через последовательно соединенные датчик контролируемого возмущения, первый фильтр низкой частоты и четвертый блок сравнения с вторым входом масштабирующего блока, выход которого соединен с входами третьего блока элементов задержки и вторым входом первого блока сумматоров соединенного третьими входами с соответствующими выходами блока экстраполяторов, выход первого фильтра низкой частоты соединен с вторым 04 входом первого блока элементов задержки, выход третьего блока сравнения соединен с вторыми входами блока экстраполяторов и второго блока элементов сравнения, второй выход третьего блока масштабируюсщх элементов соединен с вторым входом второго блока сравнения , второй выход третьего блока элементов задержки соединен с вторым входом третьего блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления объектом с несколькими управляющими входами | 1985 |
|
SU1287105A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Прогнозирующий регулятор | 1979 |
|
SU815713A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
АДАПТИВНАЯ СИСТЕМА УПРАВ- , ЛЕНИН АГЛОМЕРАЦИОННОЙ УСТАНОВКОЙ, содержащая первый фильтр низкой частоты, последовательно соединенные первый блок элементов сравнения, первый блок масшатабирующих , элементов, сумматор, исполнительный элемент, объект управления, датчик выходной величины, первый блок сравнения, второй фильтр низкой частоты, обратную модель объекта управления, второй блок сравнения ц третий блок сравнения, вход которого через блок адаптации соединен с масштабирующим блоком, вто,рой вход которого соединен с втор1ям входом блока адаптации, последовательно соединенные третий фильтр низкой частоты и первый блок элементов задержки и последовательно соединенные блок экстрапойяторов, второй блок элементов задержки, второй блок элементов сравнения и блок элементов адаптации, выходы которого соединены с соответствующими первыми входами блока экстраполятороБ, второй вход первого блока сравнения соединен с выходом первого задатчика, отличаю. щ а я с я тем, что, с целью повышения точности системы, она содержит второй блок масштабирующих элементов, датчик управляющего воздействия, датчик контролируемого возмущения, последовательно соединенные 3 второй задатчик и четвертый блок сравнения, последовательно соединенные третий блок элементов задержки и первый блок сумматоров и последовательно соединенные второй блок сумматоров, третий блок масштабирующих элементов и -третий блок сумматоров, второй вход сумматора соединен с первыми входами второго блока сумматоров, а через последовательно соединенные второй блок маспгтабирующих элементов и третий блок сумматоров - с соответствующими первыми входами первого блока элементо1з сравнения, выходы первого блока элементов задержки соединены с соответствующими вторыми входами второго блока сумматоров, выход исполнительного элемента соединен через последовательно соединенные датчик управляющего воздействия и третий фипьтр низкой частоты с вторым входом первого блока элементов сравнения, второй вход объекта управления соединен
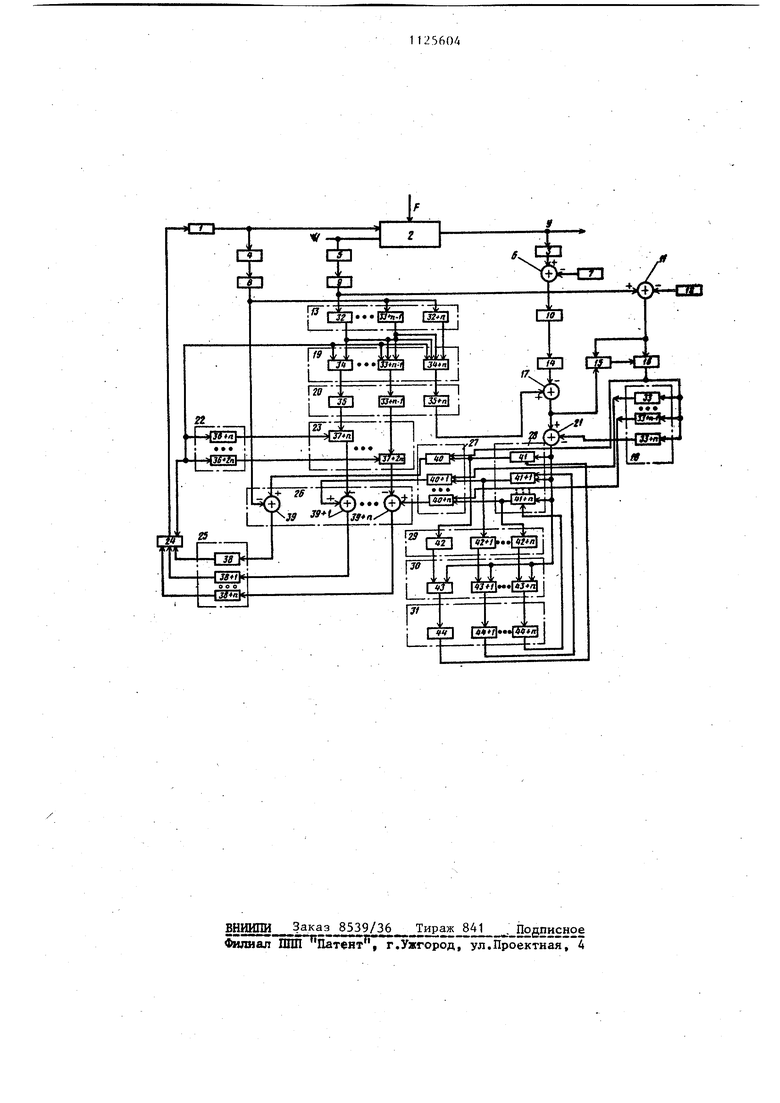
Изобретение относится к области автоматического управления и регулирования и может быть использовано для построения сист управления технологическими ооъектами. Передаточная функция каналов ре гулирования рассматриваемого класс .объектов имеет вид W(p1 - U-e;n, CD где 2 - время пребывания обрабатываемого материала в объект R - коэффициент передачи. Эта. передаточная функция соответствует интегральному (ингегриру ющему)звену с отсечкой. Такого ро да модель хорошо аппроксимирует ка налы контроля и регулирования многих промышленных объектов с ограниченной длительностью переходньгх процессов. i Во временной области передаточной функции (1) соответствует интегральное уравнение (9.d(9 (2) где Ту - изменение .приращение) вы ходной величины объекта в ответ на изменение управляющего воздействия Ь . Например, при нагреве металла управляющим воздействием служит те пература рабочего пространства печи по ее длине, а выходной величиной - температура металла на вьпсоде из печи, при спекании агломерационной шихты управляющим воздействием - скорость движения аглоленты, а выходной величиной - степень допекания шихты в установленном месте на конечном участке аглоленты. Объект управления подвержен влиянию контролируемых и неконтролируемых внешних воздействий. Характеристики объекта по отношению к контролируемым внешним воздействиям изменяются существенно. Статистические характеристики самих внешних воздействий также являются нестационарными . Задача управления заключается в обеспечении инвариантности регулируемой координаты от контролируемых и неконтролируемых внешних воздействий. Известна система управления описанного класса объектов, например, агломерационной установки, включающая объект управления, последовательно соединенные датчик выходной величины объекта управления, блок сравнения, регулятор с пропорци- онально-интегрально-дифференциальным законом регулирования, исполнительный элемент, задатчик требуемого значения выходной величины объекта, подключенный своим выходом к входу блока сравнения lj . Недостаток этой системы заключается в низкой точности регулирования, обусловленный тем, что применяемый регулятор с пропорционально-интегрально-дифференциальным заоном регулирования не учитывает . . специфики объекта управления с нестационарными возьтущениями и каналами регулирования в ввде интеграль ного звена с отсечкой. Наиболее близким к изобретению по принципу построения является прогнозирующий регулятор, содержащий первый фильтр низкой частоты, последовательно соединенные первый блок элементов сравнения, первый, блок масштабирующих элементов, сум матор, исполнительный элемент, объект управления, датчик выходной величины, первый блок сравнения, второй фильтр низкой частоты, обратную модель объекта управления, второй блок сравнения и третий блок сравнения, вход которого через блок адаптации соединен с первым масштабирующим блоком, второй вход которого соединен с вторым входом блока адаптации, последовательно соединенные третий фильтр низкой частоты и первый блок элементов задержки и после довательно соединенные блок экстраполяторов, второй блок элементов задержки, второй блок элементов сра нения и блок элементов адаптации, выходы которого соединены с соответствующими первыми входами блока экстраполяторов, второй вход перврго блока сравнения с выходом первого задатчика. В прогнозирующем регуляторе с помощью первого и второго блоков сравнения, первого блока задержки, первого фильтра низкой частоты и обратной модели объекта восстанавливаются с запаздыванием оценки идеальных управляющих воздействий. Затем эти оценки пересчитываются на базовые условия контролируемых внешних воздействий Приведенные,таким образом оценки идеальных управляющих воздействий экстраполируются по программе с помощью первого и второго экстраполятора. Экстраполированное управляющее воздействие на предстоящий I момент управления корректируется в зависимости от разности между факти чески реализованным и идеальным управлением и между фактически реализованным и экстраполированными оценками идеального управления. Скорректированные управляющие воздействия пересчитываются на условия фактических контролируемых внеш них воздействий, для чего вводится 04 . 4 связь масштабирующего блока с сумматором. Полученное на выходе сумматора управляющее воздействие реализуется исполнительным органом. Для повьпаения эффективности прогнозирующего регулятора вводится адаптация параметров экстраполяторов с помощью блоков задержки, сравнения и адаптации, а также коэффициента масштабирующего блока с помощью блоков сравнения и адаптации 2 . Недостатками известного прогнозирующего регулятора при его приме.нении для рассматриваемого класса объектов являются большая- сложность или практическая нереализуемость блока обращения передаточной функции типа (1), так как ее обратный оператор :--т-г-- -г содержит К V I - 6 } дифференциатор., охваченный запаздывающей положительной обратной связью, и низкая точность регулирования из-за неучета ограниченн.ой длительности переходного процесса в объекте с каналом регулирования в виде интегрального звена с отсечкой. Целью изобретения является расширение функциональных возможностей и по вьш1ение точности регулирования. Поставленная цель достигается тем, что адаптивная система управления агломерационной установкой содержит второй блок масштабирующих элементов, датчик управляющего воздействия, датчик контролируемого возмущения, последовательно соединенные второй задатчик и четвер- тый блок сравнения, последовательно соединенные третий:блок элементов задержки и первьй блок сумматоров и последовательно соединенные второй блок сумматоров, третий блок масштабирующих элементов и третий блок сумматоров, второй вход сумматора соединен с первыми входами второго блока сумматоров, а через последовательно соединенные второй блок масштабирующих элементов и третий блок сумматоров - с соответствующими первыми входами первого блока элементов сравнения, выходы первого блока элементов задержки соединены с соответствующими вторыми входами- второго блока сумматоров, выход исполнительного элемента соединен через последовательно соединенные датчик управляющего воздействия и третий фильтр низкой частоты с вторым входом первого блока элементов сравнения, второй вход объекта управления соединен через последовательно соединенные датчик контролируемого возмущения,, первый фильтр низкой частоты и четвертый блок сравнения с вторым входом масштабирующего блока, выход которого соединен с входами третьего блока элементов задержки и вторым входом первого блока сумматоров, соединенного третьими входами с соответствующими выходами блока экстраполяторов, выход первого фильтра низкой частоты соединен с вторым входом первого блока элементов задержки, выход третьего блока сравнения соединен с вторыми входами блока экстраполяторов и вто рого блока элементов сравнения, второй выход третьего блока масштабирующих элементов соединен с вторым входом второго блока сравнения, второй выход .третьего блока элементов задержки соединен с вторым входом третьего блока сравнения С помощью первых блоков элементов задержки, второго блока сумматоров и третьего блока масштабирующих элементов находятся интегральные управляющие воздействия для раз личных конечных П участков объекта управления. В частности, для агломе рационной установки это путь, пройденный определенной порцией шихты до текущего момента времени. Для ма териала, вышедшего из объекта, восстанавливается идеальное интегральное управляющее воздействие. Однако при оперировании с, интегральными управлениями уже требуется обратньй .оператор не динамической модели типа (1), а статической модели в виде пропорционально звена. Изменения контролируемых возмущений пересчитываются в изменения интегральных управляющих воздействий, траектория которых запоминается с помощью третьих блоков элементов задержки. Из идеального интегрального управляющего воздействия в третьем блоке сравнения исключается эффект изменения контролируемых возмущений, Полученное таким образом приведенное управление экстраполируется в виде траектории на интервал време 046 ни длительностью о . Затем траектория экстраполированного управления пересчитывается в первом блоке сумматоров на условия фактических контролируемьк возмущений, Р результате чего получается траектория требуемых интегральных управлений. Далее цикл каждого конечного участка объекта управления рассчитывается интегральное управление, которое было бы при условии реализации текущего управляющего воздействия в последующие моменты времени до прохождения материалом объекта управления, С этой целью вводятся второй блок масштабирующих элементов и третий блок сумматоров. Из полученной траектории интегральных управляющих воздействий вычитается траектория требуемых управлений. Полученные разности траекторий; пересчитываются в корректировки текущих управляющих воздействий и с весовыми коэффициентами алгебраически подсз ммируются к текущему значению управляющего воздействия. Результат суммирования является выработанным управлением, которое направляется на реализацию в исполнительный элемент. I На чертеже приведена блок-схема предлагаемой системы управления. Адаптивная система управления агломерационной установкой содержит исполнительный элемент 1, объект 2 управления, датчик 3 выходной величины, датчик 4 управляющего воздействия, датчик 5 контролируемого возмущения, первый блок 6 сравнения, первый задатчик 7, третий 8, первый 9 и второй 10 фильтры низкой частоты, четвертый блок 11 сравнения, второй задатчик 12, первый блок 13 элементов задержки, обратную модель 14 объекта управления, блок 15 адаптации, масшатибрующий блок 16, второй блок 17 сравнения, третий блок 18 элементов задержки, второй блок 19 сумматоров,- третий блок 20 масштабирующих элементов, третий блок 21 сравнения, второй блок 22 масштабирующих элементов, третий блок 23 сумматоров, сумматор 24, первый блок 25 масштабирующих элементов, первый блок 26 элементов сравнения, первый блок 27 сумматоров, блок 28 экстраполяторов, вторые блоки 29 элементов задержки, второй блок 30 элементов сравнения, блок 31 элементов адаптации , Первый блок 13 содержит (и+1) элементов задержки от 32-го до (32+П)-го включительно, третий блок 18 содержит (п+1) элементов задержки от 33-го до (33+И)-го включительно, второй блок 19 содер жит (П+1) сумматоров от 34-го до (34+h)-ro включительно, третий бло 20 содержит (п+1) масштабирующих элементов от 35-го до (35+п)-го включительно, второй блок 22 содер жит h масштабирующих элементов от (36-«-h)-ro до (36+2h)-ro включительно, третий блок 23 содержит п сумматоров от (37+и)-го до (37+2п) го включительно, первый блок 25 со держит (п+1) масштабирующих элемен тов от 38-го до (38+П)-го включительно, первый блок 26 содержит (tl + 1) элементов сравнения от 39-го до (39+11)-го включительно, первый блок 27 содержит (и+1) сумматоров от 40-го до (40+П)-го включительно блок 28 содержит (п+1) экстраполяторов от 41-го до (41+п)-го включительно, второй блок 29 содержит (Ц+1) элементов задержки от 42-го до (42+П)-го включительно, второй блок 30 содержит (п+1) элементов сравнения от 43-го до (43+и)-го включительно, блок 31 содержит (tl+1) элементов адаптации от 44-го до (44+И)-го включительно. Кроме того, V - управляющее воздействие; W - контролируемое возмущение; F - неконтролируемое возмущение; У - выходная величина (регулируемая координата) объекта управления Предлагаемая х-.истема работает следующим образом. Выходная величина У объекта 2 у равления измеряется датчиком 3 выходной величины, с выхода которого сигнал подается на первый блок 6 него вычитается сравнения, где из заданном значении У высигнал о ходной величины, поступающий с выхода первого задатчика 7. Полученный сигнал идет на второй фильтр 1 низкой частоты, представляющий соб помехозащищенный управляемый фильт Во втором фильтре 10 низкой частот срезаются отдельные большие выброс подавляется высокочастотная состав ляющая сигнала, что повышает точность его дальнейшего преобраэова4С выхода второго фильтра 10 низкой частоты сигнал поступает на обратную модель 14 объекта управления в виде масштабирующего блока с коэффициентом равным --- , где К статический коэффициент усиления. На выходе обратной модели 14 объекта управления получается сигнал о корректировк.е а Иц интегрального управления. Управляющее воздействие измеряется датчиком 4управляющего воздействия и через третий фильтр 8 низкой частоты поступает на входы пер-, вого блока 13 элементов задержки. Число элементов задержки равно (11 + 1) по числу интервалов разбиения времени пребывания материала в объекте. В практических случаях (п+1) 10 - 20. Третий фильтр 8 низкой частоты настраивается таким образом, чтобы усреднить значения сигнала об U на интервале Д Т В блоке элемента 32 задержки сигнал задерживается на интервал времени Лс , в блоке элемента (32+П-1) задержки - на интервал времени п- ы- , в блоке элемента (32+iri) задержки - на интервал времени (п +1)ut, т.е. на выходе блока элемента 32 задержки получается сигнал об управляющем воздействии для порции материала, которая находится в объекте управления интервал времейи u1, на выходе блока элемента (32+ +П-1) задержки - для порции материала, которая находится в объекте времяп-л и подходит в текущий-Момент к выходу -объекта управления, ча выходе блока элемента. (32+11) задержки - для порции материала, выходящего из объекта управления. Сигналы с выходов первого блока 13 элементов задержки поступают на входы второго блока 19 сумматоров. Кроме того, на входы второго блока 19 сумматоров,сигнал с выхода третьего фильтра 8 низкой.частоты о текущем управляющем воздействии. В сумматоре 34 суммируются два сглаженных сигнал а II (t) ии({-иЛ), в сумматоре () - (п+1) сигнал:и(-t), U(t + + ),... и и (1+ n.ui); в сумматоре (34+п) - (п+2) сигнала: U (t), U (t + + u1),..., U (Ь +ut), + (n + 1) -лг . С выходов второго блока 19 сумматоров 9 сигналы поступают на входы третьего блока 20 масштабирующих элементов, где умножаются на величину и . б ре зультате на выходе масштабирующего элемента 35 получается сигнал об ин тегральном управляющем воздействии для порции материала, которая находится на объекте время Д , на выходе масштабирующего элемента (35+П1) - для порции материала, которая находится в объекте время n-fil , и на выходе масштабирующего элемента (35+ц) - для порции материала, выходящего из объекта управления. В частности, для агломерационной установки интегральным управлением яв ляется путь, пройденный каждой порцией материала к текущему моменту времени. Сигнал об интегральном управлени для выходящей из объекта управления порции материала с выхода масштабирующего элемента (35+П) подается на вход второго блока 17 сравнения, гд из него вычитается сигнал, поступающий с выхода обратной модели 14 объекта управления. Выходной сигнал второго блока 17 сравнения является оценкой идеаль- кого интегрального управления Uy для вьшедщей из объекта порций материала, т.е. такого интегрального управления, которое следует реа лизовать на предистории, чтобы получить выходную величину объекта, рав ную заданному значению. В формульйом выражении u;fNvuaML vu:iv fl. где и|,° и (t,j) - оценка идеального интегрального управления в t -и мо мент времени для j-ой порции материала;у ц (tji)- фактическоеинтег гральное управление;Y(t,j),{t)- фактическое и заданное значения выходной величины )l) сглаженное значение ошибки регулирования; ; статический коэффициент усиления. 0410 Контролируемое вoзмyщeнt eW измеряется датчиком 5 контролируемого возмущения и полученный сигнал через первый фильтр 9 низкой частоты подается на вход четвертого блока 11 сравнения, где из него вычитается сигнал W об опорном уровнеW, поступающий с выхода второго задатчика 12. С выхода четвертого блока 11 сравнения сигнал о приращениях (изменениях) контролируемого возмущения (i1-VJ itV (4) поступает на вход масштабирующего блока 16, где пересчитывается в изменения интегральных управляющих воздействий. Полученный сигнал подается на вход третьего блока 18.элементов задержки, где задерживается на интервал времени Д в элементе 33 задержки, на интервал времени в элементе (ЗЗ+п-1) задержки, на интервал времени (h + D-uL - в зшементе (33+п) задержки.С выхода элемента(33+п) задержки сигнал поступает на вход третьего блока 21 сравнения и вычитается из сигнала О (t,) подаваемого с выхода второго блока 17. сравнения. Тем самым из сигнала 11 исключаются эффекты изменений контролируемого возмущения, что позволяет производить более точную экстраполяцию эффектов неконтролируемых воз 1ущений. Расчитанный таким образом сигнал подается на вход блока 28 экстраполяторов, например, в виде форсирзтощих звеньев, и экстраполируется в экстраполяторе 41 на интервал времени Пй), в экстраполяторе (41 + 1) - на интервал времени (п-1)- ft , в экстраполяторе (41+и) - на интервал времени йИ . Экстраполированные в виде траектории оценгг-г управлений пересчитываются с опорного на фактические значения контролируемых возмущений. Для этого в первом блоке 27 сумматоров суммируются сиг- налы, поступающие с выходов треть- его блока 18 элементов задержки, за исключением элемента (33+ft) задержки, и с выходов блока 28 экстраполяторов. Выходной сигнал суммирования первого блока 27 сумматоров является сигналом о требуеимых интегральных, управлениях для каждой порции материала. Далее определяется разность между требуемыми интегральными управлениями и интегральными управленит ями, которые были бы для каждой пор ции материала при условии, что оставшееся время пребывания в объекте на нее воздействует текущее управляющее воздействие. Для агломерационной установки под таким интегральным управлением понимается путь, который проходит порция материала по всей аглоленте, если остав шееся время нахождения на ней .она двигается со скоростью, которая име ет место в текуш}1й момент времени. С этой целью сигнал о текущем уп равляющем воздействии подается на входы второго блока 22 масштабирующ,их элементов. В масштабирующем эл менте (36+и) он умножается на величину п u1 , и тем самым прогнозируется часть интегрального управления для порции материала, которая находится в объекте время и , з масштабирующем элементе (36+2п) - на величину ut , и тем самым прогнозируется часть интегрального управления для порции материала, которая нахо.дится в объекте время П- л . Выходные сигналы второго блока 22 масшта бирующих элементов поступает на вхо ды третьего блока 23 сумматоров, гд они суммируются с сигналами, поступающими с выходов третьего блока 20 масштабирующих элементов, за исключением последнего из них (35+fi)-ro. На входы первого блока 26 элементов сравнения с выходов третьего блока 23 сумматоров подаются сигналы о спрогнозированных интегральных управлениях, из которых вычитаются сигналы о требуемых, интегральных управлениях, поступающих с выходов первого блока сумматоров. Кроме того, в 39-ом элементе сравнения из сигнала, идущего с выхода третьего фильтра 8 низкой частоты, вычитается сигнал с выхода 40-го сумматора. Сигналы о полученных разностях поступают на вход первого блока масштабирующих элементов и умножаются на коэффициенты, с помощью которых интегральные управления пересчитываются в текущие управления и взвешиваются управления для каждой порции материала, например, по эк4 . 12 споненциальному закону, причем больший вес придается порциям метериала, находящимся ближе к выходу объекта управления. В масштабирующем элементе 38 сигнал умножается на коэффициент . . . i; . (5) в котором d, - весовой коэффициент. Составляющая - отражает, что разh ut ность между прогнозируемым и требуемым интегральными управлениями компенсируется текущим управляющим воздействием на оставшемся интервале времени Irtit пребывания материала в объекте. В масштабирующем элементе (38+1) сигнал умножается на коэффициент сЗ ,j 7ri7vT,;-, в масштабирующем элементе (38+п) - на коэффициI 1 ент бп причем Z (i 1. й 1-1 Сигналы с выходов вторых масштабирующих элементов блока 25 подаются на входы сумматора 24, куда поступает также сигнал с выхода третьего фильтра В низкой частоты. На выходе сумматора 24 получается сигнал о текущем управляющем воздействии, который подается на реализацию на вход исполнительного элемента 1. Выходной сигнал исполнительного элемента 1 подается на вход объекта 2 управления. Изменчивость характеристик объекта 2 управления по отношению к измеряемым внешним воздействиям учитывается путем адаптации пересчетного коэффициента ky масштабирующего блока 16. Для этого на входы блока 15- адаптации подаются сигналы с выхода второго блока 17 сравнения и выхода масштабирующего блока 16. В блоке 15 адаптации реализуется, в частности, следующая процедура: ,. ) (6) k (4-1-1 vfwMe) VA ., где L - интервал времени интегрирования ; Ы (t) - приращения контролио емых возмущений; опорное значение идеального интегрального управления ; У - постоянный коэффициент, С выхода блока 15 адаптации сигнал поступает на дополнительный вход масштабирующего блока 16, Нестационар.ность статистических характеристик неконтролируемых возмущений F учитывается с помощью блока 31 элементов адаптации. При условии, что оператор экстраполятс ра представлен в виде w(p)-.|i±:i, ..VRI- интеграл экстраполяции; Тя) - постоянная времени форсирующего звена, в блоке 31 элементов адаптации реализуется, например, следующая процедура: . KuU Ple tsO-j )ci (9) , - B+ jy9ld{e)(9 ()-uie), гдёи РСв)- выходной сигнал третьего блока 21 сравнеи (9) - выходной сигнал экстраполятора;AjB,d - постоянные величины. 4 Для адаптации параметров блока 28 экстраполяторов сигнал с их выходов подается на второй блок 29 элементов задержки. В элементе 42 задержки сигнал задерживается на интервал времени Л-й , в элементе (42+1) задержки - на интервал времени (n-Db, в элементе (42+п) задержки - на интервал времени 2 . С выходов вторых блоков 29 элементов задержки сигналы поступают на первые, входы второго блока 30 элемента сравнения, где вычитаются из сигнала, поступающего на другие входы с выхода третьего блока 21 сравнения. Выходные сигналы -второго блока 30 элементов сравнения.поступают на входы блока 31 элементов адаптации, выходные сигналы которьпс идут на дополнительные входы блока 28 экстраполяторов. Применение предлагаемой адаптивной системы для регулирования степени допекания шихты на агломерационной установке позволит, как показывают результаты имитационного моделирования, получить экономический эффект порядка 200 .тыс. руб. в год на одну агломерационную установку за счет увеличения производительности йа 1 ,.5%,повышения качества агломерата на 10% и экономии коксита на 1 кг/т агломерата.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления агломерационной установкой с подвижной решеткой ....устройство для его осуществления | 1975 |
|
SU546287A3 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ЗАЖИГАНИЕМ | 2016 |
|
RU2702901C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
