Изобретение относится к области измерения скорости наземных подвижных объектов и может быть использовано, в частности в наземной навигации и топопривязке для измерения скорости и пройденного расстояния.
Известно устройство для измерения скорости наземного подвижного объекта (прототип), содержащее доплеровский датчик скорости, состоящий из последовательно соединенных приемопередатчика, перестраиваемого фильтра доплеровских частот и измерителя частоты; механический датчик скорости, переключатель, информационные входы которого соединены с выходами датчиков, схему сравнения кодов, выход которой соединен с управляющим входом переключателя, преобразователь частота-код, вход которого соединен с выходом переключателя, а выход соединен с управляющим входом фильтра и входом схемы сравнения кодов, на втором входе которой задано постоянное число [1].
При этом в данном устройстве схема сравнения кодов совместно с преобразователем частота-код выполняет функцию частотного компаратора, вырабатывающего при заданной частоте сигнал для переключения выходов датчиков.
Измеритель частоты доплеровского датчика в рабочем диапазоне доплеровских частот выполняет функцию формирования сигнала с частотой, равной частоте перехода через нулевой уровень доплеровского сигнала, и с уровнем, пригодным для работы последующих блоков.
Недостатками данного устройства являются:
- увеличение погрешности измерения скорости при уменьшении или полном пропадании доплеровского сигнала на выходе фильтра при попадании в зону излучения доплеровского датчика выбросов из под движителей объекта в виде воды, грунта и т.п., а также обгоняемых или обгоняющих объектов, когда доплеровский сдвиг частоты значительно отличается от доплеровской частоты, соответствующей скорости движения объекта относительно поверхности движения;
- увеличение погрешности из-за пропадания доплеровского сигнала при наличии на поверхности движения участков с зеркальным отражением излучаемого датчиком сигнала, например, луж, которое также наиболее характерно для наземных подвижных объектов из-за относительно малой высоты размещения доплеровского датчика и, соответственно, малой площади облучаемого участка поверхности;- необходимость расширения рабочей полосы частот фильтра на величину возможных отклонений частоты механического датчика от значений, соответствующих истинной скорости объекта, вызванных, например, изменением давления в шинах колес, пробуксовкой и проскальзыванием движителей объекта, неравномерностью вращения вала механического датчика, обусловленной приводом для связи датчика с ходовой частью объекта. Изобретение направлено на уменьшение погрешности измерения скорости в сложных дорожных условиях (при наличии выбросов в зону излучения доплеровского датчика из под движителей объекта, обгонов, при пропаданиях сигнала от гладких поверхностей, при пробуксовках и проскальзываниях) и при наличии различного вида внутренних помех в доплеровском датчике за счет:
- использования для измерения скорости значений периодов сигнала с выхода измерителя частоты доплеровского датчика, которые не выходят за верхнюю и нижнюю границы, задаваемые относительно усредненного значения предыдущих периодов сигнала доплеровского датчика скорости, уложившихся в заданные границы;
- введения режима измерения скорости по запомненным предыдущим значениям периода доплеровского сигнала на время относительно кратковременных отклонений измеряемых периодов за заданные границы, например, при попадании в зону излучения выбросов из-под движителей объекта, обгоняемых и встречных малопротяженных объектов, при пропаданиях сигнала от луж;
- использования для измерения скорости менее точного механического датчика скорости только в тех случаях, когда снимается разрешение для измерения скорости по запомненному значению периода доплеровского сигнала, например, при обгонах протяженных объектов, длительных пропаданиях доплеровского сигнала.
Это достигается тем, что в устройство измерения скорости, содержащее доплеровский датчик скорости, состоящий из последовательно соединенных приемопередатчика и измерителя частоты, механический датчик скорости, преобразователь частота-код, частотный компаратор, переключатель режимов, при этом первый вход переключателя режимов соединен с выходом измерителя частоты, второй вход с выходом механического датчика скорости, управляющий вход с выходом частотного компаратора, введены блок сравнения периодов, дополнительный переключатель режимов, последовательно соединенные блок запоминания кода и преобразователь код-частота, блок ограничения работы по памяти, блок усреднения периодов, при этом вход преобразователя частота-код соединен с выходом измерителя частоты, а выход преобразователя частота-код с информационным входом блока запоминания кода, вход частотного компаратора соединен с выходом механического датчика скорости, выход переключателя режимов с первым входом дополнительного переключателя режимов, выход преобразователя код-частота соединен с вторым входом дополнительного переключателя режимов, выход блока сравнения периодов с управляющим входом блока запоминания кодов и с первьм входом блока ограничения работы по памяти, выход блока ограничения работы по памяти соединен с управляющим входом дополнительного переключателя режимов, первый вход блока сравнения периодов соединен с выходом измерителя частоты, а второй вход с выходом блока усреднения, выход дополнительного переключателя режимов соединен с входом блока усреднения периодов и с вторым входом блока ограничения режима работы по памяти и является выходом устройства.
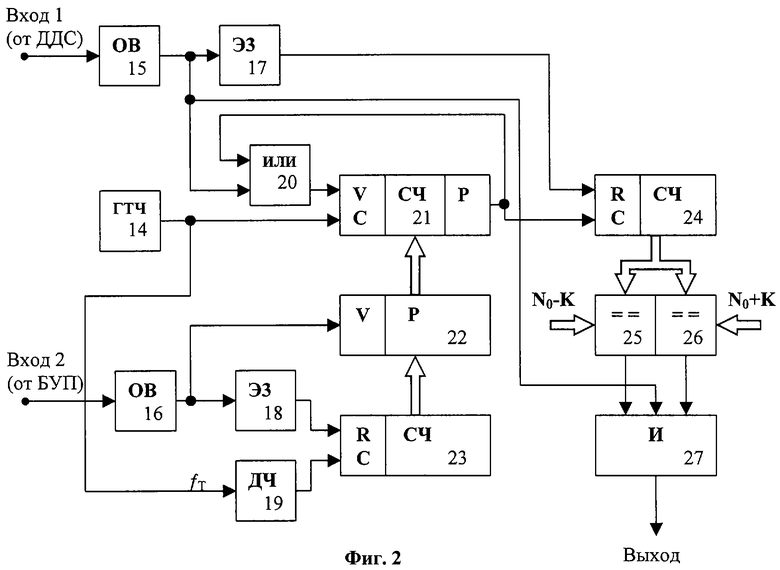
На фиг.1 приведена структурная схема устройства, на фиг.2 вариант реализации блока сравнения периодов, на фиг.3 вариант реализации блоков, осуществляющих преобразование частота-код, запоминание кода и преобразование код-частота, на фиг.4 - вариант реализации блока ограничения работы по памяти.
Устройство измерения скорости (фиг.1) содержит доплеровский датчик скорости (ДДС) 1, состоящий из последовательно соединенных приемопередатчика (ПП) 2 и измерителя частоты (ИЧ) 3, механический датчик скорости (МДС) 4, переключатель режимов 5, частотный компаратор (ЧК) 6, преобразователь частота-код (ПЧК) 7, блок сравнения периодов (БСП) 8, блок усреднения периодов (БУП) 9, дополнительный переключатель режимов 10, блок запоминания кода (БЗК) 11, блок ограничения работы по памяти (БОРП) 12, преобразователь код-частота (ПКЧ) 13. При этом выход ДДС 1 соединен с первым входом переключателя режимов 5, с входом ПКЧ 7 и с первым входом БСП 8, выход МДС 4 соединен с вторым входом переключателя режимов 5 и с входом ЧК 6, выход ЧК 6 соединен с управляющим входом переключателя режимов 5, выход которого соединен с первым входом дополнительного переключателя режимов 10, выход ПЧК 7 соединен с информационным входом БЗК 11, выход БЗК 11 соединен с входом ПКЧ 13, выход которого соединен с вторым входом дополнительного переключателя режимов 10, второй вход БСП 8 соединен с выходом БУП 9, выход БСП 8 соединен с управляющим входом БЗК 11 и с первым входом БОРП 12, выход БОРП 12 соединен с управляющим входом дополнительного переключателя режимов 10, выход которого соединен с входом БУП 9, вторым входом БОРП 12 и является выходом устройства.
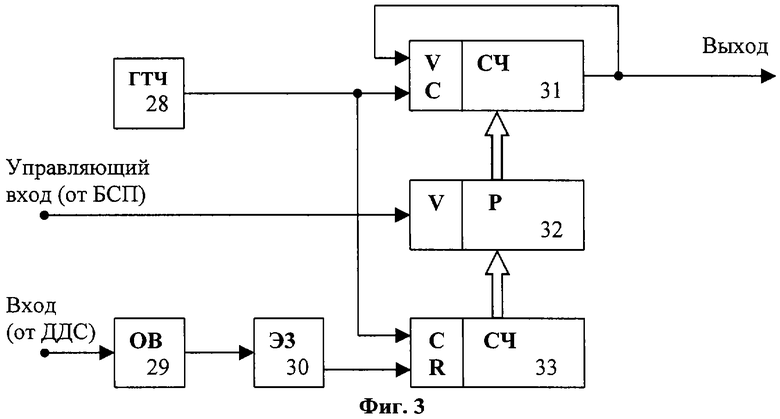
Блок сравнения периодов (фиг.2) содержит генератор тактовой частоты (ГТЧ) 14, одновибраторы (ОВ) 15, 16, входы которых являются входами блока, элементы задержки (ЭЗ) 17, 18, делитель частоты (ДЧ) 19 в виде счетчика, элемент ИЛИ 20, вычитающий счетчик 21, регистр (Р) 22, суммирующие счетчики 23, 24, схемы сравнения кодов 25, 26 и схему И 27. При этом выход ГТЧ 14 соединен с входом ДЧ 19 и с счетным входом вычитающего счетчика 21, выход OВ 15 соединен с входом ЭЗ 17, с первым входом элемента ИЛИ 20 и с первым входом схемы И 27, выход OВ 16 соединен с входом ЭЗ 18 и с входом разрешения записи Р 22, счетный вход суммирующего счетчика 23 соединен с выходом ДЧ 19, а вход обнуления с выходом ЭЗ 18, параллельные выходы суммирующего счетчика 23 соединены с параллельными входами Р 22, параллельные выходы Р 22 с параллельными входами вычитающего счетчика 21, у которого последовательный выход соединен с вторым входом элемента ИЛИ 20 и с счетным входом суммирующего счетчика 24, а вход разрешения записи по параллельным входам - с выходом элемента ИЛИ 20, выход ЭЗ 17 соединен с входом обнуления суммирующего счетчика 24, у которого параллельные выходы соединены с первыми входами схем сравнения кодов 25, 26, на вторые входы которых подаются коды, определяющие нижнюю и верхнюю границы, соответственно, допустимого отклонения сравниваемых периодов, выходы схем сравнения кодов 25, 26 соединены с вторым и третьим входом схемы И 27, выход которой является выходом блока сравнения периодов.
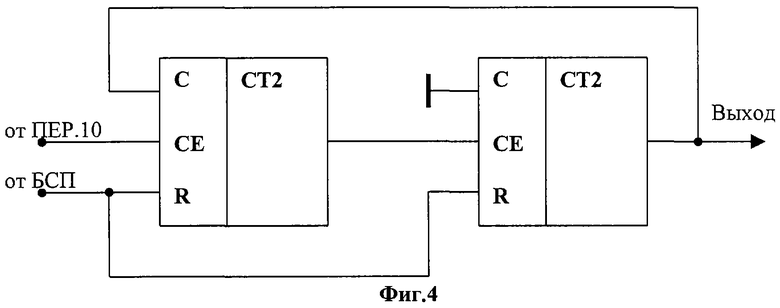
Преобразователь частота-код содержит (фиг.3) последовательно соединенные одно вибратор 29, элемент задержки 30, счетчик 33, на счетный вход которого подаются импульсы с генератора тактовой частоты 28, блок запоминания кода выполнен на регистре 32, преобразователь код-частота содержит вычитающий счетчик с перезаписью информации с параллельных входов 31, на счетный вход которого подаются импульсы с генератора тактовой частоты 28.
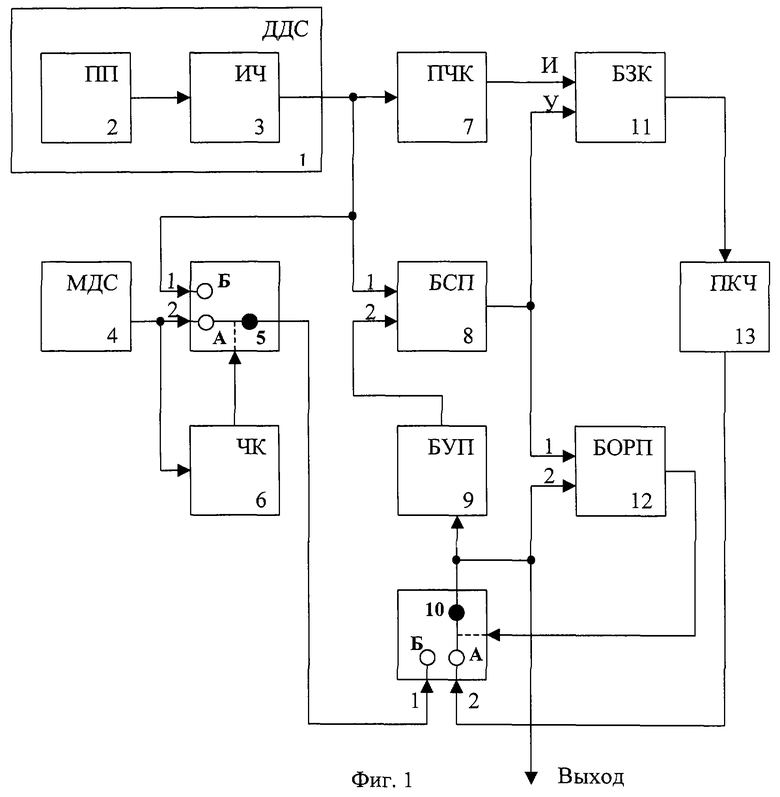
В варианте реализации блока ограничения работы на памяти (фиг.4) использованы последовательно соединенные счетчики, первый из которых имеет вход блокировки счета по сигналу с последнего счетчика.
Устройство измерения скорости работает следующим образом. При движении объекта приемопередатчик 2 ДДС 1 (фиг.1) формирует в направлении подстилающей поверхности зондирующий сигнал, принимает отраженный сигнал и выделяет доплеровский сдвиг частоты в отраженном сигнале. В измерителе частоты 3 осуществляется усиление доплеровского сигнала, фильтрация от помех, частота которых выше и ниже рабочего диапазона доплеровских частот, и преобразование в импульсный сигнал, частота которого будет пропорциональна скорости объекта относительно отражающей поверхности. МДС 4, являющийся преобразователем числа оборотов вала в пропорциональное количество импульсов на выходе и имеющий кинематическую связь вала с ходовой частью объекта, также вырабатывает на выходе сигнал, частота которого пропорциональна скорости движения.
В начале движения, при наличии сигнала на выходе МДС 4, частотный компаратор 6, при превышении частотой сигнала МДС 4 порогового значения, заданного на другом входе ЧК 6, устанавливает переключатель режимов 5 в положение А.
БСП 8 сравнивает значение каждого периода сигнала с выхода ИЧ 3, на любой частоте рабочего диапазона ДДС 1, с усредненным в БУП 9 значением периода сигнала с выхода переключателя режимов 10.
Если значение периода сигнала с выхода ИЧ 3 не выходит за верхнюю и нижнюю границы, задаваемые БСП 8 относительно усредненного значения периода сигнала на выходе дополнительного переключателя режимов 10, то БСП 8 вырабатывает сигнал, разрешающий перезапись с ПЧК 7 в БЗК 11 значения проанализированного периода. При этом ПКЧ 13 начинает вырабатывать сигнал с частотой, равной частоте сигнала на выходе ИЧ 3. В то же время, при первом сигнале разрешения перезаписи на выходе БСП 8, БОРП 12 вырабатывает сигнал, всегда устанавливающий дополнительный переключатель режимов 10 в положение А, чем обеспечивается сравнение периодов сигнала ИЧ 3 с усредненным значением периодов сигнала с выхода ПКЧ 13.
Если на выходе БСП 8 отсутствуют импульсы разрешения перезаписи, БОРП 12 через определенный промежуток времени, определяемый с помощью сигнала, поступающего на БОРП 12 с выхода дополнительного переключателя режимов 10, переводит последний в положение Б. Тем самым обеспечивается сравнение каждого периода сигнала на выходе ИЧ 3 с усредненным значением сигнала МДС 4 или, в зависимости от положения переключателя режимов 5, с усредненным значением периодов сигнала с выхода ИЧ 3.
При движении объекта, когда частоты сигналов на выходах ИЧ 3 и МДС 4 равны, что имеет место при отсутствии посторонних движущихся предметов в зоне излучения ДДС 1 и сигналов на его выходе от других помех, а также при отсутствии юза, пробуксовок объекта, то дополнительный переключатель режимов 10, независимо от его начального положения, устанавливается БОРП 12 в положение А.
Например, если первоначально дополнительный переключатель режимов 10 находился в положении А, и частота сигнала на выходе ПКЧ 13 отличалась от частоты сигнала на выходе ИЧ 3 настолько, что импульсы разрешения перезаписи на выходе БСП 8 отсутствовали, то БОРП 12 переведет дополнительный переключатель 10 в положение Б. Поскольку в этом случае на БСП 8 будут поступать усредненные периоды сигнала МДС 4, равные периодам сигнала ИЧ 3, то БСП 8 выработает сигнал на разрешение перезаписи. В результате чего на выходе ПКЧ 13 будет вырабатываться сигнал с частотой, равной частоте сигнала на выходе ИЧ 3, а БОРП 12 установит дополнительный переключатель 10 в положение А.
После этого границы, в пределах которых разрешается прохождение на выход устройства периодов сигнала с ИЧ 3, определяются по усредненным периодам сигнала с ПКЧ 13. При этом формируемые БСП 8 границы не зависят от отклонений частоты МДС 4, обусловленных проскальзыванием, пробуксовкой и другими причинами.
При попадании в зону излучения ДДС 1 мало протяженных встречных или обгоняемых объектов, выбросов грунта, воды или при кратковременных пропаданиях сигнала ДДС 1, а также в случае высокочастотных помеховых импульсов на выходе ИЧ 3, т.е. когда периоды сигнала на выходе ИЧ 3 не укладываются в заданные границы в течение интервала времени, не превышающего заданного БОРП 12, то в течение времени воздействия данных помех на выход устройства поступает сигнал с предыдущим значением частоты ДДС 1.
Из-за возможного изменения скорости объекта в течение относительно длительной работы устройства по памяти, погрешность измерения скорости может быть значительной, например, при обгонах протяженных объектов или в случае длительных пропаданий сигнала при проезде луж, мостов и т.п. Поэтому, по истечении заданного времени работы по памяти, в течение которого погрешность из-за изменения скорости объекта находится в допустимых пределах, БОРП 12 переводит дополнительный переключатель режимов 10 в положение Б.
В этом случае на выход устройства и для формирования границ диапазона селекции периодов поступает сигнал с МДС 4.
С учетом того, что для формирования границ в данном случае используются периоды сигнала МДС 4, усредненные в БУП 9, устраняется влияние неравномерности вращения вала МДС 4 на формирование границ селекции периодов.
После окончания, например, обгона периоды сигналов на выходе ИЧ 3 и МДС 4 выравниваются. На выходе БСП 8 вырабатываются импульсы перезаписи кода в БЗК 11, после чего БОРП 12 переводит дополнительный переключатель режимов 10 в положение А. На выход устройства начинает поступать сигнал с ДДС 1, периоды которого уложились в границы, определенные относительно усредненного значения предыдущих периодов сигнала с ДДС 1.
При юзе объекта, когда частота сигнала на выходе МДС 4 будет близкой к нулевой, частотный компаратор 6 переводит переключатель режимов 5 в положение Б. В случае больших ускорений, когда период сигнала на выходе ИЧ 3 может увеличиваться быстрее смещения границ, формируемых БСП 8 с задержкой на усреднение в БУП 9, возможен перевод дополнительного переключателя режимов 10 в положение Б. В этом режиме на выход устройства и для формирования границ будет поступать сигнал с выхода блока ИЧ 3. После чего и при отсутствии сигнала МДС 4 обеспечивается переход устройства в основной режим работы, когда помехоустойчивость устройства как к внутренним так и внешним помехам работе ДДС 1 повышается за счет формирования границ селекции по усредненному значению прошедших заданные границы периодов и за счет работы устройства по запомненному значению предыдущего периода, при помехах, длительность которых не превышает заданный БОРП 12 интервал времени.
Вариант реализации блока сравнения периодов, функциональная схема которого приведена на фиг.2, работает следующим образом. Сигналы, периоды которых сравниваются, в виде прямоугольных импульсов подаются на одно вибраторы 15, 16, формирующие на выходе, по одному из фронтов входного сигнала, импульсы, длительность которых намного меньше длительности сравниваемых периодов. При использовании в качестве БУП счетчика с коэффициентом деления N и при наличии на его входе сигнала с периодом Т0 на вход 2 блока сравнения периодов поступает сигнал, период которого равен NT0. В течение данного периода в счетчик 23 с делителя частоты 19, имеющего коэффициент деления N· No, поступают импульсы с частотой  , где N0 - число, относительно которого задается величина допуска на отклонение сравниваемых периодов, fт - частота генератора тактовой частоты 14, намного превышающая частоту сигналов на входах 1 и 2. Число импульсов n2, накопленное в счетчике 23 за период то сигнала NT0, будет равно
, где N0 - число, относительно которого задается величина допуска на отклонение сравниваемых периодов, fт - частота генератора тактовой частоты 14, намного превышающая частоту сигналов на входах 1 и 2. Число импульсов n2, накопленное в счетчике 23 за период то сигнала NT0, будет равно  . Импульсом с одновибратора 16 в конце каждого периода это число переписывается в регистр 22, затем этим же импульсом, после задержки на время перезаписи в элементе задержки 18, счетчик 23 обнуляется, и начинается очередное заполнение счетчика 23 до момента окончания следующего периода сигнала на входе 2. Импульсом с одновибратора 15 через схему ИЛИ 20 число, запомненное в регистре 22, в параллельном коде переписывается в счетчик 21, работающий в режиме вычитания. Время вычитания числа n2 будет равно
. Импульсом с одновибратора 16 в конце каждого периода это число переписывается в регистр 22, затем этим же импульсом, после задержки на время перезаписи в элементе задержки 18, счетчик 23 обнуляется, и начинается очередное заполнение счетчика 23 до момента окончания следующего периода сигнала на входе 2. Импульсом с одновибратора 15 через схему ИЛИ 20 число, запомненное в регистре 22, в параллельном коде переписывается в счетчик 21, работающий в режиме вычитания. Время вычитания числа n2 будет равно  . После каждого вычитания числа n2 счетчик 21 вырабатывает сигнал, поступающий на счетчик 24 для счета и на схему ИЛИ 20 для следующей перезаписи числа из регистра 22 в счетчик 21. За период Т1 сигнала на входе 1 счетчиком 24 будет накоплено количество импульсов
. После каждого вычитания числа n2 счетчик 21 вырабатывает сигнал, поступающий на счетчик 24 для счета и на схему ИЛИ 20 для следующей перезаписи числа из регистра 22 в счетчик 21. За период Т1 сигнала на входе 1 счетчиком 24 будет накоплено количество импульсов  , которое в параллельном коде подается на схемы сравнения кодов 25, 26.
, которое в параллельном коде подается на схемы сравнения кодов 25, 26.
Схема сравнения кодов 25 вырабатывает на схему И 27 сигнал логической "1" при условии n1≥N0-К, где К - число, задающее величину допуска на отклонение сравниваемых периодов. Схема сравнения кодов 26 вырабатывает сигнал логической "1" при условии n1≤N0+К. Значения N0-К и N0+К заданы в виде двоичного кода на вторых входах схем сравнения кодов 25, 26.
Таким образом при выполнении условия N0+К≤ n1≤N0+К или  , на выход схемы И 27 будут проходить импульсы с одновибратора 15, период следования которых равен периоду сигнала на входе 1, и импульсы на выходе схемы И 27 будут отсутствовать при невыполнении данного условия. Например, при N0=8, K=1 импульсный сигнал на выходе схемы И 27 будет присутствовать при условии
, на выход схемы И 27 будут проходить импульсы с одновибратора 15, период следования которых равен периоду сигнала на входе 1, и импульсы на выходе схемы И 27 будут отсутствовать при невыполнении данного условия. Например, при N0=8, K=1 импульсный сигнал на выходе схемы И 27 будет присутствовать при условии  .
.
Вариант реализации блоков ПКЧ 7, БЗК 11 и ПКЧ 13 (фиг.1), приведенный на фиг.3, работает следующим образом.
По сигналу с ДДС, одновременно поступающего на вход 1 блока сравнения периодов (фиг.2), одновибратором 29 (фиг.3), входящим совместно с элементом задержки 30 и счетчиком 33 в состав преобразователя частота-код, формируются короткие импульсы, каждый из которых после прохождения через элемент задержки 30, обнуляет накапливающий счетчик 33. Затем, в течение периода Т1 входного сигнала, счетчик заполняется импульсами с генератора тактовой частоты 28. Накопленное в счетчике 33 число импульсов n=ftT1 в конце периода переписывается сигналом с выхода блока сравнения периодов в регистр 32, являющийся реализацией блока запоминания кода.
После перезаписи числа из счетчика 33 в регистр 32 счетчик обнуляется и начинается его заполнение в течение следующего периода.
Счетчик 31, работающий в режиме вычитания и на котором реализован преобразователь код-частота, после вычитания записанного в него числа формирует на выходе сигнал, по которому в него вновь записывается число из регистра 32. Время вычитания записанного числа будет равно n/fт, т.е. периоду сигнала на входе одновибратора 29. Таким образом, при соответствии периодов с ДДС заданным границам, частота сигнала на выходе счетчика 31 будет равна частоте сигнала, поступающего на вход одновибратора 29 от ДДС 1.
При отклонении периодов с ДДС 1 за заданные границы импульсы записи на управляющем входе регистра 32 будут отсутствовать. Тогда на выходе счетчика 31 частота импульсов будет определяться последним значением периода, записанным в регистр 32 из счетчика 33.
Вариант реализации блока ограничения работы по памяти приведен на фиг.4, который содержит последовательно соединенные счетчики, например 564ИЕ10, имеющие вход блокировки счета. При наличии импульсов с блока сравнения периодов счетчики обнуляются. В том случае, если периоды с ДДС не укладываются в заданные пределы, и, соответственно, нет сигнала обнуления, то через определенное количество импульсов на счетном входе на выходе последнего счетчика вырабатывается сигнал, блокирующий дальнейший счет и устанавливающий дополнительный переключатель режимов 10 в положение Б (фиг.1). Максимальный путь, проходимый в режиме работы по памяти, определяется в данном случае емкостью последовательно соединенных счетчиков.
Для реализации блока усреднения периодов может быть использован двоичный счетчик в режиме деления частоты входного сигнала, а в качестве переключателей режима работы микросхемы электронных коммутаторов, управляемых логическими сигналами.
В качестве накапливающих и вычитающих счетчиков могут быть использованы микросхемы 564ИЕ10 и 564ИЕ11 соответственно. Регистры могут быть реализованы на микросхемах 564ТМ3, схемы сравнения кодов на микросхемах 564ИП2, переключатели режима - на микросхемах 564КП2. Одновибраторы, элементы задержки и генераторы тактовой частоты могут быть реализованы аналогично схемам рис. 14-4, рис. 14-5 с. 266 и рис. 14-14 с. 275 [2] соответственно.
Таким образом, реализация всех блоков заявляемого устройства возможна на серийных элементах.
Изготовлен опытный образец устройства, прошедший испытания на автомобиле с положительными результатами.
Источники информации
1. Патент РФ на изобретение №2092857, G 01 P 3/00. Устройство для измерения скорости наземного подвижного объекта //Голубев А.И., Плаксин Б.И., Попков А.Г., приоритет 03.01.83 г. БИ №28, 1997 г., с.360.
2. Зельдин Е.А. Цифровые интегральные микросхемы в информационно-измерительной аппаратуре. Л.: Энергоатомиздат, 1986, рис. 14-4, рис. 14-5 с.266, рис. 14-14 с.275.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 1983 |
|
RU2092857C1 |
| КОМПЛЕКСИРОВАННЫЙ ДОПЛЕРОВСКИЙ МОДУЛЬ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2213981C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТОМ | 2015 |
|
RU2584794C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2549607C1 |
| Устройство контроля качества датчиков времени | 1986 |
|
SU1422218A1 |
| ДОПЛЕРОВСКИЙ ДАТЧИК ПРИРАЩЕНИЙ ПУТИ С УСТРОЙСТВОМ СТЕНДОВОЙ КАЛИБРОВКИ | 2003 |
|
RU2246737C1 |
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ДЛЯ ПРОВЕРКИ ДОПЛЕРОВСКИХ ПУТЕВЫХ СИСТЕМ | 2001 |
|
RU2222029C2 |
| Устройство для контроля и регистрации маневров главного судового двигателя | 1982 |
|
SU1071529A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
Изобретение может использоваться, например, в наземной навигации для измерения скорости и пройденного расстояния. Сущность предлагаемого технического решения заключается в том, что в устройство измерения скорости, содержащее доплеровский датчик скорости, механический датчик скорости, переключатель режима, частотный компаратор, преобразователь частота-код, введены блок сравнения периодов, блок усреднения периодов, дополнительный переключатель режима, блок запоминания кода, блок ограничения работы по памяти, преобразователь код-частота. Блок сравнения периодов содержит генератор тактовой частоты, первый и второй одновибраторы, первый и второй элементы задержки, делитель частоты, двухвходовый элемент ИЛИ, вычитающий счетчик, параллельный регистр, первый и второй суммирующие счетчики, первую и вторую схемы сравнения кодов, трехвходовый элемент И. Технический результат - повышение точности измерения скорости и пройденного расстояния. 1 з.п. ф-лы, 4 ил.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 1983 |
|
RU2092857C1 |
| US 5812250 А, 22.09.1998 | |||
| US 5696578 А, 09.12.1998 | |||
| GB 1468159 А, 23.03.1977 | |||
| DE 19500114 А1, 18.07.1996. | |||

