Изобретение относится к области машиностроения и может быть использовано преимущественно для уменьшения раскачивания груза на канате строительного крана.
Известно гироскопическое трехстепенное устройство, содержащее корпус, маховик, равножесткий подвес, привод вращения маховика с кронштейном, датчики углов рассогласования и моментов и следящие приводы; подвес устройства выполнен в виде четырех растяжек, находящихся в плоскости маховика, проходящей через его центр тяжести, при этом точки крепления расположены симметрично оси вращения и попарно на равных расстояниях от осей подвеса (а.с. 356461, М.кл. G 01 С 19/22).
Устройство относится к области гироскопической техники и используется при проектировании инерционных систем угловой стабилизации и навигации объектов.
Недостатком данного устройства является сложность конструкции, и в связи с этим возможные трудности для обеспечения точности его выполнения.
Другим известным изобретением является аэродинамический стабилизатор-наводчик груза подъемного крана (Журнал "Строительные и дорожные машины", 1998, 1, с.17-19), содержащий многолопастную воздушную крыльчатку с быстроходным электроприводом. На корпусе стабилизатора по окружности расположены всасывающие и выхлопные отверстия. Отверстия могут перекрываться заслонками с электромагнитным приводом. Устройство содержит также датчик углового отклонения от вертикали и микропроцессорный блок управления стабилизацией и наводкой. Стабилизатор-наводчик груза имеет инфракрасные детекторы для приема управляющих сигналов, излучаемых ручным пультом управления, который находится у монтажника. Гашение свободных колебаний груза и его перемещение в горизонтальной плоскости в определенных пределах достигается периодическим изменением направления вектора тяги воздушной крыльчатки стабилизатора. Стабилизатор навешивают на крюк крана как сменное оборудование или при длительном использовании крепят непосредственно к крюковой обойме. Для навешивания грузозахватных приспособлений в нижней части стабилизатора имеется стандартный крюк.
Аэродинамический стабилизатор-наводчик груза позволяет сократить скорость и время наводки и установки монтируемого блока в проектное положение.
Недостатками данного устройства являются:
1. Использование стабилизатора-наводчика груза преимущественно направлено на гашение колебаний груза при строительстве высотных сооружений;
2. Следует отметить значительную дороговизну устройства (8-10% от стоимости строительного крана);
3. Сложность конструкции.
Наиболее близким к предлагаемому изобретению является поворотное грузозахватное устройство, выпускаемое фирмой "Пайнер" (ФРГ), содержащее асинхронный двигатель, статорная часть которого закреплена на валу, который через подпятник опирается на подвесную скобу, навешиваемую на переходное кольцо. В свою очередь переходное кольцо навешивается на крюк каната строительного крана. Роторная часть электродвигателя закреплена в корпусе, опирающемся на вал через подшипники качения, а выходной конец последнего, выполненный в виде замкнутой петли, используется для навески собственно грузозахватного устройства для груза. Питание роторной части электроэнергией осуществляется через гибкий кабель и кольцевые токосъемники (Вайнсон А.А., Андреев А.Ф. Крановые грузозахватные устройства. - Справочник. М.: Машиностроение, 1982, с.40 и 41).
Поворотное устройство позволяет ориентировать монтируемый груз в необходимое положение.
Недостатками изобретения являются:
1. Невозможность стабилизировать раскачивание груза в вертикальной плоскости;
2. Отсутствие в устройстве автоматического регулирования процессом уравновешивания груза на канате строительного крана.
Задачей изобретения является повышение эффективности гашения колебаний и удобства эксплуатации устройства за счет расширения его конструктивных особенностей.
Поставленная задача достигается тем, что в устройстве для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, статорная часть которого жестко закреплена на валу, опирающемся через подпятник на подвесную скобу, связанную через переходное кольцо с крюком крана, а роторная часть, питание которой осуществляется через гибкий кабель и кольцевые токосъемники, закреплена в корпусе, опирающемся на вал через подшипники качения, причем выходной конец вала выполнен в виде замкнутой петли для навески груза, согласно изобретению на валу установлен дополнительно асинхронный двигатель с возможностью вращения вала в сторону, противоположную вращению первого асинхронного двигателя, на корпусах асинхронных двигателей жестко закреплены расположенные взаимно перпендикулярно в горизонтальной плоскости две пары металлических стержней, на которых с возможностью перемещения по ним установлены грузила, при этом датчик углового отклонения груза от вертикали через микропроцессорный блок управления соединен с асинхронными двигателями.
Новые существенные признаки:
1. Устройство содержит дополнительно установленный асинхронный двигатель, статорная часть которого аналогично первому двигателю жестко закреплена на валу, а роторная его часть, питание которой осуществляется через гибкий кабель и кольцевые токосъемники, закреплена в корпусе, опирающемся на вал через подшипники качения.
2. Дополнительный асинхронный двигатель вращается относительно вертикальной оси в направлении, противоположном вращению первого.
3. Корпуса двигателей снабжены жестко на них закрепленными и расположенными в горизонтальной плоскости взаимно перпендикулярно двумя парами металлических стержней.
4. На металлических стержнях установлены с возможностью перемещения по ним грузила.
5. Устройство для гашения колебаний содержит датчик углового отклонения груза от вертикали.
6. Датчик углового отклонения груза от вертикали через микропроцессорный блок управления соединен с асинхронными двигателями.
Перечисленная совокупность признаков обеспечивает получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
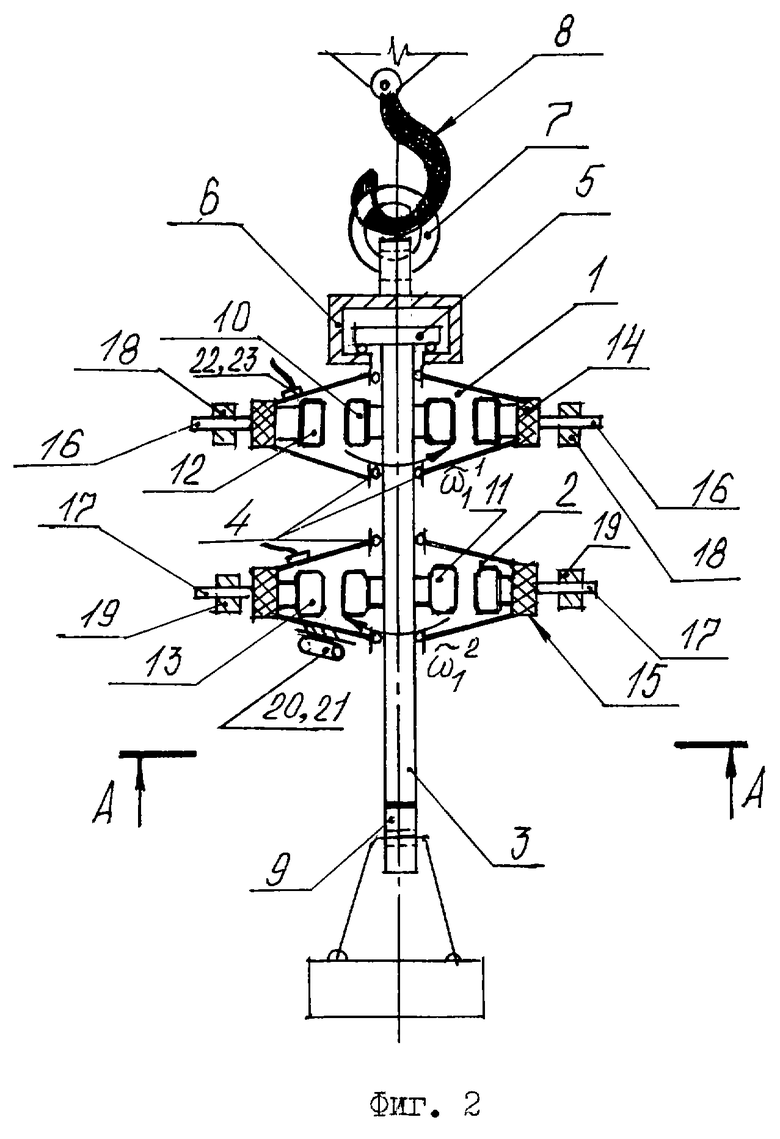
При сообщении оси устройства для гашения колебаний груза, подвешенного на канате строительного крана, в дальнейшем именуемого "устройство", принудительной прецессии ось "устройства" стремится кратчайшим путем установиться параллельно оси принудительной прецессии таким образом, чтобы направления векторов угловых скоростей "устройства"  и раскачивающегося каната
и раскачивающегося каната  совпали. Для чего "устройство" содержит два асинхронных двигателя, вращающихся относительно вертикальной оси в противоположных направлениях. В зависимости от направления угла отклонения строительного каната, а вместе с ним и груза, начинает вращение совместно с валом вокруг вертикальной оси один из асинхронных двигателей, соединенный с датчиком углового отклонения груза от вертикали через микропроцессорный блок управления. Роторные части асинхронных двигателей, вращающиеся с частотой, значительно превышающей угловую частоту вращения самой оси (каната строительного крана), имеют большой момент инерции относительно своей продольной оси, и за счет возникающего гироскопического эффекта канат строительного крана с подвешенным на нем грузом стремится вернуться в исходное положение. С целью регулирования момента инерции роторной части к корпусам асинхронных двигателей жестко присоединены и расположены в горизонтальной плоскости взаимно перпендикулярно металлические стержни, на которых с возможностью перемещения по ним могут быть установлены грузила различной геометрической формы и весом, необходимым для создания нужного момента инерции.
совпали. Для чего "устройство" содержит два асинхронных двигателя, вращающихся относительно вертикальной оси в противоположных направлениях. В зависимости от направления угла отклонения строительного каната, а вместе с ним и груза, начинает вращение совместно с валом вокруг вертикальной оси один из асинхронных двигателей, соединенный с датчиком углового отклонения груза от вертикали через микропроцессорный блок управления. Роторные части асинхронных двигателей, вращающиеся с частотой, значительно превышающей угловую частоту вращения самой оси (каната строительного крана), имеют большой момент инерции относительно своей продольной оси, и за счет возникающего гироскопического эффекта канат строительного крана с подвешенным на нем грузом стремится вернуться в исходное положение. С целью регулирования момента инерции роторной части к корпусам асинхронных двигателей жестко присоединены и расположены в горизонтальной плоскости взаимно перпендикулярно металлические стержни, на которых с возможностью перемещения по ним могут быть установлены грузила различной геометрической формы и весом, необходимым для создания нужного момента инерции.
Устройство для гашения колебаний груза, подвешенного на канате строительного крана, изображено на фиг. 1 - схема работы устройства; фиг.2 - общий вид; на фиг.3 - разрез А-А.
Устройство содержит два асинхронных двигателя 1, 2, статоры которых жестко закреплены на вертикальном валу 3 через подшипники качения 4. Вал 3 опирается через подпятник 5 на подвесную скобу 6, которая навешивается через переходное кольцо 7 на крюк 8 строительного крана. На валу 3, выходной конец которого выполнен в виде замкнутой петли 9 для навески груза, жестко закреплены статорные части 10, 11 каждого асинхронного двигателя, а роторные части 12, 13 закреплены в корпусах 14, 15 асинхронных двигателей. Статоры 10, 11 асинхронных двигателей 1, 2 позволяют вращать вал 3 относительно вертикальной оси в противоположных направлениях. В корпусах 14, 15 асинхронных двигателей жестко закреплены и установлены в горизонтальной плоскости взаимно перпендикулярно две пары металлических стержней 16, 17 с подвижно на них установленными грузилами 18, 19. Через микропроцессорный блок управления 20 датчик углового отклонения груза 21 от вертикали соединен, например, с асинхронными двигателями 1, 2. Питание электроэнергией роторной части осуществляется через гибкий кабель 22 и кольцевые токосъемники 23.
Устройство работает следующим образом.
Гашение колебаний груза происходит автоматически за счет команды с микропроцессорного блока 20, обрабатывающего сигналы датчика углового отклонения 21 груза от вертикали. В зависимости от того, в какую сторону произошло отклонение груза от вертикали, автоматически приводится в действие вращение одного из асинхронных двигателей 1, 2 в необходимом направлении. Частота вращения вала 3 и связанного с ним через замкнутую петлю 9 груза зависит от синхронной частоты вращения и соотношения моментов инерции статорных частей 10, 11 с грузом и роторных 12, 13 со стержнями 16, 17 и грузилами 18, 19 на них. Вращающиеся с высокой частотой роторные части 12, 13 двигателей имеют большой момент инерции относительно своей продольной оси за счет возникающего при этом гироскопического эффекта канат строительного крана с подвешенным на нем грузом стремится вернуться в исходное вертикальное положение. Момент инерции роторных частей 12, 13 при изменении веса монтируемых строительных конструкций можно регулировать за счет изменения расстояния между грузилами 18, 19 относительно друг друга либо перед началом процесса монтажа вручную, либо автоматически в процессе монтажа через блок дистанционного управления, находящийся у стропальщика, и микропроцессорный блок, установленный в предлагаемом устройстве. Кроме того, может быть предусмотрен сменный комплект грузил 18, 19 с различным весом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА КАНАТЕ СТРОИТЕЛЬНОГО КРАНА | 2004 |
|
RU2280607C2 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА РАБОЧИХ ВЕТВЯХ ГРУЗОВОГО КАНАТА СТРЕЛОВОГО КРАНА | 2002 |
|
RU2235054C2 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ И НАВОДКИ ПОДНЯТОГО КРАНОМ ГРУЗА | 1997 |
|
RU2141926C1 |
| Электропривод механизма подъема башенного крана с параметрическим управлением | 2017 |
|
RU2666494C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЗАЦИЕЙ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ДРОССЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2311725C1 |
| ШПИНДЕЛЬ-СТАБИЛИЗАТОР | 2002 |
|
RU2198280C1 |
| Шпиндель-амортизатор | 2002 |
|
RU2224865C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2205112C9 |
| СТРОП | 2000 |
|
RU2176980C1 |

Изобретение относится к области машиностроения и может быть использовано преимущественно для уменьшения раскачивания груза на канате строительного крана. Устройство содержит асинхронный двигатель, вращающийся относительно вертикальной оси, статорная часть которого жестко закреплена на валу, опирающемся через подпятник на подвесную скобу, связанную через переходное кольцо с крюком крана. Роторная часть, питание которой осуществляется через гибкий кабель и кольцевые токосъемники, закреплена в корпусе, опирающемся на вал через подшипники качения. Выходной конец вала выполнен в виде замкнутой петли для навески груза. На валу установлен дополнительно асинхронный двигатель с возможностью вращения вала в сторону, противоположную вращению первого асинхронного двигателя. На корпусах асинхронных двигателей жестко закреплены расположенные взаимно перпендикулярно в горизонтальной плоскости две пары металлических стержней, на которых с возможностью перемещения по ним установлены грузила. Датчик углового отклонения груза от вертикали через микропроцессорный блок управления соединен с асинхронными двигателями. Изобретение обеспечивает автоматическое регулирование процесса уравновешивания груза на канате башенного крана. 3 ил.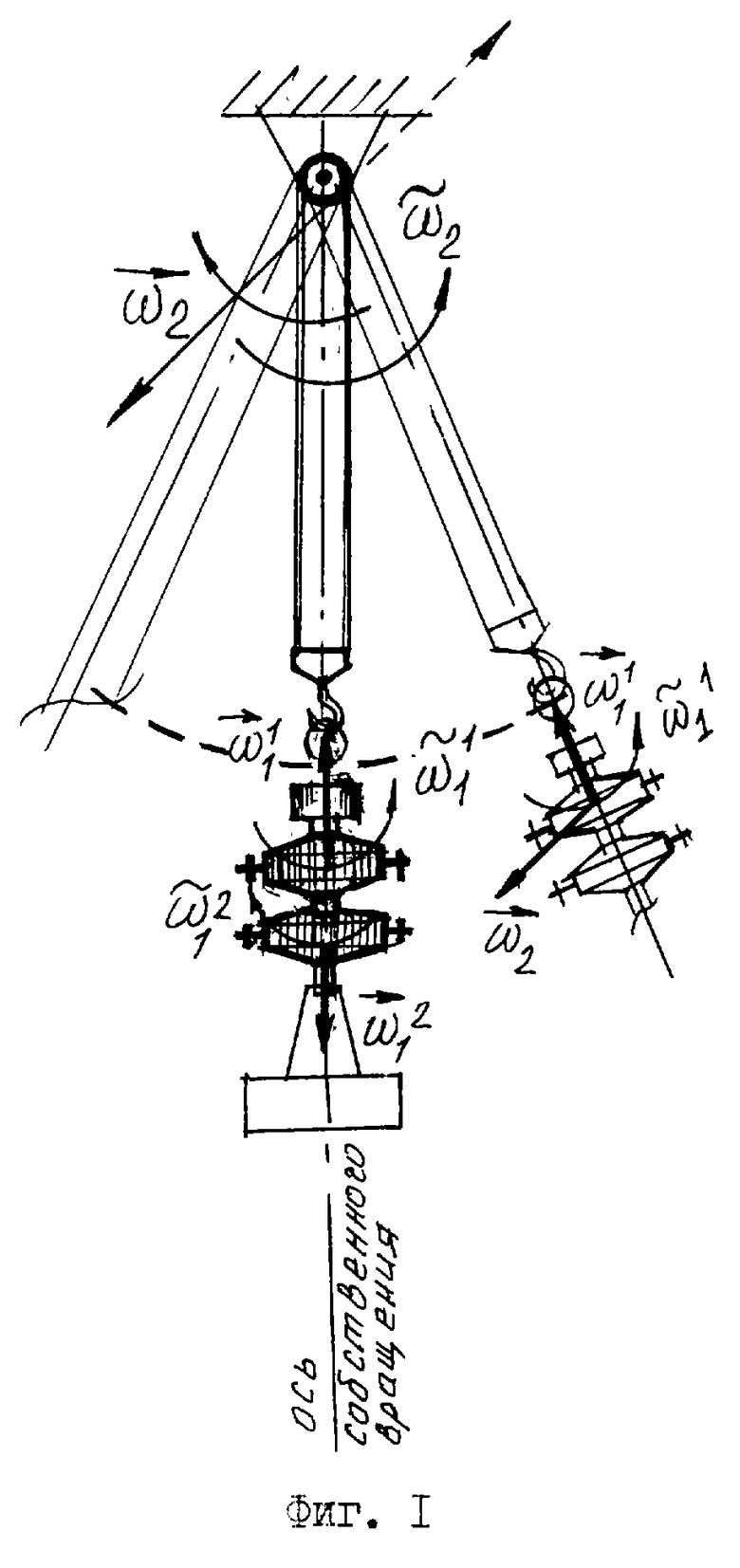
Устройство для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, статорная часть которого жестко закреплена на валу, опирающемся через подпятник на подвесную скобу, связанную через переходное кольцо с крюком крана, а роторная часть, питание которой осуществляется через гибкий кабель и кольцевые токосъемники, закреплена в корпусе, опирающемся на вал через подшипники качения, причем выходной конец вала выполнен в виде замкнутой петли для навески груза, отличающееся тем, что на валу установлен дополнительно асинхронный двигатель с возможностью вращения вала в сторону, противоположную вращению первого асинхронного двигателя, на корпусах асинхронных двигателей жестко закреплены расположенные взаимно перпендикулярно в горизонтальной плоскости две пары металлических стержней, на которых с возможностью перемещения по ним установлены грузила, при этом датчик углового отклонения груза от вертикали через микропроцессорный блок управления соединен с асинхронными двигателями.
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СВЕЧЕЙ | 1992 |
|
RU2041926C1 |
| Устройство для демпфирования колебанийгРузОзАХВАТНОгО ОРгАНА HA гибКОйпОдВЕСКЕ | 1979 |
|
SU796173A1 |
| Устройство для гашения колебаний грузозахватной траверсы | 1988 |
|
SU1527133A1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ И КОРОБЛЕНИЯ ПЛАСТИН | 1996 |
|
RU2097746C1 |

