Изобретение относится к области машиностроения и может быть использовано в системах управления и защиты от перегрузок, повреждений и от опасного приближения к линии электропередач стреловых грузоподъемных кранов.
Известен способ управления стреловым грузоподъемным краном, содержащим систему безопасности, путем одновременного формирования аналоговых и дискретных сигналов, несущих информацию о режимах работы крана, а также одновременной параллельной передачи и одновременного приема этих сигналов [1, 2].
Реализующее его устройство содержит электронный блок, к которому по радиальной схеме (при помощи отдельных проводов) через кабельный барабан подключены аналоговые и дискретные датчики оголовка стрелы - датчик приближения к линии электропередач (ЛЭП) и концевой выключатель предельной высоты подъема грузозахватного органа [1].
Применение параллельного обмена информацией с помощью отдельных проводов между электронным блоком и датчиками, расположенными на оголовке стрелы, предопределяет невозможность управления нагрузками оголовка стрелы (габаритным фонарем и фарой) ввиду ограниченности числа цепей в кабельном барабане, соединяющем невыдвигаемую и выдвигаемую секции телескопической стрелы грузоподъемного крана.
Более совершенным и наиболее близким к предложенному является способ управления грузоподъемным стреловым краном, имеющим систему безопасности с датчиком приближения к ЛЭП и датчиком предельного подъема грузозахватного органа, подключенными к контроллеру, расположенному на оголовке стрелы, заключающийся в получении выходных сигналов упомянутых датчиков, преобразовании их в частотно-импульсный или широтно-импульсный сигнал и передаче этого сигнала по линии связи от контроллера, расположенного на оголовке стрелы, к другому контроллеру системы безопасности, расположенному за пределами выдвигаемой секции стрелы [3].
Устройство для осуществления этого способа, наиболее близкое к предложенному, содержит контроллер оголовка стрелы, вывод питания и линия связи которого через кабельный барабан соединены с одноименными выводами другого контроллера системы безопасности, а информационные входы контроллера оголовка стрелы подключены к антенне датчика ЛЭП и к концевому выключателю верхнего подъема грузозахватного органа [3].
Принципиальным недостатком известного технического решения является однонаправленность линии связи (мультиплексная линия связи не используется). Это исключает возможность управления габаритным фонарем, фарой и другими нагрузками оголовка стрелы и, соответственно, значительно снижает функциональные возможности системы безопасности.
Поэтому фара на оголовке стрелы, как правило, не устанавливается, а для включения габаритного фонаря применяется либо дополнительная цепь в кабельном барабане (с присущими этому техническому решению недостатками), либо габаритный фонарь включается параллельно цепи питания датчика приближения к ЛЭП (к цепи питания контроллера оголовка стрелы). В последнем случае, при необходимости включения габаритного фонаря в транспортном положении стрелы, приходится включать напряжение питания всей системы безопасности, что приводит к увеличению энергопотребления и к дополнительному расходу ресурса системы безопасности.
Задачей, на решение которой направлено предложенное техническое решение, является расширение функциональных возможностей системы за счет обеспечения возможности управления габаритным фонарем и фарой оголовка стрелы.
В предложенном способе управления грузоподъемным стреловым краном, имеющим систему безопасности с аналоговым и дискретным датчиками, в частности датчиком приближения к ЛЭП и датчиком предельного подъема грузозахватного органа, подключенными к контроллеру, расположенному на оголовке стрелы, заключающемся в получении выходных сигналов упомянутых датчиков, преобразовании их и передаче этих сигналов по линии связи от контроллера, расположенного на оголовке стрелы, к другому контроллеру системы безопасности, указанный технический результат достигается благодаря тому, что осуществляют управление габаритным фонарем или фарой путем подключения его (ее) к выходу контроллера оголовка стрелы, причем сигнал управления габаритным фонарем или фарой с органа управления, подключенного к управляющему входу соответствующего контроллера системы безопасности, по мультиплексной линии связи подают на контроллер оголовка стрелы для упомянутого управления габаритным фонарем или фарой.
В устройстве для управления грузоподъемным стреловым краном, содержащем систему безопасности, включающую в себя аналоговый и дискретный датчики, в частности датчик приближения к ЛЭП и датчик предельного подъема грузозахватного органа, установленные на оголовке стрелы, контроллер оголовка стрелы, подключенный информационными входами к упомянутым датчикам оголовка стрелы и имеющий вывод питания, и линию связи, которые соединены с выводами другого контроллера системы безопасности, эта техническая задача решается тем, что контроллер оголовка стрелы снабжается дополнительным выходом, который соединяется с габаритным фонарем или с фарой, устройство снабжается органом управления габаритным фонарем или фарой, подключенным к управляющему входу соответствующего контроллера системы безопасности, расположенного за пределами выдвигаемой секции стрелы, и кабельным барабаном для передачи напряжения питания и сигналов управления, посредством которого вывод питания и линия связи контроллера оголовка стрелы соединяются с упомянутыми выводами другого упомянутого контроллера системы безопасности крана, причем линия связи выполняется двунаправленной мультиплексной.
Во втором варианте способа управления грузоподъемным стреловым краном поставленная цель достигается тем, что габаритный фонарь подключают к контроллеру оголовка стрелы, а при выключенной системе безопасности грузоподъемного крана от органа управления габаритным фонарем осуществляют подачу на контроллер оголовка стрелы напряжения питания и с помощью этого контроллера контролируют наличие сигналов в линии связи, которую выполняют мультиплексной, причем включают габаритный фонарь при отсутствии этих сигналов. В устройстве, реализующем этот способ, поставленная техническая задача решается за счет того, что контроллер оголовка стрелы снабжается дополнительным выходом, который соединяется с габаритным фонарем, а устройство снабжается кабельным барабаном для передачи напряжения питания и сигналов управления, посредством которого вывод питания и линия связи контроллера оголовка стрелы соединяются с упомянутыми одноименными выводами другого контроллера системы безопасности, при этом линия связи выполняется мультиплексной, а напряжение на кабельный барабан подключается через схему ИЛИ, входы которой подключаются к цепи питания системы безопасности и к органу управления габаритным фонарем, причем контроллер оголовка стрелы выполняется с возможностью контроля наличия сигналов управления в мультиплексной линии связи для включения габаритного фонаря при отсутствии в ней сигналов. Схема ИЛИ при этом может быть выполнена в виде двух диодов, объединенные катоды которых подключены к кабельному барабану, анод первого диода соединен с цепью питания системы безопасности грузоподъемного крана, а анод второго диода подключен к органу управления габаритным фонарем.
Отличительные признаки предложенного технического решения, обеспечивающие возможность управления нагрузками, расположенными на оголовке стрелы (габаритным фонарем, фарой и т.д.), без увеличения числа цепей в кабельном барабане, находятся в непосредственной причинно-следственной связи с решением поставленной задачи - обеспечивают значительное расширение функциональных возможностей без усложнения кабельного барабана.
На фиг.1 и 2 приведены функциональные схемы устройств, реализующих предложенные варианты способа управления краном.
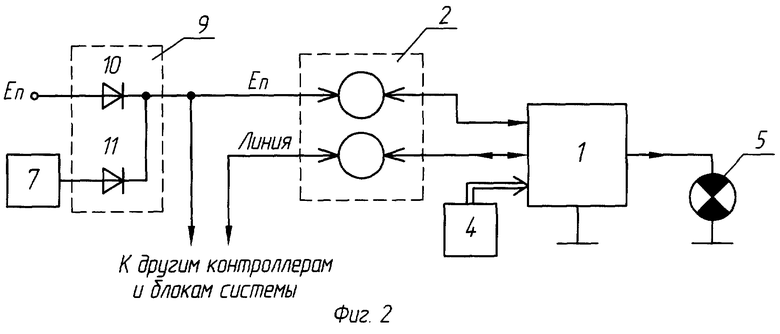
Устройство, приведенное на фиг.1, в котором осуществляется управление габаритным фонарем и (или) фарой по мультиплексной линии связи, содержит контроллер (блок, датчик) оголовка стрелы 1, вывод питания и двунаправленный вход/выход мультиплексной линии, связи которого через кабельный барабан 2 соединены с одноименными выводами других контроллеров 3 системы безопасности, а информационные входы контроллера оголовка стрелы 1 подключены к аналоговым и дискретным датчикам 4 оголовка стрелы, в частности к датчику приближения к линии электропередачи (ЛЭП) и к датчику предельного подъема грузозахватного органа. Контроллер оголовка стрелы 1 снабжен дополнительными выходами, которые соединены с габаритным фонарем 5 и (или) с фарой 6 оголовка стрелы, а органы управления габаритным фонарем 7 и (или) фарой 8 оголовка стрелы подключены к управляющим входам контроллера 3, расположенного за пределами выдвигаемой секции стрелы.
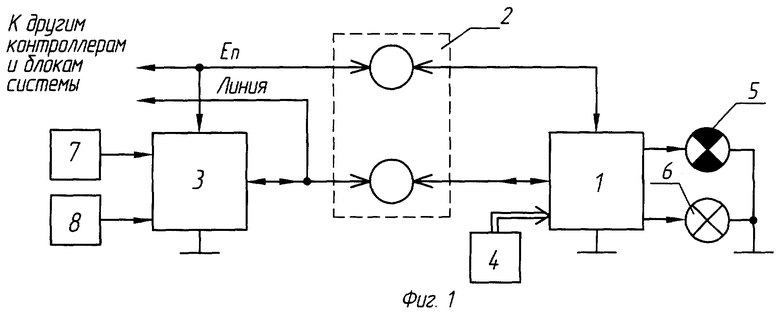
Устройство, приведенное на фиг.2, в котором осуществляется управление габаритным фонарем 5 при выключенном питании системы безопасности, содержит контроллер оголовка стрелы 1, вывод питания и двунаправленный вход/выход мультиплексной линии, связи которого через кабельный барабан 2 соединены с одноименными выводами других контроллеров системы безопасности (на фиг.2 условно не показаны). Информационные входы контроллера оголовка стрелы 1 подключены к аналоговым и дискретным датчикам 4 оголовка стрелы. Напряжение питания Еп на кабельный барабан 2 подается через схему ИЛИ 9, входы которой подключены к цепи питания системы безопасности Еп и к органу управления габаритным фонарем 7, причем контроллер оголовка стрелы 1 выполняется с возможностью контроля наличия сигналов управления в мультиплексной линии связи, а его выход соединяется с габаритным фонарем 5.
Схема ИЛИ может быть выполнена в виде диодов 10, 11, объединенные катоды которых подключены к кабельному барабану 2, а аноды подключены соответственно к цепи питания системы безопасности грузоподъемного крана и к органу управления габаритным фонарем 7.
Контроллеры системы безопасности могут быть выполнены на микроконтроллерах, имеющих встроенный аналого-цифровой преобразователь, который используется для подключения аналоговых датчиков.
В системе безопасности устанавливаются, как правило, контроллеры (модули-датчики) длины стрелы и угла азимута, выполненные, например, на основе потенциометров, подключенных к входам аналого-цифровых преобразователей соответствующих микроконтроллеров. Контроллер угла наклона стрелы может быть выполнен на основе акселерометра, а контроллеры-датчики усилия или давления - в виде тензометрических датчиков.
Для формирования и приема последовательных цифровых сигналов в мультиплексной линии связи в контроллерах могут использоваться специализированные микросхемы приемопередатчиков LIN, CAN, J1850, ISО9141, RS-232C или любого другого интерфейса.
Все контроллеры системы безопасности объединены через общую мультиплексную линию связи, а модули, расположенные на выдвигаемой и невыдвигаемой секциях стрелы, - через кабельный барабан 2.
Поясним суть предложенных способов на примере работы реализующих их устройств.
Контроллеры, в том числе контроллеры 1 и 3, осуществляют измерение рабочих параметров грузоподъемного крана и контроль положения его грузоподъемного (стрелового) оборудования. Контроллер 1, установленный на оголовке стрелы, при помощи датчиков 4 осуществляет контроль напряженности электрического поля ЛЭП и предельную высоту подъема крюка.
Один из контроллеров (центральный блок) системы безопасности (на фиг.1 и 2 условно не показан) снабжается органами управления и элементами индикации и выполняет роль ведущего устройства. Органы управления и элементы индикации могут быть также выполнены в виде отдельных устройств, подключенных к входам/выходам контроллеров.
Центральный блок работает по записанной в памяти его микроконтроллера программе и в последовательном коде по мультиплексной линии связи с использованием любого известного последовательного протокола осуществляет обмен информацией с контроллерами, в том числе с контроллером оголовка стрелы 1.
После получения информации от контроллеров-датчиков центральный блок определяет текущую нагрузку крана, положение его грузоподъемного (стрелового) оборудования и степень приближения оголовка стрелы к ЛЭП. Допустимые режимы нагружения в виде грузовых характеристик крана хранятся в памяти центрального блока. Зона допустимых значений положения грузоподъемного (стрелового) оборудования крана вводится при задании параметров координатной защиты при помощи органов управления, расположенных на центральном блоке, и сохраняется в его памяти. В памяти этого блока хранятся также предельно допустимые уровни напряженности электрического поля, контролируемые датчиком приближения оголовка стрелы к ЛЭП.
Центральный блок осуществляет сравнение фактического нагружения крана с предельно допустимым, сравнение фактического положения грузоподъемного оборудования с зоной допустимых положений, а также сравнение фактической напряженности поля ЛЭП с предельно допустимой и, в зависимости от результатов этих сравнений, по общей мультиплексной линии связи передает в контроллер исполнительных устройств (на фиг.1 и 2 условно не показан) сигналы блокировки включения исполнительных механизмов крана, осуществляя его автоматическую защиту от перегрузки по грузовому моменту, координатную защиту, а также защиту от опасного приближения к ЛЭП.
Сигналы управления габаритным фонарем 5 и фарой 6 с органов управления габаритным фонарем 7 и фарой 8, подключенных к входам контроллера 3 (см. фиг.1), непосредственно от контроллера 3 или через центральный блок по мультиплексной линии связи через кабельный барабан 2 подаются на контроллер оголовка стрелы 1, реализуя управление габаритным фонарем 5 и фарой оголовка стрелы 6.
Для исключения необходимости поддержания системы безопасности во включенном состоянии при включении габаритного фонаря в устройстве, приведенном на фиг.2, при выключенном напряжении питания всей системы безопасности Еп напряжение питания на контроллер оголовка стрелы подается от органа управления габаритным фонарем 7 через диод 11 схемы ИЛИ 9. Диод 10 при этом предотвращает поступление напряжения в общую цепь питания системы безопасности, которая остается в выключенном состоянии. При отключении напряжения питания всех контроллеров (кроме контроллера оголовка стрелы 1) сигналы в мультиплексной линии связи отсутствуют, что является сигналом для контроллера оголовка стрелы 1, свидетельствующим о необходимости автоматического включения габаритного фонаря 5.
Для реализации этой функции контроллер оголовка стрелы 1, работая по заложенной в памяти его микроконтроллера программе, периодически опрашивает мультиплексную линию связи и при отсутствии на ней сигналов автоматически включает габаритный фонарь 5. Благодаря этому осуществляется включение габаритного фонаря 5 при выключенной системе безопасности. При этом возможно также и отключение напряжения питания контроллера оголовка стрелы 1. В этом случае выходная цепь контроллера оголовка стрелы 1, связанная с габаритным фонарем 5, выполняется в виде реле с нормально замкнутыми контактами, включенными между выводом питания контроллера оголовка стрелы 1 и габаритным фонарем 5, а отсутствие сигналов в мультиплексной линии связи используется для отключения напряжения питания контроллера 1. При этом, в случае нормальной работы системы безопасности и отсутствии сигнала управления габаритным фонарем 5, контроллер 1 подает напряжение питания на обмотку реле, обеспечивая выключение габаритного фонаря 5.
В итоге, в предложенном техническом решении обеспечивается не только эффективная реализация всех функциональных характеристик системы безопасности грузоподъемного крана, но и обеспечивается расширение ее функциональных возможностей за счет реализации управления нагрузками оголовка стрелы без увеличения числа цепей в кабельном барабане.
Источники информации
1. Новые нормативные документы по безопасной эксплуатации подъемных сооружений: Вып.2 // Сост. B.C. Котельников, Н.А. Шишков, А.М. Горлин. - М.: ПИО ОБТ, 1999. - С.47-86.
2. Свидетельство на полезную модель RU 7097 U1, МПК6 В 66 С 23/90. Ограничитель нагрузки стрелового крана, 16.07.1998.
3. RU 2104245 С1, МПК6 В 66 С 23/88, 10.02.1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2276094C2 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| СИСТЕМА БЕЗОПАСНОСТИ КРАНА СТРЕЛОВОГО ТИПА | 2006 |
|
RU2314248C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2011 |
|
RU2487078C2 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ | 2006 |
|
RU2314992C2 |
| СПОСОБ ПИТАНИЯ ИЗМЕРИТЕЛЬНО-УПРАВЛЯЮЩЕЙ СОСТАВНОЙ ЧАСТИ СИСТЕМЫ ЗАЩИТЫ И УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА, РАЗМЕЩЕННОЙ НА ЕГО СТРЕЛЕ ИЛИ НА ПОЛИСПАСТЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2317247C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2005 |
|
RU2305063C2 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232709C2 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
Изобретение относится к области машиностроения и может быть использовано в системах управления и защиты от перегрузок, повреждения и опасного приближения к ЛЭП стреловых грузоподъемных кранов. Согласно первому варианту способа осуществляют управление габаритным фонарем или фарой крана путем подключения их к выходам контроллера оголовка стрелы, причем сигналы управления габаритным фонарем и фарой с органов управления, подключенных к управляющим входам соответствующего контроллера системы безопасности, по мультиплексной линии связи подают на контроллер оголовка стрелы. В устройстве для осуществления этого варианта способа контроллер оголовка стрелы снабжен дополнительным выходом для соединения с габаритным фонарем или фарой оголовка стрелы, устройство снабжено органом управления габаритным фонарем или фарой оголовка стрелы, подключенным к управляющему входу упомянутого другого контроллера системы безопасности, расположенного за пределами выдвигаемой секции стрелы, и двухпроводным кабельным барабаном для передачи напряжения питания и сигналов управления и посредством которого вывод питания и линия связи контроллера оголовка стрелы соединены с упомянутыми выводами другого упомянутого контроллера системы безопасности крана. Согласно второму варианту способа осуществляют управление габаритным фонарем путем подключения его к контроллеру оголовка стрелы. При выключенной системе безопасности осуществляют подачу на этот контроллер напряжения питания и контролируют с помощью этого контроллера наличие сигналов в линии связи, при этом фонарь включают при отсутствии этих сигналов. В устройстве для осуществления этого варианта способа контроллер оголовка стрелы снабжен дополнительным выходом, который соединен с габаритным фонарем, устройство снабжено двухпроводным кабельным барабаном для передачи напряжения питания и сигналов управления, посредством которого вывод питания и линия связи контроллера оголовка стрелы соединены с упомянутыми одноименными выводами других контроллеров системы безопасности крана. Напряжение на кабельный барабан подключено через схему ИЛИ, входы которой подключены к цепи питания системы безопасности и к органу управления габаритным фонарем, причем контроллер оголовка стрелы выполнен с возможностью контроля наличия сигналов управления в линии связи для включения габаритного фонаря при отсутствии в ней сигналов. Линия связи в указанных вариантах выполнена мультиплексной. Изобретение позволяет расширить функциональные возможности системы за счет обеспечения управления габаритным фонарем или фарой. 4 с. и 1 з.п. ф-лы, 2 ил.
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПОДЪЕМНОГО КРАНА ОТ ОПАСНОГО НАПРЯЖЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 1997 |
|
RU2104245C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОДЪЕМА КРЮКА СТРЕЛОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2096307C1 |
| US 5730305 А, 24.03.1998 | |||
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2124447C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2151732C1 |

