесенных) каналах АР;
Δ Rh - случайное приращение вектора Rh={rh, γ sh} со средними значениями параметров rh и γ sh, равными r1 и γ s1, и диапазонами возможных значений Δ r1 и 3δ γ s1, соответственно;
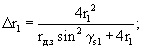
rдз=(М’)2λ0/2 - радиус дальней зоны для трех элементной АР с базой L’;
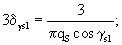
qS - отношение сигнал/шум.
| RU 95109676 А, 10.05.1997 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134431C1 |
| АНТЕННЫЙ КРЕСТ | 1998 |
|
RU2147135C1 |
| СПОСОБ РЕКОНСТРУКЦИИ НАСАЖДЕНИЙ | 1995 |
|
RU2105464C1 |
| US 4352167, 28.09.1982. | |||

