Изобретение относится к транспортным средствам с движителями, не взаимодействующими с дорогой, и может быть использовано для доставки полезного груза по пересеченной местности.
Известны беспилотные наземные транспортные средства с дистанционным управлением (Rotundus GroundBot, http://www.gizmag.com/rotundus-groundbot/20259/: US 6702050 B1, 23.09.2002), состоящие из сферического или эллипсовидного корпуса внутри которого размещен движитель в виде маятникового механизма с электроприводом на аккумуляторных батареях. Движение осуществляется путем изменения положения центра масс транспортного средства в направлении перемещения. Внутри корпуса размещены также системы передачи данных и управления. Снаружи корпуса размещается полезная нагрузка: видеокамера, датчики физических и химических процессов. Указанные средства могут применяться в военной и гражданской областях для ведения разведки или доставки грузов и боеприпасов.
Недостатками указанных устройств являются недостаточная скорость движения по пересеченной местности и низкая проходимость, связанная с взаимодействием тяжелого транспортного средства с препятствиями на поверхности земли.
Известны также транспортные средства (spherical flying machine, http://www.diginfo.tv/2011/10/24/11-0229-r-en.php: US 6976899 B1, 25.012002; US 4505346, 29.03.1982), корпус которых имеет сферическую каркасную конструкцию, а в качестве движителя применяется воздушный винт с электроприводом. Движитель находится внутри корпуса на кардановом подвесе, а направление движения транспортного средства определяется положением соединенных с движителем и системой управления аэродинамических поверхностей. Если ось вращения воздушного винта направлена перпендикулярно земле и он создает достаточную тягу, то транспортное средство можно использовать как летательный аппарат. Если ось вращения воздушного винта наклонена к земле и тяги воздушного винта недостаточно для преодоления силы тяжести транспортного средства, то оно катится по земной поверхности.
Недостатком этих устройств является низкая управляемость вследствие малой эффективности и инерционности аэродинамических управляющих поверхностей, особенно при малых скоростях вращения воздушного винта.
Наиболее близким аналогом, прототипом настоящего изобретения, является беспилотный летательный аппарат с вертикальной подъемной силой (US 723195 В1, 25.09.2007), содержащий корпус шарообразной формы, состоящий из гибких стержней, соединенных между собой и образующих сетчатую конструкцию, два коаксиальных несущих винта с противоположным направлением вращения, двигатель для вращения несущих винтов, электрический аккумулятор, аппаратуру управления и связи, отсек для размещения полезной нагрузки, шасси с четырьмя колесами и систему управления движением по земле и в воздухе. Устройство имеет возможность взлетать и садиться по командам оператора или бортовой системы управления, а также перемещаться по земле в заданном направлении на колесах.
Недостатком этого устройства является недостаточная скорость движения по пересеченной местности и низкая проходимость, связанная с взаимодействием колес шасси транспортного средства с препятствиями на поверхности земли.
Задачей заявляемого изобретения является повышение дальности применения, проходимости и скорости движения транспортного средства по пересеченной местности.
Поставленная задача решена благодаря тому, что транспортное средство повышенной проходимости, содержащее корпус сферической формы, состоящий из гибких стержней, соединенных между собой соединительными креплениями и образующих сетчатую конструкцию, два коаксиальных несущих винта с противоположным направлением вращения, источник энергии, двигатель и редуктор для привода коаксиальных несущих винтов, аппаратуру связи и систему управления движением по земле и в воздухе, дополнительно содержит диаметральную ось качения, выходящую за пределы сферического корпуса и соединяющуюся с корпусом с помощью шарниров, на самой оси расположены винты с приводом, причем винты расположены сверху и снизу диаметральной оси качения, внутри корпуса ось соединена с подвесом, несущим полезную нагрузку, а снаружи корпуса ось жестко соединена с дугой, на которой вверху располагается площадка для крепления специальной аппаратуры, на сферический корпус жестко установлены два обруча перпендикулярно диаметральной оси качения.
Несущие винты оборудованы автоматами перекоса, позволяющими путем изменения общего и циклического шага винтов управлять вектором создаваемой ими аэродинамической силы и моментами относительно оси вращения винтов. Система управления, воздействуя на автоматы перекоса, создает с помощью винтов вертикальную составляющую аэродинамической силы, которая позволяет, как компенсировать вес всего устройства, так и поднимать его в воздух. Горизонтальная же составляющая аэродинамической силы, заставляет устройство катиться или лететь в заданном направлении. Изменения результирующего момента относительно оси вращения винтов заставляют транспортное средство менять направление движения путем воздействия на корпус через диаметральную ось качения. Ось вращения несущих винтов поддерживается в вертикальном положении весом привода и полезной нагрузки, расположенных ниже геометрического центра корпуса, а также системой управления несущими винтами.
Изобретение позволяет повысить проходимость транспортного средства за счет компенсации его веса и возможности облетать препятствия. Изобретение также позволит увеличить скорость движения и дальность применения транспортного средства за счет возможности качения по пересеченной местности благодаря пропульсивной силе винтов и большому диаметру сферического корпуса.
Изобретение поясняется фигурой, на которой изображен общий вид транспортного средства повышенной проходимости.
На рисунке (фиг.) показан внешний вид транспортного средства повышенной проходимости, содержащего корпус 1 сферической формы, состоящий из гибких стержней 2, соединенных между собой соединительными креплениями 3, гибкие стержни 2 соединены также с двумя шарнирами 4. Корпус 1 представляет собой сферическую сетчатую конструкцию, размер ячеек которой зависит от полезной нагрузки (на фиг. не показана), количества гибких стержней 2 и диаметра самого корпуса 1. Сетчатая конструкция необходима для свободного прохождения через ячейки потока воздуха, уменьшения аэродинамического сопротивления всей конструкции и защиты лопастей несущих винтов. Гибкие стержни 2 и соединительные крепления 3 придают корпусу 1 прочность и упругость. Через шарниры 4 проходит диаметральная ось качения 5, на которой по центру неподвижно закреплены привод 6, состоящий из источника энергии, например аккумуляторной батареи или емкости с топливом, двигателя, например электродвигателя или двигателя внутреннего сгорания, редуктора (на фиг. не показаны), передающего вращение на несущие винты 7. Два коаксиальных несущих винта 7 с противоположным направлением вращения имеют каждый не менее двух лопастей и свой автомат перекоса (на фиг. не показан). Несущие винты 7 расположены снизу и сверху диаметральной оси качения 5. Автомат перекоса позволяет менять угол установки лопастей несущих винтов 7. Аппаратура связи и система управления движением по земле и в воздухе (на фиг. не показаны) находится вместе с приводом 6 на диаметральной оси качения 5. На этой же оси, внутри корпуса 1, закреплены штанги 8, соединенные внизу с подвесом 9 в виде сетки или решетки для размещения полезного груза, а снаружи корпуса 1 диаметральная ось качения 5 жестко соединена с дугой 10, на которой вверху располагается площадка 11 для крепления специальной аппаратуры 12. Диаметральная ось качения 5, с установленным на ней оборудованием, штанги 8, подвес 9 с полезной нагрузкой и дуга 10 со специальной аппаратурой 12 обеспечивают вертикальное положение несущих винтов 7 независимо от положения корпуса 1. На корпус 1 сверху установлены и жестко прикреплены два обруча 13 перпендикулярно диаметральной оси качения 5. Специальная аппаратура 12 соединена с аппаратурой связи и системой управления движением по земле и воздуху многожильным кабелем (на фиг. не показан), проходящим внутри полой дуги 10 и полой диаметральной оси качения.
Транспортное средство повышенной проходимости работает следующим образом. Для транспортировки к месту применения устройство может находиться в разобранном виде, при этом отдельно перевозятся гибкие стержни 2 с соединительными креплениями 3; подвес 9 со штангами 8 и полезной нагрузкой, дуга 10 с площадкой 11 и специальной аппаратурой 12, диаметральная ось качения 5 со смонтированными на ней шарнирами 4, приводом 6, несущими винтами 7, аппаратурой связи и системой управления движением по земле и в воздухе; обручи 13.
Перед применением устройство собирается путем жесткого крепления гибких стержней 2 к шарнирам 4. Сами гибкие стержни 2 соединяются между собой соединительными креплениями 3, предварительно поместив внутрь подвес 9 с закрепленной на нем полезной нагрузкой и со штангами 8 прикрепленными к диаметральной оси качения 5. На собранный корпус 1 устанавливаются обручи 13 и закрепляются на гибких стержнях 2 соединительными креплениями 3. Затем снаружи корпуса 1 на диаметральную ось качения 5 жестко крепится дуга 10 с площадкой 11. На площадку 11 крепится специальная аппаратура 12. После применения устройство может быть разобрано в обратном порядке.
После запуска двигателя и раскрутки несущих винтов 7 появляется возможность управления аэродинамической подъемной силой посредством изменения общего шага несущих винтов 7 с помощью автоматов перекоса. Подъемная сила позволяет не только скомпенсировать общий вес устройства, но и поднять его в воздух на определенную высоту. Управляя циклическим шагом несущих винтов 7 с помощью автоматов перекоса, можно создать пропульсивную аэродинамическую силу для движения устройства в заданном направлении. Если подъемная аэродинамическая сила будет меньше веса всей конструкции, то транспортное средство повышенной проходимости будет катиться по земле. Обручи 13 повышают устойчивость транспортного средства при движении по земле и остановках.
Повышенная проходимость достигается за счет применения сферического корпуса 1, уменьшения давления корпуса на земную поверхность, уменьшения силы взаимодействия корпуса с грунтом и водной поверхностью благодаря гибким стержням 2 и двум обручам 13. Если подъемная аэродинамическая сила будет больше веса всей конструкции, то транспортное средство поднимется в воздух или покатится вверх по наклонной поверхности, например по стене здания. Скорость движения транспортного средства повышенной проходимости возрастает за счет отказа от применения шасси, т.к. само устройство является «колесом». Увеличения дальности действия происходит благодаря экономичному режиму работы привода 6 и несущих винтов 7. Для катящегося устройства в отличие от летящего не требуется создания большой аэродинамической подъемной силы и, следовательно, большого расхода энергии источником питания.
Транспортное средство повышенной проходимости несет полезную нагрузку, закрепляемую на подвесе 9, в качестве которой могут быть, например, миноискатель, анализатор радиационной и химической обстановки, заряд взрывчатого вещества. Для управления движением предусмотрено размещение на площадке 11 специальной аппаратуры 12, в качестве которой могут быть системы наблюдения в оптическом диапазоне, антенны системы связи и передачи данных, спутниковая навигационная система.
Транспортное средство повышенной проходимости может иметь разные размеры в зависимости от назначения: от самых маленьких, для наблюдения в условиях городской застройки и в горах, до самых больших, для доставки тяжелых грузов в условиях тундры и преодоления трещин в арктических льдах. В первом случае транспортное средство управляется дистанционно, а в последнем случае кабина экипажа может быть размещена, например, на площадке 11.
Применение транспортного средства повышенной проходимости позволит повысить дальность применения, проходимость и скорость движения по пересеченной местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВОЗДУШНОГО НАБЛЮДЕНИЯ | 2010 |
|
RU2428355C1 |
| СИСТЕМА ДЛЯ ПОИСКА И ОБНАРУЖЕНИЯ МИН | 2011 |
|
RU2485556C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2403182C1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2429166C1 |
| СПОСОБ ПОСАДКИ СВЕРХЛЕГКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2307047C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВКИ ПО ВОЗДУХУ ТЯЖЕЛЫХ ГРУЗОВ | 2010 |
|
RU2449924C1 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2555086C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| СКОРОСТНОЙ ВИНТОКРЫЛ | 2013 |
|
RU2539679C1 |
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 2023 |
|
RU2822072C1 |
Изобретение относится к конструкциям транспортных средств. Транспортное средство повышенной проходимости содержит корпус сферической формы, состоящий из гибких стержней, соединенных между собой соединительными креплениями и образующих сетчатую конструкцию, два коаксиальных несущих винта с противоположным направлением вращения, источник энергии, двигатель и редуктор для привода несущих винтов, аппаратуру связи и систему управления движением по земле и в воздухе, диаметральную ось качения, выходящую за пределы сферического корпуса и соединяющуюся с корпусом с помощью шарниров. На указанной оси расположены винты с приводом, причем винты расположены сверху и снизу диаметральной оси качения. Внутри корпуса ось соединена с подвесом, несущим полезную нагрузку, а снаружи корпуса ось жестко соединена с дугой, на которой вверху располагается площадка для крепления аппаратуры. На сферический корпус жестко установлены два обруча перпендикулярно диаметральной оси качения. Достигается повышение проходимости и скорости движения по пересеченной местности. 1 з.п. ф-лы, 1 ил.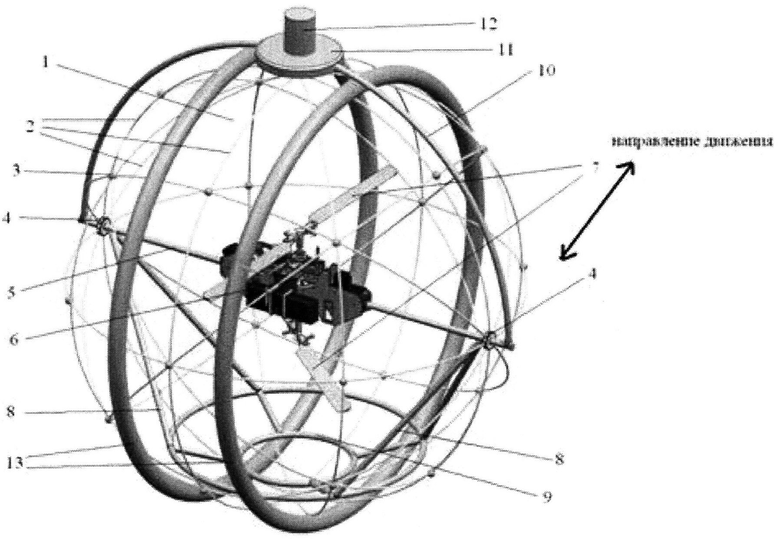
1. Транспортное средство повышенной проходимости, содержащее корпус сферической формы, состоящий из гибких стержней, соединенных между собой соединительными креплениями и образующих сетчатую конструкцию, два коаксиальных несущих винта с противоположным направлением вращения, источник энергии, двигатель и редуктор для привода несущих винтов, аппаратуру связи и систему управления движением по земле и в воздухе, отличающееся тем, что оно содержит диаметральную ось качения, выходящую за пределы сферического корпуса и соединяющуюся с корпусом с помощью шарниров, на самой оси расположены винты с приводом, причем винты расположены сверху и снизу диаметральной оси качения, внутри корпуса ось жестко соединена с дугой, на которой вверху располагается площадка для крепления аппаратуры.
2. Транспортное средство по п.1, отличающееся тем, что на сферический корпус жестко установлены два обруча перпендикулярно диаметральной оси качения.
| US 6976899 B1, 20.12.2005 | |||
| Способ получения культуры клеток эпидермиса человека | 1983 |
|
SU1193168A1 |
| CN 201825146 U, 11.05.2011 | |||
| Способ изготовления положительных электродов для гальванических элементов с воздушной деполяризацией | 1935 |
|
SU44969A1 |

