Предполагаемое изобретение относится к области грузозахватных приспособлений грузоподъемных машин и может быть использовано в практике по зачистке элементов железнодорожных путей от дикорастущей растительности, например, железнодорожными кранами.
Известны грузоподъемные магниты. Так в книге А.Г.Меклер “Электрооборудование подъемно-транспортных машин”. - М.: Машиностроение, 1965, с.306-311, описана конструкция грузоподъемного электромагнита, а на фиг.100 показан его общий вид с разрезом. Такой грузоподъемный электромагнит состоит из стального корпуса круглой формы с центральным сквозным отверстием. Внутри корпуса размещена катушка электромагнита, которая подключается к источнику тока, например, железнодорожного крана. На верхней части корпуса закреплены кронштейны, с помощью которых грузоподъемный магнит присоединен к крюковой подвеске крана через отрезки цепей и звена навешиваемого на крюк. Недостатком описанного грузоподъемного электромагнита является его узкая специализация, то есть он может быть использован только на грузовых операциях по переработке стальных и чугунных изделий. В остальных же случаях переработке различных грузов применять его невозможно. Так как стоимость его относительно велика, то простои такого грузозахватного органа существенно скажутся на себестоимости грузовых операций.
Известен также грузоподъемный магнит модели М-42Б, показанный и описанный в книге “Грузозахваточные устройства″. Справочник. Козлов Ю.Т. и др. - М.: Транспорт, 1980, с. 53-55, рис. 47. Конструкция такого грузоподъемного электромагнита аналогична вышеописанной и поэтому недостатки их подобны.
Целью предполагаемого изобретения является расширение эксплуатационных возможностей такого грузозахватного устройства, в частности, использование его в качестве косилки при удалении дикорастущей растительности, произрастающей в весенне-летний период на насыпи и других элементах железнодорожного пути.
Поставленная цель достигается тем, что в центральном сквозном отверстии корпуса установлен короткозамкнутый ротор, нижняя часть его жестко соединена с диском, взаимосвязанным через тела качения с корпусом, а верхняя также через упорный подшипник с ним же, а сам диск снабжен радиально расположенными канатами цилиндрической формы, в которых с зазором, с возможностью возвратно-поступательного движения размещены гибкие элементы, например, отрезки стальных канатов, одни из концов которых с помощью пружин растяжения закреплены на диске, а другие утоплены во внутрь упомянутых радиально расположенных канатов, причем катушки электромагнитов имеют возможность подключения к источнику тока как последовательно, так и по схеме "звезда".
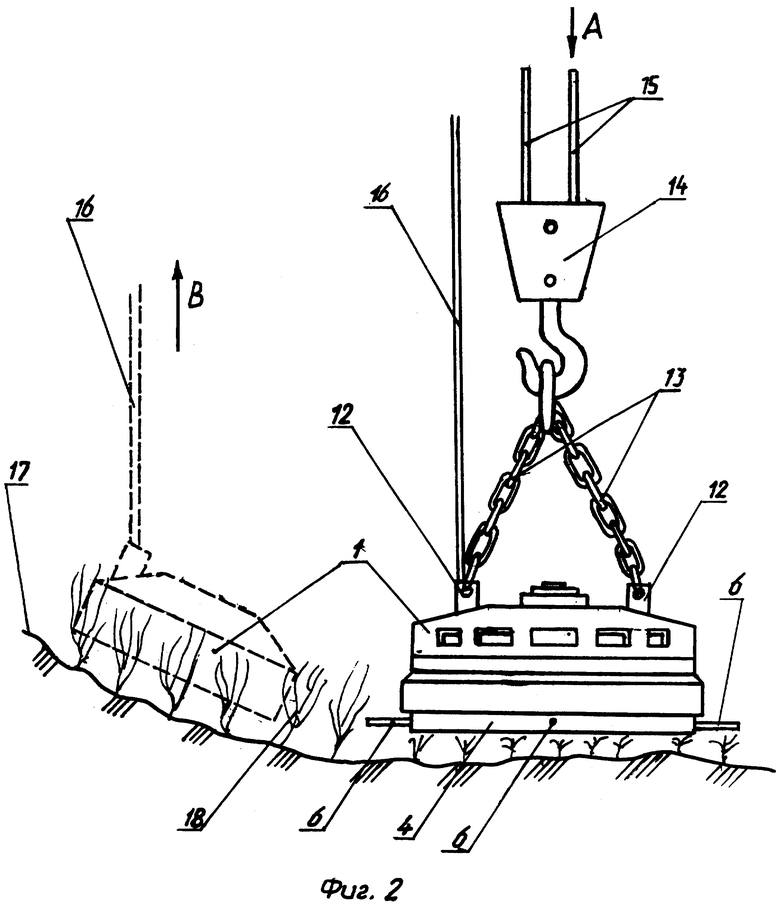
На фиг.1 показан общий вид грузоподъемного магнита с разрезом, а на фиг.2 - схема его пространственного положения в рабочем состоянии.
Грузоподъемный магнит состоит из стального корпуса 1, внутри которого отверстие 2, а в нем с возможностью вращения расположен короткозамкнутый ротор 3. В нижней своей части короткозамкнутый ротор 3 жестко соединен с диском 4, снабженным радиальными каналами 5, а в них подвижно размещены отрезки стальных канатов 6, концы которых присоединены к пружинам растяжения 7, закрепленным на диске 4. Диск 4 контактирует со стальным корпусом 1 при помощи тел качения 8. В верхней своей части короткозамкнутый ротор 3 снабжен упорным подшипником 9, который уперт в стальной корпус 1, и поджат к нему гайкой 10. Внутри стального корпуса 1 расположены катушки электромагнита 11, а на поверхности его расположены кронштейны 12, с помощью которых грузоподъемный магнит цепями 13 присоединен к крюковой подвеске 14 крана. Крюковая подвеска 14 снабжена стальными канатами 15 управляемой грузовой лебедки крана (не показана). К корпусу 1 также присоединен стальной канат 16 управляемой грейферной лебедки 9 (эта лебедка также не показана). Грузоподъемный магнит расположен относительно насыпи 17, на которой произрастает дикорастущая растительность 18.
Работает грузоподъемный магнит следующим образом. Железнодорожный кран (не показан) подгоняют к месту, где необходимо удалить дикорастущую растительность 18 (это различные сорные травы и растения) и перемещают по стрелке А стальные канаты 15 с помощью грузовой лебедки (не показана) так как это широко используется в практике эксплуатации железнодорожных кранов. Это способствует движению крюковой подвески 14 в этом же направлении до тех пор, пока диск 4 не окажется на расстоянии от профиля насыпи 17 на 20-50 см. При этом также с помощью грейферной лебедки (эта лебедка также не показана) опускают по стрелке А и стальной канат 16. Затем широко известным способом переключают катушки электромагнита 11 на схему "звезда" и подают питание (кабель и приборы переключения катушек не показаны) на последние. Под действием вращающегося магнитного поля катушек 11 ротор 3 получает вращение и под действием упорядоченной силы  отрезки стальных канатов 6, растягивая пружины растяжения 7, выходят из радиальных канатов 5 диска 4 и занимают положение как это показано на фиг.2. Так как частота вращения диска 4 значительна (она может быть установлена порядка синхронной в 3000 мин-1), то отрезки стальных канатов 6 (их количество может быть выбрано от 4 до 8 и более, в зависимости от диаметра диска 4) взаимодействуют со стеблями дикорастущей растительности 18 и срезают последние. В случае изменения профиля насыпи 17 канат 16 перемещают по стрелке В, а канаты 15 - в направлении, противоположном стрелке А, так, что грузоподъемный магнит может занимать любое положение относительно обрабатываемой поверхности насыпи 17, например так, как это показано пунктиром на фиг.2. Маневрируя механизмом передвижения крана, механизмом подъема стрелы, а также грузовой и грейферной лебедками (см. например кинематическую схему крана КДЭ-151, представленную на рис. 135, стр. 304 книги В.И.Лужичков и В.А.Редников. Грузоподъемные краны на железнодорожном ходу. Изд. 2ое доп. и пер. М.: Транспорт, 1964), можно обрабатывать диском 4 и отрезками стальных канатов 6 любые профили элементов железнодорожного пути. Закончив обработку участка пути, подачу напряжения к катушкам 11 прекращают и диск 4 останавливается, при этом под действием пружины растяжения 7 отрезки стальных тросов 6 перемещаются в направлении, противоположном стрелкам F, и они занимают положение как это показано на фиг.1. Если переключить катушки 11 на схему их последовательного соединения, то грузовой магнит может быть использован на грузовых операциях с переработкой изделий из стали, чугуна, металлической стружки и так далее. В этом случае проворот диска 4 исключен, так как наличие магнитного поля, создаваемого катушкой 11, вызовет мощные силы притяжения, возникающие по стрелкам С между корпусом 1 и поверхностью диска 4. Далее, в зависимости от характера описанных, работ процессы могут многократно повторяться.
отрезки стальных канатов 6, растягивая пружины растяжения 7, выходят из радиальных канатов 5 диска 4 и занимают положение как это показано на фиг.2. Так как частота вращения диска 4 значительна (она может быть установлена порядка синхронной в 3000 мин-1), то отрезки стальных канатов 6 (их количество может быть выбрано от 4 до 8 и более, в зависимости от диаметра диска 4) взаимодействуют со стеблями дикорастущей растительности 18 и срезают последние. В случае изменения профиля насыпи 17 канат 16 перемещают по стрелке В, а канаты 15 - в направлении, противоположном стрелке А, так, что грузоподъемный магнит может занимать любое положение относительно обрабатываемой поверхности насыпи 17, например так, как это показано пунктиром на фиг.2. Маневрируя механизмом передвижения крана, механизмом подъема стрелы, а также грузовой и грейферной лебедками (см. например кинематическую схему крана КДЭ-151, представленную на рис. 135, стр. 304 книги В.И.Лужичков и В.А.Редников. Грузоподъемные краны на железнодорожном ходу. Изд. 2ое доп. и пер. М.: Транспорт, 1964), можно обрабатывать диском 4 и отрезками стальных канатов 6 любые профили элементов железнодорожного пути. Закончив обработку участка пути, подачу напряжения к катушкам 11 прекращают и диск 4 останавливается, при этом под действием пружины растяжения 7 отрезки стальных тросов 6 перемещаются в направлении, противоположном стрелкам F, и они занимают положение как это показано на фиг.1. Если переключить катушки 11 на схему их последовательного соединения, то грузовой магнит может быть использован на грузовых операциях с переработкой изделий из стали, чугуна, металлической стружки и так далее. В этом случае проворот диска 4 исключен, так как наличие магнитного поля, создаваемого катушкой 11, вызовет мощные силы притяжения, возникающие по стрелкам С между корпусом 1 и поверхностью диска 4. Далее, в зависимости от характера описанных, работ процессы могут многократно повторяться.
Технико-экономическое преимущество предложенного технического решения в сравнении с известными очевидна, так как он повышает универсальность использования грузовых электромагнитов не только на грузовых операциях по переработке изделий из черных металлов, но и на операциях по содержанию элементов железнодорожных путей в условиях эксплуатации их, в частности по удалению дикорастущей растительности, произрастающей на насыпях. Все это позволит в итоге снизить себестоимость производства грузовых работ при эксплуатации кранов на железнодорожном ходу. В настоящее время в ЕГУ совместно с Елецким отделением Юго-Восточной железной дороги на хоздоговорной основе проводится НИР, связанная с разработкой вышеописанного устройства и в июле-августе 2003 года планируется его изготовление и испытание в эксплуатационных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРУГЛЫЙ ГРУЗОПОДЪЕМНЫЙ ЭЛЕКТРОМАГНИТ | 2003 |
|
RU2243142C1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН НА ЖЕЛЕЗНОДОРОЖНОМ ХОДУ | 2003 |
|
RU2243145C1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| Грузозахватное устройство | 1973 |
|
SU484160A1 |
| Устройство для перепасовки грузозахватных органов плавучего крана | 1982 |
|
SU1118602A1 |
| Устройство для соединения грузозахватных органов с канатами грузоподъемной машины | 1984 |
|
SU1203002A1 |
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ НАВАЛОЧНЫХ ГРУЗОВ ИЗ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2000 |
|
RU2184069C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| ОГРАНИЧИТЕЛЬ ВЫСОТЫ ПОДЪЕМА ГРУЗОЗАХВАТНОГО УСТРОЙСТВА ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2401793C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 2002 |
|
RU2209761C1 |
Изобретение относится к области грузоподъемных машин. Грузоподъемный электромагнит состоит из стального корпуса круглой формы с центральным сквозным отверстием и катушек электромагнита, последовательно подключенных к источнику переменного тока, и грузоподъемной машины. Согласно изобретению, в центральном сквозном отверстии корпуса установлен короткозамкнутый ротор, нижняя часть которого жестко соединена с диском, взаимосвязанным через тела качения с корпусом, а верхняя часть через упорный подшипник соединена с корпусом. Диск снабжен радиально расположенными каналами цилиндрической формы, в которых с зазором, с возможностью возвратно-поступательного движения размещены гибкие элементы, например отрезки стальных канатов, одни из концов которых с помощью пружины растяжения закреплены на диске, а другие утоплены внутрь упомянутых выше радиально расположенных каналов. Катушки электромагнита имеют возможность подключения к источнику тока как последовательно, так и по схеме “звезда”. Технический результат заключается в расширении эксплуатационных возможностей грузозахватного устройства. 2 ил.

Грузоподъемный электромагнит, состоящий из стального корпуса круглой формы с центральным сквозным отверстием и катушек электромагнита, последовательно подключенных к источнику переменного тока, и грузоподъемной машины, отличающийся тем, что в центральном сквозном отверстии корпуса установлен короткозамкнутый ротор, нижняя часть которого жестко соединена с диском, взаимосвязанным через тела качения с корпусом, а верхняя часть через упорный подшипник соединена с корпусом, диск снабжен радиально расположенными каналами цилиндрической формы, в которых с зазором, с возможностью возвратно-поступательного движения размещены гибкие элементы, например отрезки стальных канатов, одни из концов которых с помощью пружины растяжения закреплены на диске, а другие утоплены внутрь упомянутых выше радиально расположенных каналов, причем катушки электромагнита имеют возможность подключения к источнику тока как последовательно, так и по схеме “звезда”.
| Грузоподъемный электромагнит | 1979 |
|
SU814839A1 |
| Электромагнитный захват | 1978 |
|
SU742336A1 |
| Грузоподъемный электромагнит | 1987 |
|
SU1449506A1 |
| DE 29921479 U, 08.02.2001. | |||

