Изобретение относится к комплексам и системам навигации (СН) летательных аппаратов (ЛА).
В наиболее близком аналоге, приведенном в книге [1] на стр.210-229, представлен комплекс начальной выставки (КНВ) инерциальной системы навигации (ИСН) ЛА, базирующейся на подвижном основании (корабле или другом ЛА). КНВ включает в себя выставляемую инерциальную систему навигации (ИСН-В), базовую систему навигации (СН-Б), установленную на подвижном объекте-носителе, блок формирования невязки, блок фильтрации, блок анализа состояния выставляемой системы.
Величины составляющих линейной скорости, измеряемые системами навигации СН-Б и ИСН-В, сравниваются (из составляющих скорости, полученных ИСН-В, вычитаются соответствующие составляющие скорости, полученные СН-Б), в результате чего формируются невязки, зависящие, наряду с другими факторами, от ошибок ориентации осей ИСН-В. Путем обработки этих невязок статистическими методами оптимальной и субоптимальной фильтрации получаются оценки ошибок ИСН-В, которые с помощью корректирующих сигналов обратной связи минимизируются, в результате чего оси выставляемой системы приходят в согласованное положение относительно осей базовой системы (с точностью до погрешностей начальной выставки).
Наиболее близкий аналог имеет ряд существенных недостатков, затрудняющих проведение качественной начальной выставки ИСН-В.
Во-первых, базовая система навигации не всегда обеспечивает полноту информации, необходимую для всесторонней качественной подготовки ИСН-В: так, например, корабельная СН-Б в силу специфики морской навигации (движение по поверхности океана), как правило, не имеет качественного вертикального канала и тем самым не обеспечивает процесс выставки информацией о высоте, вертикальной скорости и ускорении.
Во-вторых, места установки базовой СН (например, вблизи центра масс корабля) и выставляемой ИСН (например, на ЛА палубного базирования) значительно удалены друг от друга, вследствие чего деформации подвижного основания (например, корабля) вносят дополнительные ошибки в передачу информации от базовой СН на выставляемую систему, и величина этих ошибок может сделать комплекс начальной выставки малоэффективным и даже фактически неработоспособным. При этом деформации подвижного основания (например, корабля) могут представлять собой как короткопериодические (с секундными и минутными периодами) движения, так и длиннопериодические (с суточными, месячными и годовыми периодами).
В-третьих, при выставке на подвижном (например, качающемся) основании скорости, измеряемые базовой и выставляемой системами навигации, установленными в разных точках основания, принципиально различаются на величину относительной скорости этих точек. Это является источником дополнительных погрешностей выставки, величина которых может быть настолько значительной, что комплекс начальной выставки становится малоэффективным.
В-четвертых, специфика выставки ИСН на подвижном основании, например, на корабле в условиях взволнованного моря и, следовательно, быстроменяющихся скоростей и углов ориентации основания, а также требуемое малое время готовности ИСН предъявляют высокие требования к каналу передачи информации от базовой системы к выставляемой: по времени запаздывания передаваемой корректирующей информации, по частоте обновления информации, по форме представления информации, причем должное выполнение этих требований при коррекции от базовой СН объекта-носителя (например, корабля) является практически трудновыполнимым, вследствие чего эффективность комплекса начальной выставки существенно снижается.
Задачей изобретения является расширение функциональных возможностей комплекса начальной выставки на подвижном основании и, как следствие этого, повышение эффективности использования объектов, снабженных данным комплексом.
Достигается указанный результат тем, что комплекс, содержащий выставляемую инерциальную систему навигации, базовую систему навигации, установленную на подвижном объекте-носителе, блок формирования невязки, блок фильтрации, блок анализа состояния, причем выход выставляемой инерциальной системы навигации подключен к первому входу блока формирования невязки, выход блока формирования невязки подключен к простому входу блока фильтрации, простой выход блока фильтрации подключен к простому входу блока анализа состояния, вход/выход которого соединен с входом/выходом выставляемой инерциальной системы навигации, дополнительно снабжен промежуточной инерциальной системой навигации (ИСН-П), дополнительным блоком формирования невязки, дополнительным блоком фильтрации, дополнительным блоком анализа состояния, двумя блоками расчета движения основания, причем выход промежуточной инерциальной системы навигации подключен ко вторым входам обоих блоков формирования невязки и входам обоих блоков расчета движения основания, выход базовой системы навигации подключен к первому входу дополнительного блока формирования невязки, выход которого подключен к простому входу дополнительного блока фильтрации, простой выход блока фильтрации подключен к простому входу дополнительного блока анализа состояния, соединенному входом/выходом с входом/выходом промежуточной инерциальной системы навигации, вход/выход одного блока расчета движения основания подключен к входу/выходу блока фильтрации, вход/выход другого блока расчета движения основания подключен к входу/выходу дополнительного блока фильтрации.
На чертеже представлена блок-схема комплекса, содержащего:
1 - выставляемую инерциальную систему навигации ИНС-В;
2 - промежуточную инерциальную систему навигации ИНС-П;
3 - базовую систему навигации СН-Б;
4, 8 - блок анализа состояния АС;
5, 9 - блок формирования невязки ФН;
6, 10 - блок фильтрации БФ;
7, 11 - блок расчета движения основания РДО.
Информационная взаимосвязь блоков КНВ осуществляется по линиям информационного обмена (на чертеже обозначена тонкой сплошной линией).
Выход блока СН-Б 3 подключен к первому входу блока ФН 5, выход блока ФН 5 подключен к входу блока БФ 6. Выход блока БФ 6 подключен к входу блока АС 4, а вход/выход блока БФ 6 подключен к входу/выходу блока РДО 7. Вход/выход блока АС 4 подключен к входу/выходу блока ИСН-П 2. Выход блока ИСН-П 2 подключен к вторым входам блоков ФН 5, ФН 9 и входам блоков РДО 7, РДО 11. Выход блока ИСН-В 1 подключен к первому входу блока ФН 9. Выход блока ФН 9 подключен к входу блока БФ 10. Выход блока БФ 10 подключен к входу блока АС 8, а вход/выход блока БФ 10 подключен к входу/выходу блока РДО 11. Вход/выход блока АС 8 подключен к входу/выходу блока ИСН-В 1.
Блоки ИСН-В 1, ИСН-П 2 представляют собой системы инерциальной навигации, описанные в литературе, например [1], стр.6-20. В состав блоков ИСН-В 1 и ИСН-Б 2 входят чувствительные элементы (гироскопы и акселерометры), вычислители, устройства ввода-вывода информации. В блоках ИСН-В 1 и ИСН-П 2 с помощью определенным образом ориентированных акселерометров осуществляется измерение ускорений, путем интегрирования которых определяется вектор скорости, а двойного интегрирования - вектор положения блока. Гироскопы при этом используются либо как хранители направлений в пространстве для обеспечения гироскопической стабилизации платформы, на которой устанавливаются акселерометры, либо как измерители угловой ориентации или угловой скорости платформы с акселерометрами.
Блок СН-Б 3 представляет собой систему навигации объекта-носителя (например, корабля), описанную, например, в литературе [1], стр.20-23, 256-268, [3], стр.8-16, 171-243, 316-317, 325-327, 374-385. В состав блока могут входить: автономная система инерциальной навигации; гироазимут или гирокомпас; радиотехнические системы навигации, измеряющая дальности до нескольких наземных радиостанций, с помощью которых при известных координатах станций решается задача определения координат объекта; доплеровские измерители скорости, с помощью измеряемых доплеровских сдвигов частот излучаемых радиосигналов определяющие вектор скорости объекта; приемная аппаратура спутниковых радионавигационных систем, измеряющая временную задержку, фазовый сдвиг и доплеровский сдвиг частоты радиосигналов от космических спутников, с помощью которых при известных параметрах движения спутников решается задача определения времени, координат и скорости объекта.
Информационные линии связи представляют собой известные (описанные, например, в книге [2], стр.21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
Блоки АС 4, ФН 5, БФ 6, РДО 7, АС 8, ФН 9, БФ 10, РДО 11 выполнены, например, в виде однопроцессорных вычислителей ([2], стр. 31).
КНВ работает следующим образом. КНВ состоит из двух аналогичных контуров коррекции. Один контур включает в себя блоки: ИСН-В 1 (корректируемая система (КС)), ИСН-П 2 (корректор (КР)), АС 8, ФН 9, БФ 10, РДО 11 (система комплексной обработки информации (КОИ) корректора и корректируемой системы). Другой контур включает в себя блоки: ИСН-П 2 (корректируемая система (КС)), СН-Б 3 (корректор (КР)), АС 4, ФН 5, БФ 6, РДО 7 (система КОИ). Работа этих двух контуров полностью аналогична и заключается в следующем.
Блок AC 4 (AC 8) на основе анализа выходной информации блока БФ 6 (БФ 10) (включающей, например, корректирующие поправки для КС), выходной информации КС, включающей наряду с навигационной (например, углы ориентации, ускорения, скорости, координаты), также служебную информацию (например, сигналы исправности, готовности, признак режима подготовки, признак режима автономного счисления), идентифицирует состояние КС, в соответствии с которым организует взаимодействие соответствующих блоков комплекса. Так, например, при наличии в составе выходной информации КС признака наличия режима подготовки блок АС 4 (АС 8) подает на вход блока КС корректирующие поправки из блока БФ 6 (БФ 10); а например, при достижении по истечении известного времени подготовки корректирующими поправками заданных допустимых величин блок АС 4 (АС 8) формирует команду перевода КС в режим автономного счисления, которую подает на вход КС, после чего прекращает подачу на вход КС корректирующих поправок. Корректируемая система (ИСН-В или ИСН-П) при этом переходит в режим автономного счисления параметров движения объекта (например, ЛА или корабля).
В блок ФН 5 (ФН 9) поступает навигационная информация от двух систем навигации - корректируемой и корректора, - в виде многомерных векторов NКС и NКР соответственно. В состав вектора NКС входят определяемые в КС координаты, скорость и угловая ориентация объекта-носителя, в состав вектора NКР - те же параметры, но определяемые в КР. В блоке ФН 5 (ФН 9) строится векторная невязка Z как разность однотипных элементов векторов NКС и NКР (например, координат объекта, скорости объекта). Например, формирование невязок Zvξ, Zvη по скорости между двумя СН осуществляется с помощью формул вида
где  - составляющие вектора линейной скорости корректируемой СН вдоль горизонтальных осей Oξ и Оη;
- составляющие вектора линейной скорости корректируемой СН вдоль горизонтальных осей Oξ и Оη;
 - составляющие вектора линейной скорости корректирующей СН вдоль горизонтальных осей Oξ и Oη.
- составляющие вектора линейной скорости корректирующей СН вдоль горизонтальных осей Oξ и Oη.
Для контура коррекции выставляемой ИСН по информации промежуточной ИСН может быть использовано третье уравнение для невязки вертикальной составляющей скорости

где  - вертикальные скорости, определенные блоком ИСН-В 1 и ИСН-П 2 соответственно.
- вертикальные скорости, определенные блоком ИСН-В 1 и ИСН-П 2 соответственно.
Величины  содержат в своем составе точные значения скоростей
содержат в своем составе точные значения скоростей  и ошибки КС в их определении
и ошибки КС в их определении  :
:
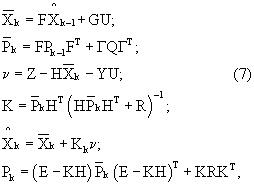
В блоке БФ 6 (БФ 10) осуществляется фильтрация этих невязок (см. [3], стр.391; [1], стр.26-28, 80-271) и получение корректирующих поправок для корректируемой системы навигации. Например, для этого в блоке БФ 6 (БФ 10) осуществляется обработка невязки Z по алгоритму нестационарной вычислительно-устойчивой фильтрации (см. [3], стр.40-45; [1], стр.96-108) и для каждого k-того момента времени формируется оценка вектора ошибок в виде

где  - прогнозируемое значение вектора ошибок КС в k-й момент времени;
- прогнозируемое значение вектора ошибок КС в k-й момент времени;
 - полученная оценка значения вектора ошибок КС в k-й момент времени;
- полученная оценка значения вектора ошибок КС в k-й момент времени;
U - вектор дополнительной информации о параметрах движения основания, поступающей из блока РДО 7 (РДО 11);
f() – функциональная зависимость, устанавливающая связь между полученной оценкой вектора ошибок корректируемой системы, с одной стороны, и прогнозируемой ее величиной, невязкой и дополнительной информацией, с другой стороны, реализуемая в блоке БФ6 (БФ 10).
В состав оцениваемого вектора ошибок Х входят, например, ошибки  ,
,  определения корректируемой ИСН горизонтальных скоростей в месте установки КС, ошибка
определения корректируемой ИСН горизонтальных скоростей в месте установки КС, ошибка  определения корректируемой ИСН вертикальной скорости в месте установки КС, углы αKC, βKC, δKC отклонения горизонтальных и вертикальной осей корректируемой ИСН от направлений вертикали и меридиана, дрейфы
определения корректируемой ИСН вертикальной скорости в месте установки КС, углы αKC, βKC, δKC отклонения горизонтальных и вертикальной осей корректируемой ИСН от направлений вертикали и меридиана, дрейфы  гироскопов корректируемой ИСН.
гироскопов корректируемой ИСН.
В состав вектора U дополнительной информации о параметрах движения основания входят, например, величины  производных по времени расстояний
производных по времени расстояний  ,
,  ,
,  между корректируемой и корректирующей системами, измеряемых вдоль горизонтальных и вертикальной осей. Изменения указанных расстояний происходят как вследствие деформаций основания, так и вследствие относительного движения основания (например, качки корабля).
между корректируемой и корректирующей системами, измеряемых вдоль горизонтальных и вертикальной осей. Изменения указанных расстояний происходят как вследствие деформаций основания, так и вследствие относительного движения основания (например, качки корабля).
Точные значения скоростей блока КС связаны со скоростями  ,
,  ,
,  блока КС связаны со скоростями измеренными корректирующей СН, соотношениями вида
блока КС связаны со скоростями измеренными корректирующей СН, соотношениями вида
где  ,
,  ,
,  - достаточно малые ошибки корректирующей СН.
- достаточно малые ошибки корректирующей СН.
(При этом третье уравнение может не иметь места, если корректор - СН-Б.)
Связь элементов вектора невязок Z и элементов векторов Х и U имеет, например, следующий вид:
В блоке БФ 6 (БФ 10) из невязок Z отфильтровываются ошибки ( ,
,  ) корректирующей системы, а за счет вектора U дополнительной информации, поступающей из блока РДО 7 (РДО 11), осуществляется разделение величин
) корректирующей системы, а за счет вектора U дополнительной информации, поступающей из блока РДО 7 (РДО 11), осуществляется разделение величин  ,
,  и
и  ,
,  .
.
Вид алгоритмов, реализующих указанные функциональные зависимости, может быть, например, следующий:
здесь  - прогнозируемое значение оцениваемого вектора ошибок КС в k-й момент времени;
- прогнозируемое значение оцениваемого вектора ошибок КС в k-й момент времени;
 - оценка значения вектора ошибок КС в k-й момент времени;
- оценка значения вектора ошибок КС в k-й момент времени;
 - прогнозируемое значение ковариационной матрицы вектора ошибок КС в k-й момент времени;
- прогнозируемое значение ковариационной матрицы вектора ошибок КС в k-й момент времени;
Рk - оценка ковариационной матрицы вектора ошибок КС в k-тый момент времени;
R, Q - ковариационные матрицы измерительных и входных шумов;
F, Г, Н, G, Y - матрицы модели ошибок.
Вид матриц F, Г, Н, G, Y полностью определяется видом дифференциальных уравнений изменения величин, включенных в состав вектора X, например: ошибок  ,
,  определения корректируемой ИСН горизонтальных скоростей в месте ее установки, ошибки
определения корректируемой ИСН горизонтальных скоростей в месте ее установки, ошибки  определения корректируемой СН вертикальной скорости в месте ее установки, углов αКС, βКС, δКС отклонения горизонтальных и вертикальной осей корректируемой ИСН от направлений вертикали и меридиана, дрейфов
определения корректируемой СН вертикальной скорости в месте ее установки, углов αКС, βКС, δКС отклонения горизонтальных и вертикальной осей корректируемой ИСН от направлений вертикали и меридиана, дрейфов  ,
,  ,
,  гироскопов корректируемой ИСН (см., например, [1], стр.109-110, 218).
гироскопов корректируемой ИСН (см., например, [1], стр.109-110, 218).
С выхода блока ИСН-П 2 в блок РДО 7 (и РДО 11) поступает вектор NП, содержащий, например, определяемые в ИСН-П 2 координаты, скорость и угловую ориентацию основания (например, корабля). В блоке РДО 7 (и РДО 11) решается задача определения параметров относительного движения основания (например, качки корабля) с помощью системы уравнений вида

где ωξ, ωη, ωζ - составляющие относительной угловой скорости основания (например, качки корабля).
Эти уравнения интегрируются одним из известных численных методов решения систем дифференциальных уравнений (см., например, [4], стр.905-909), например, методом Эйлера или методом Рунге-Кутта.
Составляющие ωξ, ωη, ωζ угловой скорости основания определяются либо в блоке ИСН-П 2, например, с помощью гироскопических датчиков угловой скорости (например, если промежуточная ИСН - бесплатформенная (бескарданная) - см. книгу [3], стр.379-381), либо в блоке РДО 7 (и РДО 11) расчетным путем с помощью формул вида
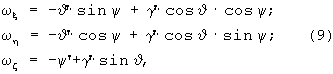
где ψ’, ϑ’, γ’ - производные углов ψ, ϑ, γ ориентации основания относительно осей Oξ, Oη, Oζ опорной горизонтальной системы координат, рассчитываемые в блоке РДО 7 (и РДО 11) одним из известных методов численного дифференцирования, описанным, например, в [4], стр.903-904.
Углы ψ, ϑ, γ входят в состав вектора NП.
Рассчитанные путем интегрирования уравнений (8) величины  ,
,  ,
,  уточняются по информации, поступающей в блок РДО 7 (РДО 11) из блока БФ 6 (БФ 10), например, в соответствии с зависимостями
уточняются по информации, поступающей в блок РДО 7 (РДО 11) из блока БФ 6 (БФ 10), например, в соответствии с зависимостями

где  - прогнозируемое с помощью уравнений (8) значение вектора RКС, составляющими которого являются величины
- прогнозируемое с помощью уравнений (8) значение вектора RКС, составляющими которого являются величины  ;
;
 - уточненное значение вектора RКС;
- уточненное значение вектора RКС;
К - коэффициент усиления, поступающий из блока БФ 6 (БФ 10);
ν - невязка, поступающая из блока БФ 6 (БФ 10).
Рассчитанные и уточненные величины вектора RКС и его производной, характеризующие относительное движение основания (например, качку корабля), из блока РДО 7 (РДО 11) поступают в блок БФ 6 (БФ 10).
Оценки вектора ошибок корректируемой системы из блока БФ 6 (БФ 10) через блок АС 4 (АС 8) поступают на вход блока ИСН-П 2 (ИСН-В 1) для их компенсации и приведения корректируемой системы (ИСН-П 2 или ИСН-В 1) в состояние, при котором эти ошибки минимальны.
Введение в состав КНВ блоков ИСН-П 2, ФН 5, БФ 6, АС 4, РДО 7, РДО 11 эффективно устраняет все отмеченные выше недостатки наиболее близкого аналога, тем самым повышая эффективность КНВ.
Так, например, известно (см., например, [3], стр.335, 337, 346), что в дифференциальные уравнения ошибок  ,
,  определения в ИСН-В скоростей объекта входят параметры вертикального движения: вертикальная скорость Vζ и вертикальное ускорение аζ, которые, как правило, отсутствуют в составе выходной информации блока СН-Б 3 (например, системы навигации корабля). По этой причине степень соответствия модели ошибок, используемая в алгоритмах КОИ наиболее близкого аналога, и реального поведения системы будет невысокой, и, соответственно, невысоким будет и качество выставки. Поэтому введение в состав КНВ блока ИСН-П 2, определяющего, наряду с горизонтальными скоростями и ускорениями, также вертикальные скорость и ускорение, устраняет этот недостаток наиболее близкого аналога.
определения в ИСН-В скоростей объекта входят параметры вертикального движения: вертикальная скорость Vζ и вертикальное ускорение аζ, которые, как правило, отсутствуют в составе выходной информации блока СН-Б 3 (например, системы навигации корабля). По этой причине степень соответствия модели ошибок, используемая в алгоритмах КОИ наиболее близкого аналога, и реального поведения системы будет невысокой, и, соответственно, невысоким будет и качество выставки. Поэтому введение в состав КНВ блока ИСН-П 2, определяющего, наряду с горизонтальными скоростями и ускорениями, также вертикальные скорость и ускорение, устраняет этот недостаток наиболее близкого аналога.
Во-вторых, введение в состав КНВ блока РДО 11 обеспечивает оценку параметров относительного движения выставляемой ИСН и системы навигации, по которой осуществляется выставка (в данном случае - ИСН-П). Это позволяет эффективно разделять собственные ошибки ИСН-В в определении скорости и добавочные приращения скоростей, вызванные относительными движениями основания (например, качкой корабля), в том числе и короткопериодических деформаций. Предложенный алгоритм работы блока РДО 11 предусматривает уточнение оценок относительного положения двух систем по результатам наблюдений динамики невязок, вследствие чего влияние длиннопериодических деформаций основания практически устраняется. Таким образом, введением в состав КНВ блока РДО 11 устраняются второй и третий из отмеченных недостатков наиболее близкого аналога.
В-третьих, введение в состав КНВ промежуточной ИСН (блока ИСН-П 2), имеющей сходную с ИСН-В внутреннюю структуру (обе системы относятся к классу инерциальных систем навигации) и, следовательно, форму представления информации, устраняет четвертый из отмеченных недостатков наиболее близкого аналога: позволяет выполнить высокие требования, предъявляемые к каналу передачи информации как по времени запаздывания передаваемой корректирующей информации, так и по частоте обновления информации и форме ее представления.
Очевидно, что дополнительно введенная в состав КНВ промежуточная система ИСН-П способна обеспечить все вышеперечисленные положения только в том случае, если будет обеспечена соответствующая начальная выставка самой ИСН-П по базовой СН (например, корабля), поэтому введение в состав КНВ блока ИСН-П 2 сопровождается введением в состав КНВ дополнительного контура коррекции, включающего в себя блоки АС 4, ФН 5, БФ 6, РДО 7, действия которых полностью аналогично действиям блоков АС 8, ФН 9, БФ 10, РДO 11.
Итак, введение в состав КНВ указанных новых блоков устраняет недостатки наиболее близкого аналога и расширяет функциональные возможности КНВ. На примерах технической реализации показано достижение технического результата в части расширения функциональных возможностей комплекса начальной выставки, а именно обеспечение качественной начальной выставки на подвижном основании, невозмущаемой деформациями и качкой основания, вследствие чего повышается эффективность применения объектов, оснащаемых комплексом.
ЛИТЕРАТУРА
1. Ривкин С.С., Ивановский Р.И., Костров А.В. Статистическая оптимизация навигационных систем. - Л.: Судостроение, 1976 г.
2. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г.
3. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г.
4. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1980 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| КОМБИНИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2654965C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232376C1 |
| СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА ПРИ ДВИЖЕНИИ ВНЕ АТМОСФЕРЫ | 1993 |
|
RU2062989C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
Изобретение относится к системам навигации летательных аппаратов (ЛА). Комплекс предназначен для обеспечения точной начальной выставки инерциальных систем навигации (ИСН) летательных аппаратов, базирующихся на подвижном относительно Земли основании (корабле, самолете-носителе). В состав комплекса входят выставляемая инерциальная система навигации ЛА, базовая система навигации объекта-носителя, промежуточная инерциальная система навигации, блоки формирования невязки, блоки расчета движения основания, блоки фильтрации, блоки анализа состояния. Комплекс содержит два контура коррекции. Один из них включает в себя базовую систему навигации объекта-носителя в качестве корректора и промежуточную инерциальную систему навигации в качестве корректируемой системы, а другой - промежуточную инерциальную систему навигации в качестве корректора и выставляемую инерциальную систему навигации ЛА в качестве корректируемой системы. Каждый контур коррекции включает в себя блок анализа состояния, блок формирования невязок, блок фильтрации, блок расчета движения основания. Специфика выставки ИСН на подвижном основании в условиях быстроменяющихся скоростей и углов предъявляет высокие требования к качеству внешней информации, передаваемой в выставляемую систему, такие как полнота информации, допустимое время запаздывания информации, частота обновления и передачи данных. Кроме того, чрезвычайно важным является требование минимизации времени выставки. Эффективное выполнение всех указанных требований осуществимо при введении в состав комплекса в качестве источника опорной корректирующей информации для выставляемой ИСН ЛА промежуточной ИСН, расположенной вблизи стартовой позиции ЛА на объекте-носителе и принадлежащей к классу точности не хуже, чем выставляемая ИСН. При этом выставка самой промежуточной ИСН осуществляется по информации базовой системы навигации объекта-носителя. Контуры коррекции выставляемой и промежуточной ИСН аналогичны и включают в себя блоки формирования невязок между корректором и корректируемой системой, блоки фильтрации и анализа состояния корректируемой системы. В контурах формируются невязки, путем фильтрации которых получаются оценки ошибок корректируемых систем. Эти оценки в виде сигналов обратной связи подаются на входы ИСН для их коррекции. Контуры коррекции дополнительно снабжены блоками расчета движения основания, в которых по информации промежуточной ИСН осуществляется оценка параметров движения основания, которая затем используется в алгоритмах фильтрации, тем самым значительно повышая их точность и эффективность. При этом движение основания (например, качка корабля) из возмущающего фактора становится полезной информацией, обеспечивающей проведение точной полномасштабной (как относительно вертикали, так и в азимуте) выставки инерциальной системы ЛА на подвижном основании. 1 ил.

Комплекс начальной выставки инерциальной системы, содержащий выставляемую инерциальную систему навигации, базовую систему навигации, установленную на подвижном объекте-носителе, блок формирования невязки, блок фильтрации, блок анализа состояния, причем выход выставляемой инерциальной системы навигации подключен к первому входу блока формирования невязки, выход блока формирования невязки подключен к входу блока фильтрации, выход блока фильтрации подключен к входу блока анализа состояния, вход/выход которого соединен с входом/выходом выставляемой инерциальной системы навигации, отличающийся тем, что он дополнительно снабжен промежуточной инерциальной системой навигации, дополнительным блоком формирования невязки, дополнительным блоком фильтрации, дополнительным блоком анализа состояния, двумя блоками расчета движения основания, причем выход промежуточной инерциальной системы навигации подключен ко вторым входам обоих блоков формирования невязки и входам обоих блоков расчета движения основания, выход базовой системы навигации подключен к первому входу дополнительного блока формирования невязки, выход которого подключен к входу дополнительного блока фильтрации, выход дополнительного блока фильтрации подключен к входу дополнительного блока анализа состояния, соединенного входом/выходом с входом/выходом промежуточной инерциальной системы навигации, вход/выход каждого блока расчета движения основания подключен к входу/выходу соответствующего блока фильтрации.
| РИВКИН С.С | |||
| и др | |||
| Статическая оптимизация навигационных систем | |||
| - Л.: Судостроение, 1976, с.210-229 | |||
| SU 1233623 A1, 20.05.1999 | |||
| СПОСОБ НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2002 |
|
RU2215994C1 |
| УСТРОЙСТВО ДЛЯ ВЫСТАВКИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ | 1986 |
|
RU1426192C |

