1331
блока деления, выход квадратора соединен с вторым входом шестого блока умножения и первым входом второго блока вычитания, выход которого соединен с вторым входом первого блока деления, которого соединен с вторым входом второго блока умножения, выход третьего масштабного блока
1
Изобретение относится к области автоматического управления технологическими процессами обогащения и може найти применение на обогатительных фабриках цветной и черной металлургии .
Цель изобретения - повышение качества концентрата путем устранения перерегулирования.
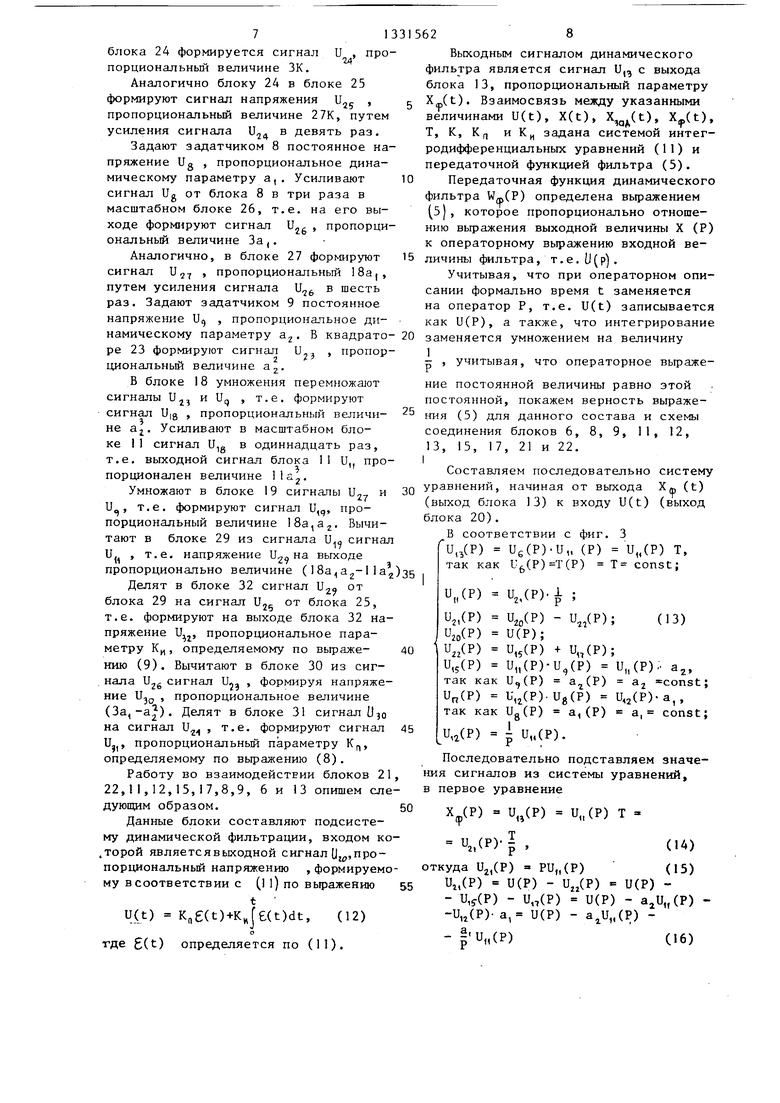
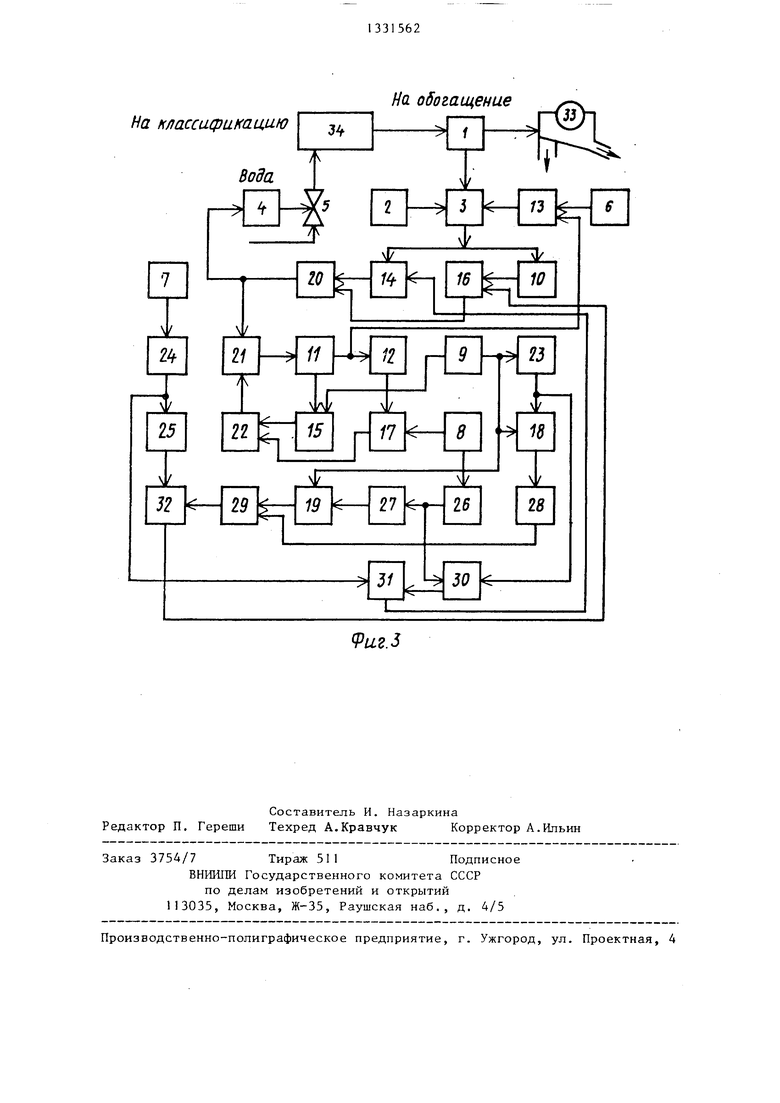
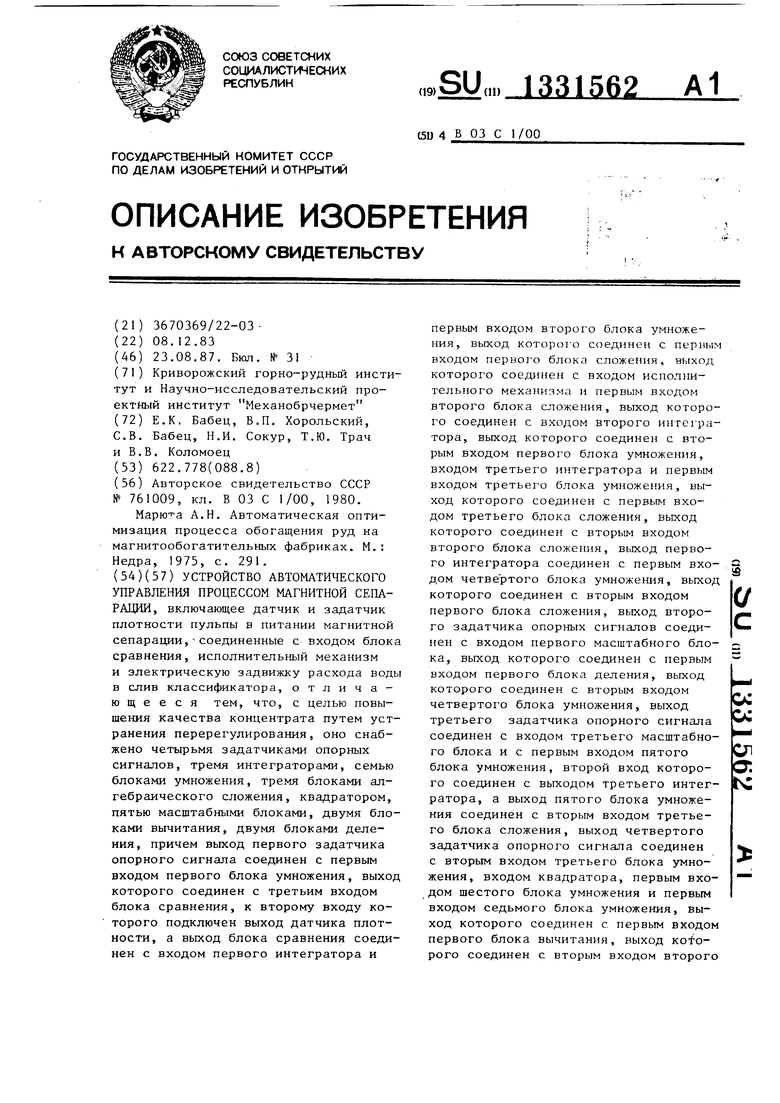
На фиг, 1 показаны переходные процессы плотности пульпы в питании магнитной сепарации по каналу Изменение расхода воды в слив классификатора - Изменение плотности пульпы в питании сепарации при уменьшении расхода воды на 6% от номинального; на фиг, 2 - то же, при увеличении расхода воды на 6%; на фиг, 3 - функциональная блок-схема устройства ав- томатического управления процессом магнитной сепарации,
Устройство содержит датчик 1 плотности пульпы, задатчик 2 плотности, блок 3 сравнения, исполнительный механизм 4, задвижку 5 расхода воды, задатчики 6-9 опорных сигналов,интеграторы 10-12, блоки 13-19 умножения, блоки 20-22 алгебраического сложения квадратор 23, масштабные блоки 24-28 блоки 29 и 30 вычитания, блоки 31 и 32 деления.
Объект управления представлен магнитным сепаратором 33, установленным после классификатора 34,
Датчик 1 плотности пульпы установлен в питании магнитного сепаратора 33, на который подается пульпа со слива классификатора 34, Плотность пульпы в сливе классификатора регулируется исполнительньм механизмом 4 и задвижкой 5, изменяющей расход воды
562
соединен с вторым входом второго блока вычитания и входом четвертого масштабного блока, выход которого соединен с вторым входом седьмого блока умножения, выход шестого блока умножения соединен с входом пятого масштабного блока,выход которого соединен с вторым входомпервого блока вычитания.
в слив классификатора 34. Выход датчика плотности пульпы соединен с отрицательным входом блока 3 сравнения, к положительному входу которого подключен выход .задатчика 2 плотности пульпы.
Выход первого задатчика 6 опорного сигнала соединен с первым входом первого блока 13 умножения, выход которого соединен с третьим (отрицательным) входом блока 3 сравнения, т,е, полярности входов, к которым подключены выходы блоков 1 и 13, совпадают. Выход блока 3 сравнения соединен с входом первого интегратора 10 и первым входом второго блока 14 умножения, выход которого соединен с первым входом первого блока 20 сложения, а выход блока 20 соединен с входами исполнительного механизма 4 и первым входом второго блока 21 сложения.
Выход блока 21 соединен с входом второго интегратора 11, выход которого соединен с вторым входом первого блока 13 умножения, входом третьего интегратора 12 и первым входом третьего блока 15 умножения. Выход блока 15 соединен с первым входом третьего блока 22 сложения, выход которого соединен с вторым входом второго блока 21 сложения, Выход первого интегратора 10 соединен с первым входом четвертого блока 16 умножения, выход которого соединен с вторым входом первого блока 20 сложения.
Выход второго задатчика 7 .опорных сигналов соединен с входом первого масштабного блока 24, выход которого соединен с первым входом первого блока 31 деления и входом второго масштабного блока 25, выход которого соединен с первым входом второго блока 32 деления. Выход блока 32 соединен с вторым входом четвертого блока 16 умножения. Выход третьего за- датчика 8 опорного сигнала соединен с входом третьего масштабного блока 26 и с первым входом пятого блока 17 умножения, второй вход которого соединен с выходом третьего интег- ю ратора 12.
Выход пятого блока 17 умножения со- соединен с вторым входом третьего блока 22 сложения. Выход четвертого эадатчика 9 опорного сигнала соеди- 15 иен с вторым входом третьего блока 15 умножения, входом квадратора 23, первым входом седьмого блока 19 умножения, выход которого соединен с первым входом первого блока 29 вычита- 20 ния. Выход блока 29 соединен с вторым входом второго блока 32 деления.
Выход квадратора 23 соединен с вторым входом шестого блока 18 умножения и первым входом второго блока 30 25 вычитания, вход которого соединен с вторым входом первого блока 31 деления. Выход блока 31 соединен с вторым входом второго блока 14 умножения. Выход третьего масштабного блока 26 30 соединен с вторым входом второго блока 30 вычитания и входом четвертого масштабного блока 27, выход которого соединен с вторым входом седьмого
зированных по такому закону систем управления, их низкую устойчивость и возникновение автоколебаний всего про цесса.
Реальная переходная характеристика объекта, представленная на фиг. 1 и 2, долХна быть аппроксимирована выражением вида
W(p)
К,
К,
Т,р+1
г-р
(2)
где
К, Т.
2 Т. коэффициенты усиления; постоянные времени; С - время запаздывания, Вьфажение (2) путем разложения exp(- t p) в ряд Тейлора сводится к выражению вида
W(P)
-ТР + К
а,Р
+ а,
(3)
1, - динамические параметры процесса, что следует из вида переходных процессов, представленных на фиг. 1 и 2. Параметры К,, К, Т,, Т и ТГ определяются методом Купфмюллера по экспериментально снятой на объекте переходной характеристике и показаны на фиг. 1 и 2.
При аппроксимации передаточной функции по методу Купфмюллера реальная переходная характеристика, изображенная на фиг. 1 и 2, аппроксимируется суммой двух экспонент, вторая из
блока 19 умножения. Выход шестого бло-35 сдвинута на время запаздывания 6. При этом из фиг. 1 следует, что постоянная времени Т, близка к
ка 18 умножения соединен с входом пятого масштабного блока 28, выход которого соединен с вторым входом первого блока 29 вычитания.
Сущность изобретения заключается в следующем.
Обычно в практике автоматизации процессов обогащения переходной процесс в г;итании сепарации при изменении расхода воды в слив классификатора аппроксимируют экспонентой (штриховая линия, фиг. 1 и 2), представляя передаточную функцию объекта в виде
W(p) К(Тр +1) ехр (-ТР), (1)
где К - коэффициент усиления; Т,Т - запаздывание и постоянная
времени.
Для такой аппроксимации переходного процесса и передаточной функции обосновано использование линейных ПИ- и ПИД-регуляторов.
Практика автоматизации показала неудовлетворительное качество синте40
( времени запаздывания с .
Воспользовавшись разложением Б в ряд Тейлора, получаем
{ f
Р
%
45
, . лт-....
Воспользовавшись первыми двумя членами разложения и подставив их в (2), получаем
К|
50
W(p)
Т,Р + 1 (
После преобразования
wfP )iK2
(Т,Р+1)(Т,Р+1)
К2
+ Г)(т;р+Т)
/
1
ТгТ,Р + 7т,+Т)+Т
ISlIz.
55
lilL.
Р -ь
Тг-Т,
)
t
т,т,
зированных по такому закону систем управления, их низкую устойчивость и возникновение автоколебаний всего процесса.
Реальная переходная характеристика объекта, представленная на фиг. 1 и 2, долХна быть аппроксимирована выражением вида
К,
К,
Т,р+1
г-р
(2)
коэффициенты усиления; постоянные времени; время запаздывания, (2) путем разложения Тейлора сводится к вы
-ТР + К
а,Р
+ а,
(3)
1, - динамические параметры процесса, что следует из вида переходных процессов, представленных на фиг. 1 и 2. Параметры К,, К, Т,, Т и ТГ определяются методом Купфмюллера по экспериментально снятой на объекте переходной характеристике и показаны на фиг. 1 и 2.
При аппроксимации передаточной функции по методу Купфмюллера реальная переходная характеристика, изображенная на фиг. 1 и 2, аппроксимируется суммой двух экспонент, вторая из
сдвинута на время запаздывания 6. При этом из фиг. 1 следует, что постоянная времени Т, близка к
( времени запаздывания с .
Воспользовавшись разложением Б в ряд Тейлора, получаем
{ f
Р
%
, . лт-....
Воспользовавшись первыми двумя членами разложения и подставив их в (2), получаем
К|
W(p)
Т,Р + 1 (
После преобразования
wfP )iK2
(Т,Р+1)(Т,Р+1)
К2
+ Г)(т;р+Т)
/
1
ТгТ,Р + 7т,+Т)+Т
ISlIz.
lilL.
Р -ь
Тг-Т,
)
t
т,т,
введя обозначения
Т;
TjT,
К;
,
Т -Т
1 1
получаем вид передаточной функции объекта (3),
Для повышения устойчивости и качества замкнутой системы управления необходимо синтезировать структуру, которая при управлении компенсировал бы неустойчивый числитель передаточной функции объекта вида (3) или (2) и одновременно обладала бы устойчивостью, равной максимальной степени устойчивости системы вида
() . при линейном пи-управлении.
Для выполнения этого вводим в с структуру замкнутой системы управления параллельно объекту динамически фильтр вида
Тр
+ а,
(5)
подав на его вход результирующее управление от системы, а его выход подаем на вход блока сравнения системы управления с ПИ-регулятором.
В этом случае передаточная функция замкнутой системы имеет вид
W(P)
К,
,р2 +а, Р+ККпР+ККп
(6)
где К и К„ - настройки ПИ-регулято- ра.
Для синтеза оптимальной структуры управления объектом (3) необходимо выбрать такие настройки, параметров Kf, и Kj, , чтобы устойчивость системы для объекта (З) совпадала с максималной степенью устойчивости для замк- нутой системы вида (6).
Максимальная степень устойчивости Igi равна крайнему правому корню Р характеристического управления замкW
нутой системы (6), т.е. 1, -Р .
Находим 1 , продифференцировав дважды знаменатель выражения (6) и приравняв его нулю. Тогда
- (7)
23.
3 3 Для того, чтобы качество управления объектом (3) быпо не хуже качества управления объектом (4) или объектом ( 1 ), наслаиваем все корни на
а )
1331562
Р, откуда определяем, что исходные параметры К j, и Кп равны К (За,- а)(ЗК)- (8) 5 Ки (18а,а - 11а)(27кГ , (9) а передаточная функция регулирующей части системы равна
Р
W,(P)
127a,-9a 2Pli8a,a.j+nal ,
27КР
Таким образом, оптимальная структура системы управления синтезирована и включает в себя элементы с передаточными функциями (5) и (10), что соответствует передаточной функции замкнутой системы (6), где параметры
а определяются
первонаТ, К, а,
чально для снятых экспериментально усредненных переходных процессов вида, изображенного на фиг. 1 и 2, а
К определяются выражениями (8)
Кп и
и (9).
Учитывая изложенное, синтезированная система управления может быть записана в виде следующей системы уравнений,
0 5
g
5
рая производные величины ...
Устройство автоматического управления реализует разработанную оптимальную структуру и работает следующим образом.
Блоки взаимодействуют следующим образом.
Измеряют плотность пульпы р в
т
-; датчиком 1 плотности пульпы в пим
тании магнитного сепаратора 33. Измеренный сигнал плотности пульпы преобразуют в аналоговый сигнал электрического напряжения U,.
Задают задатчиком 2 постоянное напряжение задания U, пропорциональное заданному значению плотности
пульпы в питании р jg.
Задают задатчиком 7 постоянное напряжение и , пропорциональное коэффициенту усиления объекта К. Усиливают сигнал и от блока 7 три раза в масштабном блоке 2А, т.е. на выходе
т
ад
13 проблока 24 формируется сигнал U порциональный величине ЗК,
Аналогично блоку 24 в блоке 25 формируют сигнал напряжения Ujc пропорциональный величине 27К, путем усиления сигнала U в девять раз.
Задают задатчиком 8 постоянное напряжение Ug , пропорциональное динамическому параметру а,. Усиливают сигнал Ug от блока 8 в три раза в масштабном блоке 26, т.е. на его выходе формируют сигнал U пропорциональный величине За,.
Аналогично, в блоке 27 формируют
сигнал и
27
пропорциональный 18а
Uo
I
в шесть
путем усиления сигнала и
раз. Задают задатчиком 9 постоянное
напряжение Uq , пропорциональное диJ
Р
учитывая, что операторное выра
намическому параметру а. В квадрато- 20 заменяется умножением на величину ре 23 формируют сигнал V, , пропорциональный величине а..
В блоке 18 умножения перемножают
т.е. формируют пропорциональный величисигналы Uj и Uq
сигнал U|g не а. Усиливают в масштабном блоке I1 сигнал и
т.е. выходной сигнал блока 11 U,, порционапен величине Па.
Умножают в блоке 19 сигналы U
25
18
в одиннадцать раз,
про27
ние постоянной величины равно этой постоянной, покажем верность выраж ния (5) для данного состава и схем соединения блоков 6, 8, 9, 11, 12, 13, 15, 17, 21 и 22. I
Составляем последовательно сист
2Q уравнений, начиная от выхода Х ( (выход блока 13) к входу U(t) (вых блока 20).
и. , т.е. формируют сигнал U,g, пропорциональный величине 18a,a,j. Вычитают в блоке 29 из сигнала сигнал и. , т.е. напряжение выходе пропорционально величине (1 8а;, а2-1 1а
Делят в блоке 32 сигнал И от блока 29 на сигнал U от блока 25, т.е. формируют на выходе блока 32 напряжение , пропорциональное параметру К„, определяемому по выражению (9). Вычитают в блоке 30 из сигформируя напряже
нала сигнал U
ние , пропорциональное величине (За,-а). Делят в блоке 31 сигнал Ujo
на сигнал U , т.е.
формируют сигнал 45
U-|, пропорциональный параметру К г,, определяемому по вьфажению (8).
Работу во взаимодействии блоков 21, 22,11,12,15,17,8,9, 6 и 13 опишем сле- дуюЕЦим образом.50
Данные блоки составляют подсистему динамической фильтрации, входом ко- .торой являете я выходной сигнал U, пропорциональный напряжению ,формируемому в соответствии с (1 1) по выражению 55
t
) K(t)+K,J(t)dt, (12)
О
где (t) определяется по (11).
1562 8
Выходным сигналом динамического фильтра является сигнал U,, с выхода блока 13, пропорциональный параметру g X (t). Взаимосвязь между указанными величинами U(t), X(t), ), X(t), Т, К, К г, и к., задана системой интег
родифференциальньпс уравнений (11) и передаточной функцией фильтра (5).
10 Передаточная функция динамического фильтра W(j)(P) определена выражением (5), которое пропорционально отношению вьфажения выходной величины X (Р) к операторному выражению входной ве15 личины фильтра, т.е. J(p .
Учитывая, что при операторном описании формально время t заменяется на оператор Р, т.е. U(t) записывается как и(Р), а также, что интегрирование
J
Р
учитывая, что операторное выражезаменяется умножением на величину
25
)з5
ние постоянной величины равно этой постоянной, покажем верность выражения (5) для данного состава и схемы соединения блоков 6, 8, 9, 11, 12, 13, 15, 17, 21 и 22. I
Составляем последовательно систему
2Q уравнений, начиная от выхода Х (t) (выход блока 13) к входу U(t) (выход блока 20).
В соответствии с фиг. 3
и„(Р) U6(P) U,, (Р) и„(Р) Т, так как U(P)T(P) Т const;
и„(Р) U,,(P)-i ;
г
и,,(Р) и,о(Р) - ); (13)
U2o(P) U(P);
U,,(P) U,5(P) + U,,(P);
U,5(P) U,,(P)-U,(P) U,,(P),. a
так какUg(P) a(P) a const;
и„(Р) U,,,(P).Ug(P) U,2(P).a,,
так какUg(P) a,(P) a, const;
J,i(P) U,,(P).
Последовательно подставляем значения сигналов из системы уравнений, в первое уравнение
(Р)
и,(р) и„(р) Т
U2,(P) 5
(14)
откуда U2,(P) PU,,(P)
(15)
и„(Р) U(P) - U,,(P) U(P) - U,f(P) - U,,(P) U(P) - ,,(P) -U,,(P)- a, U(P) - ,,(P) - U,,(P)
(16)
91331
Приравняв (15) и (16), получаем
Ри,ДР) и(Р) -а(и,(Р) - - |- и„(Р)),(17) 5
откуда
и (Р) У()- . ,
Учитывая, что X (Р) U,|(P)T, получаем
ТР
(18)
х(Р) и(р) рт;-;р -; .
HJUI по определению
,, (Р) - ЫП -Тр
т и(Р) Р +агР+а т.е. выражение (5) описывает функци- оиирои указанных блоков, состав- ллю. , и нямический фильтр.
T. UxUM образом, при появлении на выходе блока 20 сигнала управления IKt) на выходе блока 13 формируется . X(t).
В блоке 1 сравнения определяют величину рассогласования (t) по выра- жению (j)
fc(ty X(t) - X(t) - (t) )iyTf г ычитапия из сигнала U сигналов и, и и,. Умножают сигнал Ь в блоке 1А на сигнал , т.е. выход1ГОЙ сигнал и,4 блока 14 пропорционале величине (t). Интегрируют в блоке 10 U, и умножают его в блоке 16 на сигнал U-j , т.е. на выходе блока 16 формируют сигнал, пропорциональный величине (t)dt.
Сигн. шы и, и и,, складываются в блоке 20, т.е. на его выходе формиру iOT сигнал Ujo , пропорциональный ll(t) по выра:кению (12). Сигнал управления и (-t) поступает на вход динамического |1ильтра, т.е. на блок 21 арифметического сложения для формирования сигнала X(p(t) на выходе блока 13, а также на исполнительный механизм 4.
Исполнительный механизм 4 изменяет положение задвижки 5, изменяющей расход воды в сливе классификатора 34.
Сигнал текущей плотности пульпы в питании магнитного сепаратора от датчика 1 поступает на блок 3 сравнения где вначале складьшается с сигналом от первого блока 13 умножения, а затем сравнивается с заданным знамени- ем плотности от блока 2. Величина рассогласования с выхода блока 3 поступает на блок 14 и через интегратор 10 на блок 16.
5
5
0
5
0 g
Q
56210
В блоках 14 и 16 сигнал рассогласования умножается на сигналы с блоков 31 и 32 деления соответственно и затем суммируются в блоке 20 сложения. С блоков 31 и 32 деления поступают сигналы равные (8) и (9) соответственно, а сформированный блоком 20 сложения сигнал определяется выражением (10). Он поступает на исполнительный механизм 4 задвижки 5, оптимальным образом изменяя расход воды в сливе классификатора, не допуская возникновения аварийных колебаний, стабилизируя плотность пульпы в питании сепаратора.
Одновременно с этим сигнал управления с выхода блока 20 сложения поступает на блок 21 сложения, где алгебраически складывается с сигналом от блока 22 сложения со знаком минус. Сигнал на выходе блока 22 сформирован блоками 11, 12, 8, 9, 15, 17 и 22 таким образом, чтобы сигнал после второго интегратора 11, умноженный в блоке 13 умножения на величину параметра Т, задаваемую задатчиком 6, бьш равен (5). Величины а, и а задаются задатчиками В и 9 опорных сиг- }1алов.
Заданное значение параметра К, заданное задатчиком 7, поступает последовательно на масштабирующие блоки 24 и 25 с коэффициентами масштабирования 3 и 9 соответственно.
Заданное значение параметра а поступает на квадратор, с выхода которого сигнал равный а поступает на блок 18 умножения, в котором умножается на величину а,, от задатчика 9.
т
Сигнал с выхода блока 18, равньш ai, поступает на масштабирующий блок 28 с коэффициентом масштабирования рав- Hbw 11. Сигнал величиной а от задатчика 8 поступает последовательно на масштабные блоки 26 и 27 с коэффициентами масштабирования 3 и 6 соответственно, а в блоке умножения 19 сигнал, равный 18 а,, умножается на величину а2 от задатчика 9.
В блоке 29 вычитания определяется числитель выражения (9), котррый в блоке 32 деления делится на величину 27К от блока 25. Сформированный по выражению (9) сигнал поступает на блок 16. Аналогичным образом определяется по выражению (8) сигнал, поступающий с выхода бпока 3 деления на блок IА умножения.
Таким образом, устройство управля ВТ расходом воды в сливе классификатора и всем процессом обогащения в целом, не допуская аварийных колебаний содержания готового продукта в питании, промпродукте и хвостах магнитного сепаратора. Дисперсия колебаний грансостава снижается на 253156212
30%, повышается общая производительность цикла по готовому продукту. Управление процессом магнитной g сепарации с помощью предлагаемого устройства обеспечивает повьппение производительности на 0,4%, повышение содержания полезного компонента-в в продукте на 0,1% при одновременном 10 снижении содержания полезного компонента в хвостах на 0,25%.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической стабилизации плотности пульпы в сливе классификатора при мокром процессе измельчения | 1984 |
|
SU1260022A1 |
| Система автоматической стабилизации плотности пульпы в слив классификатора при мокром процессе измельчения | 1982 |
|
SU1065021A1 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
| Самонастраивающаяся система автоматического управления процессом мокрого измельчения | 1981 |
|
SU1018106A1 |
| Система автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491579A1 |
| Система адаптивного управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1480878A1 |
| Система автоматического управления циклом измельчения | 1983 |
|
SU1357072A1 |
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491580A1 |
| Адаптивный регулятор | 1982 |
|
SU1076873A1 |
| Адаптивный регулятор | 1987 |
|
SU1432459A1 |
Pj/M
1315 1550 1325 1300
120
Тг
-
т 2 300 360 t,c
9lt2.1
msec 120 180 300 360 t,c
9иг.1
На к/1ассафака1щю
Но. обогащение
9иг
| Авторское свидетельство СССР № 761009, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Марюта А.Н | |||
| Автоматическая оптимизация процесса обогащения руд на магнитообогатительных фабриках | |||
| М.: Недра, 1975, с | |||
| СТЕРЕООЧКИ | 1920 |
|
SU291A1 |
