Изобретение относится к области электротехники и робототехники и может быть использовано как трехкоординатный двигатель различных узлов.
Известно устройство [патент РФ 2273000 С2, G01F 1/84 24.04.2002], содержащее катушку и два якоря, прикрепленные к двум расходомерным трубкам преобразователя, служащего для измерения параметров текучей среды. Катушка прикреплена к держателю, содержащему опорную пластину, которая установлена в плавающем состоянии на расходомерных трубках с помощью двух упругих ножек. Якоря имеют такую форму (например, чашеобразную) и так выровнены относительно друг друга, что магнитные поля, генерируемые устройством, сконцентрированы внутри этого устройства. В варианте выполнения устройство содержит вторую катушку. Преобразователь может представлять собой датчик Кориолиса для измерения массового расхода.
Недостатками данного устройства являются ограниченные функциональные возможности, связанные с уставкой координат колебаний и сложность конструкции.
Известен трехкоординатный позиционер [патент РФ 2297078 C1, H01L 41/09, 08.11.2005], состоящий из держателя объекта и корпуса. На корпусе закреплены три привода, содержащие по меньшей мере один биморфный элемент, соединенный посредством первого гибкого толкателя с подвижным элементом. В качестве биморфных элементов используют пакеты, каждый из которых содержит пьезоэлектрический диск, соединенный по плоскости с металлической мембраной. Держатель объекта установлен на подвижном элементе.
Недостатками данного устройства являются ограниченные функциональные возможности, связанные со сложностью уставки координат движения, а также сложность конструкции.
Известен трехкоординатный привод [патент РФ 2239906 С2, H01H 63/22, H01H 63/28, 20.12.2002], который может быть использован для дистанционного создания силового воздействия на несколько объектов, сосредоточенных в ограниченном пространстве, например для управления оболочкой, моделирующей и формирующей конфигурацию рельефов, а также для управления электромеханическими переключателями силовых цепей, в частности при управлении индивидуальными секциями багажных, контейнерных, сортировочных, банковских накопителей и гостиниц.
Недостатками данного устройства являются ограниченные функциональные возможности, связанные с ограниченностью уставки точной координаты движения, а также сложность конструкции.
Известна конструкция генератора [патент РФ 2402142 C1, H02K 35/02], содержащая корпус, индукционную систему из подвижной и неподвижной частей. Подвижная часть выполнена в виде четырех двухполюсных постоянных магнитов, закрепленных на упругих стержнях. Неподвижная часть состоит из четырех катушек, размещенных по периметру корпуса. Это позволяет генератору обеспечивать преобразование энергии возмущений внешней среды любого направления (например, вибраций) в электрическую энергию.
Недостатками такой конструкции являются ограниченные функциональные возможности, обусловленные областью применения и сложность применения данной конструкции в качестве трехкоординатного двигателя.
Известен трехкоординатный привод [заявка на патент РФ 2001102120 C2, H01H 63/22, 20.12.2002], содержащий кинематическую передачу, сочлененную с двигателями и множеством параллельно размещенных исполнительных резьбовых стоек, зафиксированных от вращения и снабженных гайками, зафиксированными от продольного смещения, и множеством элементов сцепления с упомянутой передачей и блоки: четырехпараметрической памяти, реверсивного управления, ввода и коррекции, многовходовым логическим элементом ИЛИ, координатным распределителем.
Недостатками такой конструкции являются ограниченные функциональные возможности, обусловленные областью применения, и сложность применения данной конструкции в качестве трехкоординатного двигателя.
Наиболее близкой по технической сущности к заявляемому является устройство для трехкоординатных перемещений [патент РФ 2150169 C1, H02N 2/02, H01L 41/09, 27.05.2000], которое содержит блок управления и электромеханический преобразователь, выполненный в виде многогранного угла, на внешних гранях которого выполнен общий сплошной электрод, а на внутренних гранях нанесены управляющие электроды, не менее одного на каждой грани. Управляющие электроды могут быть нанесены симметрично относительно вершины многогранного угла или каждый из управляющих электродов может быть нанесен симметрично относительно оси симметрии каждой грани, проходящей через вершину многогранного угла.
Недостатками данного устройства являются ограниченные функциональные возможности, связанные со сложностью уставки координат движения, а также сложность конструкции.
Задача изобретения - расширение функциональных возможностей и упрощение конструкции, благодаря применению в качестве электромеханического преобразователя трехкоординатного электромеханического двигателя.
Техническим результатом является возможность бесконтактного перемещения упругих стержней под действием электрического тока и возможность точной уставки координат перемещения и положения.
Указанная задача решается и технический результат достигается тем, что в устройстве трехкоординатных перемещений, содержащем блок управления, корпус, электромеханический преобразователь, согласно изобретению, электромеханический преобразователь выполнен в виде трехкоординатного электромеханического двигателя, содержащего индукционную систему из подвижной и неподвижной частей, при этом подвижная часть выполнена в виде четырех двухполюсных постоянных магнитов, закрепленных на упругих стержнях и установленных с угловым смещением относительно неподвижной, а неподвижная часть состоит из четырех катушек, размещенных по периметру корпуса.
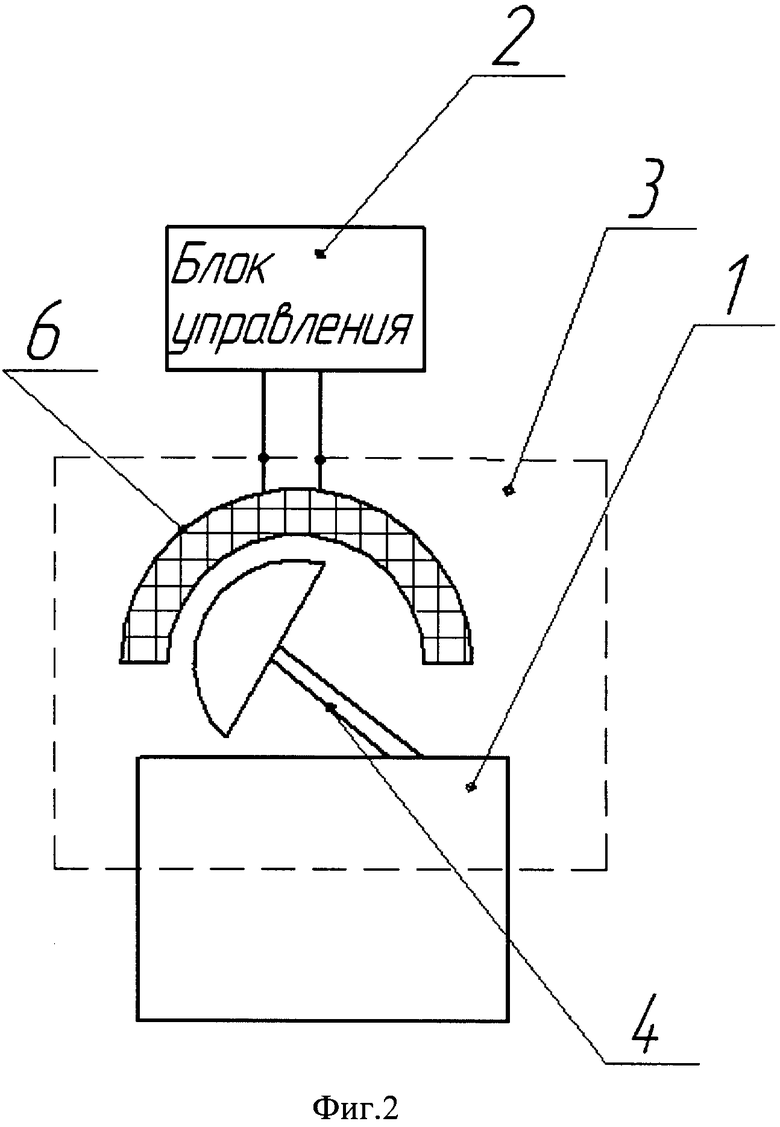
Существо изобретения поясняется чертежами. На фигуре 1 изображен вид сверху устройства трехкоординатных перемещений. На фигуре 2 изображен вид сбоку устройства трехкоординатных перемещений.
Предложенное устройство содержит (фиг.1): корпус 1, блок управления 2, электромеханический преобразователь 3, установленный в корпусе 1, состоящий из горизонтальной подвижной части 4 и вертикальной подвижной части 5 (фиг.2), которые представляют собой два двухполюсных постоянных магнита, жестко закрепленных на упругих стержнях и установленных с угловым смещением относительно катушек 6, 7, установленных по периметру корпуса 1, выводы которых соединены с входами блока управления 2, упругие стержни выполнены, например, из пружинной стали. Постоянные магниты, намагниченные таким образом, что на внешней поверхности находится, например, северный полюс магнита, а на внутренней поверхности расположен южный полюс.
Устройство трехкоординатных перемещений работает следующим образом. Постоянные магниты на упругих стержнях представляют собой механическую колебательную систему с малым трением. При этом жесткость стержней достаточна, чтобы не допустить «провисания» постоянных магнитов относительно катушек. С блока управления 2 в катушки 6, 7 поступает управляющий сигнал в виде импульса тока или напряжения. По закону электромагнитной индукции под действием ЭДС катушек 6, 7, величина которой зависит от управляющего сигнала блока управления 2, происходит отклонение подвижной горизонтальной 4 и вертикальной 5 подвижных частей, установленных с угловым смещением частей относительно катушек 6, 7. При этом величиной управляющего сигнала можно с достаточной точностью выставлять необходимую координату перемещения горизонтальной 4 и вертикальной 5 подвижных частей, что может быть использовано, например, для создания устройств движения управляемых роботов.
Итак, заявляемое изобретение позволяет расширить функциональные возможности и упростить конструкцию устройства трехкоординатных перемещений, благодаря применению в качестве электромеханического преобразователя трехкоординатного электромеханического двигателя.
Таким образом, достигается возможность бесконтактного перемещения упругих стержней под действием электрического тока и возможность точной уставки координат перемещения и положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ГРУЗОВ ПРИ ПЕРЕВОЗКАХ | 2012 |
|
RU2512699C2 |
| ГЕНЕРАТОР (ВАРИАНТЫ) | 2013 |
|
RU2548672C1 |
| АВТОНОМНОЕ ЗАРЯДНОЕ УСТРОЙСТВО | 2012 |
|
RU2525849C2 |
| ГРАВИРОВАЛЬНЫЙ СТАНОК И ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО | 2011 |
|
RU2495754C2 |
| ГЕНЕРАТОР | 2009 |
|
RU2402142C1 |
| Электрическая машина с вращательно-колебательным движением | 1982 |
|
SU1072180A1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2528793C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| МОДУЛЬ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1990 |
|
RU2030081C1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
Изобретение относится к электротехнике и робототехнике и может быть использовано как трехкоординатный двигатель различных узлов. Технический результат состоит в возможности бесконтактного перемещения упругих стержней под действием электрического тока и возможность точной уставки координат перемещения и положения. Устройство трехкоординатных перемещений содержит блок управления, корпус, электромеханический преобразователь, выполненный в виде трехкоординатного электромеханического двигателя, содержащего индукционную систему из подвижной и неподвижной частей. Подвижная часть выполнена в виде четырех двухполюсных постоянных магнитов, закрепленных на упругих стержнях и установленных с угловым смещением относительно неподвижной, состоящей из четырех катушек, размещенных по периметру корпуса. 2 ил.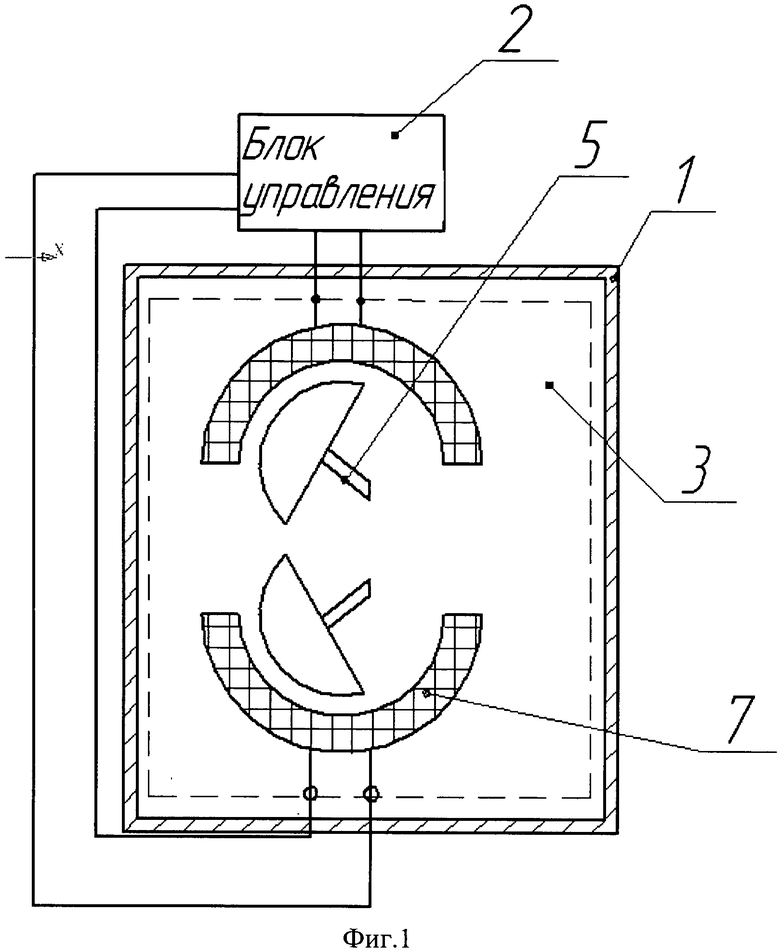
Устройство трехкоординатных перемещений, содержащее блок управления, корпус, электромеханический преобразователь, отличающееся тем, что электромеханический преобразователь выполнен в виде трехкоординатного электромеханического двигателя, содержащего индукционную систему из подвижной и неподвижной частей, при этом подвижная часть выполнена в виде четырех двухполюсных постоянных магнитов, закрепленных на упругих стержнях и установленных с угловым смещением относительно неподвижной, а неподвижная часть состоит из четырех катушек, размещенных по периметру корпуса.
| УСТРОЙСТВО ДЛЯ ТРЕХКООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2150169C1 |
| ПОЗИЦИОНЕР ТРЕХКООРДИНАТНЫЙ | 2005 |
|
RU2297078C1 |
| УСТРОЙСТВО С МАГНИТНЫМ КОНТУРОМ ДЛЯ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ (ВАРИАНТЫ) И ЕГО ПРИМЕНЕНИЕ В КАЧЕСТВЕ ДАТЧИКА ИЛИ ВОЗБУДИТЕЛЯ КОЛЕБАНИЙ | 2002 |
|
RU2273000C2 |
| ТРЕХКООРДИНАТНЫЙ МАНИПУЛЯТОР ГРАФИЧЕСКОЙ ИНФОРМАЦИИ "ЧЕРЕПАХА" НА БАЗЕ ОДНОКООРДИНАТНЫХ ДАТЧИКОВ | 1999 |
|
RU2168208C2 |
| Наглядное пособие для усвоения принципов светофорной сигнализации | 1933 |
|
SU51930A1 |
| Трехкоординатное устройство для прецизионного перемещения изделий | 1989 |
|
SU1711270A1 |
| Трехкоординатное устройство | 1985 |
|
SU1303968A1 |
| Трехкоординатный датчик перемещений | 1979 |
|
SU848984A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СВАРНЫХ ИЗДЕЛИЙ ИЗ КВАРЦЕВОГО СТЕКЛА | 1993 |
|
RU2099296C1 |
| DE 4214585 A1, 04.11.1993 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ | 0 |
|
SU390483A1 |

