ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области навигации летательных аппаратов (ЛА) и предназначено для повышения пропускной способности аэродрома за счет упорядочивания потоков вылетающих и прилетающих ЛА с учетом их весовых характеристик.
Технической задачей является автоматическое вычисление оптимального порядка вылетов и прилетов ЛА по критерию максимальной пропускной способности аэродрома.
Технический результат предложенного способа и устройства заключается в повышении безопасности полетов и пропускной способности аэродрома.
УРОВЕНЬ ТЕХНИКИ
Известен способ организации потоков вылетающих воздушных судов в системе управления вылетами (Departure Manager - DMAN) [2], заключающийся в том, что на основе плановой информации и готовности ЛА к вылету вычисляются прогнозируемые времена вылетов ЛА. По прогнозируемым временам вылетов ЛА с учетом минимально допустимых временных интервалов между вылетающими ЛА вычисляются прогнозируемые очереди из ЛА на вылет в течение заданного ближайшего интервала времени. Вычисляется оптимальный по заданному критерию порядок ЛА в очереди. В соответствии с вычисленным порядком перерасчитываются расчетные времена вылетов ЛА. Расчетные времена вылетов передаются авиадиспетчеру, который учитывает их при определении последовательности вылетов ЛА (подтверждая расчетные времена или изменяя их). Расчетные времена вылетов передаются на борт ЛА и в другие системы, например, систему управления прилетами (Arrival Manager - AMAN).
Недостатком данного способа является снижение пропускной способности аэродрома из-за отсутствия учета оптимизации порядка прилетающих ЛА.
Известен метод полного перебора [3], с использованием которого можно найти оптимальный порядок очереди по заданному критерию.
Наиболее близким по технической сущности к заявляемому способу является способ организации потоков прибывающих воздушных судов в системе AMAN [1], заключающийся в том, что ЛА, при достижении заданного расстояния, например, 150-200 морских миль от аэропорта, захватывается на сопровождение. Данное расстояние принято называть горизонтом AMAN. С учетом плановой информации и информации наблюдения вычисляют прогнозируемое время прибытия захваченного на сопровождение ЛА. В зависимости от прогнозируемого времени прибытия и критериев оптимизации вычисляются расчетные (рекомендуемые) времена прибытия ЛА. Расчетные времена прибытия передают авиадиспетчеру, который учитывает их при определении последовательности посадок ЛА (подтверждая расчетные времена или изменяя их). Расчетные времена прибытия передаются на борт ЛА и в другие системы, например, DMAN.
Недостатком прототипа является снижение пропускной способности аэродрома из-за отсутствия учета оптимизации порядка вылетающих ЛА.
Наиболее близким аналогом предлагаемого устройства из числа известных технических решений является устройство управления воздушным движением [4], которое принято за прототип. Недостатком прототипа является то, что он снижает пропускную способность аэродрома.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Технический результат изобретения заключается в повышении безопасности полетов и пропускной способности аэродрома.
Технический результат достигается в способе тем, что задают расстояние захвата ЛА, осуществляющих посадку, на сопровождение, задают весовые и скоростные характеристики ЛА, задают минимальные допустимые временные интервалы между вылетающими и прилетающими ЛА, с учетом их весовых и скоростных характеристик, задают критерий оптимизации потока ЛА, задают ограничения максимально допустимого времени задержки прибывающих ЛА, принимают плановую информацию, принимают информацию наблюдения, захватывают ЛА на сопровождение, вычисляют прогнозируемое время посадки сопровождаемого ЛА на основе информации наблюдения и плановой информации, вычисляют расчетное время прибытия ЛА, на основе прогнозируемых времен посадок всех сопровождаемых ЛА, передают расчетные времена прибытия ЛА диспетчеру, ожидают подтверждения или изменения расчетных времен прибытия летательных аппаратов диспетчером, передают утвержденные и измененные диспетчером времена прибытия ЛА потребителям, причем перед приемом плановой информации и информации наблюдения, задают множество временных интервалов осуществления ключевых операций подготовки ЛА к вылету, задают информацию о количестве, размерах и расположении взлетно-посадочных полос и рулежных дорожек на аэродроме, задают максимально допустимое время задержки вылетающих ЛА, после получения плановой информации и информации наблюдения рассчитывают количество и порядок ЛА в очередях на вылет и посадку в течении всего анализируемого интервала времени, по данным о количестве и порядке ЛА в очередях на вылет и посадку, одновременно с вычислением расчетных времен прибытия ЛА, вычисляют времена занятия исполнительных стартов ЛА, с учетом минимально-допустимых временных интервалов между ЛА, с учетом их весовых и скоростных характеристик, информации о количестве, размерах и расположении взлетно-посадочных полос и рулежных дорожек на аэродроме, максимальных времен задержки прибывающих и вылетающих ЛА, оптимизируют порядок из прилетающих и вылетающих ЛА в очередях на занятие взлетно-посадочных полос по критерию минимального времени их занятия и перерасчитывают времена прохождения процедур подготовки ЛА к вылету и посадке, передают расчетные времена вылетов ЛА диспетчеру, ожидают подтверждения или изменения расчетных времен вылетов ЛА диспетчером, на основе утвержденных и измененных диспетчером времен исполнительных стартов ЛА рассчитывают моменты времен уборки колодок, запуска двигателей и другие ключевые временные моменты и передают их потребителям вместе с расчетными временами исполнительных стартов, за счет чего ЛА упорядочиваются таким образом, чтобы суммарное время занятия взлетно-посадочной полосы было минимальным, что позволяет увеличить пропускную способность аэродрома с сохранением требуемого уровня безопасности полетов.
Предлагаемое устройство содержит последовательно соединенные блок обработки данных наблюдения, блок контроля безопасности воздушного движения, блок построения 4Б-траекторий ЛА, модуль баз данных, автоматизированное рабочее место диспетчера, выход которого соединен со вторым входом модуля баз данных, третий вход которого соединен с первым выходом блока организации потоков воздушного движения, а второй выход со вторым входом блока построения 40-траекторий ЛА, третий выход с первым входом блока организации потоков воздушного движения, четвертый выход со входом блока обработки плановой информации, выход которого соединен со вторым входом блока организации потоков воздушного движения, второй выход блока обработки данных наблюдения соединен со вторым входом автоматизированного рабочего места диспетчера, третий вход которого соединен со вторым выходом блока контроля безопасности воздушного движения, третий выход которого соединен со входом блока обработки данных наблюдения.
Технический результат (в устройстве) достигается за счет введения в контур управления новых существенных отличий, заключающихся в том, что устройство дополнительно содержит блок обработки данных о подготовке ЛА к вылету, модуль маршрутизации летательных аппаратов и транспортных средств на аэродроме и блок оптимизации потока прилетающих и вылетающих летательных аппаратов, при этом выход блока обработки данных о подготовке летательных аппаратов к вылету соединен с первым входом модуля маршрутизации ЛА и транспортных средств на аэродроме, второй вход которого соединен со вторым выходом блока построения 4D-траекторий ЛА, первый выход с третьим входом блока построения 4D-траекторий ЛА, второй выход с четвертым входом автоматизированного рабочего места диспетчера, первый вход блока оптимизации потока прилетающих и вылетающих летательных аппаратов соединен с третьим выходом блока построения 4D-траекторий ЛА, первый выход с четвертым входом блока построения 4D-траекторий ЛА, второй выход с пятым входом автоматизированного рабочего места (АРМ) диспетчера, второй вход со вторым выходом блока организации потоков воздушного движения, третий выход с третьим входом блока организации потоков воздушного движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
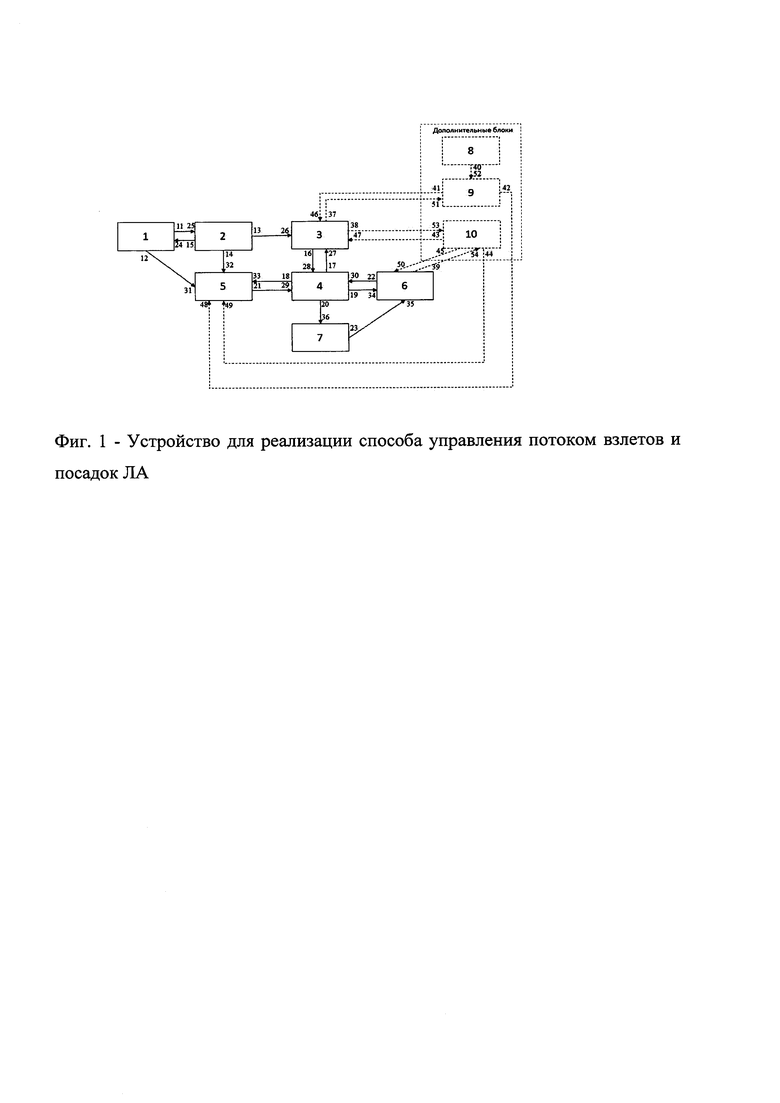
На фиг. 1 представлено устройство для реализации способа управления потоком взлетов и посадок ЛА и введены следующие обозначения:
1. блок обработки данных наблюдения;
2. блок контроля безопасности воздушного движения;
3. блок построения 4D-траекторий ЛА;
4. модуль баз данных;
5. АРМ диспетчера;
6. блок организации потоков воздушного движения;
7. блок обработки плановой информации;
8. блок обработки данных о подготовке ЛА к вылету;
9. модуль маршрутизации ЛА и транспортных средств на аэродроме;
10. блок оптимизации потока прилетающих и вылетающих ЛА;
11. первый выход блока обработки данных наблюдения;
12. второй выход блока обработки данных наблюдения;
13. первый выход блока контроля безопасности воздушного движения;
14. второй выход блока контроля безопасности воздушного движения;
15. третий выход блока контроля безопасности воздушного движения;
16. первый выход блока построения 4D-траекторий ЛА;
17. второй выход модуля баз данных;
18. первый выход модуля баз данных;
19. третий выход модуля баз данных;
20. четвертый выход модуля баз данных;
21. выход АРМ диспетчера;
22. первый выход блока организации потоков воздушного движения;
23. выход блок обработки плановой информации;
24. вход блока обработки данных наблюдения;
25. первый вход блока контроля безопасности воздушного движения;
26. первый вход блока построения 4D-траекторий ЛА;
27. второй вход блока построения 4D-траекторий ЛА;
28. первый вход модуля баз данных;
29. второй вход модуля баз данных;
30. третий вход модуля баз данных;
31. второй вход АРМ диспетчера;
32. третий вход АРМ диспетчера;
33. первый вход АРМ диспетчера;
34. первый вход блока организации потоков воздушного движения;
35. второй вход блока организации потоков воздушного движения;
36. вход блока обработки плановой информации;
37. второй выход блока построения 4D-траекторий ЛА;
38. третий выход блока построения 4D-траекторий ЛА;
39. второй выход блока организации потоков воздушного движения;
40. выход блока обработки данных о подготовке летательных аппаратов к вылету;
41. первый выход модуля маршрутизации ЛА и транспортных средств на аэродроме;
42. второй выход модуля маршрутизации ЛА и транспортных средств на аэродроме;
43. первый выход блока оптимизации потока прилетающих и вылетающих ЛА;
44. второй выход блока оптимизации потока прилетающих и вылетающих ЛА;
45. третий выход блока оптимизации потока прилетающих и вылетающих ЛА;
46. третий вход блока построения 4D-траекторий ЛА;
47. четвертый вход блока построения 4D-траекторий ЛА;
48. четвертый вход АРМ диспетчера;
49. пятый вход АРМ диспетчера;
50. третий вход блока организации потоков воздушного движения;
51. второй вход модуля маршрутизации ЛА и транспортных средств на аэродроме;
52. первый вход модуля маршрутизации ЛА и транспортных средств на аэродроме;
53. первый вход блока оптимизации потока прилетающих и вылетающих ЛА;
54. второй вход блока оптимизации потока прилетающих и вылетающих ЛА.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Предлагаемый способ осуществляют следующим образом:
1. задают расстояние захвата ЛА, осуществляющих посадку, на сопровождение, определяемое в соответствии с инструкцией по производству полетов в районе аэродрома;
2. задают весовые и скоростные характеристики для типов ЛА, осуществляющих взлет и посадку на аэродроме, в соответствии с базой данных аэронавигационной информации;
3. задают минимальные допустимые временные интервалы между моментами времен вылета и прилета ЛА, в зависимости от их весовых и скоростных характеристик, определяемые в соответствии с инструкцией по производству полетов в районе аэродрома;
4. задают критерии оптимизации потока ЛА, например, по максимальной пропускной способности аэродрома, и ограничения максимально допустимого времени задержки прибывающих ЛА, например, 30 мин.;
5. задают множество временных интервалов осуществления ключевых операций подготовки ЛА к вылету, определяемые в соответствии с инструкцией по производству полетов в районе аэродрома; данными интервалами являются: время технического осмотра ЛА, время буксировки ЛА, время осуществления противообледенительной обработки ЛА, время руления ЛА и др. Некоторые из перечисленных интервалов времени могут равняться нулю, если соответствующие процедуры не осуществляются;
6. задают информацию о количестве, размерах и расположении взлетно-посадочных полос и рулежных дорожек на аэродроме, на основе аэронавигационной информации, содержащей данные об аэродроме;
7. задают максимально допустимое время задержки вылетающих ЛА, например, 40 мин.;
8. задают интервал времени анализа воздушной обстановки, на котором проводится оптимизация потоков прибывающих и вылетающих ЛА, например, 180 мин.;
9. принимают плановую информацию, включающую следующие данные: номер рейса, тип ЛА, аэродромы вылета и прилета, плановая 4D траектория;
10. принимают информацию наблюдения и захватывают ЛА на сопровождение; информация наблюдения включает следующие данные: номер рейса, тип ЛА, текущие координаты ЛА, вектор текущей путевой скорости ЛА;
11. вычисляют прогнозируемое время посадки сопровождаемого ЛА на основе информации наблюдения и плановой информации, например, вычисляя допустимое максимально близкое к запланированному время посадки ЛА, с учетом его текущего местоположения и диапазона допустимых скоростей движения ЛА, данного типа, взятого из базы данных аэронавигационной информации;
12. вычисляют бесконфликтное расчетное время прибытия ЛА, на основе прогнозируемых времен посадок всех сопровождаемых ЛА, например, задерживая времена посадок ЛА таким образом, чтобы не было конфликтов с ЛА, имеющими более раннее время посадки и осуществляющими посадку на ту же взлетно-посадочную полосу (ВПП); при вычислении задержки учитывают нормы эшелонирования ЛА, в соответствии с их весовыми категориями, определенные в инструкции по производству полетов в районе аэродрома;
13. рассчитывают количество и порядок ЛА в очередях на вылет и посадку в течении заданного интервала времени анализа воздушной обстановки, например, итерационно с заданным шагом перебирая моменты времени, в пределах заданного интервала времени анализа воздушной обстановки, и вычисляя количество ЛА, чьи плановые времена вылета или посадки меньше анализируемого момента времени, а расчетные больше;
14. по данным о количестве и порядке ЛА в очередях на вылет и посадку, одновременно с вычислением расчетных времен прибытия ЛА, вычисляют расчетные времена занятия исполнительных стартов вылетающими ЛА;
15. с учетом минимально-допустимых временных интервалов между ЛА, с учетом их весовых и скоростных характеристик, информации о количестве, размерах и расположении взлетно-посадочных полос и рулежных дорожек на аэродроме, максимальных времен задержки прибывающих и вылетающих ЛА, оптимизируют порядок из прилетающих и вылетающих ЛА в очередях на занятие взлетно-посадочных полос по критерию минимального времени их занятия, например, методом полного перебора, выбирая последовательность с максимальным показателем эффективности по заданному критерию;
16. перерасчитывают времена прохождения ключевых процедур подготовки ЛА к вылету и посадке, например, последовательно вычитая в обратном порядке заданные интервалы времени прохождения ключевых процедур подготовки ЛА к вылету/посадке из момента прохождения сзади идущей процедуры, начиная с момента расчетного времени прибытия/вылета ЛА;
17. передают расчетные времена вылетов и прилетов ЛА диспетчеру, ожидают подтверждение или изменение расчетных времен вылетов и прилетов ЛА диспетчером, например, используя пользовательский интерфейс на автоматизированном рабочем месте диспетчера, позволяющий подтверждать и изменять расчетные времена вылетов и прилетов ЛА;
18. передают утвержденные и измененные диспетчером времена вылетов и прилетов ЛА потребителям, например, по локальной сети;
19. на основе утвержденных и измененных диспетчером времен исполнительных стартов ЛА рассчитывают моменты времен уборки колодок, запуска двигателей и другие ключевые временные моменты подготовки ЛА к вылету/прилету и передают их потребителям вместе с расчетными временами исполнительных стартов, например, по локальной сети.
В устройстве для осуществления способа согласно изобретению (фиг. 1) блок 1 обработки данных наблюдения передает в блок 2 контроля безопасности воздушного движения и на АРМ 5 диспетчера информацию наблюдения, после чего она отображается на АРМ 5 диспетчера. В блоке 2 контроля безопасности воздушного движения проводится оценка горизонтальных и вертикальных интервалов между ЛА и их сравнение с интервалами, определенными нормами эшелонирования, а также прогнозирование нарушения норм эшелонирования в течение заданного интервала времени. Блок 2 контроля безопасности воздушного движения передает в блок 1 обработки данных наблюдения, блок 3 построения 4D-траекторий ЛА и на АРМ 5 диспетчера информацию о текущих и прогнозируемых конфликтах между ЛА, после чего она отображается на АРМ 5 диспетчера. В блоке 3 построения 4D-траекторий ЛА после поступления информации о конфликтах между ЛА производится деконфликтизация 4D-траекторий ЛА. Из блока 3 построения 4D-траекторий ЛА передается информация о 4D-траекториях ЛА в модуль 4 баз данных, где производится сохранение информации. Для перерасчета 4D-траекторий ЛА блок 3 построения 4D-траекторий ЛА считывает их из модуля 4 баз данных. Блок 6 организации потоков воздушного движения считывает из модуля 4 баз данных информацию о 4D-траекториях ЛА и проводит корректировку потоков воздушного движения, в том числе изменяет интенсивности или структуру потоков, при наличии соответствующих разрешений, после чего передает информацию об изменениях в модуль 4 баз данных. Блок 7 обработки плановой информации считывает из модуля 4 баз данных информацию о 4D-траекториях ЛА и корректирует планы полетов, после чего передает откорректированные планы полетов в блок 6 организации потоков воздушного движения. Также по запросу от АРМ 5 диспетчера модуль баз данных выдает требуемые данные на АРМ 5 диспетчера. Блок 8 обработки данных о подготовке ЛА к вылету через пользовательские интерфейсы принимает от служб аэродрома информацию о прогнозируемых временах прохождения ЛА процедур подготовки к вылету и их завершении. Модуль 9 маршрутизации ЛА и транспортных средств на аэродроме принимает из блока 8 обработки данных о подготовке ЛА к вылету информацию о планируемом времени прохождения ЛА ключевых процедур подготовки к вылету, а также их завершении. В ключевые процедуры подготовки ЛА к вылету входят противообледенительная обработка, уборка колодок, запуск двигателей и т.д. Также модуль 9 маршрутизации ЛА и транспортных средств на аэродроме принимает информацию о плановых 4D-траекториях ЛА из блока 3 построения 4D-траекторий ЛА, перерассчитывает плановые 4D-траектории ЛА на этапе руления и передает обратно в блок 3 построения 4D-траекторий ЛА рекомендованные 4 В-траектории руления, одновременно передавая их на АРМ 5 диспетчера. Блок 10 оптимизации потока прилетающих и вылетающих ЛА принимает информацию о плановых 4D-траекториях ЛА из блока 3 построения 4 В-траекторий ЛА и информацию о потоках воздушного движения из блока 6 организации потоков воздушного движения, проводит оптимизацию порядка вылетов и прилетов ЛА по заданному критерию и передает рассчитанные рекомендованные времена вылетов и прилетов в блок 3 построения 4D-траекторий ЛА, АРМ 5 диспетчера и блок 6 организации потоков воздушного движения.
Структуру устройства можно упростить, связав все модули и блоки друг с другом через сервер базы данных, обеспечивающий безопасный и достаточно быстрый доступ модулей к базе данных. В таком случае будет отсутствовать необходимость в наличии связей между модулями, за исключением их связи с сервером.
Список литературы
1. Arrival Manager. Implementation Guidelines and Lessons Learned. Edition Number: 0.1 Edition date: 17 December 2010 / EUROCONTROL, 2010, 106 c.
2. E. Dubouchet, G. Mavoian, E. Page DOC 98-70-18 (Volume 5 of 10) PHARE Advanced Tools Departure Manager. Final Report PHARE/CENA/PAT-6.8.7.3.4/FR; 0.3 / EUROCONTROL, 1999, 44 c.
3. Thomas H. Cormen et al., Introduction to Algorithms. - MIT Press, 2001. - P. 1292. - ISBN 978-0-262-03384-8.
4. Патент RU 2746058 C1. СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ Опубликовано: 06.04.2021 Бюл. №10 https://patentimages.storage.googleapis.com/b8/73/19/4073c8d2c9dd39/RU2746058C1.pdf
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2020 |
|
RU2746058C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| Инструмент диспетчера для управления движением воздушных судов в зоне аэродрома | 1988 |
|
SU1569805A1 |
| Способ и система координирования и контроля полетов государственной авиации по использованию воздушного пространства | 2023 |
|
RU2838621C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НЕЗАВИСИМОГО ВОЗДУШНОГО НАБЛЮДЕНИЯ В ДАЛЬНЕЙ ЗОНЕ НАВИГАЦИИ | 2017 |
|
RU2663182C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПЛАНИРОВАНИЯ ПРИМЕНЕНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ГРУППЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2773453C1 |
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
| Мобильный полигонный пункт управления | 2022 |
|
RU2789919C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
Группа изобретений относится к способу и устройству для управления потоком взлетов и посадок летательных аппаратов (ЛА). Для управления потоком взлетов и посадок предварительно задают определенные параметры посадки, связанные с особенностями данного аэропорта, а также с типами и характеристиками приземляющихся ЛА, задают критерии оптимизации потока ЛА, принимают плановую информацию и информацию наблюдения, захватывают ЛА на сопровождение, вычисляют прогнозируемые параметры прибытия ЛА, передают информацию диспетчеру на утверждение или изменение, передают утвержденную диспетчером информацию потребителям. Для ЛА, готовящегося к вылету, рассчитывают временные параметры для вылета с учетом типа и характеристик ЛА, времени проведения технического осмотра и подготовки ЛА к вылету, времени пробега ЛА после старта, передают информацию диспетчеру для подтверждения или изменения и в случае подтверждения передают ее потребителям вместе с расчетными временами исполнительных стартов. Устройство содержит блок обработки данных наблюдения, блок контроля безопасности воздушного движения, блок построения 4D-траекторий ЛА, модуль баз данных, АРМ диспетчера, блок организации потоков воздушного движения, блок обработки плановой информации, блок обработки данных о подготовке ЛА к вылету, модуль маршрутизации ЛА и транспортных средств на аэродроме, блок оптимизации потока прилетающих и вылетающих ЛА, соединенные определенным образом. Обеспечивается повышение безопасности полетов и пропускной способности аэродрома. 2 н.п. ф-лы, 1 ил.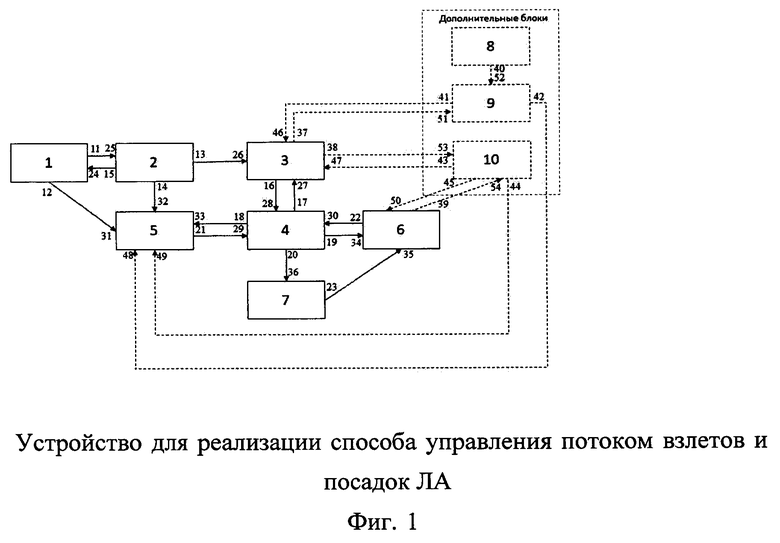
1. Способ управления потоком взлетов и посадок летательных аппаратов, заключающийся в том, что задают расстояние захвата летательных аппаратов, осуществляющих посадку, на сопровождение, задают весовые и скоростные характеристики летательных аппаратов, задают минимальные допустимые временные интервалы между вылетающими и прилетающими летательными аппаратами с учетом их весовых и скоростных характеристик, задают критерии оптимизации потока летательных аппаратов, задают ограничения максимально допустимого времени задержки прибывающих летательных аппаратов, принимают плановую информацию, принимают информацию наблюдения, захватывают летательный аппарат на сопровождение, вычисляют прогнозируемое время посадки сопровождаемого летательного аппарата на основе информации наблюдения и плановой информации, вычисляют расчетное время прибытия летательного аппарата на основе прогнозируемых времен посадок всех сопровождаемых летательных аппаратов, передают расчетные времена прибытия летательных аппаратов диспетчеру, ожидают подтверждения или изменения расчетных времен прибытия летательных аппаратов диспетчером, передают утвержденные и измененные диспетчером времена прибытия летательных аппаратов потребителям, отличающийся тем, что
перед приемом плановой информации и информации наблюдения задают множество временных интервалов осуществления ключевых операций подготовки летательных аппаратов к вылету,
задают информацию о количестве, размерах и расположении взлетно-посадочных полос и рулежных дорожек на аэродроме,
задают максимально допустимое время задержки вылетающих летательных аппаратов,
после получения плановой информации и информации наблюдения рассчитывают количество и порядок летательных аппаратов в очередях на вылет и посадку в течение всего анализируемого интервала времени,
по данным о количестве и порядке летательных аппаратов в очередях на вылет и посадку одновременно с вычислением расчетных времен прибытия летательных аппаратов вычисляют времена занятия исполнительных стартов летательных аппаратов,
с учетом минимально-допустимых временных интервалов между летательными аппаратами, с учетом их весовых и скоростных характеристик, информации о количестве, размерах и расположении взлетно-посадочных полос и рулежных дорожек на аэродроме, максимальных времен задержки прибывающих и вылетающих летательных аппаратов оптимизируют порядок из прилетающих и вылетающих летательных аппаратов в очередях на занятие взлетно-посадочных полос по критерию минимального времени их занятия и перерасчитывают времена прохождения процедур подготовки летательных аппаратов к вылету и посадке,
передают расчетные времена вылетов летательных аппаратов диспетчеру,
ожидают подтверждения или изменения расчетных времен вылетов летательных аппаратов диспетчером,
на основе утвержденных и измененных диспетчером времен исполнительных стартов летательных аппаратов рассчитывают моменты времен уборки колодок, запуска двигателей и передают их потребителям вместе с расчетными временами исполнительных стартов.
2. Устройство для осуществления способа по п. 1, содержащее последовательно соединенные блок (1) обработки данных наблюдения, блок (2) контроля безопасности воздушного движения, блок (3) построения 4D-траекторий летательных аппаратов, модуль (4) баз данных, автоматизированное рабочее место (5) диспетчера, а также блок (6) организации потоков воздушного движения и блок (7) обработки плановой информации, причем выход (21) автоматизированного рабочего места (5) диспетчера соединен со вторым входом (29) модуля (4) баз данных, третий вход (30) которого соединен с первым выходом (22) блока (6) организации потоков воздушного движения, а второй выход (17) со вторым входом (27) блока (3) построения 4D-траекторий летательных аппаратов, третий выход (19) с первым входом (34) блока (6) организации потоков воздушного движения, четвертый выход (20) со входом (36) блока (7) обработки плановой информации, выход (23) которого соединен со вторым входом (35) блока (6) организации потоков воздушного движения, второй выход (12) блока (1) обработки данных наблюдения соединен со вторым входом (31) автоматизированного рабочего места (5) диспетчера, третий вход (32) которого соединен со вторым выходом (14) блока (2) контроля безопасности воздушного движения, третий выход (15) которого соединен со входом (24) блока (1) обработки данных наблюдения, отличающееся тем, что дополнительно содержит блок (8) обработки данных о подготовке летательных аппаратов к вылету, модуль (9) маршрутизации летательных аппаратов и транспортных средств на аэродроме и блок (10) оптимизации потока прилетающих и вылетающих летательных аппаратов, при этом выход (40) блока (8) обработки данных о подготовке летательных аппаратов к вылету соединен с первым входом (52) модуля (9) маршрутизации летательных аппаратов и транспортных средств на аэродроме, второй вход (51) которого соединен со вторым выходом (37) блока (3) построения 4D-траекторий летательных аппаратов, первый выход (41) с третьим входом (46) блока (3) построения 4D-траекторий летательных аппаратов, второй выход (42) с четвертым входом (48) автоматизированного рабочего места (5) диспетчера, первый вход (53) блока (10) оптимизации потока прилетающих и вылетающих летательных аппаратов соединен с третьим выходом (38) блока (3) построения 4D-траекторий летательных аппаратов, первый выход (43) с четвертым входом (47) блока (3) построения 4D-траекторий летательных аппаратов, второй выход (44) с пятым входом (49) автоматизированного рабочего места (5) диспетчера, второй вход (54) со вторым выходом (39) блока (6) организации потоков воздушного движения, третий выход (45) с третьим входом (50) блока (6) организации потоков воздушного движения.
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2020 |
|
RU2746058C1 |
| US 20160210868 A1, 21.07.2016 | |||
| CN 103413462 A, 27.11.2013 | |||
| Способ получения (S)-альфа-этил-2-оксо-1-пирролидинацетамида | 1986 |
|
SU1428195A3 |
| JP 2004038802 A, 05.02.2004. | |||

