Изобретение относится к функциональным устройствам для бортовых систем управления беспилотными летательными аппаратами, в частности, для вычисления алгебраических функций с переменной n-го порядка в знаменателе. Так, в частности, в процессе полета летательного аппарата исчисляется угол атаки α (либо балансировочное значение α бал, либо текущее α t), например, для регулирования и ограничения перегрузки и др. В соответствии, например, с [1, 2] угол атаки α может быть рассчитан на основе значения подъемной силы веса летательного аппарата и коэффициента подъемной силы; последний при этом имеет сложную зависимость от α . С учетом ограничения числа членов для первого приближения, на основе метода итерации (последовательное вычисление переменной на следующем шаге по значению переменной на предыдущем шаге), угол α рассчитывается:
где α i, α i+1 - значения угла атаки, соответственно, на i-м и на (i+1)-m шагах;
А - параметр, характеризующий вес и компоненту подъемной силы при α =0;
В - параметр, характеризующий зависимость (производную) коэффициента подъемной силы летательного аппарата от α .
В более общем случае возникает вопрос исчисления обобщенной переменной х для алгебраического выражения (1) с n-м порядком переменной (n≥ 1), т.е.
К известным можно отнести способ и устройство, формирующие переменную х по приближению для 0-го порядка [3], тогда  . В этом случае определение переменной х очень грубое, т.е. известные способ и устройство обладают невысокой точностью. Повышение порядка может привести при определенных соотношениях А и В к неточности и даже к неустойчивости итерационного процесса (последовательное вычисление хi+1 по хi).
. В этом случае определение переменной х очень грубое, т.е. известные способ и устройство обладают невысокой точностью. Повышение порядка может привести при определенных соотношениях А и В к неточности и даже к неустойчивости итерационного процесса (последовательное вычисление хi+1 по хi).
Наиболее близким к предлагаемому способу является способ формирования сигнала алгебраической функции с переменной n-го порядка в знаменателе для систем автоматического управления летательным аппаратом, заключающийся в том, что задают сигнал, соответствующий коэффициенту числителя, задают сигнал, соответствующий коэффициенту знаменателя, и формируют сигнал знаменателя [4].
Наиболее близким к предлагаемому устройству является кусочно-линейный преобразователь информации, содержащий задатчик коэффициента числителя, последовательно соединенные задатчик коэффициента знаменателя и блок вычитания [4].
Недостатком известных способа и устройства является невысокая точность и возможный срыв устойчивости процесса итерации.
Решаемой в предложенных способе и устройстве технической задачей является достижение устойчивости и повышение точности процесса итерации при наличии переменной n-го порядка в знаменателе.
Анализ зависимости (2) даже при n=1 показывает, что при определенном соотношении параметров А и В возможна неустойчивость процесса итерации. Процесс итерации при i→ ∞ определяет корректное действительное значение корня алгебраического уравнения на основе (1) и (2). Действительно, при n=1 алгебраическое выражение для (1) разрешимо относительно х:
т.е. на основе (3) получается алгебраическое уравнение 2-го порядка:
Вх-х2=А
или х2-Bx+A=0. (4)
Корнями (4) являются:
При 
корни X1,2 являются комплексными, т.е. действительного решения уравнения (4) не существует.
Непосредственный анализ (2) (в том числе и численный расчет) при выполнении условия (6) показывает, что итерационный процесс носит расходящийся характер как при х0=0, так и при х0≠0.
Из (6) виден и возможный путь к устойчивому решению, т.е. должно быть выполнено условие
Таким образом сформирован общий путь к решению поставленной задачи: уменьшить числитель, например, в К раз, К>1, далее вести итерационный процесс по уменьшенной переменной, а для выходной переменной увеличить соответственно в указанное К-раз уменьшенную итерационную переменную. Непосредственно для итерационного процесса введено квантование (временное) от i-го шага к (i+1)-му шагу.
Таким образом, указанный технический результат достигается тем, что в известный способ формирования сигнала алгебраической функции с переменной n-го порядка в знаменателе для систем автоматического управления летательным аппаратом, заключающийся в том, что задают сигнал, соответствующий коэффициенту числителя, задают сигнал, соответствующий коэффициенту знаменателя и формируют сигнал знаменателя, дополнительно задают опорный сигнал с уровнем К, К>1, формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего коэффициенту числителя, на опорный сигнал, формируют сигнал итерации посредством деления уменьшенного сигнала числителя на сигнал знаменателя, который формируют посредством вычитания из сигнала, соответствующего коэффициенту знаменателя, сигнала вида у
Технический результат достигается также тем, что в известное устройство формирования сигнала алгебраической функции с переменной n-го порядка в знаменателе для систем автоматического управления летательным аппаратом, содержащее задатчик коэффициента числителя, последовательно соединенные задатчик коэффициента знаменателя и блок вычитания, дополнительно введены задатчик опорного сигнала, первый и второй блоки деления, квантователь, блок формирования сигнала вида у
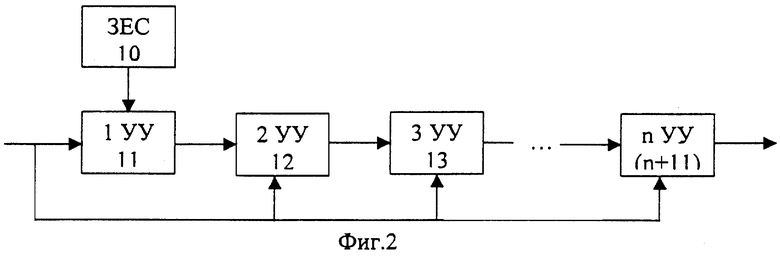
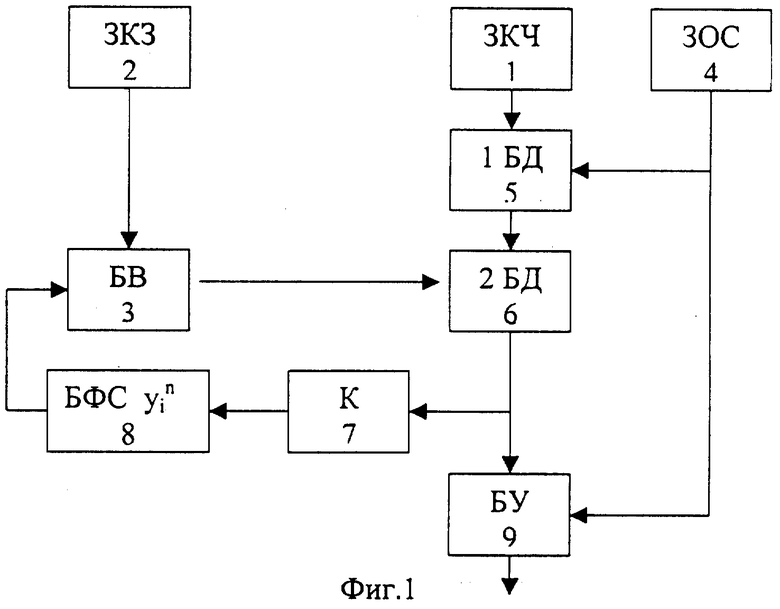
На фиг.1 представлена структурная схема устройства, реализующего способ, на фиг.2 представлена структурная схема блока формирования сигнала вида у
Устройство формирования сигнала алгебраической функции с переменной n-го порядка в знаменателе (фиг.1) содержит задатчик коэффициента числителя 1(ЗКЧ), последовательно соединенные задатчик коэффициента знаменателя 2 (ЗКЗ) и блок вычитания 3 (БВ), задатчик опорного сигнала 4 (ЗОС), первый 5 (1 БД) и второй 6 (2 БД) блоки деления, квантователь 7 (К), блок формирования сигнала вида у
Блок формирования сигнала вида у
Устройство, реализующее предложенный способ, работает следующим образом.
Сигналы, соответствующие параметрам А и В в соответствии с (2), задаются блоками 1 и 2 соответственно. Сигнал К (К>1) для обеспечения устойчивости процесса итерации определен (выставлен) в блоке 4, что обеспечивает в дальнейшем уменьшение числителя - на выходе блока 5 формируется сигнал  . Соответственно, в дальнейшем восстановление выходного сигнала осуществляется посредством умножения уменьшенного сигнала у=yi+1 на К в блоке 9. В блоке 6 формируется сигнал итерации с учетом начального значения у0=0 посредством деления сигнала
. Соответственно, в дальнейшем восстановление выходного сигнала осуществляется посредством умножения уменьшенного сигнала у=yi+1 на К в блоке 9. В блоке 6 формируется сигнал итерации с учетом начального значения у0=0 посредством деления сигнала  на сигнал (В-у
на сигнал (В-у
При этом частота квантования специально не регламентируется, так как может быть невысокой для летательного аппарата (изменение массы летательного аппарата и аэродинамических характеристик достаточно медленное) и определяется тактом реальной БЦВМ на борту летательного аппарата.
Сигнал вида у
Блок формирования сигнала вида у
Таким образом, при знаменателе по переменной 1-го порядка задействованы блоки 11 и 12; 2-го порядка: блоки 11,12,13 и т.д.
Положительный эффект данного способа и устройства подтвержден непосредственно математическим анализом и результатами математического моделирования.
Все звенья устройства являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники, а непосредственно способ может быть реализован программно-алгоритмически в БЦВМ летательного аппарата.
Таким образом, предлагаемые способ и устройство позволяют обеспечить устойчивость процесса итерации и требуемую точность.
Источники информации
1. Аэродинамика, устойчивость и управление сверхзвуковых самолетов. Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998, с.723.
2. А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов. М.: Машиностроение, 1973, с.147, 281.
3. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.103.
4. В.Б.Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с.53.
Изобретение относится к функциональным устройствам для бортовых систем управления беспилотными летательными аппаратами и предназначено, в частности, для вычисления алгебраических функций с переменной n-го порядка в знаменателе. Технический результат изобретения заключается в достижении устойчивости и повышении точности процесса итерации при наличии переменной n-го порядка в знаменателе. Предлагаемый способ заключается в том, что формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего числителю, на опорный сигнал, квантуют по времени сигнал итерации, из полученного сигнала формируют сигнал степенной функции, при этом сигнал итерации формируют посредством деления уменьшенного сигнала числителя на сигнал знаменателя, и формируют выходной сигнал, равный умножению сигнала итерации на опорный сигнал. Устройство для реализации способа содержит задатчик коэффициента числителя, задатчик коэффициента знаменателя, блок вычитания, задатчик опорного сигнала, два блока деления, блок формирования сигнала степенной функции, квантователь и блок умножения, а блок формирования сигнала степенной функции содержит задатчик единичного сигнала и n устройств умножения. 2 с. и 1 з.п. ф-лы, 2 ил.
| СМОЛОВ В.Б | |||
| Функциональные преобразователи информации, Ленинград, Энергоиздат, 1981, с | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
