Изобретение относится к функциональным устройствам для бортовых систем управления беспилотными летательными аппаратами. Так, в процессе полета летательного аппарата в связи с отсутствием датчиков, непосредственно измеряющих угол атаки, значение этого угла α (балансировочное значение αбал.; текущее αt) вычисляется, например, в системе управления летательного аппарата для ограничения перегрузки, для оценки динамических характеристик ЛА по результатам телеметрических измерений и т.д. В соответствии, например, с [2, 3] угол атаки α может быть рассчитан на основе знания веса летательного аппарата, перегрузки в процессе полета и аэродинамической характеристики - коэффициента подъемной силы. Последний при этом имеет сложную математическую зависимость от α. С достаточной степенью точности значение α может быть определено на основе метода итерации, включающего в себя последовательное вычисление переменной на следующем шаге по значению переменной на предыдущем в соответствии со следующей математической зависимостью, содержащей в знаменателе степенную функцию
где αi, αi+1 - значения угла атаки соответственно на i-м и на (i+1)-м шагах.
В формуле (1)
А - параметр, характеризующий вес летательного аппарата, его вертикальную перегрузку и компоненту подъемной силы при α=0;
В - параметр, характеризующий первую производную коэффициента подъемной силы летательного аппарата по α.
Наиболее близким к предлагаемому способу является способ формирования сигнала алгебраической функции с переменной второго порядка в знаменателе для систем управления летательным аппаратом, заключающийся в том, что задают сигнал, соответствующий коэффициенту числителя, задают сигнал, соответствующий коэффициенту знаменателя, формируют сигнал знаменателя посредством вычитания из сигнала, соответствующего коэффициенту знаменателя, сигнала степенной функции вида  , где yi представляет собой проквантованный и запомненный сигнал итерации на предыдущем шаге, задают опорный сигнал с уровнем К, К>1, формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего коэффициенту сигнала числителя, на опорный сигнал, формируют сигнал итерации посредством деления уменьшенного сигнала числителя на сигнал знаменателя, а выходной сигнал формируют путем умножения полученного сигнала итерации на опорный сигнал [1].
, где yi представляет собой проквантованный и запомненный сигнал итерации на предыдущем шаге, задают опорный сигнал с уровнем К, К>1, формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего коэффициенту сигнала числителя, на опорный сигнал, формируют сигнал итерации посредством деления уменьшенного сигнала числителя на сигнал знаменателя, а выходной сигнал формируют путем умножения полученного сигнала итерации на опорный сигнал [1].
Наиболее близким к предлагаемому устройству является устройство формирования сигнала алгебраической функции с переменной N-го порядка в знаменателе для систем автоматического управления летательными аппаратами [1]. Устройство содержит задатчик сигнала коэффициента числителя, последовательно соединенные задатчик сигнала коэффициента знаменателя и блок вычитания, последовательно соединенные задатчик опорного сигнала коэффициента устойчивой итерации, первый блок деления, второй вход которого соединен с выходом задатчика сигнала коэффициента числителя, второй блок деления, второй вход которого соединен с выходом блока вычитания, блок умножения, второй вход которого соединен с выходом задатчика опорного сигнала коэффициента устойчивой итерации, а выход является выходом устройства, и последовательно соединенные квантователь, вход которого соединен с выходом второго блока деления, и блок формирования сигнала степенной функции, выход которого соединен со вторым входом блока вычитания [4].
Существенными признаками прототипа-способа, совпадающими с существенными признаками предлагаемого технического решения, является то, что задают сигнал, соответствующий коэффициенту числителя, задают сигнал, соответствующий коэффициенту знаменателя, формируют сигнал знаменателя посредством вычитания из сигнала, соответствующего коэффициенту знаменателя, сигнала степенной функции вида , где yi представляет собой проквантованный и запомненный сигнал итерации на предыдущем шаге, задают опорный сигнал с уровнем К, К>1, формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего коэффициенту сигнала числителя, на опорный сигнал, формируют сигнал итерации посредством деления уменьшенного сигнала числителя на сигнал знаменателя, а затем формируют результирующий сигнал путем умножения полученного сигнала итерации на опорный сигнал.
Существенными признаками прототипа-устройства, совпадающими с существенными признаками предлагаемого технического решения, являются - устройство для автономного формирования сигнала угла атаки летательного аппарата содержит задатчик сигнала коэффициента числителя, последовательно соединенные задатчик сигнала коэффициента знаменателя и блок вычитания, последовательно соединенные задатчик опорного сигнала коэффициента устойчивой итерации, первый блок деления, второй вход которого соединен с выходом задатчика сигнала коэффициента числителя, второй блок деления, второй вход которого соединен с выходом блока вычитания, блок умножения, второй вход которого соединен с выходом задатчика опорного сигнала коэффициента устойчивой итерации, и последовательно соединенные квантователь, вход которого соединен с выходом второго блока деления, и блок формирования сигнала степенной функции, выход которого соединен со вторым входом блока вычитания.
В процессе полета летательного аппарата в связи с отсутствием датчиков, непосредственно измеряющих угол атаки, значение этого угла α (балансировочное значение αбал.; текущее αt) вычисляется, например, в системе управления летательного аппарата для ограничения перегрузки, для оценки динамических характеристик ЛА по результатам телеметрических измерений и т.д. В соответствии, например, с [2, 3] угол атаки α может быть рассчитан на основе знания веса летательного аппарата, перегрузки в процессе полета и аэродинамической характеристики - коэффициента подъемной силы. Последний при этом имеет сложную математическую зависимость от α. С достаточной степенью точности значение α может быть определено на основе метода итерации, включающего в себя последовательное вычисление переменной на следующем шаге по значению переменной на предыдущем в соответствии со следующей математической зависимостью, содержащей в знаменателе степенную функцию
где αi, αi+1 - значения угла атаки соответственно на i-м и на (i+1)-м шагах.
В формуле (1)
А - параметр, характеризующий вес летательного аппарата, его вертикальную перегрузку и компоненту подъемной силы при α=0;
В - параметр, характеризующий первую производную коэффициента подъемной силы летательного аппарата по α.
Недостатком известного способа и устройства является возможная неустойчивость процесса итерации и невысокая точность, причем погрешность возрастает с ростом значений угла атаки.
Анализ зависимости (1) показывает, что при определенном соотношении параметров А и В возможна неустойчивость процесса итерации. Процесс итерации при i→∞ определяет корректное действительное значение корня алгебраического уравнения на основе (1). Действительно, например, при знаменателе для α в первой степени алгебраическое выражение для (1) разрешимо относительно α:
Из (2) получается алгебраическое уравнение второго порядка:

корнями которого являются
При
корни α1,2 по (4) являются комплексными, т.е. действительного решения уравнения (3) не существует.
Непосредственный анализ (2) при выполнении условия (5) показывает, что итерационный процесс носит расходящийся характер как при α0=0, так и при α0≠0.
Решаемой в предложенных способе и устройстве технической задачей является достижение устойчивости процесса итераций и ограничение диапазона разброса значений углов атаки при расчете, поскольку реально необходимый рабочий диапазон углов α ограничен. Это в свою очередь повышает качество управления летательным аппаратом и повышает вероятность невыхода режимов полета за ограничения по прочности.
Из (5) видна и возможность достижения устойчивого решения. А именно: должно быть выполнено условие

Введем коэффициент итерации Кит так, чтобы
Тогда коэффициент Кит, соответствующий устойчивому процессу, определяется как
Необходимо отметить, что в реальных условиях в связи с нестационарностью характеристик летательного аппарата имеет место диапазон значений A(t) и В(t), т.е.
Соответственно, выбор коэффициента Кит должен соответствовать всем сочетаниям А и В:
или, для большей надежности:
с учетом того, что параметры A(t) и B(t) некоррелированы.
Для математического представления процесса вычисления угла α летательного аппарата на основе формулы (1), т.е. при второй степени переменной в знаменателе, Кит определяется эмпирически как

а с учетом (11) и введением коэффициента запаса Кзап=(1,1÷1,5)

Таким образом, принцип решения поставленной задачи состоит в том, что новый числитель A1 формируется посредством уменьшения А в Кит раз:
и далее ведется итерационный процесс по уменьшенной переменной

а для выходной переменной увеличивается, соответственно, в указанное Кит раз уменьшенная итерационная переменная, т.е.

Кроме того, для итерационного процесса введено квантование по времени от i-го шага к (i+1)-му шагу и запоминание квантованного сигнала.
Указанные приемы необходимы для реализации предлагаемых способа и устройства. Следует отметить также, что реально необходимый рабочий диапазон углов α ограничен. Поэтому введено соответствующее ограничение выходного сигнала.
Таким образом, заявленный в предложенных способе и устройстве полезный технический результат достигается тем, что в известном способе формирования сигнала алгебраической функции с переменной второго порядка в знаменателе для систем управления летательным аппаратом, основанном на его вычислении по итерационной математической зависимости вида  , где αi, αi+1 - значения сигнала на i-м и на (i+1)-м шагах, А - коэффициент числителя, В - коэффициент знаменателя, заключающемся в том, что задают сигнал, соответствующий коэффициенту числителя, задают сигнал, соответствующий коэффициенту знаменателя, формируют сигнал знаменателя посредством вычитания из сигнала, соответствующего коэффициенту знаменателя, сигнала степенной функции вида , где yi представляет собой проквантованный и запомненный сигнал итерации на предыдущем шаге, задают опорный сигнал с уровнем Кит, формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего коэффициенту сигнала числителя, на опорный сигнал, формируют сигнал итерации посредством деления уменьшенного сигнала числителя на сигнал знаменателя, формируют результирующий сигнал путем умножения полученного сигнала итерации на опорный, в дополнение к этому результирующий сигнал ограничивают уровнем ограничения, соответствующим допустимому значению угла атаки, а коэффициент уровня опорного сигнал Кит, соответствующий значению устойчивого процесса итерации, задают равным
, где αi, αi+1 - значения сигнала на i-м и на (i+1)-м шагах, А - коэффициент числителя, В - коэффициент знаменателя, заключающемся в том, что задают сигнал, соответствующий коэффициенту числителя, задают сигнал, соответствующий коэффициенту знаменателя, формируют сигнал знаменателя посредством вычитания из сигнала, соответствующего коэффициенту знаменателя, сигнала степенной функции вида , где yi представляет собой проквантованный и запомненный сигнал итерации на предыдущем шаге, задают опорный сигнал с уровнем Кит, формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего коэффициенту сигнала числителя, на опорный сигнал, формируют сигнал итерации посредством деления уменьшенного сигнала числителя на сигнал знаменателя, формируют результирующий сигнал путем умножения полученного сигнала итерации на опорный, в дополнение к этому результирующий сигнал ограничивают уровнем ограничения, соответствующим допустимому значению угла атаки, а коэффициент уровня опорного сигнал Кит, соответствующий значению устойчивого процесса итерации, задают равным  где Кзап - коэффициент запаса, Аmax - максимальное значение коэффициента числителя А из реального диапазона значений, Вmin - минимальное значение коэффициента знаменателя из реального диапазона значений.
где Кзап - коэффициент запаса, Аmax - максимальное значение коэффициента числителя А из реального диапазона значений, Вmin - минимальное значение коэффициента знаменателя из реального диапазона значений.
Технический результат достигается тем, что в известное устройство автономного формирования сигнала алгебраической функции с переменной N-го порядка в знаменателе для систем автоматического управления летательными аппаратами, основанное на его вычислении по итерационной математической зависимости вида , где αi, αi+1 - значения сигнала на i-м и на (i+1)-м шагах, А - коэффициент числителя, В - коэффициент знаменателя, содержащее задатчик сигнала коэффициента числителя, последовательно соединенные задатчик сигнала коэффициента знаменателя и блок вычитания, последовательно соединенные задатчик опорного сигнала коэффициента устойчивой итерации, первый блок деления, второй вход которого соединен с выходом задатчика сигнала коэффициента числителя, второй блок деления, второй вход которого соединен с выходом блока вычитания, блок умножения, второй вход которого соединен с выходом задатчика опорного сигнала коэффициента устойчивой итерации, и последовательно соединенные квантователь, вход которого соединен с выходом второго блока деления, и блок формирования сигнала степенной функции, выход которого соединен со вторым входом блока вычитания, дополнительно введен нелинейный элемент с ограничением, вход которого соединен с выходом блока умножения, а выход является выходом устройства, а также тем, что коэффициент усиления задатчика опорного сигнала коэффициента устойчивой итерации Кит соответствует значению устойчивого процесса итерации и равен  где Кзап - коэффициент запаса, Аmax - максимальное значение коэффициента числителя А из реального диапазона значений, Вmin - минимальное значение коэффициента знаменателя из реального диапазона значений.
где Кзап - коэффициент запаса, Аmax - максимальное значение коэффициента числителя А из реального диапазона значений, Вmin - минимальное значение коэффициента знаменателя из реального диапазона значений.
Нелинейный элемент с ограничением представляет собой общеизвестную схему на операционном усилителе с стабилетронами, регулирующими уровень ограничений [4].
Отличительными признаками предлагаемого технического решения - способа управления - является то, что результирующий сигнал ограничивают уровнем ограничения, соответствующим допустимому значению угла атаки, а коэффициент уровня опорного сигнал Кит, соответствующий значению устойчивого процесса итерации, задают равным где Кзап - коэффициент запаса, Аmax - максимальное значение коэффициента числителя А из реального диапазона значений, Вmin - минимальное значение коэффициента знаменателя из реального диапазона значений.
Отличительными признаками предлагаемого технического решения - устройства - являются введение нелинейного элемента с ограничением, вход которого соединен с выходом блока умножения, а выход является выходом устройства, а также задание величины коэффициента усиления задатчика опорного сигнала коэффициента устойчивой итерации Кит,соответствующей значению, обеспечивающему устойчивость процесса итерации и равному где Кзап - коэффициент запаса, Аmax - максимальное значение коэффициента числителя А из реального диапазона значений, Вmin - минимальное значение коэффициента знаменателя из реального диапазона значений.
При этом, как показывают результаты проведенного математического моделирования, достигается устойчивость процесса итераций, а также ограничивается диапазон разброса значений углов атаки. Это в свою очередь повышает качество управления летательным аппаратом и повышает вероятность невыхода режимов полета за ограничения по прочности.
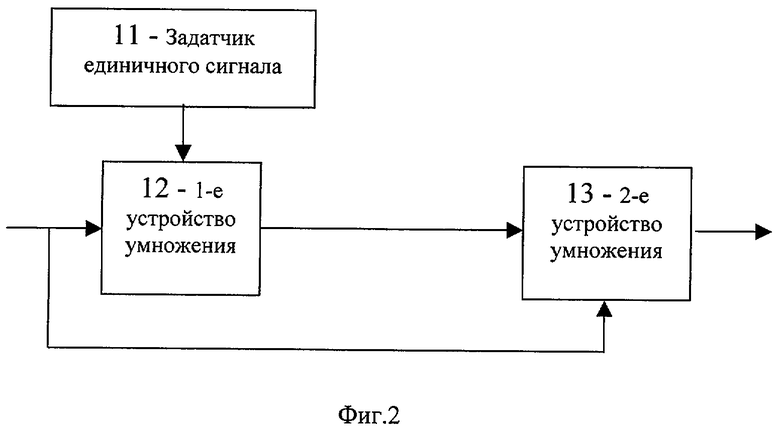
На фиг.1 представлена структурная схема устройства, реализующего способ, на фиг.2 представлена структурная схема блока формирования сигнала степенной функции.
Устройство автономного формирования сигнала угла атаки летательного аппарата (фиг.1) содержит задатчик сигнала коэффициента числителя 1, последовательно соединенные задатчик сигнала коэффициента знаменателя 2 и блок вычитания 3, последовательно соединенные задатчик опорного сигнала коэффициента устойчивой итерации 4, первый блок деления 5, второй вход которого соединен с выходом задатчика сигнала коэффициента числителя 1, второй блок деления 6, второй вход которого соединен с выходом блока вычитания 3, блок умножения 7, второй вход которого соединен с выходом задатчика опорного сигнала коэффициента устойчивой итерации 4, и нелинейный элемент с ограничением 8, выход которого является выходом устройства, и последовательно соединенные квантователь 9, вход которого соединен с выходом второго блока деления 6, и блок формирования сигнала степенной функции 10, выход которого соединен со вторым входом блока вычитания 3.
Блок формирования сигнала степенной функции 10 (фиг.2) содержит задатчик единичного сигнала 11 и два последовательно соединенных устройства умножения 12 и 13, причем вход блока соединен также со вторым входом второго устройства умножения 13, а второй вход первого устройства умножения 12 соединен с выходом задатчика единичного сигнала 11.
Устройство, реализующее предложенный способ, работает следующим образом.
Сигналы, соответствующие параметрам А и В, задаются блоками 1 и 2. Сигнал Кит, необходимый для обеспечения устойчивости процесса итерации, определен (выставлен) в блоке 4, что обеспечивает в дальнейшем требуемое изменение сигнала числителя - на выходе блока 5 формируется сигнал  . Соответственно, в дальнейшем восстановление результирующего сигнала угла атаки α осуществляется посредством умножения в блоке 7 сигнала y=yi+1 с выхода блока 6 на сигнал Кит с выхода блока 4. В блоке 6 формируется сигнал итерации с учетом начального значения y0=0 посредством деления сигнала A1 на сигнал
. Соответственно, в дальнейшем восстановление результирующего сигнала угла атаки α осуществляется посредством умножения в блоке 7 сигнала y=yi+1 с выхода блока 6 на сигнал Кит с выхода блока 4. В блоке 6 формируется сигнал итерации с учетом начального значения y0=0 посредством деления сигнала A1 на сигнал  . Сигнал yi+1 формируется следующим образом. На выходе квантователя 9 имеем сигнал yi, тогда сигнал на выходе блока 6
. Сигнал yi+1 формируется следующим образом. На выходе квантователя 9 имеем сигнал yi, тогда сигнал на выходе блока 6

При этом частота квантования в квантователе 9 специально не регламентируется, так как может быть невысокой для летательного аппарата (изменение массы летательного аппарата и аэродинамических характеристик достаточно медленное) и может определяться тактом реальной БЦВМ на борту летательного аппарата.
Сигнал степенной функции  формируется блоком 10. С учетом того, что y0=0, на выходе блока вычитания 3 сигнал равен
формируется блоком 10. С учетом того, что y0=0, на выходе блока вычитания 3 сигнал равен  .
.
На выходе нелинейного элемента с ограничением 8 формируется выходной сигнал устройства σ:

где αогр - уровень ограничения, определенный реально допустимым значением угла атаки α летательного аппарата.
Положительный эффект сформированного способа и разработанного устройства подтвержден непосредственно математическим анализом и результатами математического моделирования.
Все звенья для реализации способа и устройства являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники, а также в БЦВМ летательного аппарата. При этом квантователь 9 назван по [1, 6] и включает в себя квантователь и фиксатор (экстраполятор нулевого порядка) квантованного сигнала.
Таким образом, предлагаемые способ и устройство позволяют обеспечить устойчивость процесса итерации, требуемую точность и ограничение выходного сигнала.
Источники информации
1. Способ формирования сигнала алгебраической функции с переменной N-го порядка в знаменателе для систем автоматического управления летательным аппаратом и устройство для его осуществления. Патент №2242797 по заявке №2003113005/09 от 07.05.2003.
2. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998, с.723.
3. А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов. М.: Машиностроение, 1973, с.147, 281.
4. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.103.
5. В.Б.Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с.53.
6. Б.Куо. Теория и проектирование цифровых систем управления. Перевод с англ. М.: Машиностроение, 1986, с.26-29.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254604C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА АЛГЕБРАИЧЕСКОЙ ФУНКЦИИ С ПЕРЕМЕННОЙ N-ГО ПОРЯДКА В ЗНАМЕНАТЕЛЕ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242797C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2257605C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КАНАЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2303805C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ (СКОЛЬЖЕНИЯ) ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1800788A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РУЛЕВЫМ ПРИВОДОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2681823C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С ПЕРЕМЕННОЙ СТРУКТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491601C1 |
Изобретение относится к функциональным устройствам для бортовых систем управления беспилотными летательными аппаратами. Технической задачей изобретения является достижение устойчивости процесса итераций и ограничение диапазона разброса значений углов атаки при расчете. Способ автономного формирования сигнала угла атаки летательного аппарата, основанный на его вычислении по итерационной математической зависимости вида  где αi, αi+1 - значения угла атаки на i-м и на (i+1)-м шагах, задают опорный сигнал с уровнем Кит, соответствующим значению устойчивого процесса итерации и равным
где αi, αi+1 - значения угла атаки на i-м и на (i+1)-м шагах, задают опорный сигнал с уровнем Кит, соответствующим значению устойчивого процесса итерации и равным  ограничивают результирующий сигнал уровнем ограничения, соответствующим допустимому значению угла атаки. Устройство включает в себя задатчик коэффициента числителя, задатчик коэффициента знаменателя, блок вычитания, задатчик опорного сигнала коэффициента устойчивой итерации, два блока деления, блок выборки и хранения информации, блок формирования сигнала степенной функции, блок умножения и нелинейный элемент с ограничением. 2 н.п.ф-лы, 2 ил.
ограничивают результирующий сигнал уровнем ограничения, соответствующим допустимому значению угла атаки. Устройство включает в себя задатчик коэффициента числителя, задатчик коэффициента знаменателя, блок вычитания, задатчик опорного сигнала коэффициента устойчивой итерации, два блока деления, блок выборки и хранения информации, блок формирования сигнала степенной функции, блок умножения и нелинейный элемент с ограничением. 2 н.п.ф-лы, 2 ил.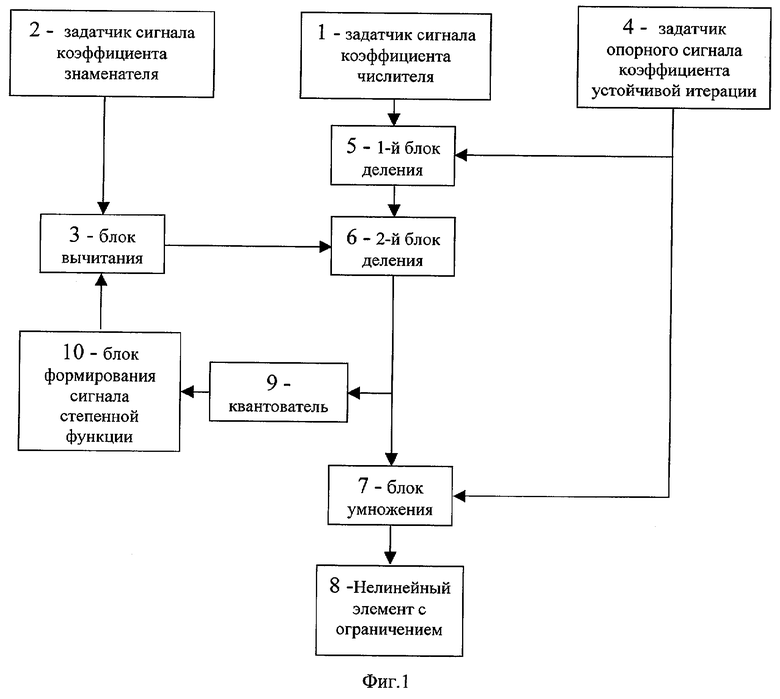

где α, αi+1 - значения угла атаки на i-ом и на (i+1)-ом шагах; А - коэффициент числителя - параметр, характеризующий вес, вертикальную перегрузку и компоненту подъемной силы при α=0; В - коэффициент знаменателя - параметр, характеризующий производную коэффициента подъемной силы по углу атаки, заключающийся в том, что задают сигнал, соответствующий коэффициенту числителя, задают сигнал, соответствующий коэффициенту знаменателя, формируют сигнал знаменателя посредством вычитания из сигнала, соответствующего коэффициенту знаменателя, сигнала степенной функции вида  , где Yi представляет собой проквантованный и запомненный сигнал итерации на предыдущем шаге, задают опорный сигнал с уровнем Кит, формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего коэффициенту сигнала числителя, на опорный сигнал, формируют сигнал итерации посредством деления уменьшенного сигнала числителя на сигнал знаменателя, формируют результирующий сигнал путем умножения полученного сигнала итерации на опорный сигнал, отличающийся тем, что результирующий сигнал ограничивают уровнем ограничения, соответствующим допустимому значению угла атаки, а коэффициент уровня опорного сигнал Кит, соответствующий значению устойчивого процесса итерации, задают равным
, где Yi представляет собой проквантованный и запомненный сигнал итерации на предыдущем шаге, задают опорный сигнал с уровнем Кит, формируют уменьшенный сигнал числителя посредством деления сигнала, соответствующего коэффициенту сигнала числителя, на опорный сигнал, формируют сигнал итерации посредством деления уменьшенного сигнала числителя на сигнал знаменателя, формируют результирующий сигнал путем умножения полученного сигнала итерации на опорный сигнал, отличающийся тем, что результирующий сигнал ограничивают уровнем ограничения, соответствующим допустимому значению угла атаки, а коэффициент уровня опорного сигнал Кит, соответствующий значению устойчивого процесса итерации, задают равным
где Кзап - коэффициент запаса;
Аmax - максимальное значение коэффициента числителя А из реального диапазона значений;
Вmin - минимальное значение коэффициента знаменателя из реального диапазона значений.

где αi, αi+1 - значения угла атаки на i-м и на (i+1)-м шагах;
А - коэффициент числителя - параметр, характеризующий вес, вертикальную перегрузку и компоненту подъемной силы при α=0;
В - коэффициент знаменателя - параметр, характеризующий производную коэффициента подъемной силы по углу атаки, содержащее задатчик сигнала коэффициента числителя, последовательно соединенные задатчик сигнала коэффициента знаменателя и блок вычитания, последовательно соединенные задатчик опорного сигнала коэффициента устойчивой итерации, первый блок деления, второй вход которого соединен с выходом задатчика сигнала коэффициента числителя, второй блок деления, второй вход которого соединен с выходом блока вычитания, блок умножения, второй вход которого соединен с выходом задатчика опорного сигнала коэффициента устойчивой итерации, и последовательно соединенные квантователь, вход которого соединен с выходом второго блока деления, и блок формирования сигнала степенной функции, выход которого соединен со вторым входом блока вычитания, отличающееся тем, что оно содержит нелинейный элемент с ограничением, вход которого соединен с выходом блока умножения, а выход является выходом устройства, а также тем, что коэффициент усиления задатчика опорного сигнала коэффициента устойчивой итерации Кит соответствует значению устойчивого процесса итерации и равен
Кзап - коэффициент запаса;
Аmax - максимальное значение коэффициента числителя А из реального диапазона значений;
Вmin - минимальное значение коэффициента знаменателя из реального диапазона значений.
| АНАЛОГОВОЕ УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ВЗЛЕТАСАМОЛЕТА | 0 |
|
SU232601A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА АЛГЕБРАИЧЕСКОЙ ФУНКЦИИ С ПЕРЕМЕННОЙ N-ГО ПОРЯДКА В ЗНАМЕНАТЕЛЕ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242797C1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| WO 2004108524, 16.12.2004. | |||

