Предлагаемое изобретение относится к области систем автоматического управления динамическими объектами с неконтролируемыми возмущениями, неизвестными переменными параметрами и временной задержкой в канале управления, у которых диапазон спектра собственных частот контура управления превышает спектр рабочих частот самого объекта. Предполагается, что соотношение диапазонов рабочих частот объекта и спектра управляющих сигналов, а также максимально возможное значение временной задержки известно.
Прототипом предлагаемого изобретения является беспоисковая адаптивная система управления с идентификатором и неявной эталонной моделью, описанная в изобретении [1]. Структурная схема адаптивной системы управления для объектов с неконтролируемыми возмущениями включает в себя сумматор, два регулятора (один в прямой и один в обратной связи), фильтр низких частот, объект управления и контур адаптации. Последний, в свою очередь, состоит из блока текущей идентификации блока априорной информации о матрице эффективности управления объекта и блока настройки регуляторов.
Рассмотрим построение такой системы управления для следующей задачи. Пусть объект управления (ОУ) на текущем интервале времени t∈[t0, ∞[ описывается следующим матричным дифференциальным уравнением

где x∈Rn - непосредственно измеряемый вектор состояния ОУ; и ∈Rm - вектор управления (в дальнейшем - закон управления); τ - неизвестное время задержки управления, общее по всем скалярным управлениям, максимально возможное значение которого известно; f - вектор неконтролируемых внешних возмущений, ограниченный по норме; А, В - матрицы неизвестных параметров ОУ с соответствующими размерностями, в общем случае переменные по времени и по состоянию;  - непосредственно измеряется или аналитически вычисляется по x(t).
- непосредственно измеряется или аналитически вычисляется по x(t).
Адаптивная система должна формировать такой закон управления, чтобы ОУ вел себя подобно эталонной модели, которая задана неявным образом в виде следующего дифференциального уравнения

где хм - вектор состояния модели; uм - ограниченное по норме входное воздействие модели; размерности соответствуют уравнению (1); Ам и Вм - матрицы параметров модели в общем случае переменные по времени, причем оператор Ам - асимптотически устойчивый.
О качестве адаптивной системы управления будем судить по величине е=х-хм, которую назовем ошибкой адаптации. Точное слежение ОУ за ЭМ можно обеспечить только тогда, когда выполнено условие полного соответствия моделей [2]

или, что тождественно

где B+ - псевдообратная матрица к В. При выполнении условия (3) и нулевой задержке τ управление, которое назовем точным:

обеспечит асимптотические свойства ошибки адаптации [1].
По условию матрицы А, В и внешние возмущения (не измеряются, поэтому вместо (4) реальный закон управления будет в виде

где  и
и  - оценки матриц А и В, доставляемые блоков текущей идентификации.
- оценки матриц А и В, доставляемые блоков текущей идентификации.
В качестве алгоритма текущей идентификации используется рекуррентный алгоритм типа стохастической аппроксимации, который описывается следующим образом [3]

где С=[А, В] - блочная матрица параметров; i - квантор времени с шагом  - невязка, называемая в дальнейшем ошибкой идентификации (не путать с ошибкой оценивания параметров системы);
- невязка, называемая в дальнейшем ошибкой идентификации (не путать с ошибкой оценивания параметров системы);  - расширенный вектор состояния ОУ; Гi - в общем случае переменная положительно определенная квадратная матрица размерностью (n+m) или скаляр.
- расширенный вектор состояния ОУ; Гi - в общем случае переменная положительно определенная квадратная матрица размерностью (n+m) или скаляр.
Если следующие нормы векторов и матриц ограничены:  что справедливо для подавляющего большинства прикладных задач, то можно показать, что при достаточно большой норме матрицы Г с течением времени ε→0. Причем это происходит без каких-либо дополнительных условий, кроме указанных выше, в отличие от оценок параметров, сходимость которых к истинным значениям требует соблюдения целого ряда условий, в том числе отсутствия неконтролируемых внешних возмущений [3]. В работах [1, 4, 5] показано, что при выполнении условий
что справедливо для подавляющего большинства прикладных задач, то можно показать, что при достаточно большой норме матрицы Г с течением времени ε→0. Причем это происходит без каких-либо дополнительных условий, кроме указанных выше, в отличие от оценок параметров, сходимость которых к истинным значениям требует соблюдения целого ряда условий, в том числе отсутствия неконтролируемых внешних возмущений [3]. В работах [1, 4, 5] показано, что при выполнении условий

или

уравнение динамики ошибки адаптации в замкнутой ЗУ (5) системе имеет вид

Дифференциальное уравнение (9) устойчивое с возмущением Кε, при ε→0 обеспечивает достижение цели адаптации: e→0.
Для соблюдения условий (7) или (8) в изобретении [1] предлагается внести в структурную схему системы управления блок априорной информации о матрице эффективности управления объекта, который выдает в блок текущей идентификации информацию о матрице В0 с размерностью n×m. Эта матрица учитывает априорную информацию о матрице эффективности управления в виде соблюдения равенства [1]
В блоке текущей идентификации матрица В0 используется для коррекции матрицы  , чтобы скорректированная оценка
, чтобы скорректированная оценка  удовлетворяла условиям (7, 8).
удовлетворяла условиям (7, 8).
Однако раскрытый в прототипе [1] подход содержит недостатки.
Во-первых, использование априорной информации о матрице эффективности управления не всегда возможно. Это относится к случаям отсутствия таковой или практической сложности ее получения, например, при полете самолета, как объекта управления, на сложных априорно неопределенных режимах в области закритических углов атаки [6].
Во-вторых, в законе управления не учитывается временная задержка управления, вызывающая ряд нежелательных последствий, например раскачку регулируемых координат.
Задачей данного изобретения является устранение указанных недостатков. Для ее решения предлагается следующий подход.
При ненулевой задержке τ целесообразно управление (4) пропускать через форсирующее звено первого порядка с постоянной времени, равной τ: известно, что это звено в диапазоне частот 0-0.7/τ сдвигает выходной сигнал относительно входа вперед на интервал, приблизительно равный τ. В результате вместо (4) получим следующий точный закон управления:
Для получения аналогичного реального закона в системе должна быть оценена τ, а управление (5) - пропущено через форсирующее звено с постоянной времени  , где
, где  - оценка временной задержки управления.
- оценка временной задержки управления.
Для реализации указанного предлагается процесс идентификации разбить на два этапа:
I. Получение оценок матрицы эффективности управления  и временной задержки управления
и временной задержки управления  . Для формирования этого этапа целесообразно в структурной схеме системы выделить отдельным блоком процедуру оценивания матрицы эффективности управления и временной задержки. В состав системы также включить полосовой частотный фильтр.
. Для формирования этого этапа целесообразно в структурной схеме системы выделить отдельным блоком процедуру оценивания матрицы эффективности управления и временной задержки. В состав системы также включить полосовой частотный фильтр.
II. Получение оценки матрицы собственной динамики ОУ  - предусматривается организовать в блоке текущей идентификации прототипа, который в дальнейшем будет называться блоком второго этапа текущей идентификации.
- предусматривается организовать в блоке текущей идентификации прототипа, который в дальнейшем будет называться блоком второго этапа текущей идентификации.
Обоснуем необходимость предлагаемых изменений.
Очевидно, блок априорной информации о матрице эффективности управления объекта не нужен, если обеспечить достаточную точность определения указанной матрицы  . В пределе при
. В пределе при  условия (7) и (8) выполняются автоматически, при этом уравнение динамики ошибки адаптации будет иметь еще более простой вид, чем выражение (9)
условия (7) и (8) выполняются автоматически, при этом уравнение динамики ошибки адаптации будет иметь еще более простой вид, чем выражение (9)

Повышению точности  способствует следующее:
способствует следующее:
1. В отличие от измерений компонент вектора состояния, информация о которых часто содержит значительные динамические, флуктуационные и постоянные ошибки, измерение компонент вектора управления обеспечивается с высокой точностью. Например, измерение углового положения управляющей поверхности самолета с помощью датчика положения с дискретным выходом осуществляется с погрешностью не более угловой минуты [6].
2. Для реальной технической системы управления частотный диапазон сигналов управления, как правило, существенно шире диапазона частот динамики ОУ. Последний представляет собой, чаще всего, низкочастотное звено.
3. Точность оцениваемых параметров зависит от их количества, - чем больше параметров содержит математическая модель ОУ, тем труднее добиться высокой точности их оценивания (см. [7]). Если у ОУ (1) оценивать только элементы матрицы В, то количество оценок существенно сокращается и тем самым облегчаются условия их точного определения.
Для наглядной демонстрации последнего тезиса рассмотрим одну из строк системы (1)

где индекс k указывает номер строки уравнения (1). Отклик  (термин регрессионного анализа) является реакцией на все сигналы в правой части уравнения (10). Для сокращения числа оцениваемых параметров необходимо выделить из сигнала отклика составляющую, являющуюся реакцией только на сигналы управления.
(термин регрессионного анализа) является реакцией на все сигналы в правой части уравнения (10). Для сокращения числа оцениваемых параметров необходимо выделить из сигнала отклика составляющую, являющуюся реакцией только на сигналы управления.
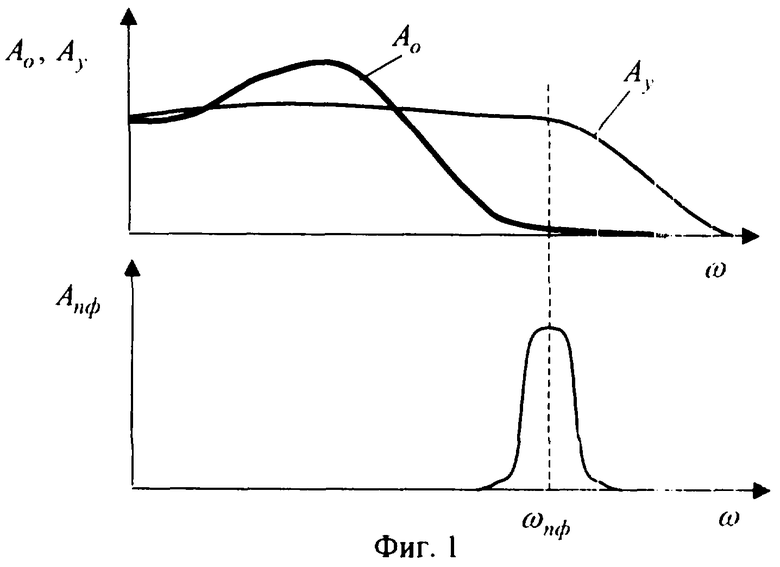
Для этого используем факт различия в спектрах рабочих частот ОУ и управляющих сигналов. Предлагается пропустить все переменные уравнения (10) через полосовой фильтр, с амплитудно-частотной характеристикой (АЧХ), изображенной на фиг.1. На фиг.1 обозначены: А0 - АЧХ ОУ; Ay - спектр сигналов управления; Аnф - АЧХ полосового фильтра. При обеспечении узости АЧХ фильтра, последний пропускает сигналы практически только с частотой ωnф, которую будем называть частотой выделения фильтра.
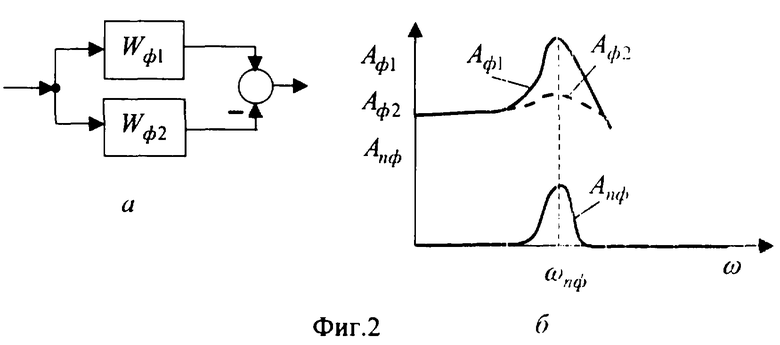
Обеспечить наиболее простую реализацию такого полосового фильтра можно по схеме, изображенной на фиг.2(а). Здесь Wф1, Wф2 – передаточные функции колебательных звеньев с разными декрементами затухания. АЧХ колебательных звеньев (Aф1, Аф2) и получаемого полосового фильтра изображены на фиг.2(б).
Уравнение (10), записанное через выходные сигналы полосового фильтра, будет иметь вид

где верхний индекс "nф" обозначает соответствующие выходные сигналы полосового фильтра; gk- помеха, объясняемая неполным подавлением сигналов собственной динамики объекта на полосовом фильтре и внешними возмущениями. Как видим, количество оцениваемых параметров в уравнении (11) гораздо меньше, чем в модели (10).
Настраиваемая модель для текущей идентификации, ответственно будет иметь вид

Алгоритм идентификации для ОУ (1) в соответствие с выражением (6) имеет вид

где  - положительно определенная матрица. Естественным практическим требованием к возможности использования рассматриваемого подхода адаптивного управления является требование к малости нормы помехи g на частоте выделения.
- положительно определенная матрица. Естественным практическим требованием к возможности использования рассматриваемого подхода адаптивного управления является требование к малости нормы помехи g на частоте выделения.
Для ОУ со скалярным управлением алгоритм идентификации существенно упрощается, т.к. в этом случае вместо (11) будет

Отсюда следует, что для повышения точности  требуется, чтобы при unф ≠ 0 выполнялось gk → 0, т.е., чтобы отношение
требуется, чтобы при unф ≠ 0 выполнялось gk → 0, т.е., чтобы отношение  было достаточно большим. Последнее можно использовать на практике: вычислять по предложенному подходу оценки не постоянно, а только в случаях, когда норма вектора unф превышает экспериментально заданное пороговое значение.
было достаточно большим. Последнее можно использовать на практике: вычислять по предложенному подходу оценки не постоянно, а только в случаях, когда норма вектора unф превышает экспериментально заданное пороговое значение.
Для обоснования аналитических зависимостей определения коэффициентов матрицы эффективности управления и временной задержки рассмотрим последний пример со скалярным управлением. При ненулевой τ уравнение (14) принимает вид

Сигнал unф(t-τ) при узкой АЧХ полосового фильтра (см фиг.2) можно считать сигналом практически одной частоты ωnф, поэтому его можно описать в виде

где U(t) - переменная во времени амплитуда сигнала, ϕ0 - начальная фаза, η(t) - среднее значение гармонического сигнала. Динамика сигнала  полностью определяется динамикой управления unф(t-τk) (см. выражение (15)). Сигнал
полностью определяется динамикой управления unф(t-τk) (см. выражение (15)). Сигнал  также будет сигналом одной частоты ωnф, но сдвинутым на задержку τk. относительно сигнала unф
также будет сигналом одной частоты ωnф, но сдвинутым на задержку τk. относительно сигнала unф

Введем в рассмотрение сигнал μ(t), получаемый из дифференцирования выражения (16)

Графики сигналов (16-18) представлены на фиг.3. Тогда настраиваемую модель для идентификации неизвестных параметров уравнения (15) предлагается представить в виде

где zk соответствует отклику  unф(t), μ(t), 1 - факторы;
unф(t), μ(t), 1 - факторы;  ,
,  ,
,  - оценки параметров. В соответствии с (16-18) последнее соответствует равенству:
- оценки параметров. В соответствии с (16-18) последнее соответствует равенству:

Предположим далее, что алгоритм идентификации успешно "выделяет" гармоническую часть отклика от негармонической, тогда баланс гармонических сигналов из последнего соотношения запишется через равенство (можно отбросить U и ϕ0):

Предположим, что выполнено неравенство

Тогда баланс гармонических сигналов записывается

откуда по известной тригонометрической зависимости находятся искомые оценки

Для того, чтобы выполнялось соотношение (19). очевидно необходимо выполнение (19) для точных значений с1 и с2. Рассмотрим ситуацию, когда последнее выполняется.
Очевидно, максимальная величина  соответствует изменению полной амплитуды U за полпериода гармонического сигнала, поэтому будем считать
соответствует изменению полной амплитуды U за полпериода гармонического сигнала, поэтому будем считать  отсюда
отсюда  . Потребовав теперь, чтобы
. Потребовав теперь, чтобы  можно говорить об удовлетворении исходной постановки. Последнее, в свою очередь, согласно (20) для точных значений предполагает, что |ωnф τ|<45°=π/4.
можно говорить об удовлетворении исходной постановки. Последнее, в свою очередь, согласно (20) для точных значений предполагает, что |ωnф τ|<45°=π/4.
Отсюда формулируется ограничение на возможные значения временной задержки в канале управления объекта, накладываемое изложенной методикой определения искомых оценок:

В случае m-мерного управления идентификация коэффициентов эффективности управлений и временных задержек управлений осуществляется аналогичным образом. Для этого нужно использовать m полосовых фильтров с разными частотами выделения - для каждого управления свой. Получим систему из m уравнений вида (15). Оценивание временной задержки и коэффициента эффективности управления для каждого из управлений производится по изложенной выше методике. Полученные m оценок временной задержки целесообразно усреднить, определив таким образом общую оценку  .
.
Второй этап идентификации основывается на оценках  и
и  , доставленных первым этапом, и предназначен для определения оценки
, доставленных первым этапом, и предназначен для определения оценки  . Она определяется в соответствии с алгоритмом (6) по зависимости:
. Она определяется в соответствии с алгоритмом (6) по зависимости:

где  - положительно определенная матрица.
- положительно определенная матрица.
Для подтверждения изложенных выводов ниже приводятся результаты численных исследований на следующем примере.
Пусть объект управления представлен в виде модели продольного короткопериодического движения самолета
где α - угол атаки; ωz - угловая скорость тангажа; ϕz - угол отклонения стабилизатора (управление); Δϕz - закон управления; XT - задающее воздействие (линейное перемещение летчиком ручки управления по тангажу). Моделирование проводилось при условиях
ХT ∈ [-156...120] мм, α(0)=ωz(0)=0;
a11=-0.437 c-1; a21=0.194 c-2;a22=-0.663 c-1;
b=-0.0315 (с-2град-1); τ=0.05 с.
Эталонная модель:
Структурная схема полосового фильтра, используемого при численных исследованиях приведена на фиг 2(а). Здесь использовались передаточные функции

где  p - оператор дифференцирования Входными сигналами полосового фильтра являлись ϕz и ωz, выходными
p - оператор дифференцирования Входными сигналами полосового фильтра являлись ϕz и ωz, выходными  и
и  .
.
Цель управления - обеспечить слежение за эталоном по угловой скорости тангажа  .
.
Интегрирование дифференциальных уравнений математической модели объекта, работа алгоритмов идентификации и формирования управления осуществлялась с шагом 0.01 с. Управление перед поступлением на объект фильтровалось на апериодическом звене с постоянной времени 0,025 с. Кроме этого, в канал управления было введено звено чистого запаздывания на время 0,025 с. Таким образом, общая временная задержка управления составляла приблизительно 0,05 с. Заметим, что временная задержка (объекта удовлетворяет неравенству (21).
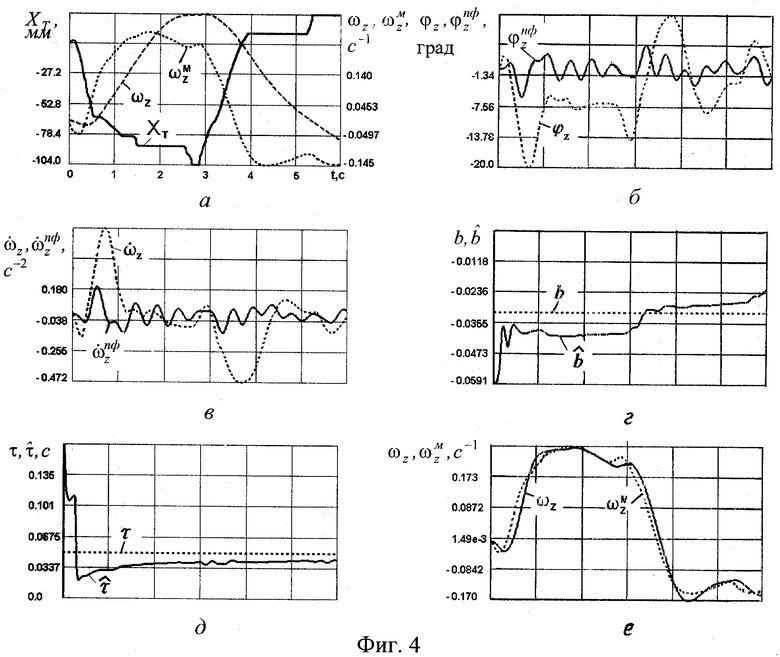
На фиг.4(a) приведены графики изменения угловой скорости ωz разомкнутого объекта (Δϕz=0) и эталонной модели  при отклонении ручки управления по тангажу, XT. Как видно, в этом случае реакция объекта на задающее воздействие далека от эталонной.
при отклонении ручки управления по тангажу, XT. Как видно, в этом случае реакция объекта на задающее воздействие далека от эталонной.
Теперь рассмотрим процессы в системе, замкнутой адаптивным законом управления. Задающее воздействие XT такое же, как на фиг.4(а).
На фиг.4(б) представлена динамика отклонения стабилизатора в замкнутой адаптивной системе, а также отклонение стабилизатора на частоте выделения  (выход полосового фильтра). На фиг.4(в) - изменение производной угловой скорости
(выход полосового фильтра). На фиг.4(в) - изменение производной угловой скорости  и этот же сигнал после прохождения полосового фильтра
и этот же сигнал после прохождения полосового фильтра  . Представленные результаты подтверждают, что выходные сигналы фильтра
. Представленные результаты подтверждают, что выходные сигналы фильтра  и
и  являются сигналами практически одной частоты ωnф.
являются сигналами практически одной частоты ωnф.
Первый этап идентификации сводится к определении оценок  и
и  (см. выражение (20))
(см. выражение (20))

Производные  и
и  определялись как отношения приращения угловой скорости ωz и отфильтрованного сигнала
определялись как отношения приращения угловой скорости ωz и отфильтрованного сигнала  на интервалe дискретизации к величине интервала дискретизации (0.01 с). Истинные значения и полученные оценки коэффициента эффективности стабилизатора b и задержки τ приведены на фиг.4(г, д).
на интервалe дискретизации к величине интервала дискретизации (0.01 с). Истинные значения и полученные оценки коэффициента эффективности стабилизатора b и задержки τ приведены на фиг.4(г, д).
Второй этап идентификации заключается в оценивании параметров a21 и a22. Здесь использовалась настраиваемая модель

В качестве алгоритма текущей идентификации на обоих этапах использовался рекуррентный метод наименьших квадратов с фактором забывания 0,98 [7].
Закон управления имеет вид

Изменение угловой скорости тангажа при использовании данного закона управления приведено на фиг.4(е). Как видно, в замкнутой адаптивной системе обеспечивается практически точное слежение за эталонной моделью.
Таким образом, предложенная схема адаптивного управления с идентификатором и эталонной моделью позволяет обеспечить заданные (в форме эталонной модели) показатели качества управления для объекта управления в условиях отсутствия априорной информации о параметрах его математической модели и временной задержки управления. Это способствует практическому внедрению адаптивных систем, а также позволяет расширить область, их использования.
Для реализации рассмотренного подхода необходимы следующие изменения адаптивной системы управления, предложенной в прототипе [1].
Так как процесс идентификации проходит в два этапа, то необходимо блок текущей идентификации прототипа разделить на два блока: блок первого этапа, где будет производиться оценивание матрицы эффективности управления объекта и временная задержка; блок второго этапа - для оценки матрицы собственной динамики ОУ.
В состав блока первого этапа идентификации входит логическое устройство, запускающее алгоритм идентификации этого этапа только при превышении нормой вектора unф заданного порогового значения. Также в состав системы вносится блок полосовых фильтров, предназначенный для высокочастотного полосового выделения сигналов управления в производной вектора состояния ОУ. Так как при такой реализации процесса идентификации выполняются условия для оценивания матрицы эффективности управления с высокой точностью, то блок априорной информации о матрице эффективности управления объекта становится не нужен и из адаптивной системы исключается. Не требуется также процедура коррекции оценки  .
.
Для компенсации временной задержки в систему вводится форсирующее звено  , через которое проходит управление перед поступлением его на объект.
, через которое проходит управление перед поступлением его на объект.
На фиг.1 представлены АЧХ объекта управления, какала управления и полосового фильтра.
На фиг.2 представлена структурная схема полосового фильтра и его АЧХ.
На фиг.3 приведены графики сигналов, пропущенных через полосовой фильтр для демонстрации методики оценивания коэффициента эффективности управления и временной задержки.
На фиг.4 приведены результаты численных исследований, подтверждающие приведенные теоретические выводы.
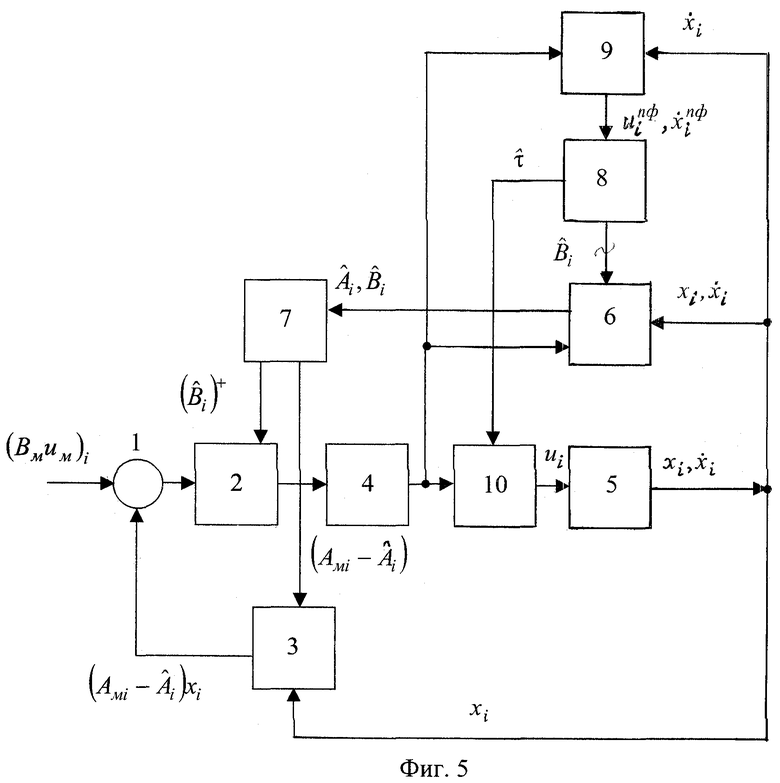
На фиг.5 представлена структурная схема адаптивной системы управления с двухэтапным идентификатором и неявной эталонной моделью.
Структурная схема содержит сумматор 1, первый 2 и второй 3 регуляторы, фильтр 4 низких частот, объект 5 управления, блок 6 второго этапа текущей идентификации, блок 7 настройки регуляторов, блок 8 первого этапа текущей идентификации, блок 9 полосовых фильтров, форсирующее звено 10.
Адаптивная система работает следующим образом. Задающее воздействие в виде сигнала [Вмuм]i подается на первый вход сумматора 1. На второй вход сумматора поступает сигнал  с выхода второго регулятора 3. Выход сумматора связан с первым входом первого регулятора 2, этот регулятор формирует промежуточный закон управления в соответствии с зависимостью
с выхода второго регулятора 3. Выход сумматора связан с первым входом первого регулятора 2, этот регулятор формирует промежуточный закон управления в соответствии с зависимостью

Выход первого регулятора связан с входом фильтра 4 низких частот, настроенного на пропускание диапазона рабочих частот ОУ. Выход фильтра связан с первым входом блока 6 второго этапа текущей идентификации и с первым входом блока 9 полосовых фильтров, а также с первым входом форсирующего звена 10 с передаточной функцией  , р - оператор дифференцирования. Форсирующее звено формирует окончательный вид закона управления (ui), компенсирующего влияние временной задержки управления.
, р - оператор дифференцирования. Форсирующее звено формирует окончательный вид закона управления (ui), компенсирующего влияние временной задержки управления.
Сигнал ui с выхода форсирующего звена поступает на вход объекта управления 5. С выхода объекта управления снимается информация об измеренном значении вектора состояния (xi) и его производнoй  . При отсутствии возможности непосредственного измерения этой производной предполагается наличие соответствующей цифровой обработки сигнала x(t), способной в диапазоне рабочих частот ОУ и ωnф доставить качественную оценку
. При отсутствии возможности непосредственного измерения этой производной предполагается наличие соответствующей цифровой обработки сигнала x(t), способной в диапазоне рабочих частот ОУ и ωnф доставить качественную оценку  .
.
Выход объекта управления связан со вторым входов блока 6 второго этапа текущей идентификации, по которому передаются сигналы хi,  , со вторым входом второго регулятора 3 (передается сигнал xi) и со вторым входом блока 9 полосовых фильтров (передается сигнал
, со вторым входом второго регулятора 3 (передается сигнал xi) и со вторым входом блока 9 полосовых фильтров (передается сигнал  ). Полосовые фильтры выделяют из сигналов управления u(t) и производной
). Полосовые фильтры выделяют из сигналов управления u(t) и производной  (t) составляющие в узком диапазоне частот около частоты выделения каждого фильтра ωnф, формируя сигналы
(t) составляющие в узком диапазоне частот около частоты выделения каждого фильтра ωnф, формируя сигналы  и
и  . Частота ωnф выбирался заранее с учетом удовлетворения соотношений АЧХ собственной динамики объекта и спектра управляющих сигналов по фиг.1, а также удовлетворения известному максимальному значению временной задержки по зависимости (21).
. Частота ωnф выбирался заранее с учетом удовлетворения соотношений АЧХ собственной динамики объекта и спектра управляющих сигналов по фиг.1, а также удовлетворения известному максимальному значению временной задержки по зависимости (21).
С выхода блока 9 полосовых фильтров сигналы  и
и  поступают в блок 8 первого этапа текущей идентификации. В этом блоке вычисляются оценки матрицы эффективности управления
поступают в блок 8 первого этапа текущей идентификации. В этом блоке вычисляются оценки матрицы эффективности управления  и временной задержки управления
и временной задержки управления  по соотношениям (20) и изложенной выше методике. Первая из этих оценок поступает через первый выход блока 8 в блок 6 второго этапа текущей идентификации по его третьему входу, а вторая оценка - через второй выход блока 8 в форсирующее звено 10 по второму его входу.
по соотношениям (20) и изложенной выше методике. Первая из этих оценок поступает через первый выход блока 8 в блок 6 второго этапа текущей идентификации по его третьему входу, а вторая оценка - через второй выход блока 8 в форсирующее звено 10 по второму его входу.
Блок 6 второго этапа текущей идентификации по входным (ui) и выходным (хi,  ) сигналам с объекта управления, известной оценке
) сигналам с объекта управления, известной оценке  , поступающей с блока первого этапа текущей идентификации, формирует текущие оценки параметров матрицы
, поступающей с блока первого этапа текущей идентификации, формирует текущие оценки параметров матрицы  по зависимости (22).
по зависимости (22).
Алгоритмы текущей идентификации блоков 6, 8 относятся к классу алгоритмов типа стохастической аппроксимации, в качестве которого наиболее эффективно использовать рекуррентный метод наименьших квадратов [8].
Выход блока второго этапа текущей идентификации, через который выдаются оценки  и
и  , связан с блоком 7 настройки регуляторов. Этот блок вычисляет матрицы
, связан с блоком 7 настройки регуляторов. Этот блок вычисляет матрицы  и
и  Для реализации псевдообращения матрицы можно использовать метод Гривилля [9]. Первой выход блока 7 связан со вторым входом первого регулятора, по нему передается матрица
Для реализации псевдообращения матрицы можно использовать метод Гривилля [9]. Первой выход блока 7 связан со вторым входом первого регулятора, по нему передается матрица  Второй выход блока 7 связан с первым входом второго регулятора, по нему передается матрица
Второй выход блока 7 связан с первым входом второго регулятора, по нему передается матрица  .
.
Многократно проведенные авторами экспериментальные исследования методами математического моделирования показывают, что двухэтапная организация процесса текущей идентификации позволяет легко обеспечить выполнение условий устойчивости адаптивной системы (см. условия (7), (8)), повысить качество регулирования в системе. Кроме этого, оценка временной задержки в канале управления позволяет расширить область применения адаптивной системы управления на класс систем с неизвестными задержками в канале управления. Все это способствует практическому внедрению адаптивных систем для управления техническими объектами.
Источники информации
1. Буков В.Н., Круглов С.П. Адаптивная система управления с идентификатором и неявной эталонной моделью. - Патент №2108612 от 14.09.94 г. (прототип).
2. Уткин В.Н. Скользящие режимы в задачах оптимизации и управления. - М.: Наука, 1981.
3. Цыпкин Я.З. Основы информационной теории идентификации. - М.: Наука, Гл. ред физ.- мат. лит., 1984.
4. Буков В.Н., Круглов С.П., Решетняк Е.П. Адаптируемость линейной динамической системы с идентификатором и эталонной моделью // Автоматика и телемеханика, 1994, №3, с.99-107.
5. Бронников А.М., Круглов С.П. Упрощенные условия адаптируемости системы управления с идентификатором и эталонной моделью // Автоматика и телемеханика, 1998, №7, с.107-117.
6. Буков В.Н. Пилотажные и навигационные системы Ч. 2. Пилотажные системы. - М.: ВВИА, 1986.
7. Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ./Под ред. Я.З.Цыпкина. - М.: Наука, 1991.
8. Гроп Д. Методы идентификации систем: Пер. с англ. - М.: Мир, 1979.
9. Гантмахер Ф.Р. Теория матриц. - М.: Наука, Гл. ред. физ.-мат. лит., 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2004 |
|
RU2258951C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ ПРИ ВРЕМЕННЫХ ЗАДЕРЖКАХ ИНФОРМАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ | 2001 |
|
RU2192031C1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ | 2002 |
|
RU2251721C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
Изобретение относится к области систем автоматического управления динамическими объектами с неконтролируемыми возмущениями, неизвестными переменными параметрами и временной задержкой в канале управления, у которых диапазон спектра собственных частот контура управления превышает спектр рабочих частот самого объекта. Предполагается, что соотношение диапазонов рабочих частот объекта и спектра управляющих сигналов, а также максимальное значение временной задержки известно. Технический результат заключается в обеспечении задаваемого (с помощью эталонной модели) качества управления в замкнутой системе для объектов указанного класса. Процесс текущей идентификации организуется в два этапа. На первом этапе вычисляются оценки параметров матрицы эффективности управления объекта и временной задержки управления, на втором - оцениваются параметры матрицы собственных динамических свойств объекта. Система содержит сумматор первый и второй регуляторы, фильтр низких частот, объект управления, блок второго этапа текущей идентификации, блок настройки регуляторов, блок первого этапа текущей иденификации, блок полосовых фильтров, форсирующее звено. 5 ил.
Адаптивная система управления с двухэтапным идентификатором и неявной эталонной моделью, содержащая сумматор, первый вход которого подключен к задающему воздействию, а выход - к первому входу первого регулятора, выход которого подключен к входу фильтра низких частот, выход которого подключен к первому входу блока второго этапа текущей идентификации, выход объекта управления подключен ко второму входу блока второго этапа текущей идентификации и к первому входу второго регулятора, выход блока второго этапа текущей идентификации подключен к входу блока настройки регуляторов, первый выход которого подключен ко второму входу первого регулятора, а второй выход ко второму входу второго регулятора, выход которого подключен ко второму входу сумматора, отличающаяся тем, что она дополнительно содержит блок полосовых фильтров, первый вход которого подключен к выходу фильтра низких частот, второй вход к выходу объекта управления, а выход к входу блока первого этапа текущей идентификации, первый выход которого подключен к третьему входу блока второго этапа текущей идентификации, а второй выход ко второму входу форсирующего звена, первый вход которого подключен к фильтру низких частот, а выход - к входу объекта управления.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| RU 96120056 A, 10.01.1999 | |||
| US 4407013 A, 27.09.1983 | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Справочник по теории автоматического управления./Под ред | |||
| А.А.КРАСОВСКОГО | |||
| - М.: Наука, 1987, с.492-495, рис | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

