Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано на локомотивах и моторвагонных подвижных составах, а также в системах интервального регулирования движения поездов.
Известна система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути, в которой сопоставление реальной координаты места нахождения поезда, полученной путем измерения пройденного пути и текущей координаты, полученной приемником спутниковой навигации, с координатой местоположения поезда на электронной карте рельсовой сети производят по сигналам от радиомаяков (бализов), установленных на пути и передающих на проходящие локомотивы координаты своего местоположения (CA 2520605, B61L 25/02, 30.03.06).
Известная система имеет относительно сложные путевые устройства и недостаточную защищенность от воздействующих факторов внешней среды, а также от вандализма. Кроме того, известная система не обеспечивает правильного функционирования в местах, где нет приема сигнала, например в тоннелях.
Путь определения позиции, не требующий внешних сигнальных устройств, заключается в измерении скорости и ее интегрировании. Скорость может быть измерена с помощью тахометров, связанных с колесами. Однако проскальзывание колес, например, во время торможения приводит к ошибкам в измерениях. Проблема интегрирования скоростей состоит в интегрировании систематических погрешностей, обусловленных нарушениями калибровки, что приводит к непрерывному возрастанию ошибки.
Известна система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути, содержащая в бортовом устройстве рельсового транспортного средства идентичные первый и второй токовихревые датчики обнаружения неоднородностей рельсового пути, блок масштабирования сигналов, блок вычисления взаимной корреляции принимаемых сигналов с образцовыми сигналами, блок идентификации элементов рельсового пути, блок памяти образцовых сигналов и координат элементов рельсового пути и блок вычисления, причем выход первого из упомянутых датчиков соединен с первым входом блока вычисления взаимной корреляции принимаемых сигналов с образцовыми сигналами, второй вход которого соединен с выходом второго из упомянутых датчиков, а выход соединен с первым входом блока масштабирования сигналов, выход которого соединен с первым входом блока идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока памяти образцовых сигналов и координат элементов рельсового пути, а выход соединен с первым входом блока вычислений, второй вход которого соединен со вторым выходом блока памяти образцовых сигналов и координат элементов рельсового пути (WO 0166401 A1, B61L 25/02, 13.09.01).
В известной системе посредством предварительного запоминания позиции и особенностей ряда топологических неоднородностей рельсового пути, образуемых такими его элементами, как стрелки, рельсовые крепления и направляющие рельсы вдоль возможных маршрутов следования, и идентификации этих элементов в процессе движения позиция определяется с высокой точностью и независимо от внешних сигнальных систем, что обеспечивает работоспособность даже при движении в тоннелях.
Высокая точность определения позиции достигается интерполяцией позиции между зафиксированными элементами пути посредством интегрирования скорости поезда. Поскольку дистанция между такими элементами, как крепления рельсов к шпалам, мала, ошибка интегрирования получается незначительной. Необходимо также обеспечивать точность подсчета количества креплений и интерполяции позиции поезда между ними. Недостатком известной системы является плохая устойчивость к сбоям и электромагнитным помехам. Например, при сбое из-за помех электропитания или грозовых разрядов может произойти сбой в подсчете количества элементов креплений. Поскольку эти элементы не различимы, существенно, друг от друга по сигналам, которые они вызывают в токовихревых датчиках, будет надолго потеряна привязка местоположения транспортного средства к правильной координате на электронной карте рельсовой сети. Восстановление правильного идентифицирования будет возможно только после прохождения транспортным средством над очередным элементом рельсового пути с выраженными индивидуальными характеристиками, таким как, например, стрелочный перевод. Эта ситуация требует немедленного снижения скорости до минимально разрешенной по всему участку и продолжения движения с малой скоростью до восстановления правильного позиционирования. Например, в случае движения поезда по перегону с бесстыковым путем, очередная стрелка может встретиться только на следующей станции, и каждый подобный сбой будет приводить к существенному снижению пропускной способности.
Наиболее близкой по технической сущности к предлагаемому изобретению является принятая в качестве прототипа система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути, содержащая, в бортовой аппаратуре управления движением каждого рельсового транспортного средства, два токовихревых датчика обнаружения неоднородностей рельсового пути, подключенных к входам блока вычисления взаимной корреляции сигналов от датчиков с образцовыми сигналами, выход которого через блок масштабирования соединен с первым входом блока идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока памяти, предназначенного для хранения образцовых сигналов и координат элементов рельсового пути, второй выход которого соединен со вторым входом вычислительного блока, первый вход которого подключен к выходу блока идентификации элементов рельсового пути, приемник идентифицирующих кодовых сигналов, соединенный через дешифратор с третьим входом вычислительного блока, выход которого соединен с блоком управления движением рельсового транспортного средства, при этом вход приемника идентифицирующих кодовых сигналов индуктивно связан с электрическими рельсовыми цепями, каждая из которых включает в себя путевой передатчик идентифицирующего кодового сигнала и блок контроля свободности и исправности рельсового пути (RU 2409492, B61L 25/04, 20.01.11).
Технический результат изобретения заключается в повышении пропускной способности, при сбоях в отдельных подсистемах определения позиции рельсового транспортного средства.
Технический результат достигается тем, что в системе для управления рельсовым транспортным средством и определения его позиции на рельсовом пути, содержащей в бортовой аппаратуре управления движением каждого рельсового транспортного средства два токовихревых датчика обнаружения неоднородностей рельсового пути, подключенных к входам блока вычисления взаимной корреляции сигналов от датчиков с образцовыми сигналами, выход которого через блок масштабирования соединен с первым входом блока идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока памяти, предназначенного для хранения образцовых сигналов и координат элементов рельсового пути, второй выход которого соединен со вторым входом вычислительного блока, первый вход которого подключен к выходу блока идентификации элементов рельсового пути, приемник идентифицирующих кодовых сигналов, соединенный через дешифратор с третьим входом вычислительного блока, выход которого соединен с блоком управления движением рельсового транспортного средства, при этом вход приемника идентифицирующих кодовых сигналов индуктивно связан с электрическими рельсовыми цепями, каждая из которых включает в себя путевой передатчик идентифицирующего кодового сигнала и блок контроля свободности и исправности рельсового пути, согласно изобретению на шпалах рельсового пути размещены группы постоянных магнитов, каждый из которых закреплен на соответствующей шпале, причем информация о последовательности расположения и расстоянии между постоянными магнитами и о координатах крайних магнитов в каждой группе, с присвоенным ей идентификационным номером, записаны в блоке памяти бортовой аппаратуры управления движением рельсового транспортного средства, которая снабжена приемными катушками, подключенными к блоку обработки сигналов, соединенному через CAN-интерфейс с четвертым входом вычислительного блока.
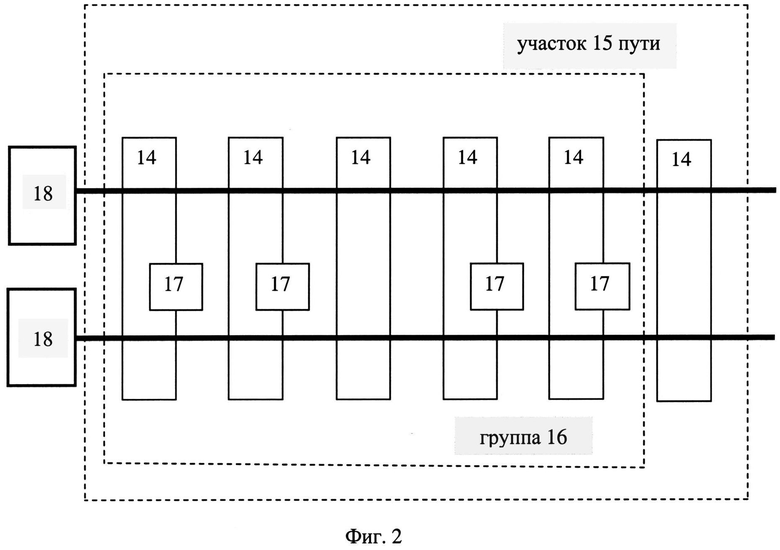
На чертеже (фиг.1) приведена схема предлагаемой системы для управления рельсовым транспортным средством и определения его позиции на рельсовом пути. На фиг.2 приведен пример расположения постоянных магнитов в группе относительно рельсов и приемных катушек рельсового транспортного средства.
Система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути содержит, в бортовой аппаратуре управления движением каждого рельсового транспортного средства, два токовихревых датчика 1 и 2 обнаружения неоднородностей рельсового пути, подключенных к входам блока 3 вычисления взаимной корреляции сигналов от датчиков с образцовыми сигналами, выход которого через блок 4 масштабирования соединен с первым входом блока 5 идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока 6 памяти, предназначенного для хранения образцовых сигналов и координат элементов рельсового пути, второй выход которого соединен со вторым входом вычислительного блока 7, первый вход которого подключен к выходу блока 5 идентификации элементов рельсового пути, приемник 8 идентифицирующих кодовых сигналов через дешифратор 9 соединен с третьим входом вычислительного блока 7, выход которого подключен к блоку 10 управления движением рельсового транспортного средства, вход приемника 8 идентифицирующих кодовых сигналов индуктивно связан с электрическими рельсовыми цепями 11, каждая из которых включает в себя путевой передатчик 12 идентифицирующего кодового сигнала и блок 13 контроля свободности и исправности рельсового пути.
На шпалах 14 участков 15 рельсового пути с известными координатами размещены группы 16 постоянных магнитов 17, расположенных вдоль одного рельса рельсового пути. Каждый постоянный магнит 17 закреплен на соответствующей шпале 14, в местах, где их магнитные поля индуцируют в приемных катушках 18 блока 19 обработки сигналов каналов индуктивной связи, проходящих над ними рельсовых транспортных средств, импульсные электромагнитные сигналы с амплитудой и длительностью, обеспечивающих требуемую достоверность распознавания этих сигналов при наличии воздействия электромагнитных сигналов других источников электромагнитных полей. Информация о последовательности расположения и расстоянии между постоянными магнитами 17 и о координатах крайних магнитов 17 в каждой группе 16, с присвоенным ей идентификационным номером, записаны в блоке 6 памяти бортовой аппаратуры управления движением рельсового транспортного средства, которая снабжена приемными катушками 18, подключенными к блоку 19 обработки сигналов, соединенному через CAN-интерфейс (не показан) с четвертым входом вычислительного блока 7.
Взаимосвязь блока 19 обработки сигналов каналов индуктивной связи с другими блоками бортовой аппаратуры рельсового транспортного средства осуществляется через CAN-интерфейс.
Система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути функционирует следующим образом.
Определение координаты местонахождения рельсового транспортного средства основано на сравнении характеристических особенностей для множества различных типов рельсовых элементов, записанных в блоке 6 памяти образцовых сигналов и координат элементов рельсового пути, с характеристическими особенностями сигналов от первого 1 и второго 2 токовихревых датчиков обнаружения неоднородностей рельсового пути. Сравнение позволяет идентифицировать тип элементов, над которыми последовательно во времени проходят датчики 1 и 2. Знание типа и порядкового номера элементов, встретившихся по пути следования рельсового транспортного средства, позволяет по электронной карте, которая хранится в блоке 6 памяти образцовых сигналов и координат элементов рельсового пути, определить позицию очередного и следующего ожидаемого элемента рельсового пути. Характеристические особенности индивидуальных рельсовых компонентов по маршруту, например, таких как стрелки, позволяют всегда их определить однозначно. Однако повторяющиеся типовые элементы (например, элементы креплений рельсов к шпалам) однозначно идентифицируются при условии отсутствия сбоев при подсчете их общего числа, определяющего порядковый номер очередного элемента.
Для устранения зависимости от скорости поезда сигналы от датчиков 1 и 2 перед сравнением масштабируются в блоке 4 масштабирования. Расстояние между поездом и последним определенным элементом рельсового пути вычисляется посредством интегрирования скорости поезда, а скорость поезда вычисляется на основе временного сдвига между сигналами датчиков 1 и 2, которые на рельсовом транспортном средстве размещены на определенном расстоянии по направлению движения. Это позволяет по сравнению с широко распространенным способом измерения скорости и пройденного пути по числу импульсов от колесного датчика исключить ошибки из-за юза и буксования и неточной калибровки диаметра бандажа. Сравнение принятых от датчиков 1 и 2 сигналов с образцовыми сигналами, хранящимися в блоке 6 памяти, производится в блоке 3 вычисления взаимной корреляции сигналов.
Высокая точность определения позиции достигается интерполяцией позиции между зафиксированными элементами пути посредством интегрирования скорости поезда. Поскольку дистанция между такими элементами, как крепления рельсов к шпалам, мала, ошибка интегрирования получается незначительной. Совпадение идентификаторов прогнозируемого конструктивного элемента с реально обнаруженным подтверждает с высокой достоверностью соответствие расчетной по карте рельсовой сети в электронной памяти и фактической позиции рельсового транспортного средства. Для исключения снижения пропускной способности при сбоях рассмотренного выше точного метода определения координаты рельсового транспортного средства параллельно производится определение координаты с помощью декодирования принятых приемником 8 идентифицирующих кодовых сигналов, поступающих из электрических рельсовых цепей 111-11n. Использование электрических рельсовых цепей приемлемо как для открытой местности, так и для горной местности или тоннелей, поскольку отсутствуют ограничения, например, связанные с условиями распространения, которые имеют место при использовании радиосигналов.
Декодирование сигналов, поступивших из электрических рельсовых цепей 111-11n, осуществляет дешифратор 9, который выделяет из принимаемого кодового сигнала наряду с информацией о расстоянии до места ограничения скорости индивидуальный номер электрической рельсовой цепи 11i участка рельсового пути, на котором в данный момент времени находится рельсовое транспортное средство. Пройденный путь от начала участка с данной рельсовой цепью с момента возникновения и на все время сбоя измеряется от колесного датчика импульсов с присущей этому методу меньшей точностью. Вычислительный блок 7 учитывает эту неточность при расчете тормозной кривой, параметры которой передаются в блок 10 управления движением рельсового транспортного средства для выработки соответствующего режима движения. Если при сбое из-за помех электропитания произойдет сбой в подсчете количества, например, элементов креплений и будет потеряна привязка местоположения транспортного средства к правильной координате на электронной карте рельсовой сети, система немедленно производит восстановление правильного идентифицирования, на основе знания идентификационного номера электрической рельсовой цепи и пути, пройденного рельсовым транспортным средством, с момента вступления на эту рельсовую цепь.
Однако выполняется это с более высокой точностью и надежностью, за счет наличия дополнительной информации, о точной координатной привязке в местах прохождения приемных катушек 18 рельсового транспортного средства над группами 16 постоянных магнитов 17. Группы 16 постоянных магнитов 17 имеют индивидуальные идентификационные признаки, закодированные в последовательности и расстоянии между постоянными магнитами 17 в каждой группе 16. Причем координаты крайних постоянных магнитов 17 в каждой группе 16 известны и записаны в блоке памяти бортового устройства управления на каждом рельсовом транспортном средстве, вовлеченном в управление системой. В результате прохождения катушки 18 рельсового транспортного средства над каждой шпалой 14, с установленным на ней постоянным магнитом 17, в катушке 18 возникает индуцированнный электрический импульс, который выделяется и обрабатывается блоком 19 обработки сигналов каналов индуктивной связи. При прохождении рельсового транспортного средства над каждой группой 16 постоянных магнитов 17, блок 19 подсчитывает общее количество принятых импульсов и временные интервалы между ними и затем, после фиксации окончания импульсной последовательности, декодирует принятую импульсную последовательность как двоичный код (логическая 1 - прием импульса при наличии магнита 17 и логический 0 - пауза при отсутствии магнита на шпале 14). В процессе декодирования определяется уникальный идентификатор (идентификационный номер) данной группы 16. Для надежности коды имеют информационную избыточность. Для компенсации зависимости параметров электрических сигналов от скорости движения рельсового транспортного средства, блоком 19 обработки сигналов каналов индуктивной связи осуществляется масштабирование принимаемых сигналов, по длительности и амплитуде в зависимости от градаций текущей скорости движения рельсового транспортного средства.
Завершение полного приема каждой последовательности импульсов, фиксируется блоком 19 обработки сигналов каналов индуктивной связи, через 2-5 метров после проследования его локомотивной катушкой 18 над последним постоянным магнитом 17 очередной группы 16. Затем блок 19 передает полученные данные в системный CAN-интерфейс для использования их в вычислительном блоке 7 вместе с данными из электронной карты рельсовой сети, о точных координатах расположения на ней очередной группы 16 постоянных магнитов 17, и с данными о текущей координате локомотива рельсового транспортного средства, принимаемыми от других подсистем определения его текущей позиции на рельсовой сети. Для достижения максимальной точности и достоверности, комплексирование всех данных осуществляется с применением оптимальной фильтрации, например, по Кальману.
Расположение постоянных магнитов 17 только с одной стороны рельсового пути приводит к появлению полезных сигналов только в одной из парных катушек 18 рельсового транспортного средства и является также дополнительным признаком направления движения. Поскольку, для снижения уровней помех приемные катушки 18 рельсовых траспортных средств на локомотивах включены встречно, использование постоянных магнитов 17 с двух сторон рельсового пути, для сокращения общей длины зоны размещения групп 16 постоянных магнитов 17 не целесообразно, так как при расположении постоянных магнитов 17 на одной и той же шпале с двух ее сторон импульсы, наводимые от них в приемных катушках 18, будут взаимно компенсироваться.
Также постоянные магниты 17, для того чтобы не взаимодействовать с токовихревой подсистемой подсчета рельсовых креплений, должны быть смещены относительно этих рельсовых креплений. Это также предохраняет сами постоянные магниты 17 от их размагничивания наводимыми высокочастотными вихревыми токами.
Повышение точности и достоверности, в определении текущей позиции поезда, при прохождении групп 16 постоянных магнитов 17 особенно проявляется в случаях, когда в других подсистемах, определяющих текущую координату локомотива рельсового транспортного средства возникают сбои или отказы в работе, особенно при высоких скоростях движения. Это позволяет более эффективно управлять движением поездов на участке, оборудованном предлагаемой системой.
Применение групп 16 постоянных магнитов 17 незначительно усложняет и удорожает путевые устройства, поскольку создаваемые группами 16 реперные метки, долговечны, конструктивно легко совместимы со шпальной решеткой и креплениями рельсов. Они не требуют электропитания и частого технического обслуживания, устойчивы к погодным и механическим воздействиям. Поскольку группы 16 постоянных магнитов 17 являются дополнительными элементами, по отношению к уже имеющимся в системе подсистемам для определения позиции поезда, ущерб от намеренного повреждения постоянных магнитов 17 вандалами не может быть значительным для системы в целом. Частота размещения на пути групп 16 постоянных магнитов 17 и их количество в каждой группе 16, выбираются исходя из соображений экономической эффективности. Например, на участках с более интенсивным и скоростным движением, экономически целесообразно устанавливать такие группы 16 чаще и, соответственно, для обеспечения надежной уникальной идентификации делать количество постоянных магнитов 17, в каждой группе 16, большим. В большинстве случаев, общее количество постоянных магнитов 17 в одной группе 16 составляет 8-12 штук. Предлагаемая система обеспечивает повышение пропускной способности, при сбоях ее отдельных подсистем в определении позиции рельсового транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2009 |
|
RU2409492C1 |
| Система для определения оптимального места остановки головного вагона электропоезда в зависимости от количества вагонов в его составе и специфики остановочного пункта | 2017 |
|
RU2653901C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518670C2 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| Адаптивный приемник сигналов автоматической локомотивной сигнализации | 2023 |
|
RU2796436C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2242392C2 |
| Способ автоматического контроля состояния рельсовых плетей бесстыкового пути и система для его реализации | 2015 |
|
RU2636200C2 |
| Устройство для магнитной обработки рельсов и рельсовых плетей | 2020 |
|
RU2749160C1 |
| Бортовое устройство для диагностики состояния рельсового пути | 2019 |
|
RU2704692C1 |
Изобретение относится к области железнодорожной автоматики, телемеханики и связи. Система содержит два токовихревых датчика обнаружения неоднородностей рельсового пути, блок вычисления взаимной корреляции сигналов, блок масштабирования, блок идентификации, блок памяти, вычислительный блок, приемник идентифицирующих кодовых сигналов, дешифратор, блок управления движением рельсового транспортного средства, передатчик идентифицирующего кодового сигнала и блок контроля свободности и исправности рельсового пути. На шпалах участков рельсового пути с известными координатами размещены группы постоянных магнитов, расположенных вдоль одного рельса рельсового пути. Каждый постоянный магнит закреплен на соответствующей шпале, в местах, где их магнитные поля индуцируют в приемных катушках блока обработки сигналов каналов индуктивной связи. Информация о последовательности расположения и расстоянии между постоянными магнитами и о координатах крайних магнитов в каждой группе, с присвоенным ей идентификационным номером, записаны в блоке памяти бортовой аппаратуры управления движением рельсового транспортного средства, которая снабжена приемными катушками. Достигается повышение пропускной способности при сбоях в отдельных подсистемах определения позиции рельсового транспортного средства. 2 ил.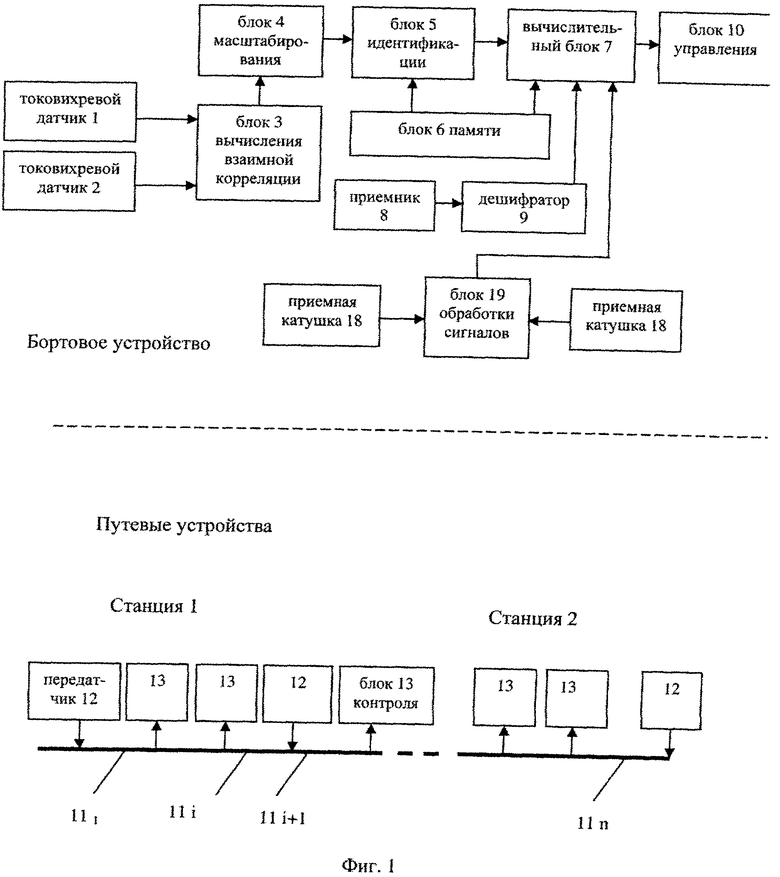
Система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути, содержащая в бортовой аппаратуре управления движением каждого рельсового транспортного средства два токовихревых датчика обнаружения неоднородностей рельсового пути, подключенных к входам блока вычисления взаимной корреляции сигналов от датчиков с образцовыми сигналами, выход которого через блок масштабирования соединен с первым входом блока идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока памяти, предназначенного для хранения образцовых сигналов и координат элементов рельсового пути, второй выход которого соединен со вторым входом вычислительного блока, первый вход которого подключен к выходу блока идентификации элементов рельсового пути, приемник идентифицирующих кодовых сигналов, соединенный через дешифратор с третьим входом вычислительного блока, выход которого соединен с блоком управления движением рельсового транспортного средства, при этом вход приемника идентифицирующих кодовых сигналов индуктивно связан с электрическими рельсовыми цепями, каждая из которых включает в себя путевой передатчик идентифицирующего кодового сигнала и блок контроля свободности и исправности рельсового пути, отличающаяся тем, что на шпалах рельсового пути размещены группы постоянных магнитов, каждый из которых закреплен на соответствующей шпале, причем информация о последовательности расположения и расстоянии между постоянными магнитами и о координатах крайних магнитов в каждой группе, с присвоенным ей идентификационным номером, записаны в блоке памяти бортовой аппаратуры управления движением рельсового транспортного средства, которая снабжена приемными катушками, подключенными к блоку обработки сигналов, соединенному через CAN-интерфейс с четвертым входом вычислительного блока.
| ЯКОРЬ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА | 0 |
|
SU166401A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВОЗДУШНЫЙ ШАР | 2012 |
|
RU2520605C2 |
| US 2010266005 A1 21.10.2010 | |||
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2009 |
|
RU2409492C1 |

