Изобретение может быть использовано для коррекции аналитических гировертикалей усеченного состава на лазерных или волоконнооптических гироскопах, например на двух гироскопах и трех акселерометрах, одном гироскопе и трех акселерометрах, одном гироскопе и двух акселерометрах. При этом для коррекции используется априорная и избыточная информация о характере движения объекта, имеющаяся на борту.
Известен способ коррекции аналитических гировертикалей усеченного состава [1] (Гупалов В.И., Мочалов А.В., Боронахин А.М. Аналитические гировертикали усеченного состава//Гироскопия и навигация. - 2001. - №2 (33). - C.25-36), заключающийся в том, что в невозмущенном режиме движения объекта вырабатывают текущие поправки привязки к горизонту каналов гироскопов, для чего из текущих оценок математических ожиданий обработки информации, поступающей с гироскопов, вычитают текущие оценки математических ожиданий, полученных при обработке информации, поступающей с акселерометров, и продольного ускорения, вырабатываемого по информации одометра (датчика пути), а в возмущенном режиме сохраняют ранее выработанные поправки привязки к горизонту и корректируют перекрестные связи по априорной и избыточной информации о характере движения объекта.
Недостатком этого способа является сравнительно низкая точность, обусловленная недокомпенсацией перекрестных связей, и уход истинной поправки привязки к горизонту от запомненной за время работы в возмущенном режиме (дрейф гироскопов и вращение Земли).
Задачей изобретения является создание универсального способа коррекции аналитических гировертикалей усеченного состава (АГВУС).
Сущность заявленного изобретения заключается в следующем. Введем систему координат Oxyz, связанную с объектом, где ось Оу направлена по продольной оси, Oz - перпендикулярна полу (палубе) объекта и направлена вверх, a Ox - образует правую систему координат. Для объекта, движущегося по поверхности Земли со скоростью менее 300 км/ч, измеряемые акселерометрами проекции ускорения могут быть представлены в виде

где θ , ψ , К - углы крена, тангажа и курса объекта;  ,
,  - квазигармонические ускорения по осям Ох и Оz, обусловленные качкой и вибрацией объекта, математические ожидания которых можно считать равными нулю (
- квазигармонические ускорения по осям Ох и Оz, обусловленные качкой и вибрацией объекта, математические ожидания которых можно считать равными нулю ( );
);  - продольное ускорение объекта; b - центростремительное ускорение. Составляющая а вертикального ускорения, возникающая при движении объекта в гору или под уклон, вычисляется как
- продольное ускорение объекта; b - центростремительное ускорение. Составляющая а вертикального ускорения, возникающая при движении объекта в гору или под уклон, вычисляется как  .
.
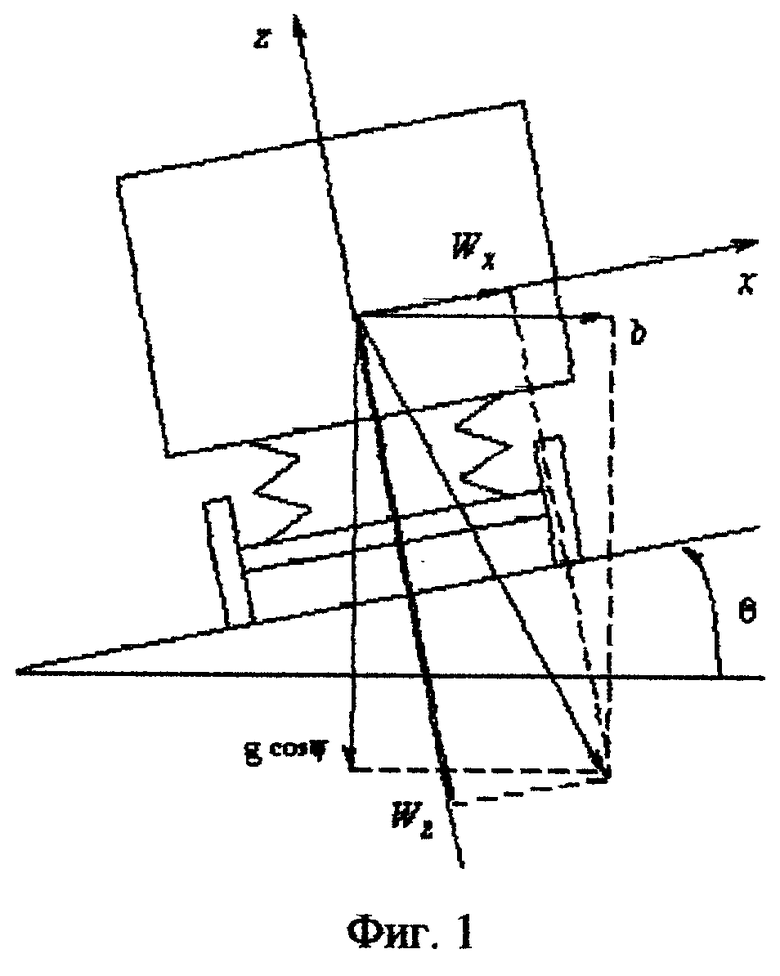
В частности, если объект является путеизмерительным вагоном, то соотношение проекций составляющих ускорений на плоскость поперечного сечения кузова вагона иллюстрируется фиг.1. Учитывая, что в выражении (1) для Wz справедливо условие bsinθ <<gcosθ cosψ , можно говорить о возможности определения угла продольного уклона (ψ ак), угла поперечного наклона (θ ак) кузова вагона по показаниям акселерометров из следующих соотношений:
где  - показание продольного акселерометра Wy, скорректированное на величину ускорения вагона
- показание продольного акселерометра Wy, скорректированное на величину ускорения вагона  , полученного по датированным отсчетам одометра; i - номер измерения с момента начала работы АГВУС; θ i-1 - угол поперечного уклона на предыдущем такте.
, полученного по датированным отсчетам одометра; i - номер измерения с момента начала работы АГВУС; θ i-1 - угол поперечного уклона на предыдущем такте.
По информации, поступающей из каналов оптических гироскопов (ОГ), могут быть получены математические ожидания углов продольного уклона (ψ ог) и поперечного наклона (θ ог) объекта

где N - величина выборки, на которой производится оценка математических ожиданий углов.
Аналогично (3), используя выражение (2), вырабатываются оценки математических ожиданий углов по показаниям акселерометра  Информация о величине рассогласований оценок математических ожиданий углов, полученные по показаниям ОГ и акселерометров
Информация о величине рассогласований оценок математических ожиданий углов, полученные по показаниям ОГ и акселерометров

используются в дальнейшем для коррекции текущих показаний ОГ.
Величина центростремительного ускорения (фиг.1) может быть определена следующими способами:
1. Как разность текущего поперечного ускорения, измеренного поперечным акселерометром, и вычисленного поперечного ускорения с учетом углов, выработанных на предыдущем такте

2. Оценка модуля bi может быть определена как корень квадратный из суммы квадратов измеренных текущих ускорений, лежащих в поперечной плоскости, минус квадрат ускорения свободного падения (фиг.1)

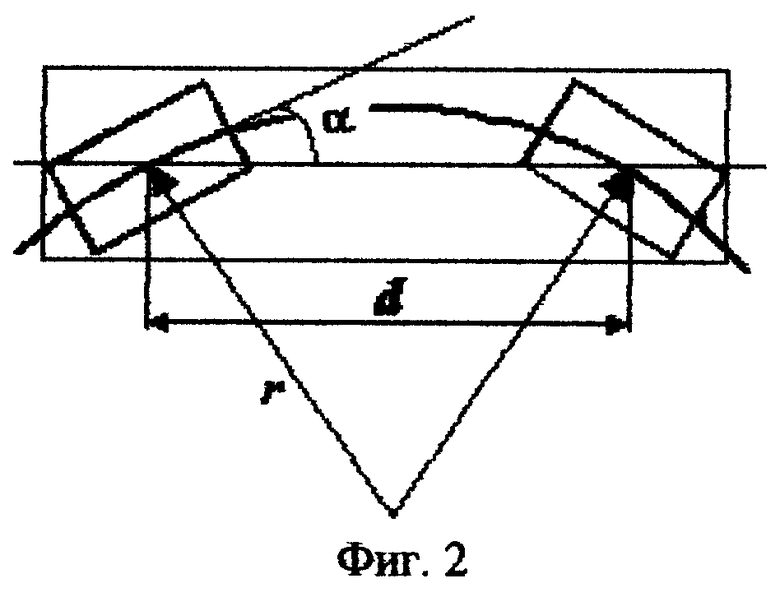
3. Как отношение квадрата скорости движения объекта по датированным отсчетам одометра (Vyi), деленный на текущий радиус циркуляции (ri)

При этом ri (фиг.2) может быть определен из следующего выражения:
где d - база между центрами ходовых тележек; α i - угол между продольной осью кузова путеизмерительного вагона и продольной осью тележки.
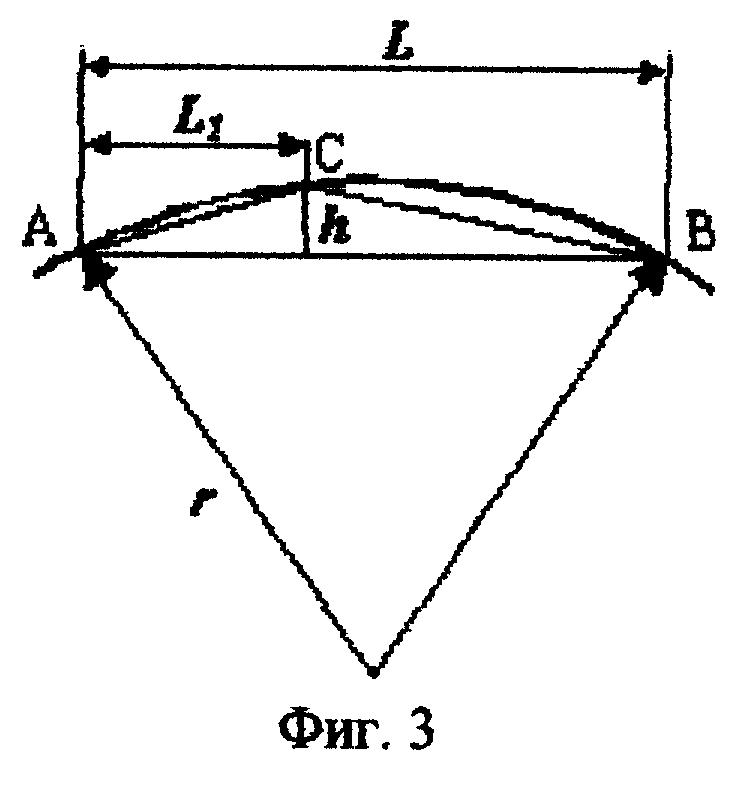
4. Аналогично п.3, но радиус циркуляции вычисляется по информации канала измерения рихтовки (профиля пути в плане) путеизмерительного вагона (схематическое изображение хордового метода, используемого при измерении рихтовки приведено на фиг.3)

где hi - величина текущего измерения рихтовки;  - длина стороны АС треугольника АВС (фиг.3);
- длина стороны АС треугольника АВС (фиг.3);  - длина стороны ВС треугольника АВС (фиг.3); L, L1 - измерительные базы канала рихтовки.
- длина стороны ВС треугольника АВС (фиг.3); L, L1 - измерительные базы канала рихтовки.
5. Аналогично п.3 для вычисления центростремительного ускорения может использоваться проектное (паспортное) значение радиуса циркуляции.
6. Как произведение текущей продольной скорости объекта, получаемой по датированным отсчетам одометра Vyi, на приращение курсового угла, получаемое при обработке информации спутниковой навигационной системы (Δ Ki) и датчиков относительных перемещений кузова путеизмерительного вагона

Величина Δ Ki может быть определена из следующего выражения:

где Δ ξ , Δ η - приращения географических координат объекта; γ i - угол рысканья кузова вагона относительно рельсового пути.
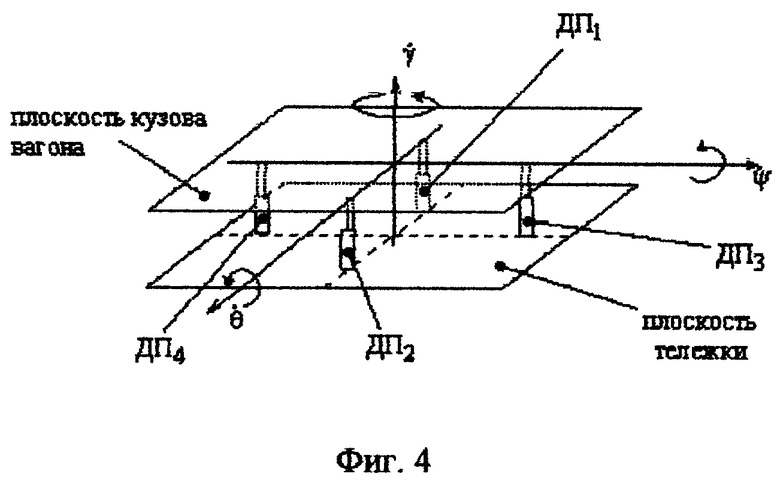
Для определения γ i задействуется система датчиков перемещения (ДП) кузова вагона относительно рельсового пути (фиг.4)
где  - линейное перемещение кузова вагона относительно тележки, измеряемое датчиком положения (j=1-4); В12 - расстояние между точками крепления к тележке ДП1 и ДП2; B34 - расстояние между точками крепления к тележке ДП3 и ДП4.
- линейное перемещение кузова вагона относительно тележки, измеряемое датчиком положения (j=1-4); В12 - расстояние между точками крепления к тележке ДП1 и ДП2; B34 - расстояние между точками крепления к тележке ДП3 и ДП4.
7. Среднее значение центростремительного ускорения  может быть определено как разность текущих оценок математических ожиданий расчетных и измеренных поперечных ускорений (см. п.1)
может быть определено как разность текущих оценок математических ожиданий расчетных и измеренных поперечных ускорений (см. п.1)
Так как оценки центростремительного ускорения получаются по информации различных каналов, то их погрешности будут иметь различные спектральные плотности. Поэтому целесообразно применить комплексирование (интегрирование) приведенных алгоритмов. Скомплексированные оценки могут находится как среднее арифметическое, среднее геометрическое, полученные из исходных оценок, или при использовании оптимальной фильтрации.
Таким образом, предложенный способ позволяет корректировать каналы оптических гироскопов по каналам акселерометров с привлечением дополнительных источников информации в независимости от режимов движения объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ДАТЧИКА ПРОЙДЕННОЙ ДИСТАНЦИИ | 2003 |
|
RU2243505C1 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| СПОСОБ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ НЕРОВНОСТЕЙ (РИХТОВКИ) И КРИВИЗНЫ В ПЛАНЕ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2276216C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСАДКИ РЕЛЬСОВЫХ НИТЕЙ | 2003 |
|
RU2242554C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕИЗМЕРИТЕЛЬНЫМ ВАГОНОМ ЖЕСТКОСТИ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2240244C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕИЗМЕРИТЕЛЬНЫМ ВАГОНОМ БОКОВЫХ (ПОПЕРЕЧНЫХ) ЖЕСТКОСТЕЙ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2291804C2 |
| СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ И АКУСТОЭЛЕКТРОННЫЙ ГИРОСКОП ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2400709C2 |
| Устройство для измерения продольного уклона железнодорожного пути | 1985 |
|
SU1289946A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
Изобретение может быть использовано для коррекции аналитических гировертикалей усеченного состава на лазерных или волоконно-оптических гироскопах. Способ заключается в том, что в невозмущенном режиме движения объекта вырабатывают текущие поправки привязки к горизонту каналов обработки сигналов оптических гироскопов, для чего из текущих оценок математических ожиданий углов, поступающих с каналов гироскопов, вычитают текущие оценки математических ожиданий углов, полученных при обработке информации, поступающей с акселерометров, и продольного ускорения объекта, вырабатываемого по датированной информации одометра, а в возмущенном режиме движения объекта на основе априорной и избыточной информации о характере движения объекта получают оценки текущего центростремительного ускорения, т.е. получая квазиневозмущенный режим работы. Техническим результатом является возможность коррекции каналов оптических гироскопов по каналам акселерометров в независимости от режимов движения объекта. 4 ил.
Способ коррекции аналитических гировертикалей усеченного состава, заключающийся в том, что в невозмущенном режиме движения объекта вырабатывают текущие поправки привязки к горизонту каналов обработки сигналов оптических гироскопов, для чего из текущих оценок математических ожиданий углов, поступающих с каналов гироскопов, вычитают текущие оценки математических ожиданий углов, полученных при обработке информации, поступающей с акселерометров, и продольного ускорения объекта, вырабатываемого по датированной информации одометра, отличающийся тем, что при возмущенном режиме движения объекта корректируют текущие показания акселерометров на величину уточненной текущей оценки центростремительного ускорения, затем скомпенсированные текущие значения ускорений используют для выработки текущих оценок математических ожиданий углов отклонения от плоскости горизонта, полученные по скорректированным показаниям акселерометров, и вычисления текущих поправок привязки к горизонту текущих углов, выработанных в каналах оптических гироскопов, причем уточненное текущее значение центростремительного ускорения получают интегрированием (комплексированием) нескольких текущих оценок центростремительного ускорения из ниже перечисленных:
- как разность текущего поперечного ускорения, измеренного поперечным акселерометром, и вычисленного поперечного ускорения с учетом углов отклонения от плоскости горизонта, выработанных на предыдущем такте;
- как корень квадратный из суммы квадратов измеренных текущих ускорений, лежащих в поперечной плоскости объекта, минус квадрат ускорения свободного падения;
- как квадрат текущего значения продольной скорости объекта, получаемой по датированным отсчетам одометра, деленный на текущий радиус циркуляции, получаемый как отношение базы между центрами ходовых тележек путеизмерительного вагона к двойному значению синуса угла между продольной осью кузова и продольной осью ходовой тележки;
- как квадрат текущего значения продольной скорости объекта, получаемой по датированным отсчетам одометра, деленный на текущий радиус циркуляции, получаемый как отношение произведения боковых сторон треугольника, образующихся при прохождении кривой в канале рихтовки путеизмерительного вагона, к удвоенному значению величины рихтовки;
- как квадрат текущего значения продольной скорости объекта, получаемой по датированным отсчетам одометра, деленный на проектное (паспортное) значение радиуса циркуляции;
- как произведение текущей продольной скорости объекта, получаемой по датированным отсчетам одометра, на приращение курсового угла, получаемое при обработке информации спутниковой навигационной системы и датчиков относительных перемещений тележек относительно кузова путеизмерительного вагона;
- как разность текущих оценок математических ожиданий расчетных поперечных ускорений и измеренных поперечных ускорений.
| ГУПАЛОВ В.И | |||
| и др | |||
| Аналитические гировертикали усеченного состава | |||
| Гироскопия и навигация | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2127867C1 |
| US 4882845 A, 28.11.1989. | |||

