Изобретение относится к области управления и может быть использовано при непосредственном управлении полетами и в районе аэродрома и на трассах.
При управлении летательными аппаратами в районе аэродрома, которое выполняет группа руководства полетами, является задача выявления потенциальных конфликтных ситуаций (ПКС). Она может решаться на различных стадиях управления воздушным движением. В связи с этим могут использоваться те или иные способы анализа ПКС. Так, на этапах долгосрочного и предварительного планирования целесообразно учитывать изменения степени конфликтности воздушного движения по ожидаемому числу ПКС при изменении интенсивности воздушного движения. Поэтому в процессе текущего планирования и непосредственного управления воздушным движением (УВД) возникает необходимость определения конфликтующих пар или групп летательных аппаратов (ЛА) с оценкой параметров, характеризующих степень опасности ПКС, или времени, оставшегося до наступления опасного сближения.
Известен способ управления воздушным движением летательных аппаратов анализом ПКС (Тарасов В.Г. Основы теории автоматизированных систем управления. - М.: ВВИА им. Н.Е.Жуковского, 1988. – 438 с.), который разработан для автоматизированных систем предупреждения ПКС на основе концепции базы данных, содержащей и поддерживающей динамическую информационную модель воздушной обстановки. Сущность известного способа состоит в том, что информация о движении и местоположении летательных аппаратов, получаемая посредствам радиолокационных станции посадки (РСП), поступает на командно-диспетчерский пункт, где с помощью выносных индикаторов посадки (ВИСП) группа руководства полетами (ГРП) осуществляет выявление ПКС. Но при выявлении ПКС лица ГРП затрачивают неравномерные интервалы времени на обслуживание ЛА, что в конечном итоге влечет за собой снижение пропускной способности системы УВД, т.е. не обеспечивает рационального использования воздушного пространства. Данный способ, хотя и обеспечивает информационно-логическое моделирование воздушной обстановки для задачи анализа ПКС, однако этот способ управления имеет ряд существенных недостатков:
модель движения ЛА, соответствующая данному способу разработана для воздушных трасс;
применение данной модели для анализа ПКС в районе аэродрома не представляется возможным из-за существенного различия кинематических и динамических характеристик движения ЛА в районе аэродрома и на трассе;
область безопасности в данной модели представляется горизонтальной фигурой в виде окружности;
известный способ обеспечивает устранение ПКС только путем изменения модуля вектора скорости ЛА и не учитывает возможные способы разрешения ПКС управлением курсом ЛА, а также маневрированием по высоте;
известный способ не позволяет идентифицировать вид возникшей ПКС;
известный способ не учитывает неопределенность местоположения ЛА, обусловленную ошибками измерителей параметров движения ЛА.
Техническим результатом изобретения является повышение пропускной способности района аэродрома без снижения уровня безопасности полетов летательных аппаратов при непосредственном управлении воздушным движением.
Сущность изобретения состоит в том, что в способе управления воздушным движением летательных аппаратов в районе аэродрома, заключающемся в получении информации о местоположении ЛА в пространстве с помощью РСП, отображении информации на ВИСП, анализе информации группой руководства полетами и принятии решения по управлению летательными аппаратами, согласно изобретению информация от РСП поступает также на персональную электронно-вычислительную машину (ПЭВМ) с блоком программно-математического обеспечения (ПМО), выполняющую функции формирования управляющих воздействий и формирования графического отображения на мониторе ПЭВМ воздушной обстановки с учетом возникающих и прогнозируемых конфликтных ситуаций между летательными ЛА. При этом область безопасности вокруг ЛА представляется в виде эллипсоида вращения, с центром, совпадающим с геометрическим центром ЛА, и осями, соответствующими нормам эшелонирования в районе аэродрома.
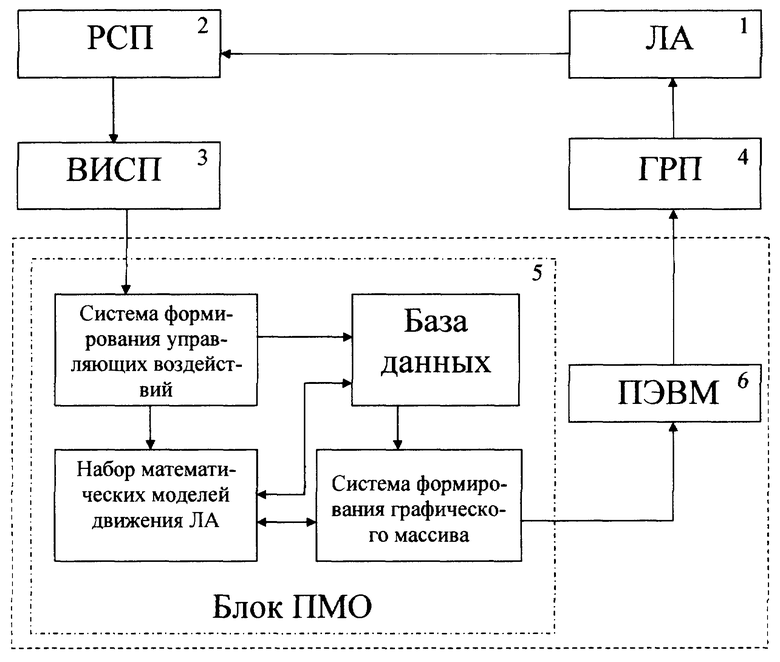
На чертеже изображена блок-схема реализации предложенного способа выявления потенциальных конфликтных ситуаций в районе аэродрома при непосредственном управлении полетами. Данная схема включает в себя: летательные аппараты (ЛА) - 1; радиолокационную систему посадки (РСП) - 2; выносные индикаторы системы посадки (ВИСП) - 3; персональную электронно-вычислительную машину (ПЭВМ) - 6; блок программно-математического обеспечения (ПМО) – 5; группу руководства полетами (ГРП) - 4.
Предложенный способ управления воздушным движением летательных аппаратов реализуется следующим образом.
Информацию о воздушной обстановке района аэродрома определяют посредством РСП. Оценка параметров движения ЛА и прогнозирования ИКС осуществляют блоком ПМО. На экране ПЭВМ формируется и отображается реальная воздушная обстановка с учетом возникающих конфликтных ситуаций. В состав ПМО входит база данных типовых потенциальных конфликтных ситуаций, возникающих при непосредственном управлении воздушным движением в районе аэродрома; система формирования управляющих воздействий, выдающая в зависимости от поступающей на вход ПМО информации о местоположении ЛА сигналы управления; набор математических моделей движения ЛА позволяющий спрогнозировать движение ЛА, в котором область безопасности вокруг ЛА представляется в виде эллипсоида вращения, с центром, совпадающим с геометрическим центром ЛА, и осями, соответствующими нормам эшелонирования в районе аэродрома, а также учитывающей область неопределенности местонахождения ЛА; система формирования графического массива. Блок ПМО на основании оценки и прогноза положения ЛА при движении по линиям заданного пути в районе аэродрома формирует на экране монитора реальную воздушную обстановку в районе аэродрома с отображением конфликтных и предконфликтных ситуаций.
Применение предложенного способа позволит снизить время выявления ПКС лицами группы руководства полетами, что приведет к увеличению пропускной способности аэродромной системы управления полетами без снижения уровня безопасности полетов, наиболее рационально распределять воздушного пространство между его потребителями. А учет области неопределенности местонахождения летательного аппарата позволяет наиболее точно определить момент возникновения ПКС.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Способ и устройство для управления движением на аэродроме | 2015 |
|
RU2634502C2 |
| Интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов | 2017 |
|
RU2668145C1 |
| Способ управления потоком взлетов и посадок летательных аппаратов и устройство для его осуществления | 2022 |
|
RU2788101C1 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 1998 |
|
RU2134910C1 |
| Способ предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей | 2020 |
|
RU2758526C1 |
Изобретение относится к области управления и может быть использовано при непосредственном управлении полетами и в районе аэродрома и на трассах. Сущность изобретения состоит в том, что в способе управления воздушным движением летательных аппаратов (ЛА) в районе аэродрома, заключающемся в получении информации о местоположении ЛА в пространстве с помощью радиолокационных станций посадки (РСП), отображении информации на выносных индикаторах системы посадки, анализе информации группой руководства полетами и принятии решения по управлению летательными аппаратами, согласно изобретению информация от РСП поступает также на персональную электронно-вычислительную машину (ПЭВМ) с блоком программно-математического обеспечения, выполняющую функции формирования управляющих воздействий и формирования графического отображения на мониторе ПЭВМ воздушной обстановки с учетом возникающих и прогнозируемых конфликтных ситуаций между ЛА. При этом область безопасности вокруг ЛА представляется в виде эллипсоида вращения, с центром, совпадающим с геометрическим центром ЛА, и осями, соответствующими нормам эшелонирования в районе аэродрома. Техническим результатом изобретения является повышение пропускной способности района аэродрома без снижения уровня безопасности полетов ЛА при непосредственном управлении воздушным движением. Применение предложенного способа позволит снизить время выявления потенциальных конфликтных ситуаций (ПКС) лицами группы руководства полетами, что приведет к увеличению пропускной способности аэродромной системы управления полетами без снижения уровня безопасности полетов, наиболее рационально распределять воздушное пространство между его потребителями. А учет области неопределенности местонахождения летательного аппарата позволяет наиболее точно определить момент возникновения ПКС. 1 ил.
Способ управления воздушным движением летательных аппаратов в районе аэродрома, заключающийся в получении информации о местоположении летательных аппаратов в пространстве с помощью радиолокационных систем посадки, отображении информации на выносном индикаторе системы посадки, анализе информации группой руководства полетами и принятии решения по управлению летательными аппаратами, отличающийся тем, что информация от радиолокационной системы посадки поступает также на персональную электронно-вычислительную машину с блоком программно-математического обеспечения, выполняющую функции формирования управляющих воздействий и формирования графического отображения на мониторе персональной электронно-вычислительной машины воздушной обстановки с учетом возникающих и прогнозируемых конфликтных ситуаций между летательными аппаратами, при этом область безопасности вокруг летательного аппарата представляется в виде эллипсоида вращения с центром, совпадающим с геометрическим центром летательного аппарата, и осями, соответствующими нормам эшелонирования в районе аэродрома.
| ТАРАСОВ В.Г | |||
| Основы теории автоматизированных систем управления | |||
| - М., ВВИА им | |||
| И.Е.Жуковского, 1988, с.438 | |||
| RU 13104 U1, 20.03.2000 | |||
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2001 |
|
RU2199719C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПОЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ "БАГИС-С" | 1995 |
|
RU2108613C1 |

