Заявляемое устройство относится к области навигации и представляет собой датчик скорости, предназначенный для работы в составе аппаратуры счисления координат (АСК) наземного транспортного средства (НТС).
В настоящее время в АСК воздушных, морских и наземных транспортных средств применяются различные датчики скорости: доплеровские датчики скорости (ДДС), называемые при применении на судах доплеровскими радиолагами (ДРЛ), датчики воздушной скорости (ДВС), механические датчики скорости (МДС) и несколько типов корабельных относительных лагов и т.д. [1], [2], [3].
Исходя из условий применения, самолетные ДДС должны быть работоспособными на расстояниях до рассеивающей излучаемый сигнал поверхности, измеряемых километрами, а ДДС для судов и НТС работают при расстояниях от единиц до нескольких десятков метров, что определяет различия их конструкций. При этом они состоят из нескольких однолучевых ДДС, функционально объединенных в один ДДС или ДРЛ.
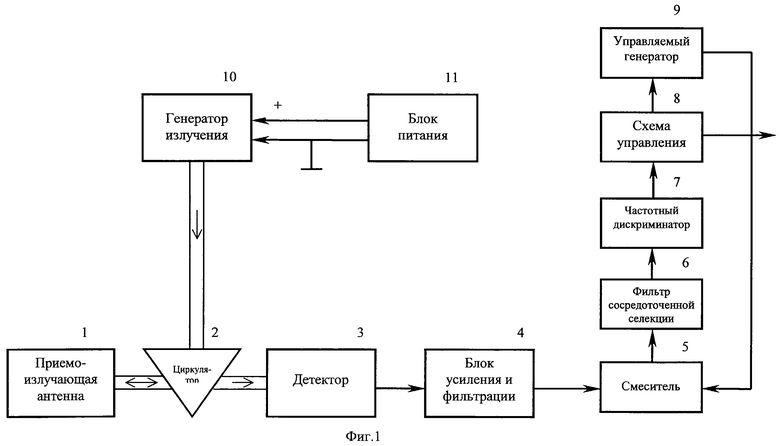
Известный однолучевой ДДС, принятый за прототип, используемый в составе ДДС судна [1, с.81-83], содержит (фиг.1) последовательно соединенные приемоизлучающую антенну 1, циркулятор 2, детектор 3, блок усиления и фильтрации 4, смеситель 5, фильтр сосредоточенной селекции 6, частотный дискриминатор 7, схему управления 8 и управляемый генератор 9, а также генератор излучения 10 и его блок питания 11, при этом волноводный выход-вход генератора излучения 10 соединен с соответствующим входом циркулятора 2, а контакты питания генератора излучения 10 соединены с соответствующими выходами блока питания 11, один из которых соединен с общей шиной, выход управляемого генератора 9 соединен со вторым входом смесителя 5, а второй выход схемы управления 8 является выходом всего ДДС.
При включении ДДС напряжение питания поступает на все узлы, при этом выходной сигнал генератора излучения 10 через циркулятор 2 поступает по волноводу на вход приемоизлучающей антенны 1 и излучается в направлении поверхности воды, сигнал, принимаемый приемоизлучающей антенной 1 после отражения поверхностью воды, по тому же волноводу поступает в циркулятор 2. Поскольку циркулятор 2 представляет собой неидеальный и невзаимный элемент, то поступивший из генератора излучения 10 сигнал излучения в основном проходит в приемоизлучающую антенну 1, а 3-10% его - в детектор 3, сигнал, поступивший из приемоизлучающей антенны 1, в такой же пропорции делится между детектором 3 и генератором излучения 10. Такое свойство циркулятора обеспечивает поступление на вход 3 по одному волноводу суммы гетеродинного сигнала с частотой fИ, представляющего собой часть излучаемого сигнала генератора излучения 10, и практически всего принятого сигнала с частотой fИ±fД (fИ - частота излучаемого сигнала, fИ±fД - частота принимаемого сигнала, fД - доплеровский сдвиг частоты принимаемого сигнала). Детектор представляет собой простой детектор огибающей суммы двух сигналов, поступающих на его вход, и формирует на своем выходе сигнал, состоящий из постоянного напряжения, образованного из выпрямленного сигнала гетеродина, и переменного напряжения, пропорционального биениям огибающей суммарного сигнала на входе, происходящим с разностной частотой, т.е. частотой, равной доплеровскому сдвигу. Переменный сигнал (доплеровский сигнал) после усиления в блоке усиления и фильтрации 4 поступает в систему частотной автоподстройки частоты управляемого генератора на первый вход смесителя 5, на второй вход которого поступает выходной сигнал с управляемого генератора 9, на управляющий вход которого поступает постоянное напряжение с выхода частотного дискриминатора 7 через схему управления 8, образованное из переменного профильтрованного выходного сигнала смесителя 5.
Выходной сигнал частотного дискриминатора 7, настроенного на начальную (в отсутствии сигнала управления) частоту управляемого генератора 9, равную fО, пропорционален отклонению частоты выходного сигнала смесителя 5 от fО. Связь между fД, fО и fУГ задается уравнением
fУГ=fО+ΔfС (fО-fСМ)=fО+ΔfС [fО-(fД+fУГ)],
откуда получим
fУГ(1+ΔfС)=fО+ΔfС•fО-ΔfС•fД
и
Выходной сигнал частотного дискриминатора 7, который идет к потребителю схемы управления 8, равен:
Здесь fО - начальная частота управляемого генератора;
fУГ - текущая частота управляемого генератора;
fД - частота доплеровского сигнала,
fСМ - частота сигнала на выходе смесителя 5,
ΔfС - величина, характеризующая систему автоподстройки частоты, равная изменению частоты управляемого генератора при отклонении fСМ от fО на 1 Гц.
Отсюда видно, что действительно в данной аппаратуре вырабатывается сигнал, пропорциональный скорости движения в случае приема сигнала.
В случае потери сигнала, а это происходит при ровной (без волн) поверхности воды, сигнал отражается зеркально и не попадает на приемоизлучающую антенну. В этом случае схема управления запоминает последнее значение UВЫХ и передает его потребителю, а сама начинает поиск сигнала до его "захвата". При изменениях скорости движения в это время подобная работа приводит к появлению погрешности измерения. Кроме того, у фильтра 6, стоящего на выходе смесителя 5 и обеспечивающего подавление спектра помех, полоса пропускания постоянна и на малых скоростях движения становится во много раз больше спектра полезного сигнала, что увеличивает погрешности при движении с малой скоростью.
Недостатком прототипа является малая точность определения скорости ДДС в условиях НТС.
Предлагаемое изобретение направлено на повышение точности определения скорости ДДС в условиях НТС с его относительно малыми скоростями движения, частыми остановками, реверсами движения и тяжелой виброобстановкой.
Сущность изобретения заключается в том, что ДДС, содержащий приемо-излучающую антенну, генератор излучения, блок питания, блок усиления и фильтрации и смеситель, причем выход блока питания по напряжению питания соединен с контактом высокого напряжения генератора излучения, а нулевой провод - с общей шиной ДДС, выход блока усиления и фильтрации соединен с первым входом смесителя, а для повышения точности определения скорости за счет уменьшения вибропомех, уменьшения погрешности при поиске сигнала, уменьшения погрешностей в диапазоне скоростей движения, уменьшения погрешностей при попадании в луч движущихся рассеивателей, уменьшения числа случаев поиска сигнала в него введены нагрузочное сопротивление, механический датчик скорости (МДС), последовательно соединенные преобразователь частоты в код периода, масштабирующее устройство, первый усреднитель, ключевое устройство, арифметическое устройство, преобразователь кода периода в частоту, а также формирователь поправки, два формирователя сигналов сравнения, два формирователя сравниваемых сигналов и устройство сравнения параметров, при этом вход-выход приемоизлучающей антенны соединен с выходом генератора излучения, контакт нулевого потенциала которого соединен с общей шиной через сопротивление нагрузки, и с входом блока усиления и фильтрации, выход механического датчика скорости соединен с входом преобразователя частоты в период, выход преобразователя периода в частоту соединен со вторым входом смесителя и является выходом устройства, а выход смесителя соединен с входом формирователя поправки, выход которого соединен со вторым входом арифметического устройства, входы первого и второго формирователей о пороговой скорости соединены с выходами преобразователя частоты в код периода и арифметического устройства соответственно, а их выходы - с первыми входами схем "ИЛИ" и "И" соответственно, выход схемы "И" соединен с вторым входом схемы "ИЛИ", выход которой соединен со вторым входом схемы "ИЛИ" и управляющим входом блока питания, вход второго усреднителя соединен с выходом арифметического устройства, выход первого усреднителя - с первым входом блока сравнения, второй вход которого и второй вход ключевого устройства соединены с выходом второго усреднителя, управляющий вход - со вторым выходом второго формирователя сигнала о пороговой скорости, а выход блока сравнения - с управляющим входом ключевого устройства, входы формирователей сравниваемых сигналов соединены с выходом МДС и выходом преобразователя кода периода в частоту соответственно, а выходы - с первым и вторым входами устройства сравнения параметров, выход которого соединен с управляющим входом масштабирующего устройства.
Содержание заявки поясняется графическими материалами, где на фиг.1 приведена блок-схема ДДС-прототипа, а на фиг.2 - блок-схема комплексированного доплеровского модуля наземного транспортного средства (КДМ НТС).
Сведения, подтверждающие возможность осуществления изобретения с указанным выше техническим результатом, заключаются в следующем.
Заявляемое устройство - КДМ НТС (фиг.2) содержит приемоизлучающую антенну 1, генератор излучения 2, блок питания 3, блок усиления и фильтрации 4 и смеситель 5, при этом выход блока питания 3 по напряжению питания соединен с контактом высокого напряжения генератора излучения 2, а нулевой провод соединен с общей шиной КДМ НТС, выход блока усиления и фильтрации 4 соединен с первым входом смесителя 5, а для повышения точности определения скорости в него введены нагрузочное сопротивление RН 6, механический датчик скорости 7, последовательно соединенные преобразователь частоты в код периода 8, масштабирующее устройство 9, первый усреднитель 10, ключевое устройство 11, арифметическое устройство 12, преобразователь кода периода в частоту 13, а также формирователь поправки 14, два формирователя сигналов о пороговой скорости 15, 16, схема "ИЛИ" 17, схема "И" 18, второй усреднитель 19, блок сравнения 20, два формирователя сравниваемых сигналов 21, 22, устройство сравнения параметров 23, при этом вход-выход приемоизлучающей антенны 1 соединен с выходом генератора излучения 2, контакт нулевого потенциала которого соединен с общей шиной КДМ НТС через нагрузочное сопротивление RH 6 и с входом блока усиления и фильтрации 4, выход механического датчика скорости 7 соединен с входом преобразователя частоты в код периода 8, выход преобразователя кода периода в частоту 13 является выходом КДМ НТС и соединен со вторым входом смесителя 5, выход которого соединен с входом формирователя поправки 14, а выход последнего - со вторым входом арифметического устройства 12, входы первого и второго формирователей сигналов о пороговой скорости 15, 16 соединены с выходами преобразователя частоты в код периода 8 и арифметического устройства 12 соответственно, а их выходы по V≥0 и  соединены с первыми входами схем "ИЛИ" 17 и "И" 18 соответственно, выход последней соединен со вторым входом схемы "ИЛИ" 17, выход которой соединен со вторым входом схемы "И" 18 и управляющим входом блока питания 3, вход второго усреднителя 19 соединен с выходом арифметического устройства 12, выход первого усреднителя 10 - с первым входом блока сравнения 20, второй вход которого и второй вход ключевого устройства 11 соединены с выходом второго усреднителя 19, управляющий вход блока сравнения 20 - с вторым выходом формирователя сигнала о пороговой скорости 16, а выход - с управляющим входом ключевого устройства 11, входы формирователей сравниваемых сигналов 21, 22 соединены с выходами механического датчика скорости 7 и преобразователя кода периода в частоту 13 соответственно, выходы - с соответствующими входами устройства сравнения параметров 23, выход которого соединен с управляющим входом масштабирующего устройства 9.
соединены с первыми входами схем "ИЛИ" 17 и "И" 18 соответственно, выход последней соединен со вторым входом схемы "ИЛИ" 17, выход которой соединен со вторым входом схемы "И" 18 и управляющим входом блока питания 3, вход второго усреднителя 19 соединен с выходом арифметического устройства 12, выход первого усреднителя 10 - с первым входом блока сравнения 20, второй вход которого и второй вход ключевого устройства 11 соединены с выходом второго усреднителя 19, управляющий вход блока сравнения 20 - с вторым выходом формирователя сигнала о пороговой скорости 16, а выход - с управляющим входом ключевого устройства 11, входы формирователей сравниваемых сигналов 21, 22 соединены с выходами механического датчика скорости 7 и преобразователя кода периода в частоту 13 соответственно, выходы - с соответствующими входами устройства сравнения параметров 23, выход которого соединен с управляющим входом масштабирующего устройства 9.
При трогании НТС с места сигнал механического датчика скорости 7 через преобразователь частоты в код периода 8 поступает на формирователь сигнала о пороговой скорости 15, на выходе которого появляется сигнал V≥0 (движение, ход). Этот сигнал через схему "ИЛИ" 17 поступает на второй вход схемы "И" 18 и на управляющий вход блока питания 3. В ответ на это блок питания 3 подает напряжение на генератор излучения 2, излучаемый сигнал которого начнет излучаться по направлению к поверхности земли, отражаться от нее и поступать снова в антенну, из которой он по одному и тому же с излучаемым сигналом волноводу поступает в резонаторную камеру генератора излучения 2. В результате сложения генерируемого и принятого сигналов в резонаторе образуется суммарный сигнал. В первом приближении у этого сигнала имеют место биения амплитуды, совершаемые с разностной частотой, в данном случае с частотой доплеровского сдвига. Поскольку в резонаторе появляется сигнал с биениями, то это приводит к небольшим колебаниям проходящего через генератор тока от блока питания 3. Обусловлено это тем, что амплитуда генерируемого сигнала на своем уровне ограничивается нелинейностями вольт-амперной характеристики активного элемента. Появление биений приводит к колебаниям рабочего тока. При проходе этого тока через сопротивление нагрузки 6 RH на нем выделяется падение напряжения, переменная часть которого поступает в блок усиления и фильтрации 4. После усиления, фильтрации и преобразования в импульсы типа "меандр" этот сигнал поступает на первый вход смесителя 5, на втором входе которого присутствует сигнал, полученный от механического датчика скорости 7 после его перевода в код периода, масштабирования (приведения периода номинально к величине периода сигнала с блока усиления и фильтрации 4), усреднения и обратного преобразования в частоту. С этого момента смеситель 5 вырабатывает сигнал о фазовой расстройке обоих сигналов, этот сигнал в формирователе поправки 14 преобразуется в поправку, прибавляемую к периоду, подаваемому на вход арифметического устройства 12. При нахождении частоты механического датчика скорости 7 в пределах зоны подстройки (слежения) произойдет "захват" сигнала и на выходе преобразователя кода периода в частоту 13 образуется импульсный сигнал, частота которого изменяется синхронно с изменениями частоты сигнала блока усиления и фильтрации 4. После выработки усреднителем 19 усредненного значения выходного периода  блок сравнения 20 сравнивает его с периодом механического датчика скорости ТМ и в случае их расхождения не более заданной величины и при V>15 км/ч переводит систему реализованной таким образом фазовой автоподстройки частоты (СФАПЧ) на автономный режим работы, т.е. на вход арифметического устройства 12 будет подаваться усредненный период выходного сигнала на
блок сравнения 20 сравнивает его с периодом механического датчика скорости ТМ и в случае их расхождения не более заданной величины и при V>15 км/ч переводит систему реализованной таким образом фазовой автоподстройки частоты (СФАПЧ) на автономный режим работы, т.е. на вход арифметического устройства 12 будет подаваться усредненный период выходного сигнала на  , а
, а  . Одновременно начинается накопление выходных импульсов формирователем сравниваемых сигналов 21 и 22 для вычисления текущего отношения fМ и fД (частот МДС и ДДС), которое будет введено в масштабирующее устройство 9 вместо устанавливаемого там при включении номинального значения. В этом состоянии комплексированный доплеровский модуль наземного транспортного средства работает в нормальных дорожных условиях. При этом юз не выключает излучения, т.к. выходной сигнал формирователя сигнала о пороговой скорости 16, работающего от автономной СФАПЧ, не дает этому произойти пока с нее не будет получен сигнал V<5 км/ч.
. Одновременно начинается накопление выходных импульсов формирователем сравниваемых сигналов 21 и 22 для вычисления текущего отношения fМ и fД (частот МДС и ДДС), которое будет введено в масштабирующее устройство 9 вместо устанавливаемого там при включении номинального значения. В этом состоянии комплексированный доплеровский модуль наземного транспортного средства работает в нормальных дорожных условиях. При этом юз не выключает излучения, т.к. выходной сигнал формирователя сигнала о пороговой скорости 16, работающего от автономной СФАПЧ, не дает этому произойти пока с нее не будет получен сигнал V<5 км/ч.
Пробуксовка двигателей не влияет на показания КДМ НТС, т.к. формирователь сигнала о пороговой скорости 16 показывает, что V<15 км/ч, а при сигнале формирователя поправки 16 V>15 км/ч блок сравнения 20 обнаруживает выход среднего выходного сигнала  за допуск, задаваемый с механического датчика скорости (МДС), но при этом он уже обусловлен попаданием движущихся рассеивателей (движущееся транспортное средство, выбросы грунта и т.п из-под двигателей) в луч. При обнаружении этого система переводится в начальное положение, т.е. в режим начала захвата, когда на выход идет сигнал подкалиброванного механического датчика скорости, такая конструкция КДМ НТС использует генератор излучения 2 в автодинном режиме работы, когда генераторный элемент является одновременно и детектором, что увеличивает виброустойчивость конструкции. Цифровая техника, на которой можно реализовать СФАПЧ КДМ НТС, обеспечивает на любой скорости одинаковые поправки, что обеспечивает ее малые погрешности. Юз и пробуксовка не приводят к нарушению работоспособности КДМ НТС, а при остановках система не выходит из зоны слежения.
за допуск, задаваемый с механического датчика скорости (МДС), но при этом он уже обусловлен попаданием движущихся рассеивателей (движущееся транспортное средство, выбросы грунта и т.п из-под двигателей) в луч. При обнаружении этого система переводится в начальное положение, т.е. в режим начала захвата, когда на выход идет сигнал подкалиброванного механического датчика скорости, такая конструкция КДМ НТС использует генератор излучения 2 в автодинном режиме работы, когда генераторный элемент является одновременно и детектором, что увеличивает виброустойчивость конструкции. Цифровая техника, на которой можно реализовать СФАПЧ КДМ НТС, обеспечивает на любой скорости одинаковые поправки, что обеспечивает ее малые погрешности. Юз и пробуксовка не приводят к нарушению работоспособности КДМ НТС, а при остановках система не выходит из зоны слежения.
Все это позволяет сделать вывод о достижении поставленной цели и применимости КДМ на НТС.
Источники информации
1. Судовые измерители скорости (справочник). - Л. : Судостроение, 1978.
2. Колчинский В.Е., Мандуровский И.А., Константиновский М.И. Автономные допплеровские устройства и системы навигации летательных аппаратов. - М.: Советское радио, 1975.
3. Флеров А.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации. - М.: Транспорт, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСИРОВАННЫЙ ДОПЛЕРОВСКИЙ МОДУЛЬ | 2001 |
|
RU2212686C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ПО ДВУМ СОСТАВЛЯЮЩИМ СКОРОСТИ | 2000 |
|
RU2184348C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| ОДНОЛУЧЕВОЙ ДОПЛЕРОВСКИЙ ДАТЧИК СКОРОСТИ ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2581771C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2242767C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ДОПЛЕРОВСКОЙ ЧАСТОТЫ | 1990 |
|
RU2231085C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
Изобретение относится к области навигации наземных транспортных средств. Изобретение представляет собой однолучевой доплеровский датчик, в котором в качестве управляемого генератора в системе слежения за частотой доплеровского сигнала использован механический датчик скорости с фазовой и частотной подстройкой его частоты по доплеровскому сигналу и с защитой от юза и пробуксовки. Достигаемым техническим результатом является устранение погрешности из-за потери и поиска сигнала. 2 ил.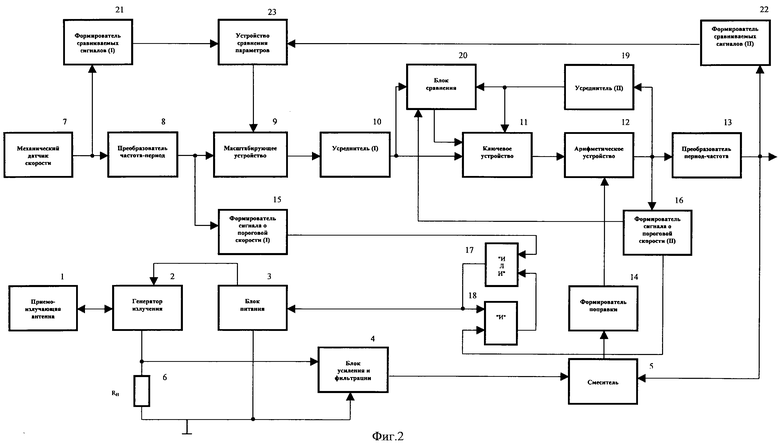
Комплексированный доплеровский модуль наземного транспортного средства (КДМ НТС), содержащий приемоизлучающую антенну, генератор излучения, блок питания, блок усиления, фильтрации и преобразования в импульсы типа "меандр" и смеситель, при этом выход блока питания по напряжению питания соединен с контактом высокого напряжения генератора излучения, а нулевой провод соединен с общей шиной всего комплексированного доплеровского модуля наземного транспортного средства, выход блока усиления, фильтрации и преобразования в импульсы типа "меандр" соединен с первым входом смесителя, отличающийся тем, что в него введены нагрузочное сопротивление RН, механический датчик скорости, последовательно соединенные преобразователь частоты в код периода, масштабирующее устройство, первый усреднитель, ключевое устройство, арифметическое устройство и преобразователь кода периода в частоту, а также формирователь поправки, два формирователя сигналов о пороговой скорости, схема ИЛИ, схема И, второй усреднитель, блок сравнения, два формирователя сравниваемых сигналов, устройство сравнения параметров, при этом вход-выход приемоизлучающей антенны соединен с выходом генератора излучения, контакт нулевого потенциала которого соединен с общей шиной комплексированного доплеровского модуля наземного транспортного средства через нагрузочное сопротивление RН и с входом блока усиления, фильтрации и преобразования в импульсы типа "меандр", выход механического датчика скорости соединен с входом преобразователя частоты в код периода, выход преобразователя кода периода в частоту является выходом комплексированного доплеровского модуля наземного транспортного средства и соединен со вторым входом смесителя, а выход смесителя соединен с входом формирователя поправки, выход которого соединен со вторым входом арифметического устройства, входы первого и второго формирователей сигналов о пороговой скорости соединены с выходами преобразователя частоты в код периода и арифметического устройства соответственно, а их выходы V≥0 и  соединены с первыми входами схем ИЛИ и И соответственно, выход схемы И соединен со вторым входом схемы ИЛИ, выход которой соединен с вторым входом схемы И и управляющим входом блока питания, вход второго усреднителя соединен с выходом арифметического устройства, выход первого усреднителя - с первым входом блока сравнения, второй вход которого и второй вход ключевого устройства соединены с выходом второго усреднителя, управляющий вход блока сравнения соединен со вторым выходом второго формирователя сигнала о пороговой скорости, а выход - с управляющим входом ключевого устройства, входы первого и второго формирователей сравниваемых сигналов соединены с выходами механического датчика скорости и преобразователя кода периода в частоту соответственно, а выходы - с соответствующими входами устройства сравнения параметров, выход которого соединен с управляющим входом масштабирующего устройства.
соединены с первыми входами схем ИЛИ и И соответственно, выход схемы И соединен со вторым входом схемы ИЛИ, выход которой соединен с вторым входом схемы И и управляющим входом блока питания, вход второго усреднителя соединен с выходом арифметического устройства, выход первого усреднителя - с первым входом блока сравнения, второй вход которого и второй вход ключевого устройства соединены с выходом второго усреднителя, управляющий вход блока сравнения соединен со вторым выходом второго формирователя сигнала о пороговой скорости, а выход - с управляющим входом ключевого устройства, входы первого и второго формирователей сравниваемых сигналов соединены с выходами механического датчика скорости и преобразователя кода периода в частоту соответственно, а выходы - с соответствующими входами устройства сравнения параметров, выход которого соединен с управляющим входом масштабирующего устройства.
| Судовые измерители скорости | |||
| Справочник | |||
| - Л.: Судостроение, 1978, с.81-83 | |||
| ИЗМЕРИТЕЛЬ СКОРОСТИ ОБЪЕКТА | 1997 |
|
RU2126544C1 |
| DE 19914486, 18.05.2000 | |||
| US 6072425, 06.06.2000. | |||

