Предлагаемое изобретение относится к области управления угловым движением самолета, рулевая поверхность которого разделена на несколько секций, элеронов (элевонов).
Наиболее близким по технической сущности и достигаемому эффекту (прототипом) является устройство управления приводами самолета [Система управления приводами в самолете. Патент RU 2237276 C1 МПК G06F 11/16 G05B 9/03 G05D 3/00 В64С 13/00 опубликовано 27.09.2004 г.], содержащее цифровую шину данных (В), датчики контроля параметров самолета (G), N сервоузлов (S) секций руля, каждый из которых состоит из привода (А) секции руля и вычислителя (С) с модулем формирования команд управления (F), модулем мажоритарной выборки (Н), функционального блока контроля (I), функционального блока контроля привода (J), программу внутреннего контроля (W). Вычислитель С в каждом сервоузле принимает через шину данных В команды управления приводом, определенные в одном дополнительном сервоузле S, а также рассчитывает команду управления для своего привода в F, выбирает исполнительную команду управления приводом в Н из принятых через шину данных и рассчитанном локально в сервоузле методом мажоритарной логики, управляет приводом А посредством исполнительной команды. Функциональный блок контроля I сравнивает исполнительную команду управления и локально рассчитанную команду управления и, если они отличаются, переводит привод в отказобезопасный режим. Программа внутреннего контроля W контролирует функциональные возможности вычислителя и, в случае ошибки, выдает информацию функциональному блоку контроля I для перевода привода в отказобезопасный режим. Функциональный блок контроля привода J проверяет функционирование привода А с помощью моделирования и при обнаружении сбоя привода также выдает информацию функциональному блоку контроля I для перевода привод в отказобезопасный режим.
Недостатком устройства является низкая устойчивость и управляемость самолета, обусловленное отсутствием точного определения углов положения поверхностей каждой секции руля и учета их в случае отказа/заклинивания секции при формировании команд управления для приводов, а также низкая отказоустойчивость системы управления самолетом и прекращение работы сервоузла устройства при сбоях работы формирователей команд управления в вычислителях.
Все это снижает характеристики устойчивости и управляемости самолета, а также отказоустойчивость системы управления.
Техническим результатом изобретения является повышение устойчивости и управляемости самолета при отказе/заклинивании секции руля за счет формирования индивидуальных команд управления для каждой исправной секции многосекционного руля с учетом углового положения отказавшей секции, а также повышение отказоустойчивости устройства управления за счет формирования команд управления каждым вычислителем, размещенным локально в каждом сервоузле, для всех приводов секций руля.
Указанный технический результат достигается тем, что в известное устройство управления приводами многосекционного руля самолета, содержащее общую шину данных, K датчиков контроля параметров самолета, N сервоузлов секций руля, каждый из которых состоит из привода секции руля и вычислителя, который в свою очередь состоит из модуля формирования команд управления, модуля мажоритарной выборки, модуля контроля, при этом датчики контроля параметров самолета соединены через общую шину данных с вычислителями сервоузлов, в каждом вычислителе сервоузла первый вход модуля мажоритарной выборки соединен через общую шину данных с первым выходом минимум одного модуля формирования команд вычислителя другого сервоузла, второй вход - со вторым выходом модуля формирования команд своего вычислителя и вторым входом модуля контроля, а выход - с первым входом привода секции руля и первым входом модуля контроля, при чем выход модуля контроля подключен ко второму входу привода секции руля, согласно изобретению в состав каждого привода секции руля дополнительно введен датчик углового положения [Галкин Е.Ф., Шабалов П.Г. Учебное пособие: Агрегаты и режимы работы систем автоматического управления. Самара: СГАУ, 2004. - 29 с. С-3] секции руля, при этом модуль формирования команд управления вычислителя каждого сервоузла через общую шину данных соединен вторым входом с датчиками контроля параметров самолета, третьим и четвертым входами - с первым и вторым выходами модулей контроля всех вычислителей сервоузлов, соответственно, третий вход модуля контроля подключен к датчику углового положения секции руля, а третий выход - ко второму входу привода сервоузла, первый вход модуля формирования команд управления является входом устройства.
Сущность изобретения заключается в том, что включение в состав каждого привода секции руля датчика углового положения позволит повысить точность определения угла секции руля к плоскости крыла по сравнению с «контролем с помощью моделирования», реализованного в устройстве-прототипе, своевременно обнаружить отказ/заклинивание привода секции руля и формировать индивидуальные команды управления для каждой исправной секции многосекционного руля, с учетом углового положения отказавшей секции и возникающего при этом моменте, что в свою очередь позволит повысить устойчивость и управляемость самолета. Формирование команд управления в каждом вычислителе сервоузла секции руля не только для своего локального привода, но и для всех остальных приводов многосекционного руля обеспечит повышение отказоустойчивости устройства управления при сбоях/отказах работы формирователей команд управления в вычислителях.
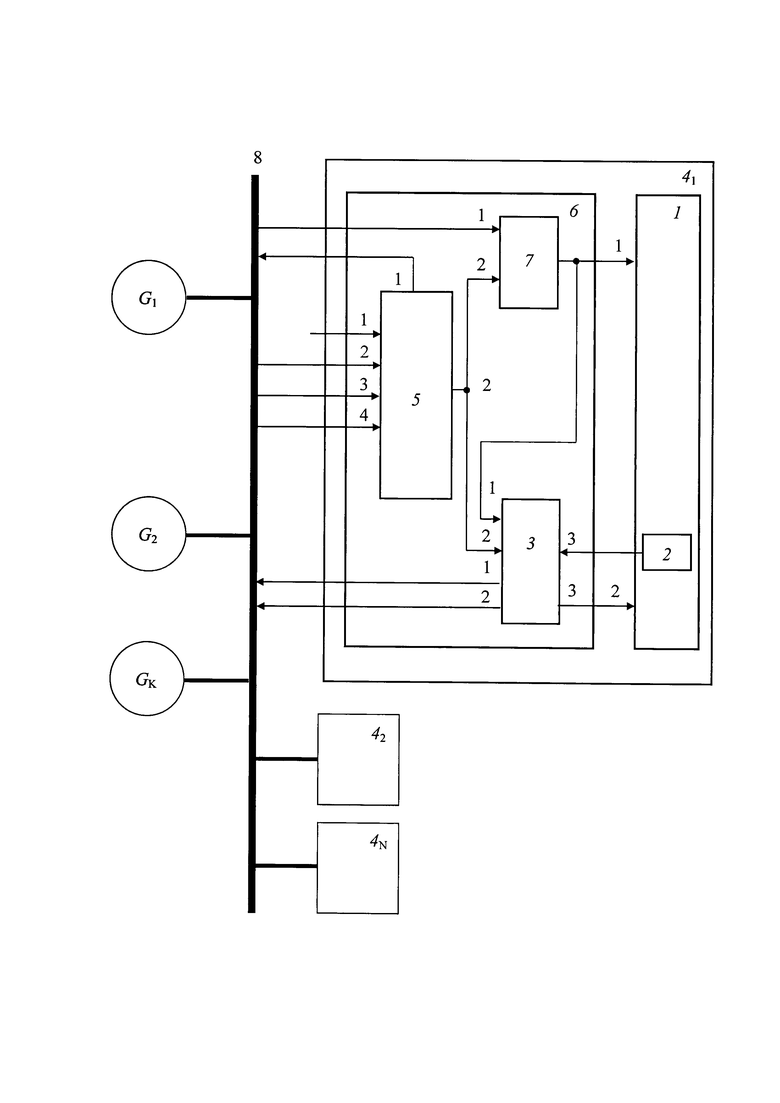
Структурная схема предлагаемого устройства приведена на фигуре, где обозначено 1 - привод секции руля, 2 - датчик углового положения секции руля, 3 - модуль контроля, 4 - сервоузел секции руля, 5 - модуль формирования команд управления, 6 - вычислитель, 7 - модуль мажоритарной выборки, 8 - общая шина данных.
Устройство работает следующим образом.
1) По общей команде/закону управления рулем самолета, поступающей на первые входы модулей формирования команд 5 вычислителей 6 каждого сервоузла 4, в них, с учетом информации об исправности каждого привода (или отказа кого-то из них) на третьем входе и углового положения секции руля на четвертом входе, рассчитывают индивидуальные команды управления для каждого исправного привода [Способ управления многосекционным рулем летательного аппарата. Патент RU 2697634 С2, МПК G05D 1/00 В64С 13/00, опубликовано 15.09.2019 г.], которые подают на входы модулей мажоритарной выборки 7 вычислителей каждого сервоузла. То есть каждый модуль формирования команд рассчитывает индивидуальные команды управления для своего локального привода (выход 2 модуля 5) и для всех остальных приводов секций руля (выход 1 модуля 5). Поступление индивидуальных команд управления на входы модуля мажоритарной выборки 7 (на первый вход поступают команды управления от вычислителей других сервоузлов, на второй вход - от модуля 5 своего вычислителя), рассчитанных конкретно для привода данной секции руля, обеспечит устойчивую работу модуля 7, который, в соответствии с мажоритарной логикой, работает по «большинству», то есть на выход подается тот сигнал, который совпадает с большинством присутствующих на входе сигналов. Особенно это важно при наличии отказов/сбоев модулей 5, что позволяет мгновенно их парировать. С выхода модуля 7 исполнительную команду управления подают на первый вход привода секции руля 1 и на первый вход модуля контроля 3 своего сервоузла. Наличие обратной связи через датчик углового положения секции руля 2 на входе 3 модуля 3 позволяет следить за реакцией привода на исполнительную команду управления с выхода модуля мажоритарной выборки 7. Адекватная реакция привода означает его исправность, информация о которой с первого выхода модуля 3 подают через общую шину данных 8 на третьи входы модулей формирования команд управления вычислителей всех сервоузлов. Кроме того, со второго выхода модуля 3 информацию об угловом положении плоскости секции через общую шину данных 8 выдают на четвертые входы модулей 5 вычислителей всех сервоузлов. При наличии исполнительной команды на входе 1 и исправности привода секции руля с выхода три модуля 3 выдают сигнал на второй вход привода секции руля для отработки исполнительной команды управления.
Если команды управления на входах модуля 7 отсутствуют или они не совпадают, то на выход модуля 7 выдается сигнал «отказ». При наличии сигнала «отказ» на первом входе модуля 3 или неадекватной реакции привода на исполнительную команду с выхода три модуля 3 снимают сигнал для отработки исполнительной команды управления и привод переходит в отказобезопасный режим.
2) При отсутствии общей команды вычислители 6 продолжают работать в штатном режиме и формировать команды управления в соответствии с полученной ранее общей командой.
3) При отказе/заклинивании какого-либо привода, информацию об отказе привода с первого выхода модуля 3 и угловом положении плоскости секции со второго выхода модуля 3 данного сервоузла подают через общую шину данных на третьи и четвертые входы каждого модуля 5. В модулях 5 с учетом полученной информации рассчитывают новые индивидуальные команды управления для оставшихся исправных приводов в соответствии с законами управления [Способ управления многосекционным рулем летательного аппарата. Патент RU 2697634 С2, МПК G05D 1/00 В64С 13/00, опубликовано 15.09.2019 г.] для парирования возникающего дополнительного момента отказавшей секции.
4) При сбое/отказе какого-нибудь модуля формирования команд управления 5, модуль мажоритарной выборки 7 после сравнения индивидуальной команды управления, выданной данным модулем 5, с индивидуальными командами, рассчитанными остальными модулями 5 для привода данной секции, пропускает ту команду управления, которая совпадает с большинством (по мажоритарной логике). Сервоузел, в котором отказал или дал сбой модуль 5, продолжает работать по командам управления от вычислителей других сервоузлов.
Выдача всем вычислителям общей команды (закона управления) руля самолета, наличие общей информации об исправности приводов и угловых положений каждой секции руля за счет ввода датчика углового положения секции руля позволяет рассчитать в них, а именно в модулях формирования команд управления, индивидуальные команды управления для каждого исправного привода и реализовать перспективный способ управления многосекционным рулем [Способ управления многосекционным рулем летательного аппарата. Патент RU 2697634 С2, МПК G05D 1/00 В64С 13/00, опубликовано 15.09.2019 г.], что обеспечит повышение устойчивости и управляемости самолета при отказе/заклинивании привода секции руля.
Кроме того, расчет в каждом исправном модуле формирования команд управления для каждого исправного привода индивидуальных команд управления позволяет устойчиво работать всему устройству управления приводами многосекционного руля при отказе нескольких модулей формирования команд управления, что обеспечит повышение отказоустойчивости устройства управления. При этом количество исправных модулей формирования команд управления 5 должно быть не меньше двух для реализации метода «мажоритарной выборки».
Назначение элементов ясны из названия и могут быть выполнены с использованием известных, выпускаемых промышленностью, элементов. Включенный в состав устройства датчик углового положения секции руля может быть выполнен, например, в виде потенциометра, движок которого связан с плоскостью секции руля и перемещается при поворотах вместе с ней.
Таким образом, заявленное устройство управления приводами многосекционного руля самолета обеспечивает повышение устойчивости и управляемости самолета при отказе/заклинивании секции руля за счет формирования индивидуальных команд управления для каждой исправной секции многосекционного руля с учетом углового положения отказавшей секции, а также повышение отказоустойчивости устройства управления за счет формирования команд управления каждым вычислителем, размещенным локально в каждом сервоузле, для всех приводов секций руля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОСЕКЦИОННЫМ РУЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2697634C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| Способ формирования отказоустойчивой комплексной системы управления (КСУ) и отказоустойчивая КСУ | 2016 |
|
RU2629454C2 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2527570C2 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ В САМОЛЕТЕ | 2001 |
|
RU2237276C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2011 |
|
RU2494006C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2503581C2 |
Устройство управления приводами многосекционного руля самолета содержит K датчиков контроля параметров самолета, соединенные общей шиной данных с N сервоузлов секций руля, каждый из которых содержит привод секции руля с датчиком углового положения секции руля и вычислитель, включающий модуль контроля, модуль формирования команд управления, модуль мажоритарной выборки, соединенные определенным образом. Обеспечивается повышение устойчивости и управляемости самолета при отказе/заклинивании секции руля за счет формирования индивидуальных команд управления для каждой исправной секции многосекционного руля с учетом углового положения отказавшей секции. 1 ил.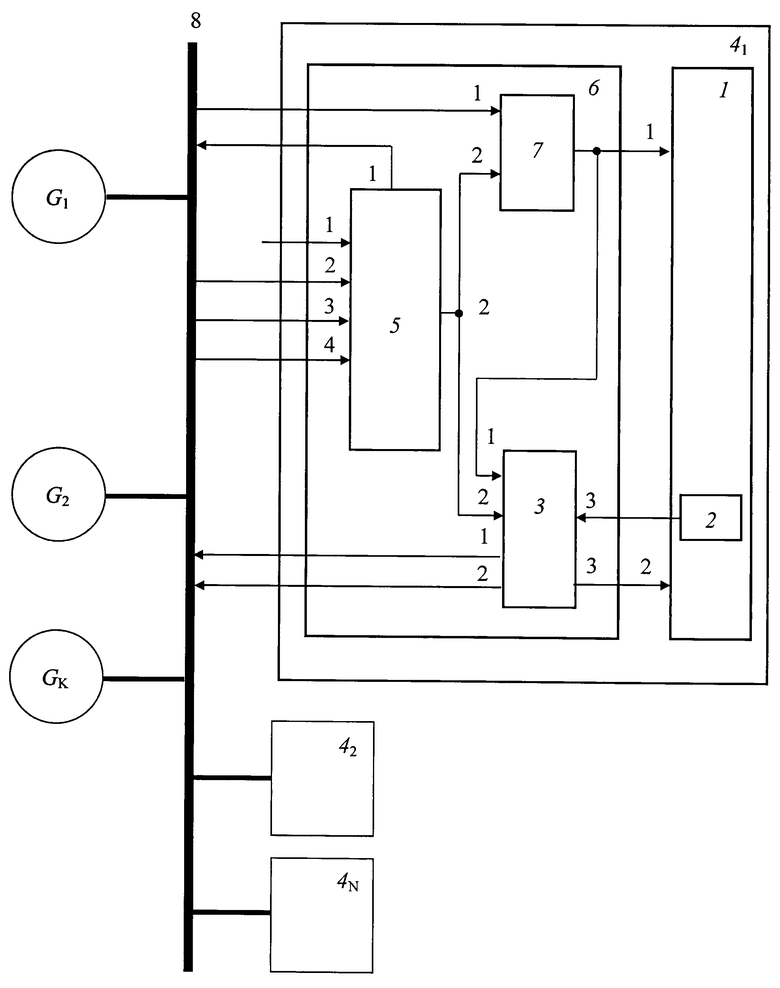
Устройство управления приводами многосекционного руля самолета, содержащее общую шину данных, K датчиков контроля параметров самолета, N сервоузлов секций руля, каждый из которых состоит из привода секции руля и вычислителя, который в свою очередь состоит из модуля формирования команд управления, модуля мажоритарной выборки, модуля контроля, при этом датчики контроля параметров самолета соединены через общую шину данных с вычислителями сервоузлов, в каждом вычислителе сервоузла первый вход модуля мажоритарной выборки соединен через общую шину данных с первым выходом минимум одного модуля формирования команд вычислителя другого сервоузла, второй вход - со вторым выходом модуля формирования команд своего вычислителя и вторым входом модуля контроля, а выход - с первым входом привода секции руля и первым входом модуля контроля, причем выход модуля контроля подключен ко второму входу привода секции руля, отличающийся тем, что в состав каждого привода секции руля введен датчик углового положения секции руля, при этом модуль формирования команд управления вычислителя каждого сервоузла через общую шину данных соединен вторым входом с датчиками контроля параметров самолета, третьим и четвертым входами - с первым и вторым выходами модулей контроля всех вычислителей сервоузлов, соответственно, третий вход модуля контроля подключен к датчику углового положения секции руля, а третий выход - ко второму входу привода сервоузла, первый вход модуля формирования команд управления является входом устройства.
| СПОСОБ УПРАВЛЕНИЯ МНОГОСЕКЦИОННЫМ РУЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2697634C2 |
| Способ управления полетом летательного аппарата | 2015 |
|
RU2617869C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| WO 1997033210 A1, 12.09.1997 | |||
| DE 69701085 D1, 10.02.2000. | |||
