Изобретение относится к функциональным устройствам для бортовых систем управления беспилотными летательными аппаратами. Так, в процессе полета летательного аппарата вычисляется угол атаки α (либо балансировочное значение α бал., либо текущее α t), например, для регулирования и ограничения перегрузки для телеметрических измерений и др. В соответствии, например, с [1, 2] угол атаки α может быть рассчитан на основе знания веса летательного аппарата, перегрузки в процессе полета и аэродинамических характеристик в части коэффициента подъемной силы, последний при этом имеет сложную зависимость от угла атаки α . С учетом ограничения числа членов для первого приближения, на основе метода итерации (последовательное вычисление переменной на следующем шаге по значению переменной на предыдущем шаге), угол α рассчитывается:
где α i, α i+1 - значения угла атаки соответственно на i-ом и на (i+1)-м шагах;
А - параметр, характеризующий вес летательного аппарата, перегрузку и компоненту подъемной силы при α =0;
В - параметр, характеризующий зависимость коэффициента подъемной силы летательного аппарата от α , т.е. при α ≠ 0.
В более общем случае возникает вопрос вычисления переменной α для алгебраического выражения (1) с n-м порядком переменной (n≥ 1), т.е.
К известным можно отнести способ и устройство, формирующие переменную α по приближению для 0-го порядка [3], тогда  В этом случае определение переменной α очень грубое, т.е. известные способ и устройство обладают невысокой точностью. Повышение порядка может привести при определенных соотношениях А и В к неточности и даже к неустойчивости итерационного процесса (последовательное вычисление α i+1 по α i).
В этом случае определение переменной α очень грубое, т.е. известные способ и устройство обладают невысокой точностью. Повышение порядка может привести при определенных соотношениях А и В к неточности и даже к неустойчивости итерационного процесса (последовательное вычисление α i+1 по α i).
Наиболее близким к предлагаемому способу является способ формирования сигнала с переменной второго порядка в знаменателе для систем автоматического управления летательным аппаратом, заключающийся в том, что задают сигнал, соответствующий коэффициенту числителя, задают сигнал, соответствующий коэффициенту знаменателя, и формируют сигнал знаменателя [4].
Наиболее близким к предлагаемому устройству является кусочно-линейный преобразователь информации, содержащий задатчик коэффициента числителя, последовательно соединенные задатчик коэффициента знаменателя и блок вычитания [4].
Недостатком известных способа и устройства является возможный срыв устойчивости процесса итерации и невысокая точность, возрастающая с ростом значений угла атаки.
Решаемой в предложенных способе и устройстве технической задачей является достижение устойчивости, повышение точности процесса итерации и ограничение диапазона расчета углов атаки.
Анализ зависимости (2) даже при n=1 показывает, что при определенном соотношении параметров А и В возможна неустойчивость процесса итерации. Процесс итерации при i→ ∞ определяет корректное действительное значение корня алгебраического уравнения на основе (1) и (2). Действительно, при n=1 алгебраическое выражение для (2) разрешимо относительно α :
т.е. на основе (3) получается алгебраическое уравнение второго порядка:
α 2-Bα +A=0. (4)
Корнями (4) являются


корни α 1,2 по (5) являются комплексными, т.е. действительного решения уравнения (4) не существует.
Непосредственный анализ (3) (в том числе и численный расчет) при выполнении условия (6) показывает, что итерационный процесс носит расходящийся характер как при α 0=0, так и при α 0≠0.
Из (6) видна и возможность достижения устойчивого решения – должно быть выполнено условие
Таким образом формируем общий путь решения поставленной задачи: уменьшить числитель А в К раз, К>1, далее вести итерационный процесс по уменьшенной переменной
а для выходной переменной увеличить, соответственно, в указанное К раз уменьшенную итерационную переменную, т.е.
α i+1=yi+1·K. (9)
Непосредственно для итерационного процесса введено квантование (временное) от i-го шага к (i+1)-му шагу и запоминание квантованного сигнала.
Указанные приемы необходимы для реализации предлагаемых способа и устройства. Однако, как показывает анализ, при потребной реализации существенных значений К, примерно К>(4÷ 10), возникает погрешность в точности итерационного процесса. Также следует отметить, что реально необходимый (рабочий) диапазон углов α ограничен, отсутствие этого ограничения снижает точность процесса вычисления, поскольку в алгоритм закладываются интерполяционные данные аэродинамических характеристик (в данном случае коэффициентов А и В). Для повышения точности в этих условиях необходимо выходную переменную не только восстановить по итерационной переменной соответствующим умножением на К, но дополнительно скорректировать усилением с некоторым масштабным коэффициентом Кэк, точную величину которого вычислить довольно сложно, а при n>1 и в случае нестационарности А и В практически невозможно. Поэтому можно воспользоваться эмпирическим значением, которое составляет Кэк=1÷ 1,5 даже при очень больших значениях К (до 30). Для ограничения вычислительного процесса введено ограничение по итерационной переменной, пересчитанное по предельному уровню рабочего диапазона углов атаки, что позволяет в этих условиях более качественно интерполировать аэродинамические характеристики (коэффициенты А и В).
Таким образом, указанный технический результат достигается тем, что в известный способ формирования сигнала угла атаки летательного аппарата, заключающийся в том, что задают сигнал, соответствующий коэффициенту числителя, задают сигнал, соответствующий коэффициенту знаменателя, и формируют сигнал знаменателя, дополнительно задают опорный сигнал с уровнем К, К>1, масштабируют его, формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего коэффициенту числителя, на опорный сигнал, задают ограниченный опорный сигнал итерации, формируют сигнал итерации посредством деления уменьшенного сигнала числителя на сигнал знаменателя, ограничивают сигнал итерации в соответствии с заданным ограниченным опорным значением, квантуют по времени ограниченный сигнал итерации, запоминают квантованный сигнал, формируют сигнал вида yi 2, где yi представляет собой запомненный сигнал, сформированный сигнал вычитают из сигнала, соответствующего коэффициенту знаменателя, формируя тем самым сигнал знаменателя, а выходной сигнал формируют путем умножения ограниченного сигнала итерации на масштабированный опорный сигнал.
Технический результат достигается также тем, что в известное устройство формирования сигнала угла атаки летательного аппарата, содержащее задатчик коэффициента числителя, последовательно соединенные задатчик коэффициента знаменателя и блок вычитания, дополнительно введены ограничитель сигнала, инвертор и задатчик уровня ограничения, задатчик опорного сигнала, первый и второй блоки деления, блок выборки и хранения, блок формирования сигнала вида yi 2, где yi - сигнал на выходе блока выборки и хранения, масштабирующий усилитель и блок умножения, выход задатчика коэффициента числителя соединен через последовательно соединенные первый и второй блоки деления, ограничитель сигнала и блок умножения с выходом устройства, выход ограничителя сигнала через последовательно соединенные блок выборки и хранения и блок формирования сигнала вида yi 2 соединен со вторым входом блока вычитания, выход которого соединен со вторым входом второго блока деления, а задатчик опорного сигнала соединен со вторым входом первого блока деления и через маштабирующий усилитель - со вторым входом блока умножения, выход задатчика уровня ограничения соединен со вторым входом ограничителя сигнала непосредственно, а с третьим входом - через инвертор, при этом блок формирования сигнала вида yi 2, где yi - сигнал на выходе блока выборки и хранения, содержит задатчик единичного сигнала и два устройства умножения, вход блока соединен через два последовательно соединенных устройства умножения с выходом блока и со вторым входом второго устройства умножения непосредственно, а второй вход первого устройства умножения соединен с выходом задатчика единичного сигнала.
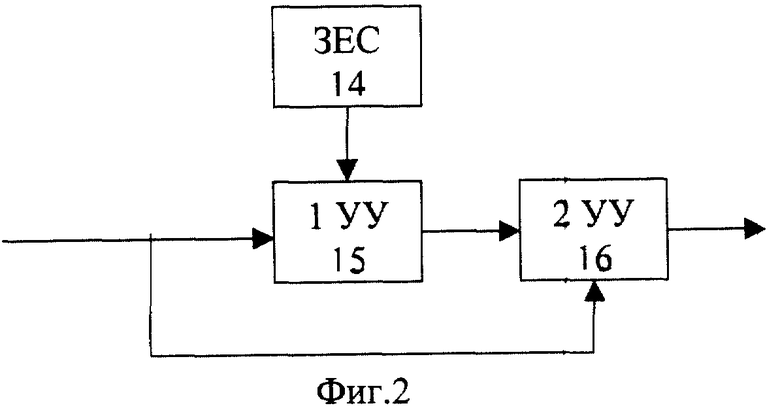
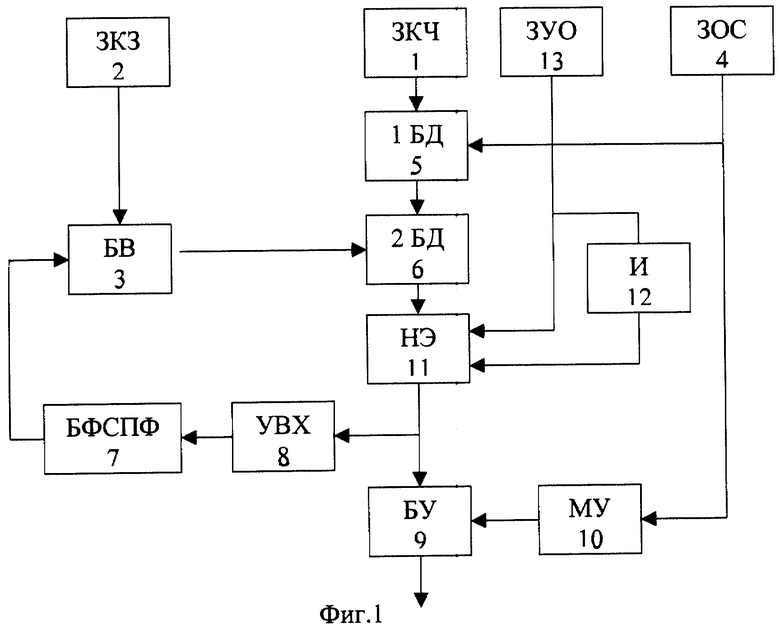
На фиг.1 представлена структурная схема устройства, реализующего способ, на фиг.2 представлена структурная схема блока формирования сигнала вида yi 2, где yi - сигнал на выходе блока выборки и хранения.
Устройство формирования сигнала угла атаки летательного аппарата (фиг.1) содержит задатчик коэффициента числителя 1 (ЗКЧ), последовательно соединенные задатчик коэффициента знаменателя 2 (ЗКЗ) и блок вычитания 3 (БВ), задатчик опорного сигнала 4 (ЗОС), первый 5 (1 БД) и второй 6 (2 БД) блоки деления, устройство выборки и хранения 7 (БВХ), блок формирования сигнала вида yi 2 - 8 (БФС yi 2), где yi - сигнал на выходе блока выборки и хранения 7, блок умножения 9 (БУ), масштабирующий усилитель 10 (МУ), ограничитель сигнала 11 (ОС), инвертор 12 (И) и задатчик уровня ограничения 13 (ЗУО), выход задатчика коэффициента числителя 1 соединен через последовательно соединенные первый 5 и второй 6 блоки деления, ограничитель сигнала 11 и блок умножения 9 с выходом устройства, выход ограничителя сигнала 11 через последовательно соединенные блок выборки и хранения 7 и блок формирования сигнала вида yi 2 - 8 соединен со вторым входом блока вычитания 3, выход которого соединен со вторым входом второго блока деления 6, а задатчик опорного сигнала 4 соединен со вторым входом первого блока деления 5 и через масштабирующий усилитель 10 со вторым входом блока умножения 9, выход задатчика уровня ограничения 13 соединен со вторым входом ограничителя сигнала 11 непосредственно, а с третьим входом - через инвертор 12.
Блок формирования сигнала вида yi 2 - 8, где yi - сигнал на выходе блока выборки и хранения 7, содержит задатчик единичного сигнала 14 (ЗЕС) и два устройства умножения 15 (1 УУ) и 16 (2 УУ), вход блока соединен через два последовательно соединенных устройства умножения 15 и 16 с выходом блока и со вторым входом второго устройства умножения 16 непосредственно, второй вход устройства умножения 15 соединен с выходом задатчика единичного сигнала 14.
Устройство, реализующее предложенный способ, работает следующим образом.
Сигналы, соответствующие параметрам А и В в соответствии с (2), задаются блоками 1 и 2 соответственно. Сигнал К (К>1) для обеспечения устойчивости процесса итерации определен (выставлен) в блоке 4, что обеспечивает в дальнейшем уменьшение числителя - на выходе блока 5 формируется сигнал  Соответственно, в дальнейшем восстановление выходного сигнала α осуществляется посредством умножения в блоке 9 сигнала итерации, ограниченного в блоке 11, на масштабированный сигнал, при этом ограничение определено задатчиком уровня ограничения 13 и реализовано ограничителем сигнала 11 с учетом инвертора 12, и на выходе ограничителя сигнала 11 получаем сигнал
Соответственно, в дальнейшем восстановление выходного сигнала α осуществляется посредством умножения в блоке 9 сигнала итерации, ограниченного в блоке 11, на масштабированный сигнал, при этом ограничение определено задатчиком уровня ограничения 13 и реализовано ограничителем сигнала 11 с учетом инвертора 12, и на выходе ограничителя сигнала 11 получаем сигнал

Коэффициент эмпирической коррекции Кэк определен в блоке 10. Таким образом, сигнал угла атаки  При этом yогр. выставляется в соответствии с допустимым рабочим уровнем, соответствующим по модулю α доп.
При этом yогр. выставляется в соответствии с допустимым рабочим уровнем, соответствующим по модулю α доп.
В блоке 6 формируется сигнал итерации с учетом начального значения yо=0 посредством деления сигнала  на сигнал (В-yi 2). Сигнал yi+1 формируется следующим образом. На выходе блока выборки и хранения 7 имеем сигнал yi, тогда сигнал на выходе блока 6:
на сигнал (В-yi 2). Сигнал yi+1 формируется следующим образом. На выходе блока выборки и хранения 7 имеем сигнал yi, тогда сигнал на выходе блока 6:

При этом частота квантования в блоке выборки и хранения 7 специально не регламентируется, так как может быть невысокой для летательного аппарата (изменение массы летательного аппарата и аэродинамических характеристик достаточно медленное) и определяется тактом реальной БЦВМ на борту летательного аппарата.
Сигнал вида yi 2 формируется блоком 8. С учетом yо=0 на выходе блока вычитания 3 сигнал равен В - yi 2.
Положительный эффект данного способа и устройства подтвержден непосредственно математическим анализом и результатами математического моделирования.
Все звенья устройства являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники, а непосредственно способ может быть реализован программно-алгоритмически в БЦВМ летательного аппарата. При этом блок выборки и хранения 7 назван в соответствии с [5] и включает в себя квантователь и фиксатор (экстраполятор нулевого порядка) квантованного сигнала.
Таким образом, предлагаемые способ и устройство позволяют обеспечить устойчивость процесса итерации и требуемую точность.
Источники информации
1. Аэродинамика, устойчивость и управление сверхзвуковых самолетов. Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998, с.723.
2. А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов. М.: Машиностроение, 1973, с.147, 281.
3. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.103.
4. В.Б.Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, ленинградское отделение, 1981, с.53.
5. Б.Куо. Теория и проектирование цифровых систем управления. Перевод с англ. М.: Машиностроение, 1986, с.26-29.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254604C2 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ СИГНАЛА УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2289840C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА АЛГЕБРАИЧЕСКОЙ ФУНКЦИИ С ПЕРЕМЕННОЙ N-ГО ПОРЯДКА В ЗНАМЕНАТЕЛЕ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242797C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КАНАЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2303805C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РУЛЕВЫМ ПРИВОДОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2681823C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| Устройство автоматического управления гидроциклоном | 1980 |
|
SU927321A1 |
| СПОСОБ МНОГОПАРАМЕТРИЧЕСКОГО СЛЕЖЕНИЯ ЗА НАВИГАЦИОННЫМИ СИГНАЛАМИ И ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С МНОГОПАРАМЕТРИЧЕСКИМ УСТРОЙСТВОМ СЛЕЖЕНИЯ ЗА СЛАБЫМИ СИГНАЛАМИ В УСЛОВИЯХ СВЕРХВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2012 |
|
RU2551805C2 |
Изобретение относится к функциональным устройствам для бортовых систем управления беспилотными летательными аппаратами. Технический результат изобретения заключается в достижении устойчивости, повышении точности процесса итерации и ограничении диапазона расчета углов атаки. Способ формирования сигнала угла атаки летательного аппарата заключается в том, что задают сигналы, соответствующие коэффициенту числителя и коэффициенту знаменателя, и формируют сигнал знаменателя, задают опорный сигнал с уровнем К, К>1, масштабируют его, формируют сигнал числителя посредством деления сигнала, соответствующего коэффициенту числителя, на опорный сигнал, задают ограниченный опорный сигнал итерации, формируют сигнал итерации, ограничивают его, квантуют по времени ограниченный сигнал итерации, запоминают квантованный сигнал, формируют сигнал вида уi 2, где yi представляет собой запомненный сигнал, сформированный сигнал вычитают из сигнала, соответствующего коэффициенту знаменателя, формируя тем самым сигнал знаменателя, а выходной сигнал формируют путем умножения ограниченного сигнала итерации на масштабированный опорный сигнал. Устройство для реализации данного способа содержит ограничитель сигнала, инвертор, задатчик уровня ограничения, задатчик коэффициента числителя, задатчик коэффициента знаменателя, блок вычитания, задатчик опорного сигнала, два блока деления, блок формирования сигнала вида yi 2, блок выборки и хранения, масштабирующий усилитель и блок умножения, а блок формирования сигнала yi 2 содержит задатчик единичного сигнала и два устройства умножения. 2 н. и 1 з.п. ф-лы, 2 ил.
| Вычислительное устройство | 1984 |
|
SU1206818A2 |
| Вычислительное устройство | 1986 |
|
SU1320819A1 |
| Устройство для определения частного от деления разности двух величин на их сумму | 1987 |
|
SU1501093A1 |
| Управляемое намагничивающее устройство | 1986 |
|
SU1406649A2 |
| US 3676661 А, 11.07.1972 | |||
| СМОЛОВ В.Б | |||
| Функциональные преобразователи информации | |||
| - Л.: Энергоиздат, 1981, с.53. | |||

