Изобретение относится к области машиностроения и может быть использовано для обработки крупногабаритных деталей.
Известны устройства для измерения формы и размеров поверхностей технологической оснастки и деталей точного машиностроения (см. а.с. СССР №1795704, МПК G 01 B 11/03 и а.с. №1834493, МПК G 01 B 11/03).
Однако данные устройства не могут быть использованы для измерений в процессе обработки крупногабаритных изделий.
Наиболее близким к предлагаемому является обрабатывающее устройство, которое содержит основание, пространственно подвижную платформу с инструментальной головкой, измерительную систему для определения положения платформы в рабочем пространстве и приспособление для закрепления обрабатываемого объекта, выполненное в виде держателя, закрепленного на основании с возможностью линейных и угловых перемещений и имеющего совокупность базовых измерительных поверхностей, предназначенных для взаимодействия с измерительной системой и однозначно определяющих положение держателя в пространстве (см. пат. РФ №2084326, МПК B 23 Q 41/02).
Однако данное устройство не позволяет обрабатывать крупногабаритные детали.
Задачей изобретения является прецизионная обработка крупногабаритных деталей со сложными поверхностями за счет обеспечения многокоординатных измерений взаиморасположения обрабатываемого изделия и инструмента в процессе обработки.
Поставленная задача решается тем, что технологический модуль, включающий обрабатывающе-измерительный модуль с оптической системой, размещенный на основании, устройство для перемещения основания обрабатывающе-измерительного модуля, приспособление для закрепления обрабатываемого объекта, согласно изобретению содержит общее основание с размещенной на нем внешней рамой. Внешняя рама оснащается оптической системой измерения перемещений основания обрабатывающе-измерительного модуля и смещения приспособления для закрепления обрабатываемого объекта относительно рамы, причем количество измерительных осей, связывающих внешнюю раму с основанием обрабатывающе-измерительного модуля, равно 6, и измерительные оси расположены так, что однозначно определяют взаимное положение рамы и основания обрабатывающе-измерительного модуля, а количество измерительных осей, связывающих внешнюю раму с приспособлением для закрепления обрабатываемого объекта, может быть от 1 до 6 в зависимости от количества нежестких направлений связи обрабатываемого объекта с рамой, при этом приспособление для закрепления обрабатываемого объекта расположено не на внешней раме.
Изобретение поясняется чертежами.
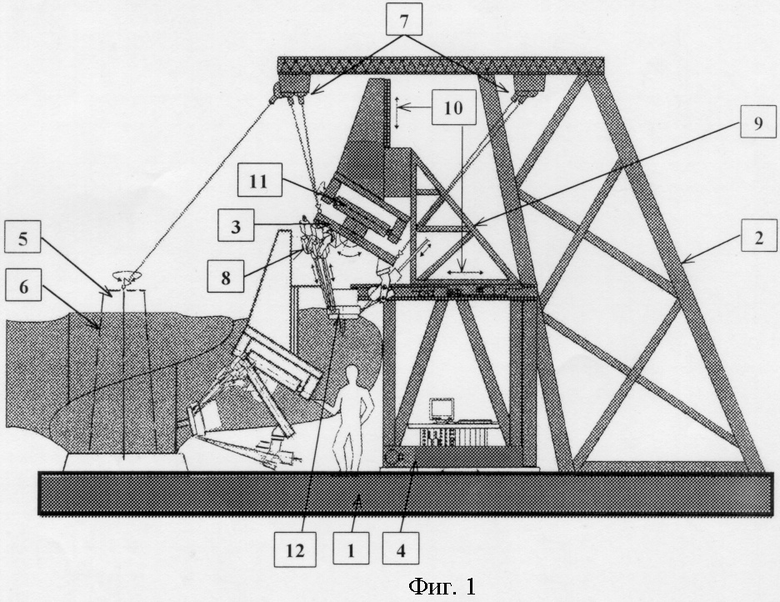
На фиг.1 изображен общий вид технологического модуля; на фиг.2 - обрабатывающе-измерительный модуль на фиг.3 - вид технологического модуля сверху, где:
1 - общее основание,
2 - внешняя рама,
3 - основание обрабатывающе-измерительного модуля,
4 - устройство перемещения основания обрабатывающе-измерительного модуля,
5 - приспособление для закрепления обрабатываемого объекта,
6 - обрабатываемый объект,
7 - оптическая система внешней рамы,
8 - оптическая система обрабатывающе-измерительного модуля,
9 - рама устройства для перемещения основания обрабатывающе-измерительного модуля,
10 - прямолинейные направляющие устройства для перемещения основания обрабатывающе-измерительного модуля,
11 - механизм осуществления угловых перемещений обрабатывающе-измерительного модуля,
12 - рабочий орган обрабатывающе-измерительного модуля,
13 - шарнирно закрепленные тяги обрабатывающе-измерительного модуля,
14 - привода линейных перемещений обрабатывающе-измерительного модуля.
Технологический модуль (см. фиг.1) содержит общее основание 1, на котором расположена внешняя рама 2, устройство перемещения основания 3 обрабатывающе-измерительного модуля 4, приспособление 5 для закрепления обрабатываемого объекта 6. Внешняя рама оснащена оптической системой 7 измерения взаимных перемещений самой рамы, обрабатываемого объекта и основания обрабатывающе-измерительного модуля 3. Устройство для перемещения основания обрабатывающе-измерительного модуля состоит из рамы 9, трех взаимно перпендикулярных прямолинейных направляющих 10, механизма осуществления угловых перемещений 11.
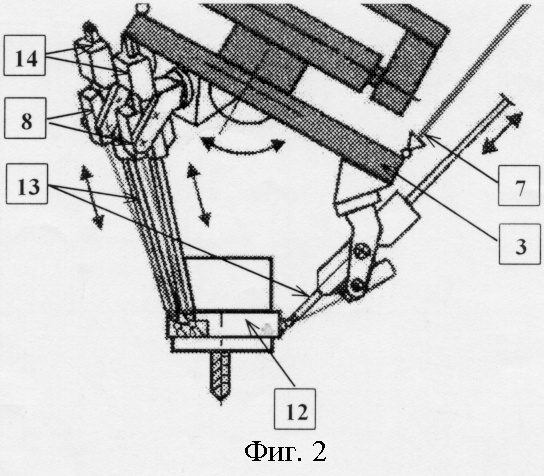
Рабочий орган 12 (см. фиг.2), на который устанавливается измерительная головка или шпиндель с обрабатывающим инструментом, соединен при помощи шарнирно закрепленных тяг 13 с приводами линейных перемещений 14, закрепленных на основании обрабатывающе-измерительного модуля 3. Обрабатывающе-измерительный модуль, в свою очередь, оснащен оптической системой 8.
Для обеспечения возможности прецизионной обработки крупногабаритных объектов со сложными поверхностями со всех сторон служит устройство для перемещения основания обрабатывающе-измерительного модуля, состоящее из элементов 9, 10, 11, обеспечивающее возможность линейных и угловых перемещений основания. Выполнение приспособления для закрепления обрабатываемого объекта 5 в виде держателя, закрепленного на общем основании с возможностью угловых перемещений и соединенного с внешней силовой рамой устройством для измерения перемещения, предназначенного для определения положения держателя с объектом и учета деформаций внешней силовой рамой 2, обеспечивает возможность прецизионной обработки объекта со всех сторон, точного определения координат обрабатываемого объекта при установке и переустановке и контроля в процессе обработки. Это позволяет повысить точность и технологичность обработки поверхности.
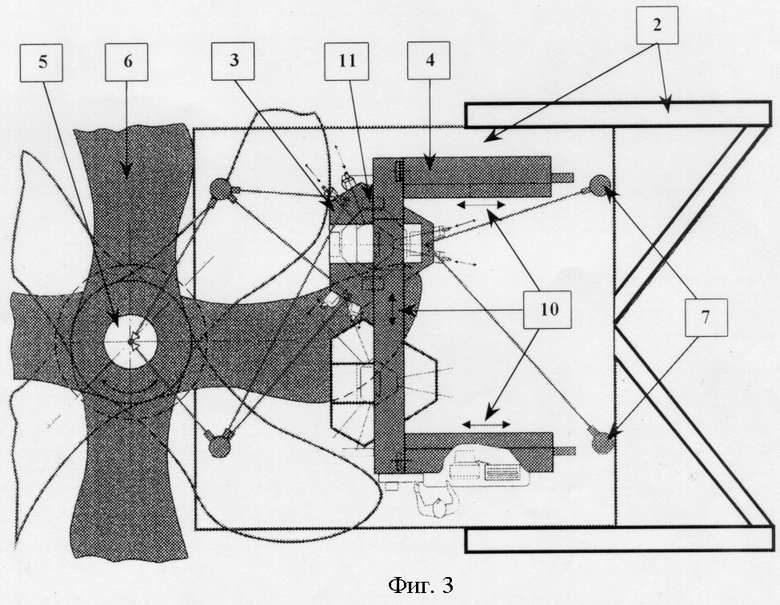
На фиг.3 мы видим, что в конструкции станка удалось отделить внешнюю измерительную систему 7, находящуюся на внешней раме 2, от двигательной системы обрабатывающего блока 4 и тем самым исключить влияние силовых агрегатов на процесс измерения.
Устройство работает следующим образом.
Обрабатываемый объект 6 закрепляется в необходимое для обработки положение на общем основании 1 с помощью держателя для закрепления обрабатываемого объекта 5.
Далее осуществляется базирование обрабатываемого объекта. На рабочий орган 12 устанавливается измерительная головка. Сначала посредством устройства для перемещения основания 3 обрабатывающе-измерительного модуля 4 и далее при помощи тяг 13, приводимых в движение приводами линейных перемещений 14, перемещаем рабочий орган 12 до взаимодействия измерительной головки с базовыми поверхностями обрабатываемого объекта 6, Касаясь поверхности обрабатываемого объекта 6, набираем массив его координат. Исходя из этих данных строится система координат обрабатываемого объекта 6.
Далее с учетом всей полученной информации о положении обрабатываемого объекта 6 в рабочий орган 12 помещают режущий инструмент и производят обработку по заданной программе с доступных для обработки сторон.
Для дальнейшей обработки с других сторон обрабатываемый объект раскрепляют и поворачивают вместе с держателем 5. После чего объект опять жестко закрепляют в держателе 5. Процедуру базировки повторяют. Далее процесс обработки продолжается. Таким образом, обрабатываемый объект 6 поворачивается столько раз, сколько необходимо, чтобы полностью обработать весь объект 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБРАБАТЫВАЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2084326C1 |
| СПОСОБ КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635336C2 |
| МИКРОСКОП ДЛЯ РАБОТЫ В ПРОХОДЯЩЕМ И (ИЛИ) ОТРАЖЕННОМ СВЕТЕ | 1986 |
|
RU2037854C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ОПТИЧЕСКОЙ СПЕКТРОМЕТРИИ | 2015 |
|
RU2616854C2 |
| Механизм прецизионного позиционирования для изготовления высокоточных оптических устройств | 2021 |
|
RU2771148C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПЕЧАТНЫХ ФОРМ ДЛЯ МЕТАЛЛОГРАФСКОЙ ПЕЧАТИ И ИЗГОТОВЛЕННАЯ ЭТИМ СПОСОБОМ ПЕЧАТНАЯ ФОРМА | 2003 |
|
RU2348533C2 |
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИПОЛЬНОГО МАГНИТНОГО МОМЕНТА ОСТАТОЧНОЙ НАМАГНИЧЕННОСТИ И ТЕНЗОРА МАГНИТНОЙ ПОЛЯРИЗУЕМОСТИ ОБЪЕКТА И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2744817C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ШЕРОХОВАТОСТИ, МИКРОМЕХАНИЧЕСКИХ И ТРИБОТЕХНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛА ПОВЕРХНОСТИ ИЗДЕЛИЙ | 2019 |
|
RU2731037C1 |
| УНИВЕРСАЛЬНЫЙ ИНЕРЦИАЛЬНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2020 |
|
RU2749641C1 |
Изобретение может быть использовано для обработки крупногабаритных деталей. Модуль включает обрабатывающе-измерительный модуль с оптической системой, размещенный на основании, устройство для перемещения последнего и приспособление для закрепления обрабатываемого объекта. На общем основании размещена внешняя рама, оснащенная оптической системой измерения перемещений основания обрабатывающе-измерительного модуля и смещения приспособления для закрепления обрабатывемого объекта относительно рамы. Приспособление для закрепления обрабатываемого объекта расположено не на внешней раме. Изобретение позволяет обеспечить обработку крупногабаритных деталей со сложными поверхностями. 3 ил.
Технологический модуль, включающий обрабатывающе-измерительный модуль с оптической системой, размещенный на основании, приспособление для закрепления обрабатываемого объекта, отличающийся тем, что он содержит общее основание с размещенной на нем внешней рамой, устройство для перемещения основания обрабатывающе-измерительного модуля, внешняя рама оснащена оптической системой измерения перемещений основания обрабатывающе-измерительного модуля и смещения приспособления для закрепления обрабатывемого объекта относительно рамы, причем количество измерительных осей, связывающих внешнюю раму с основанием обрабатывающе-измерительного модуля равно 6, и имерительные оси расположены так, что однозначно определяют взаимное положение рамы и основания обрабатывающе-измерительного модуля, а количество измерительных осей, связывающих внешнюю раму с приспособлением для закрепления обрабатываемого объекта, может быть от 1 до 6 в зависимости от количества нежестких направлений связи обрабатываемого объекта с рамой, при этом приспособление для закрепления обрабатываемого объекта расположено на общем основании.
| ОБРАБАТЫВАЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2084326C1 |
| СПОСОБ ОБРАБОТКИ СЛОЖНЫХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 1990 |
|
RU2050228C1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| 0 |
|
SU199705A1 |

