Изобретение относится к подъемно-транспортному машиностроению, а именно к способам, предотвращающим раскачивание груза, подвешенного на канате стрелового крана, и устройствам, позволяющим обеспечить процесс гашения колебаний.
Известен способ подавления раскачивания грузового каната подъемного крана и устройство для его осуществления, основанные на математическом анализе динамических процессов, протекающих при пуске и торможении механизма передвижения грузовой тележки крана с одновременной работой механизма подъема груза. В результате анализа получен имеющий вид алгебраической зависимости алгоритм действия процессора, управляющего приводами крана. В процессор поступают сигналы от датчиков о частоте вращения двигателей, посредством которых возможны подъем груза и передвижение тележки. Регулирование процесса раскачивания грузового каната осуществляется путем изменения крутящих моментов приводных двигателей, что продемонстрировано на примере нескольких вариантов управляющих блоков приводов крана (публикация 1В51П в РЖ 1998 г., №1 Method and apparatus of damping the sway of the hoisting rope of a crane: Пат. №5495955 США, МКИ6 В 66 С 13/06, Shibata Naotake K.K. Yaskawa Denki №453313. Заявл. 20.05.95 г. Опубл. 05.03.96 г. Приор. 18.10.91 г., №3-299740 (Япония); НКИ 212/275).
Недостатком данного изобретения является недостаточная надежность микропроцессорной техники, поскольку установленная на подъемном кране, испытывающем существенные динамические нагрузки, и ориентированная на осуществление весьма точных задач по управлению приводами элементов крана с целью гашения колебаний, может зачастую стать причиной отказа в работе системы управления.
Другим известным способом гашения колебаний и устройством для его осуществления является: 1) способ гашения колебаний груза, подвешенного на двух канатах, расположенных в плоскости его перемещения, заключающийся в том, что к грузу прикладывают усилие, направленное в сторону, противоположную направлению его движения, и прикладываемое в начальный момент возникновения колебательного процесса посредством изменения длины соответствующего каната; 2) устройство для гашения колебаний груза, подвешенного на канатах, расположенных в плоскости его перемещения, содержащее противоположно направленные гидроцилиндры для закрепления на грузовой тележке крана, смонтированные блоки, запасованные в них и связанные одними концами с грузозахватными органами канаты для закрепления другими концами на грузовой тележке, причем устройство снабжено лазером инфракрасного излучения для установки на грузовой тележке с возможностью направления его луча вертикально вниз, смонтированным на грузозахватном органе рефлектором полного внутреннего отражения, расположенным при нейтральном положении грузозахватного органа под лазером, установленными симметрично относительно последнего фотоприемниками для закрепления на грузовой тележке, реверсивным приводным гидронасосом, разноименные выходы которого сообщены с соответствующими одноименными полостями гидроцилиндров, синхронными детекторами, соединенными своими входами с выходами соответствующих интеграторов компаратором, выход которого соединен с входом блока реверсирования привода гидронасоса (а.с. №1801823, М. кл. В 66 С 13/06).
Способ и устройство позволяют путем воздействия на грузовые канаты существенно уменьшить колебания груза уже на стадии их возникновения, что позволит повысить производительность крана за счет уменьшения времени, затрачиваемого на гашение колебаний.
Однако следует отметить сложность и вызванную этим обстоятельством ненадежность и дороговизну устройства.
Наиболее близким к предлагаемому способу и устройству по уменьшению времени на успокоение груза на канате стрелового крана следует отнести способ, позволяющий за счет изменения массы балластного груза и его расположения уменьшать амплитуду, а значит, и период колебаний монтируемого элемента, подвешенного на грузовом канате (Вайнсон А.А., Андреев А.Ф. Крановые грузозахватные устройства: Справочник. М.: Машиностроение, 1982, - 304 с.: ил.).
За счет изменения хода и массы балластного груза можно регулировать отклонение груза от вертикали, основываясь на закономерности (1):
где хг - наибольшее отклонение груза; Т - ускоряющая сила; l - длина подвеса груза; mк - масса крана; mр - масса ротора и связанных с ним механизмов; mг - масса балластного груза.
Длина хода балластного груза определяется изменением длины ветви каната при изменении высоты подъема груза. Масса балластного груза определяется из анализа колебательного процесса, характеризующего отклонение подвешенного груза от вертикали при неустановившемся движении крана.
Устройство для гашения колебаний представляет собой пассивный успокоитель в виде балластного груза, установленного на направляющих вдоль стрелы крана с возможностью перемещения по ним. Балластный груз укреплен к образующему полиспаст удерживающему канату, присоединенному к грузозахватному устройству любого типа. Масса балластного груза мала по сравнению с массой поднимаемого груза, поэтому при подъеме или опускании грузозахватного устройства балластный груз за счет составляющей силы натяжения удерживающего каната следует за ним по направляющим свободно. При раскачивании грузозахватного устройства составляющая кратковременно действующего натяжения удерживающего каната недостаточна для быстрого преодоления инерции и передвижения балластного груза, что и приводит к предотвращению раскачивания.
Недостатками известного способа и устройства для его реализации являются:
1. Балластный груз, размещенный в стреле крана, создает опрокидывающий момент, что снижает полезную производительность крана;
2. Расположение балластного груза в коренной части стрелы ограничивает область его размещения;
3. Для более эффективного успокоения колебательного процесса ход балластного груза должен быть небольшим, что приводит к увеличению массы успокоителя, а это в свою очередь может отразиться на безопасности проведения работ;
4. Предлагаемое устройство не позволяет мобильного его использования, то есть изменять в ходе строительно-монтажных работ массу балластного груза с целью наиболее эффективного гашения колебаний;
5. Удерживающий канат (канат, связывающий балластный груз и груз поднимаемый) представляет собой конструкцию, создающую определенные неудобства при работе в стесненных условиях.
Задачей изобретения является уменьшение периода и амплитуды колебаний груза, подвешенного на рабочих ветвях грузового каната стрелового крана, за счет разбиения грузового подвеса балластным грузом. Поставленная задача достигается тем, что:
1. Устройство для гашения колебаний груза, подвешенного на рабочих ветвях грузового каната стрелового крана, расположенных в плоскости перемещения груза, содержит балластный груз, при этом оно содержит металлический корпус криволинейной формы, установленный шарнирно в нижней части грузовой тележки крана, в верхней части корпуса выполнены сквозные цилиндрические отверстия с полимерными втулками для рабочих ветвей грузового каната, расположенные симметрично относительно центральной оси устройства, внутри корпуса в его верхней части жестко установлена лебедка с тормозным устройством, электроприводом и гибким кабелем, осуществляющим питание последнего, на барабан лебедки намотан направляющий трос, центрируемый посредством обводного ролика, установленного на горизонтальной оси, закрепленной на боковой поверхности корпуса, и связанного через зубчатую передачу со счетчиком расхода троса, при этом нижний конец последнего пропущен через отверстие в вертикальной штанге и жестко закреплен вместе с ней через пластину с упомянутым балластным грузом, образующим основание для установки на него дополнительных балластных грузов, внутри корпуса в его нижней части жестко установлены электромагнитные замки, имеющие токоведущие элементы для подвода к ним питания, в балластных грузах выполнены пазы для сердечников электромагнитных замков и цилиндрические отверстия, расположенные соосно отверстиям в верхней части корпуса для прохождения рабочих ветвей грузового каната, и центральное отверстие для прохождения направляющего троса, выполненные с полимерными втулками, при этом нижняя часть втулок центрального отверстия выполнена конической, устройство снабжено командоаппаратом, имеющим информационное табло, подающее сведения о месте расположения балластного груза по длине грузового подвеса, поступающие от счетчика расхода троса, тумблер управления лебедкой и кнопки управления электромагнитными замками.
2. Устройство по п.1 содержит внутри корпуса на его боковой поверхности жестко закрепленные горизонтально расположенные стержни, на одном из которых жестко закреплен выключатель с гибким электрокабелем, а на другом шарнирно установлен рычаг, расположенный с возможностью упора в него упомянутой вертикальной штанги и воздействия ею через этот рычаг на конечный выключатель для отключения электропитания лебедки и опирающийся на упор-держатель.
3. Устройство по п.1 содержит балластные грузы, выполненные с возможностью закрепления их на рабочих ветвях грузового каната, например, посредством электромагнитных зажимов.
Новые существенные признаки:
1. Устройство содержит металлический корпус криволинейной формы, установленный шарнирно в нижней части грузовой тележки крана;
2. В верхней части корпуса выполнены сквозные цилиндрические отверстия с полимерными втулками для рабочих ветвей грузового каната, расположенные симметрично относительно центральной оси устройства;
3. Внутри корпуса в его верхней части жестко установлена лебедка с тормозным устройством, электроприводом и гибким кабелем, осуществляющим электропитание последнего;
4. На барабан лебедки намотан направляющий трос;
5. Направляющий трос центрируется посредством обводного ролика, установленного на горизонтальной оси, закрепленной на боковой поверхности корпуса;
6. Обводной ролик связан через зубчатую передачу со счетчиком расхода троса;
7. Нижний конец направляющего троса пропущен через отверстие в вертикальной штанге и жестко закреплен вместе с ней через пластину с упомянутым балластным грузом, образующим основание для установки на него дополнительных балластных грузов;
8. Внутри корпуса в его нижней части жестко установлены электромагнитные замки, имеющие токоведущие элементы для подвода к ним питания;
9. В балластных грузах выполнены пазы для сердечников электромагнитных замков;
10. В балластных грузах выполнены цилиндрические отверстия с полимерными втулками, расположенные соосно отверстиям в верхней части корпуса для прохождения рабочих ветвей грузового каната;
11. В балластных грузах выполнено центральное отверстие для прохождения направляющего троса;
12. Нижняя часть втулки центрального отверстия балластного груза выполнена конической;
13. Устройство снабжено командоаппаратом, имеющим информационное табло;
14. Информационное табло подает сведения о месте расположения балластного груза по длине грузового подвеса, поступающие от счетчика расхода троса;
15. Командоаппарат имеет тумблер управления лебедкой и кнопки управления электромагнитными замками;
16. Внутри корпуса на его боковой поверхности жестко закреплены горизонтально расположенные стержни, на одном из которых жестко закреплен выключатель с гибким электрокабелем, а на другом шарнирно установлен рычаг;
17. Рычаг расположен с возможностью упора в него упомянутой вертикальной штанги и воздействия ею через этот рычаг на конечный выключатель для отключения электропитания лебедки и опирающийся на упор-держатель;
18. Балластные грузы выполнены с возможностью закрепления их на рабочих ветвях грузового каната посредством электромагнитных зажимов.
Перечисленные новые признаки в совокупности с известными обеспечивают получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Технический результат обеспечивается тем, что устройство для гашения колебаний груза, подвешенного на рабочих ветвях грузового каната стрелового крана, позволяет уменьшить период и амплитуду колебания груза уже на стадии их возникновения путем уменьшения длины подвеса за счет разделения последнего балластным грузом на две части, что позволит увеличить производительность и обеспечить безопасность выполнения строительно-монтажных и погрузочно-разгрузочных работ.
Предлагаемое изобретение, направленное на уменьшение периода колебаний, связанное с разбиением грузового подвеса балластным грузом в соответствующих отношениях, позволит сократить период колебаний в среднем на 30%, что в свою очередь позволит сократить время одного цикла крана на 5%, а значит, производительность работы крана в смену в среднем возрастет на 16%.
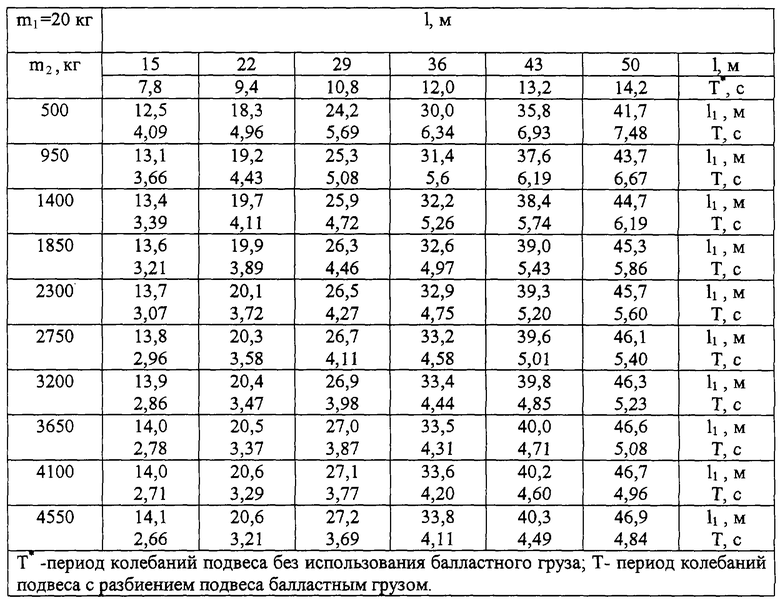
Для обеспечения технического результата разработано устройство, управляемое дистанционно из кабины оператора. Блок управления представляет командоаппарат, имеющий информационное табло, подающее сведения о месте расположения балластного груза по длине грузового подвеса, поступающие от счетчика расхода троса. Командоаппарат снабжен тумблером управления лебедкой, имеющей тормозное устройство, посредством которых осуществляется подъем, спуск и торможение направляющего троса с балластным грузом, образующим основание для установки на него дополнительных балластных грузов, именуемым в дальнейшем балластным грузом-основанием. Кроме того, командоаппарат имеет кнопки управления с индикацией, посредством которых выбирается количество, а тем самым и вес, балластных грузов и возможность их высвобождения от закрепления в корпусе (крепление балластных грузов в корпусе осуществляется за счет электромагнитных замков с сердечниками, входящими в пазы балластных грузов) с дальнейшим передвижением вниз или вверх с помощью направляющего троса. При этом положение каждой кнопки управления, предусмотренной отдельно для конкретного рабочего балластного груза и балластного груза-основания, при нажатии на нее фиксируется и сопровождается включением индикаторной лампочки. Располагая сведениями о массе поднимаемого (монтируемого) груза и длине грузового подвеса, которые диктуются условиями монтажа, оператор по имеющейся в кабине таблице (например, см. прилагаемую таблицу) с целью уменьшения периода колебаний груза может выбрать оптимальное значение массы балластного груза, их количества и расположения его по длине подвеса, а затем при выполнении определенных действий зафиксировать балластный груз или грузы в соответствующем месте на подвесе.
Движение направляющего каната осуществляется через лебедку с тормозным устройством, снабженную электроприводом с гибким кабелем, осуществляющим электропитание. Движения направляющего троса вверх или вниз происходят при переводе тумблера из нейтрального положения, соответственно, вверх или вниз. Нейтральное положение тумблера соответствует остановке движения направляющего троса, что возможно при автоматическом срабатывании тормозного устройства лебедки. В верхней части корпуса выполнены сквозные цилиндрические отверстия с полимерными втулками для прохождения через них ветвей грузового каната. В балластных грузах выполнены цилиндрические отверстия, расположенные соосно отверстиям в верхней части корпуса, и центральные отверстия для прохождения через них направляющего троса. С целью избежания возможного перетирания ветвей грузового каната и направляющего троса, проходящих через отверстия, в последние установлены полимерные втулки, которым к тому же не свойственна коррозия. Верхняя часть втулок центральных отверстий балластных грузов выполнена цилиндрической, а нижняя конической, что позволяет вертикальной штанге легко (без сопротивления) центрироваться в отверстиях балластных грузов.
Кроме того, в балластные грузы должны быть вмонтированы, например, электромагнитные зажимы, служащие для жесткой фиксации балластного груза к рабочим ветвям грузового каната с целью обеспечения жесткости конструкции подвеса, обеспечивающего снижение периода и амплитуды колебаний. С целью создания условий, определяющих срединное положение направляющего троса относительно рабочих ветвей грузового каната, в устройстве предусмотрен обводной ролик, установленный на горизонтальной оси, закрепленной на боковой поверхности корпуса. Таким образом, направляющий трос, выполняющий движение вниз или вверх, проходя по канавке обводного ролика, будет иметь строго вертикальное положение. Для того чтобы оператор мог точно осуществить стопорение балластного груза-основания на необходимой по длине подвеса высоте, обводной ролик через зубчатую передачу связан со счетчиком расхода троса.
Для фиксации балластных грузов в корпусе жестко установлены электромагнитные замки с сердечниками, контактирующими с пазами балластных грузов. Электропитание замков осуществляется через токоведущие элементы, например, гибкий кабель.
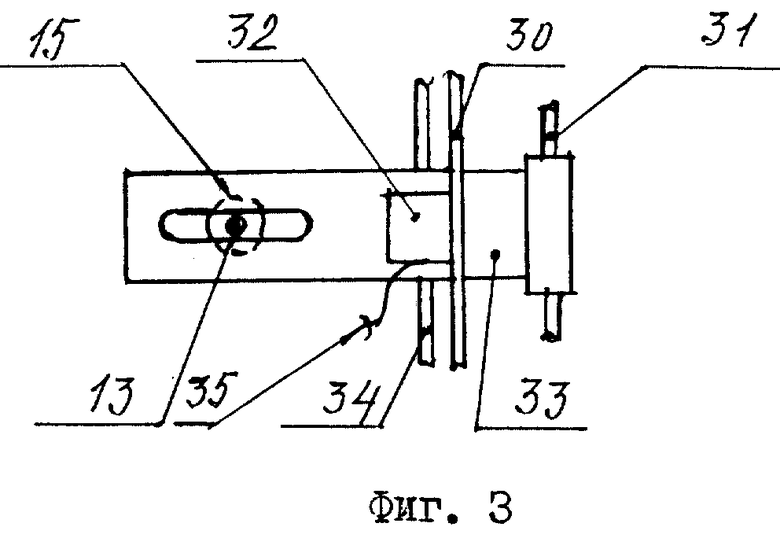
С целью предотвращения обрыва троса или поломки лебедки в случае, когда балластный груз поднимается вверх, и кнопка управления движением последнего по каким-то причинам не отключена, предусмотрено аварийное устройство, содержащее внутри корпуса горизонтально расположенные стержни, жестко закрепленные на его боковой поверхности. На одном из стержней жестко закреплен выключатель с гибким электрокабелем, а на другом шарнирно установлен рычаг, расположенный с возможностью упора в него вертикальной штанги, и опирающийся на упор-держатель.
Такое устройство позволит при упирании вертикальной штанги в рычаг воздействовать на выключатель, после чего мгновенно отключается электропитание лебедки, а значит, движение троса прекращается.
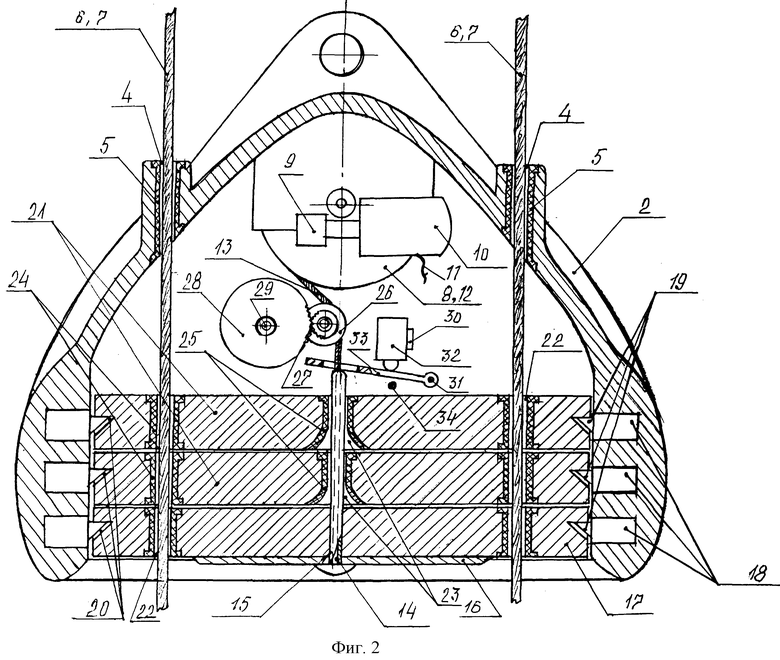
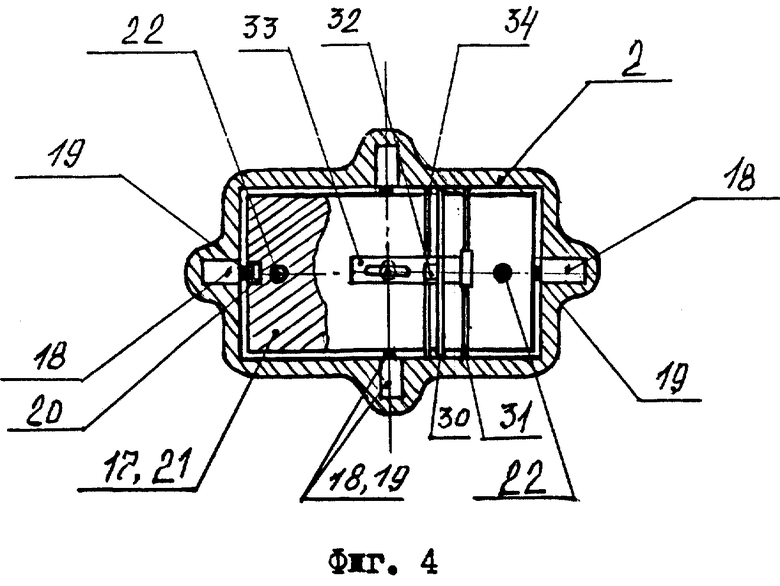
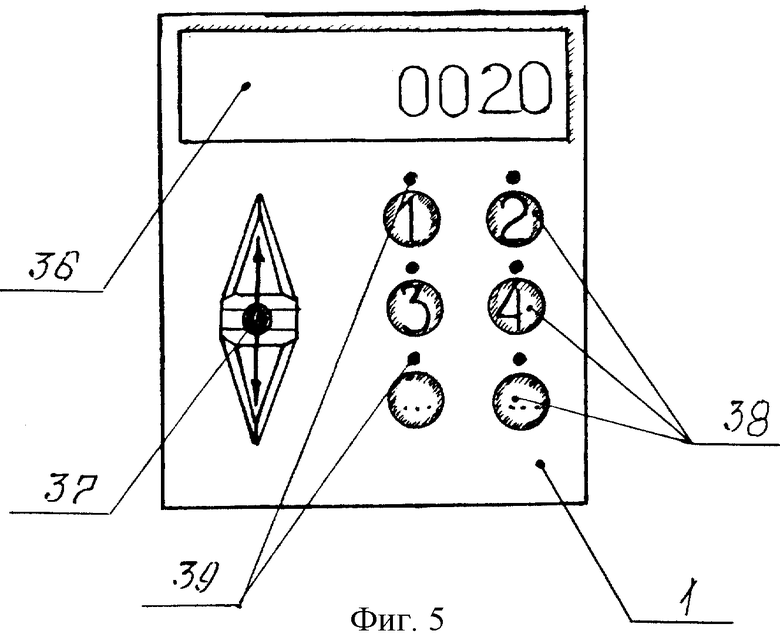
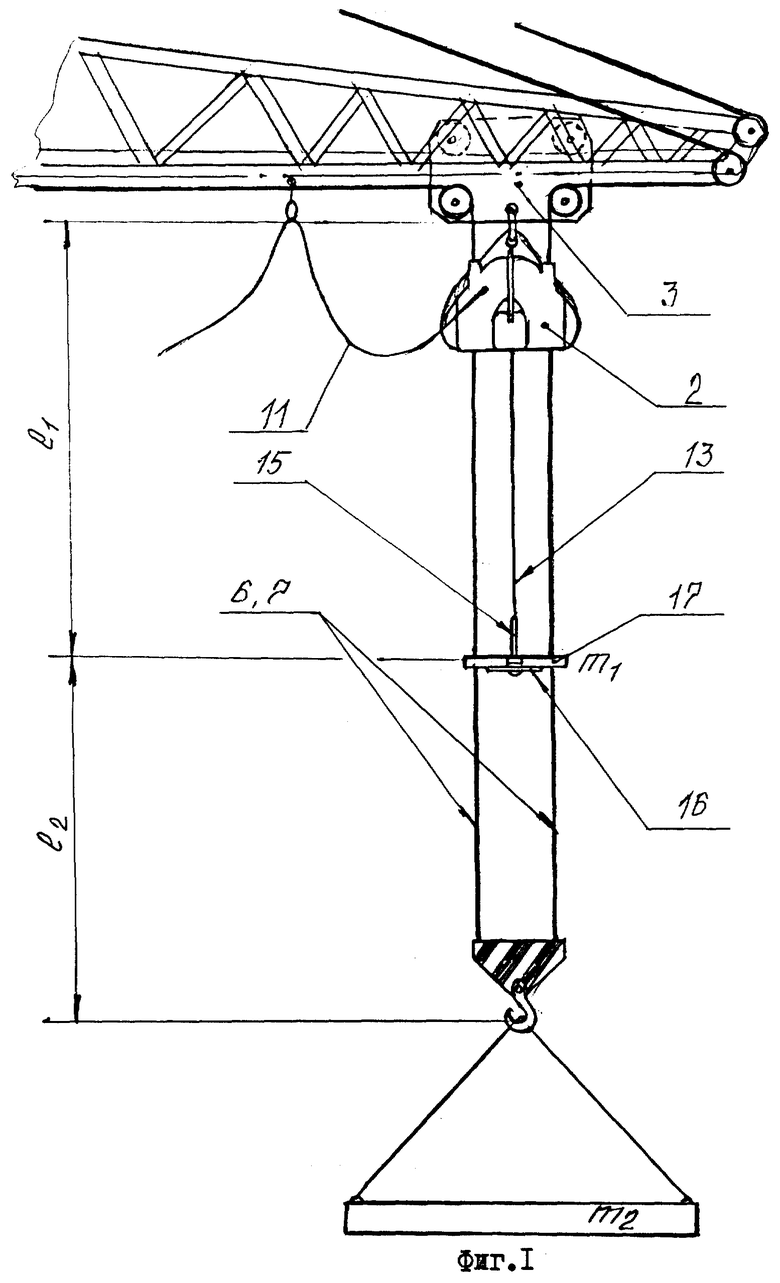
На фиг.1 представлен подвес стрелового крана с поднимаемым грузом и устройством для гашения колебаний общий вид; на фиг.2 - фронтальный разрез корпуса; на фиг.3 - рычаг управления выключателем вид сверху; на фиг.4 - горизонтальный разрез корпуса; на фиг.5 - командоаппарат.
Изобретение для гашения колебаний груза, подвешенного на рабочих ветвях грузового каната стрелового крана, представляет собой управляемое дистанционно, например командоаппаратом 1, устройство, состоящее из металлического корпуса 2 криволинейной формы, шарнирно установленного в нижней части грузовой тележки 3 крана. В верхней части корпуса 2 выполнены симметрично относительно центральной оси устройства сквозные цилиндрические отверстия 4 с полимерными втулками 5, через отверстия в которых проходят рабочие ветви 6 грузового каната 7. Внутри корпуса 2 в его верхней части жестко установлена лебедка 8 с тормозным устройством 9, снабженная электроприводом 10 и гибким кабелем 11, осуществляющим ее электропитание, при этом на барабан 12 последней намотан направляющий трос 13, нижний конец которого, пропущенный через отверстие 14 в вертикальной штанге 15, жестко закреплен вместе с ней через пластину 16 с балластным грузом, образующим основание для установки на него дополнительных балластных грузов 17 (именуемым балластным грузом основанием 17). Внутри корпуса 2 в нижней его части жестко установлены электромагнитные замки 18, сердечники 19 которых связаны с пазами 20 балластных грузов 21. В балластных грузах 17, 21 для прохождения рабочих ветвей 6 грузового каната 7 и направляющего троса 13 выполнены сквозные цилиндрические 22, соосно отверстиям 4, и центральные 23 сквозные отверстия с установленными в них полимерными втулками 24 и 25, причем нижняя часть втулок 25 центрального отверстия 23 выполнена конической. Направляющий трос 13 снабжен обводным роликом 26, связанным через зубчатую передачу 27 со счетчиком расхода троса 28. Обводной ролик 26 установлен на горизонтальную ось 29, жестко закрепленную на боковой поверхности корпуса 2. Внутри корпуса 2 на его боковой поверхности жестко закреплены горизонтально расположенные стержни 30, 31, жестко связанные, соответственно, с выключателем 32 и рычагом 33, опирающимся на упор-держатель 34. Электромагнитные замки 18 и выключатель 32 снабжены токоведущими элементами 35, осуществляющими их электропитание. Устройство для гашения колебаний управляется командоаппаратом 1, содержащим информационное табло 36 о месте расположения балластных грузов 17, 21, тумблер управления 37 движением троса, кнопки управления балластными грузами 38, каждая из которых снабжена индикаторной лампочкой 39. Для фиксации балластных грузов 17, 21 в требуемом положении по обе стороны отверстий 22 в балластных грузах вмонтированы, например, электромагнитные зажимы (на чертежах не показаны).
Устройство работает следующим образом.
Уменьшение периода и амплитуды колебаний груза на канате стрелового крана, вызванные внешними возмущающими факторами, возможно при выполнении оператором строительного крана следующих действий. Располагая сведениями о массе поднимаемого груза m2 и высоте подъема груза l, оператор по таблице, расположенной на панели управления, определяет массу балластного груза m1 и его место расположения по длине подвеса, то есть соотношение l1/l2, обеспечивающие наименьший период колебаний груза на канате строительного крана. Для осуществления одновременного передвижения вниз рабочих ветвей 6 грузового каната 7 с грузозахватным устройством (или монтируемым грузом) и направляющего троса 13 с балластным грузом-основанием 17 (скорости передвижения ветвей 6 грузового каната 7 и направляющего троса 13 равны), одновременным приводом в действие рычага управления (рычаг находится в кабине оператора) опускания монтируемого груза (или грузозахватного органа) оператор дает команду на электромагнитные замки 18 балластного груза-основания 17 нажатием кнопки 38. При нажатии последней загорается индикаторная лампочка 39, световой сигнал которой свидетельствует о том, что сердечники 19 электромагнитные замков 18 уже не фиксируют исходное положение балластного груза основания 17, и пазы 20 последнего свободны. Сразу же после нажатия кнопки управления 38 оператор переводит тумблер 37 из нейтрального положения в положение “движение вниз”. При этом сигнал с тумблера 37 передается на лебедку 8 с тормозным устройством 9. Последний растормаживается в автоматическом режиме, и направляющий трос 13 вместе с балластным грузом-основанием 17 начинает движение вниз, переходя с барабана 12 через обводной ролик 26, позволяющий сохранять направляющему тросу 13 всегда срединное положение относительно рабочих ветвей 6 грузового каната 7. При этом счетчик расхода троса 28, связанный через зубчатую передачу 27 с обводным роликом 26, контактирующим с направляющим тросом 13, передает информацию на информационное табло 36 командоаппарата 1. На информационном табло 36 командоаппарата 1 появляется информация о длине l1, на которой в данный момент времени находится балластный груз-основание 17. Как только на информационном табло 36 появится значение l1, соответствующее выбранному оператором по таблице (например, по предлагаемой таблице), тумблер 37 переводится в нейтральное положение. При переводе тумблера 37 в нейтральное положение разматывание направляющего троса 13 прекращается, поскольку автоматически срабатывает тормозное устройство 9 лебедки 8. После чего оператор нажимает кнопку управления 38, соответствующую управлению балластным грузом-основанием 17, и индикаторная лампочка 39 гаснет. Движение рабочих ветвей 6 грузового каната 7 продолжается до достижения грузозахватным устройством или монтируемым элементом места строповки или расстроповки.
В случае необходимости увеличения массы m1, то есть в дополнительном балластном грузе (дополнительных балластных грузах), оператор нажатием кнопки управления 38, соответствующей очередному рабочему балластному грузу 21, приводит в работу сердечники 19 электромагнитных замков 19, высвобождающих балластный груз 21, установленный в корпусе 2. Таким образом, освобожденными от сердечников 19 становятся пазы 20 как балластного груза-основания 17, так и рабочего балластного груза 21. При этом индикаторные лампочки 39 при кнопках управления 38 балластным грузом-основанием 17 и рабочим балластным грузом 21 остаются включенными. Затем переводом тумблера 37 из нейтрального положения в положение “движение вниз” балластный груз-основание 17 вместе с рабочим балластным грузом 21 с помощью направляющего троса 13 начинают опускаться вниз так же, как это описано выше.
С целью обеспечения совместной работы рабочих ветвей 6 грузового каната 7, направляющего троса 13 и балластных грузов 21 необходимо закрепить последние с рабочими ветвями 6, например электромагнитными зажимами (на чертежах не показаны).
Для осуществления подъема строительного груза оператор через органы управления подъемом груза приводит в движение рабочие ветви 6 грузового каната 7 с одновременным движением с той же скоростью направляющего троса 13 вверх до высоты, требуемой условиями строительного производства. Затем контроллером по управлению грузовой тележкой 3 оператор перемещает последнюю по стреле строительного крана в место, соответствующее требуемому производством строительно-монтажных работ. После чего посредством операций, описанных выше, грузовой канат 7 вместе с монтируемым элементом опускается вниз, при этом гашение колебаний происходит за счет установленного на подвесе балластного груза. После демонтажа строительного груза процесс повторяется.
Изобретение относится к подъемно-транспортному машиностроению. Устройство содержит балластный груз и снабжено металлическим корпусом криволинейной формы, установленным шарнирно в нижней части грузовой тележки крана. В верхней части корпуса выполнены сквозные цилиндрические отверстия с полимерными втулками для рабочих ветвей грузового каната, расположенные симметрично относительно центральной оси устройства. Внутри корпуса в его верхней части жестко установлена лебедка с тормозным устройством, электроприводом и гибким кабелем, осуществляющим питание последнего. На барабан лебедки намотан направляющий трос, центрируемый посредством обводного ролика, связанного через зубчатую передачу со счетчиком расхода троса, при этом нижний конец последнего пропущен через отверстие в вертикальной штанге и жестко закреплен вместе с ней через пластину с упомянутым балластным грузом, образующим основание для установки на него дополнительных балластных грузов. Внутри корпуса в его нижней части жестко установлены электромагнитные замки, имеющие токоведущие элементы для подвода к ним питания, в балластных грузах выполнены пазы для сердечников электромагнитных замков и цилиндрические отверстия, расположенные соосно отверстиям в верхней части корпуса для прохождения рабочих ветвей грузового каната, и центральное отверстие для прохождения направляющего троса, выполненные с полимерными втулками. Нижняя часть втулок центрального отверстия выполнена конической, устройство снабжено командоаппаратом, имеющим информационное табло, подающее сведения о месте расположения балластного груза по длине грузового подвеса, поступающие от счетчика расхода троса, тумблер управления лебедкой и кнопки управления электромагнитными замками. Изобретение обеспечивает уменьшение периода и амплитуды колебаний груза. 2 з.п. ф-лы, 5 ил., 1 табл.
| ВАЙНСОН А.А., АНДРЕЕВ А.Ф | |||
| Крановые грузозахватные устройства | |||
| Справочник | |||
| - M.: Машиностроение, 1982, с.46 | |||
| Способ изготовления фасонных труб с чередующимися вогнутыми и выпуклыми участками профиля | 1984 |
|
SU1237283A1 |
| 1970 |
|
SU417364A1 | |
| Устройство для предотвращения раскачивания груза | 1976 |
|
SU563354A1 |
| Устройство для ограничения раскачивания груза | 1984 |
|
SU1212917A1 |

