Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для считывания с и/или записи на оптический носитель записи, причем в этом следящем устройстве, предназначенном для отслеживания дорожки записи, используется способ дифференциального детектирования фазы ДДФ (DPD), и с этой целью в нем содержатся элементы с переменной задержкой.
Уровень техники
Устройство такого типа описано в американском патенте US-A-4785441. В этом известном устройстве ошибки в сигнале отслеживания, вызванные наклоном оптического носителя записи или различной глубиной ямок на его поверхности, компенсируются различным временем задержки элементов с изменяемым временем задержки, которое регулируется во время работы устройства на основе сравнения фазы.
Известным устройствам свойственны недостатки, состоящие в том, что хотя ошибки, вызванные наклоном оптического носителя записи или различной глубиной ямок оптического носителя записи, могут быть компенсированы относительно хорошо, способ определения ошибки, вызванной смещением линзы, не является оптимальным. Это вызвано тем, что накладываются компоненты ошибки, вызванные другими источниками, например из-за изменений свойств компонентов в процессе старения или условий окружающей среды. В результате компенсация ошибки, несомненно, выполняется не оптимальным способом.
Сущность изобретения
Задачей настоящего изобретения является устройство, в котором выполняется наилучшая возможная компенсация ошибки в сигнале ошибки отслеживания дорожки и, таким образом, в сигнале отслеживания, причем указанная ошибка вызвана перемещением линзы.
В соответствии с настоящим изобретением эта задача решается с помощью способа, включающего признаки, описанные в пункте 1 формулы изобретения. При этом часть элементов с переменной задержкой устанавливается между четырехквадрантным детектором и точкой суммирования, причем они выполнены в виде аналоговых элементов задержки.
Другая часть элементов с переменной задержкой разработана в цифровом виде и они установлены между точкой суммирования и фазовым компаратором. Такое устройство, в соответствии с настоящим изобретением, имеет то преимущество, что смещение в сигнале ошибки отслеживания дорожки, вызванное перемещением линзы, оптимально компенсируется с помощью элементов аналоговой задержки. Информация как о фазе, так и об амплитуде соответствующего аналогового сигнала сохраняется даже после задержки элементами аналоговой задержки и доступна в точке суммирования. С другой стороны, после суммирования критичной остается только информация о фазе. В этом случае, в соответствии с настоящим изобретением, компенсация других факторов, влияющих на смещение, выполняется с помощью элементов цифровой задержки. Преимущество такой схемы состоит в том, что элементы цифровой задержки могут быть более просто реализованы, так как они задерживают на определенный период времени только фронты входных сигналов. Более того, затраты на изготовление элементов задержки, выполненных в аналоговой форме, сокращаются, так как требуемый диапазон их настройки может быть ограничен. Как было доказано, теоретическая возможность реализации всех элементов задержки в цифровой форме является менее приемлемой на практике, поскольку как временное положение сигналов по отношению друг к другу, так и их амплитуда являются важными факторами, учитываемыми до точки суммирования. Было показано на практике, что как амплитуда, так и временное изменение четырех сигналов детектора могут изменяться в случае смещения линзы объектива от оптической оси. Компенсация компонента смещения сигнала ошибки отслеживания дорожки, которое зависит от перемещения линзы, в соответствии с настоящим изобретением, может быть выполнена оптимально, если до суммирования и преобразования в цифровую форму присутствуют обе измеряемые переменные. Информация по амплитуде, однако, теряется, если перед суммированием будет произведено преобразование в цифровую форму. В этом случае компенсацию перемещения линзы будет больше невозможно выполнить оптимальным способом. Установка элементов с переменной задержкой до и после точки суммирования делает это возможным, кроме того, это позволяет не только компенсировать ошибку, вызванную отклонением линзы, но также компенсировать и смещение в сигнале ошибки отслеживания дорожки. Также становится возможной адаптация, например, к нежелательным задержкам, вызванным допусками компонентов или аналогичными мешающими воздействиями.
В соответствии с предпочтительным вариантом воплощения устройства, устройство управления имеет устройство определения смещения, на входе которого присутствует выходной сигнал фазового компаратора, и выходной сигнал которого служит для установки элементов с переменной задержкой. Преимущество такой схемы состоит в том, что смещение, которое может присутствовать в сигнале ошибки отслеживания дорожки, точно также компенсируется установкой времени задержки элементов задержки. При этом важным моментом является то, что сигнал ошибки отслеживания дорожки с этой целью интегрируется, а пары элементов детектора, для которых требуется ввести задержку, а также величина требуемой задержки определяются по знаку и абсолютной величине выходного сигнала интегратора.
В предпочтительном варианте воплощения два устройства компенсации ошибки - смещения и ошибок, вызванных отклонением линзы, комбинируются вместе с тем, чтобы было возможно выработать сигнал ошибки отслеживания дорожки, который, насколько это возможно, был бы свободен от всех ошибок.
Схема, разработанная в соответствии с настоящим изобретением, в которой, по меньшей мере, один из элементов задержки расположен между точкой суммирования выходных сигналов элементов четырехквадрантного детектора и фазовым компаратором, имеет то преимущество, что компенсация смещения выполняется элементами задержки, которые независимы от компенсации перемещения линзы. В этом случае настоящее изобретение направлено как на решения с использованием двух элементов с переменной задержкой и простым устройством переключения, так и на решение, использующее простой элемент задержки и несколько более сложное переключающее устройство. Это имеет то преимущество, что, в зависимости от заданных пограничных условий, становится возможным реализовать наиболее предпочтительную в каждом случае версию с точки зрения затрат или с точки зрения сложности производства. В целом, решения, использующие малое количество элементов задержки, являются здесь предпочтительными, так как они занимают малую площадь на поверхности микросхемы в случае реализации устройства в виде интегральной схемы.
Возможность осуществления управления с использованием только двух аналоговых элементов с переменной задержкой обусловлена в соответствии с настоящим изобретением тем, что состоит в соединении указанных элементов задержки с помощью устройства переключения в каждом случае к элементам детектора, сигналы которых должны быть задержаны. Это имеет то преимущество, что в этом случае количество элементов задержки также уменьшается.
В соответствии с настоящим изобретением искусственный интерференционный сигнал подается на следящее устройство, причем сигнал ошибки отслеживания дорожки, полученный в результате этого, сравнивается с интерференционным сигналом, и результат подается на устройство управления. Это имеет то преимущество, что ошибки в сигнале ошибки отслеживания дорожки, которые вызваны отклонением линзы, могут быть оптимально компенсированы. Устройство, вырабатывающее интерференционный сигнал, воздействует на отклонение линзы и, таким образом, на ошибку в сигнале ошибки отслеживания дорожки - выходной сигнал фазового компаратора. Эта ошибка не компенсируется до тех пор, пока регулирующая схема отслеживания дорожки не будет закрыта. Таким образом, ошибка, вызванная отклонением линзы, первоначально проявляется без какой-либо компенсации в сигнале ошибки отслеживания дорожки. С помощью устройства управления сравниваются интерференционный сигнал и сигнал ошибки отслеживания дорожки, и по результату этого сравнения устанавливаются на оптимальное значение величины времени задержки элементов с переменной задержкой. Это означает, что после установки интерференционный сигнал больше не будет иметь какого-либо остаточного влияния или оно будет проявляться в сигнале ошибки отслеживания дорожки в незначительной степени.
Устройство управления предпочтительно имеет устройство сравнения, на входах которого присутствуют выходные сигналы фазового компаратора и выходной сигнал устройства вырабатывания интерференционного сигнала, при этом выходной сигнал устройства сравнения используется для установки элементов с переменной задержкой. Это имеет то преимущество, что устройство сравнения позволяет получить как сигнал направления, который определяет, должна ли быть установлена положительная или отрицательная задержка, или сигнал какой из пар элементов детектора должен быть задержан, и абсолютную величину сигнала, которая задает величину требуемой задержки. Устройство сравнения предпочтительно содержит синхронный демодулятор.
Кроме того, в соответствии с настоящим изобретением, выходной сигнал устройства управления должен быть разложен на абсолютную величину и знак с помощью блока схемы. Это дает то преимущество, что, например, сигнал знака может использоваться непосредственно для управления переключающим устройством, которое при этом получает квазицифровой сигнал управления с определенной амплитудой. Вследствие этого также, например, определение знака для элементов задержки считается не обязательным.
В соответствии с настоящим изобретением, компаратор, который ниже также упоминается как преобразователь, включен в схему до элемента или элементов цифровой задержки. Указанный компаратор преобразует поступающий на его вход аналоговый сигнал, который определяется только в широких пределах в смысле точки перехода через ноль и амплитуды, в выходной сигнал, в котором предполагаются только два состояния, и который имеет относительно резко определенные переходы между этими состояниями. В этом случае величина сравнения компаратора может принимать заранее заданную величину или может отслеживаться адаптивно. Сигнал, преобразованный в цифровой вид, особенно хорошо может быть обработан с помощью элементов цифровой задержки. Преобразователь также часто называют "двусторонний ограничитель".
Преимуществом настоящего изобретения является то, что элементы задержки и устройство управления могут быть реализованы в виде интегральной схемы. Одним преимуществом устройства в соответствии с настоящим изобретением является то, что возможны недорогие варианты реализации в случае его выполнения в виде интегральной схемы, так как элементы цифровой задержки занимают относительно небольшую площадь микросхемы, и, следовательно, возможно достижение низкой стоимости. Дополнительное преимущество состоит в том, что используемые элементы задержки являются относительно малыми и в меньшей степени зависящими от допусков при производстве интегральной схемы.
При этом следует понимать, что настоящее изобретение не ограничено конкретно указанными примерами воплощения и альтернативными вариантами, а скорее включает все возможные варианты развития, которые могут быть выполнены специалистами в данной области. Другие преимущества, а также усовершенствования настоящего изобретения будут очевидны из нижеследующего описания вариантов воплощения со ссылкой на чертежи.
Перечень фигур чертежей
На фигуре 1 изображен пример воплощения устройства в соответствии с настоящим изобретением,
На фигуре 2 изображено устройство, в котором используется способ отслеживания ДДФ (DPD),
На фигуре 3 изображено взаимоотношение фаз отдельных сигналов детектора в случае применения способа отслеживания ДДФ (DPD),
На фигуре 4 изображена блок-схема последовательности выполнения способа в соответствии с настоящим изобретением,
На фигуре 5 изображена логическая схема управления устройства в соответствии с настоящим изобретением,
На фигуре 6 изображены диаграммы сигнала, относящиеся к способу в соответствии настоящим изобретением,
На фигуре 7 изображен один из вариантов воплощения устройства управления,
На фигуре 8 изображена часть устройства в соответствии с настоящим изобретением в другом варианте воплощения с одним элементом переменной задержки для регулировки смещения,
На фигуре 9 изображена часть устройства в соответствии с настоящим изобретением в еще одном варианте его воплощения с множеством элементов переменной задержки,
На фигуре 10 изображены сигналы элементов от А до D детектора, а также сигналы суммирования без отклонения линзы объектива,
На фигуре 11 изображены сигналы элементов от А до D детектора, а также сигналы суммирования при отклонении линзы объектива,
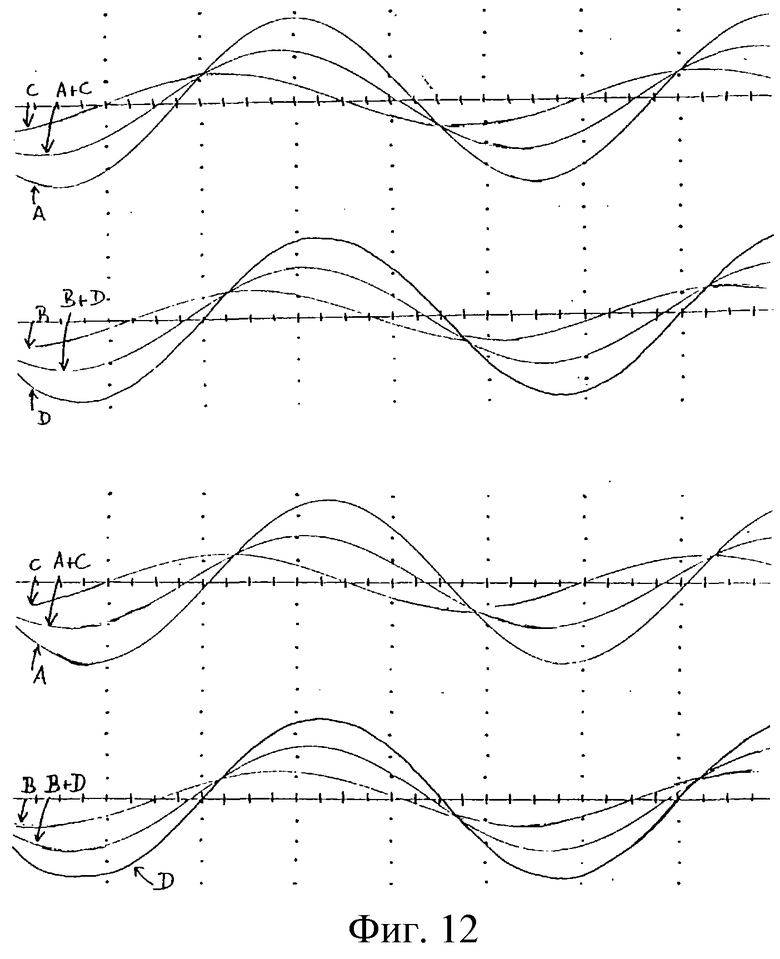
На фигуре 12 изображены сигналы элементов от А до D детектора, а также сигналы суммирования при отклонении линзы объектива.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.1 изображено устройство в соответствии с настоящим изобретением. Следящее устройство 13 изображено с левой стороны, линза 3 объектива и привод 6 верньера относятся к указанному следящему устройству. Привод 6 верньера управляется регулятором 17 отслеживания, на входе которого присутствует сигнал ошибки отслеживания дорожки ДДФ-ОД (DPD-TE), получаемый на выходе фазового детектора 14. С другой стороны, интерференционный сигнал S прикладывается к приводу 6 верньера с помощью устройства 22 генерирования интерференционного сигнала. Интерференционный сигнал S сдвигают по фазе с помощью фазосдвигающего устройства 23, в результате чего формируется сигнал WSY, который подается на устройство 24 управления. Устройство 24 управления оценивает сигнал WSY и сигнал ошибки отслеживания дорожки ДДФ-ОД (DPD-TE) и устанавливает через устройства 25, 37 переключения величины τS, τT, τX и τY времени задержки элементов 26S, 26Т, 26Х, 26Y с переменной задержкой. Элементы 26Х, 26Y с переменной аналоговой задержкой задерживают выходные сигналы элементов А и B и, соответственно, С и D четырехквадрантного детектора 5 с помощью соответственно установленных величин τX, τY времени задержки. Сигналы элементов А и С детектора, один из которых задержан, суммируются в первой точке 15 суммирования и передаются на фазовый детектор 14. То же самое относится соответственно к точке 16 суммирования и сигналам элементов В и D детектора, один из которых аналогично задерживается.
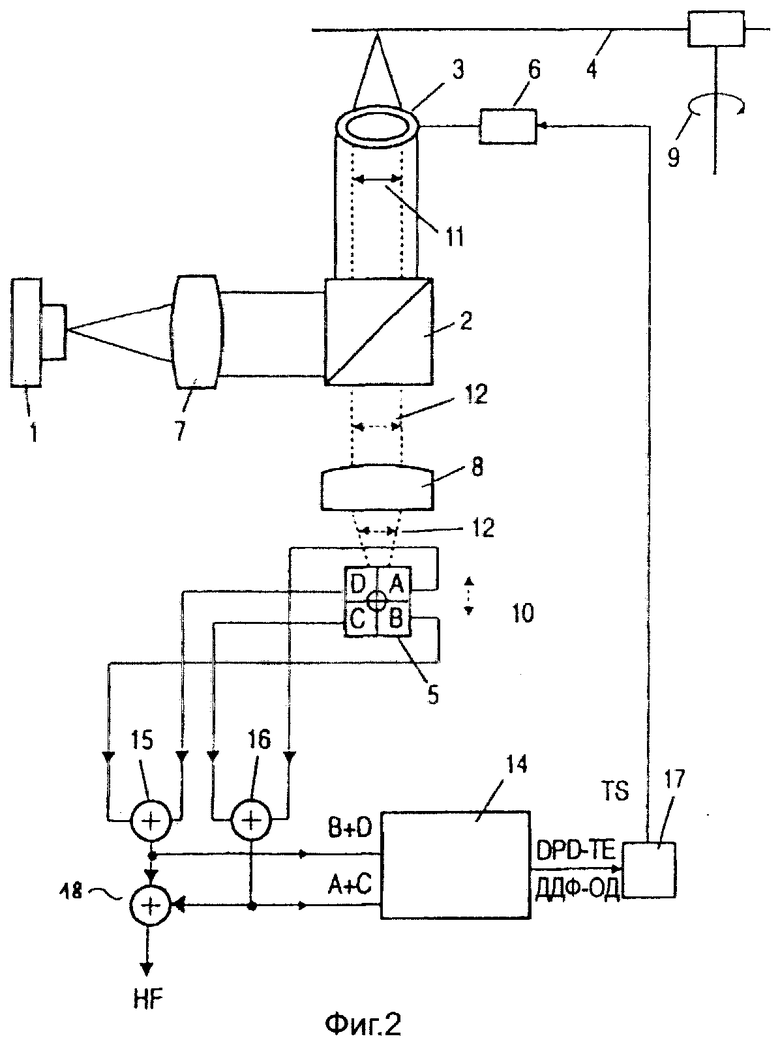
Способ отслеживания ДДФ (DPD) будет теперь пояснен со ссылкой на фиг.2. На фиг.2 изображено в виде схемы известное устройство, в котором используется способ ДДФ (DPD) отслеживания. Источник света 1 вырабатывает луч света, который фокусируется на оптическом носителе 4 записи с помощью полупрозрачного зеркала 2, которое изображено как часть поляризующего устройства расщепления луча, и линзы 3 объектива. Луч света отражается от указанного оптического носителя записи и направляется на четырехквадрантный детектор 5. Четырехквадрантный детектор 5 изображен с поворотом на угол 90°, то есть в виде сверху, и содержит четыре элемента А, В, С и D детектора. Стрелка 10 указывает направление дорожки, то есть направление, в котором носитель 4 записи передвигается по отношению к четырехквадрантному детектору 5. Четырехквадрантный детектор 5 может, таким образом, быть разделен на две области детектора, которые расположены продольно по отношению к направлению дорожки и содержат элементы А и В детектора, с одной стороны, а также С и D - с другой стороны.
Между источником 1 света и зеркалом 2 установлен коллиматор 7, а выпуклая линза 8 установлена между зеркалом 2 и четырехквадрантным детектором 5. Драйвер 6 верньера движет линзу 3 объектива в радиальном направлении по отношению к оптическому носителю 4 записи в соответствии с сигналом TS включения привода верньера. Линза 3 объектива и привод 6 верньера являются частью следящего устройства 13. Носитель 4 записи выполнен в виде диска, что соответствует, например, звуковому компакт-диску (CD), видеодиску, носителю информации, имеющему высокую плотность записи (DVD) и тому подобным. Оптический носитель 4 записи вращается с помощью дисковода 9 (изображен здесь только схематически). Изображено сечение носителя 4 записи вдоль его диаметра. Луч света, фокусируемый на носителе 4 записи линзой 3 объектива, располагается во внешней радиально области носителя 4 записи. Направление смещения луча, отраженного от оптического носителя 4 записи, после прохождения через линзу 3 объектива, на которое воздействует смещение линзы 3 объектива, вызванное приводом 6 верньера, обозначено стрелками 12. Стрелка 11 представляет направление перемещения линзы 3.
Выходные сигналы элементов А и С детектора соединены с первой точкой 15 суммирования, а выходные сигналы элементов В и D детектора соединены, в свою очередь, со второй точкой 16 суммирования. Соответствующие сигналы А+С и В+D суммирования, соответственно, передаются на фазовый детектор 14, на выходе которого присутствует сигнал ДДФ-ОД (DPD-TE) ошибки, определяемый в соответствии со способом ДДФ (DPD).
Выходные сигналы точек 15 и 16 суммирования соединены со входами дополнительной точки 18 суммирования. Таким образом, сумма сигналов всех элементов А, В, С и D детектора присутствует на выходе точки 18 суммирования. Этот сигнал представляет собой информационный сигнал HF, который поступает на узел оценки (здесь не показан) для преобразования в сигналы, которые могут быть переданы пользователю.
Для описания функционирования устройства в соответствии с настоящим изобретением рассмотрим сначала фиг.1. Структура фазового детектора 14 поясняется здесь на схеме. Фазовый детектор имеет преобразователи 19, 19’, фазовый компаратор 20 и низкочастотный фильтр 21. В конфигурации в соответствии с настоящим изобретением, как показано на фиг. 1, элементы 26S, 26Т с переменной цифровой задержкой установлены между преобразователями 19, 19’ и фазовым компаратором 20, причем указанные элементы задержки обычно не рассматриваются как часть фазового детектора. На входах фазового детектора 14 включены соответствующие преобразователи 19 и 19’, выходы которых в данном варианте воплощения соединены со входами фазового компаратора 20 через элементы 26S, 26Т задержки. Выход фазового компаратора 20 соединен с выходом фазового детектора 14 через низкочастотный фильтр 21, на выходе которого присутствует сигнал ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки, определенный по способу ДДФ (DPD).
Сигналы элементов А и С детектора суммируются в точке 15 суммирования, и сигнал суммы преобразуется в логические уровни в преобразователе 19, который работает как компаратор, настроенный на пересечение нуля. Соответствующий преобразованный в цифровой вид сигнал В+D суммирования формируется с помощью точки 16 суммирования и преобразователя 19’. Эти два сигнала проходят через соответствующий элемент 26S, 26Т задержки и подаются на фазовый компаратор 20, который оценивает относительный временной интервал между фронтами этих двух сигналов. Сигнал ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки представляет собой среднюю величину этой разницы времени и формируется с помощью низкочастотного фильтра 21. Если точка сканирования или пятно 29, как показано ниже, со ссылкой на фиг.3 точно проходит по центру 30 дорожки, то тогда пересечение нуля сигналов А+С и В+D суммирования происходит одновременно и получаемая в результате ошибка дорожки равна нулю. Если пятно 29 проходит по дорожке с постоянным отклонением по отношению к центру дорожки, то пересечение нуля этих сигналов суммирования больше не происходит одновременно, а скорее с временным сдвигом по отношению друг к другу. Получаемая разность времени, в среднем, приблизительно пропорциональна отклонению сканирования по отношению к центру дорожки, где разность времени по отношению к одному из сигналов может быть положительной или отрицательной. Другими словами, знак разности времени содержит направление, а абсолютная величина - величину отклонения.
На фиг.1 статическая регулировка смещения выполняется с помощью элементов 26S, 26Т задержки, то есть после точек 15, 16 суммирования. Устройство 25 переключения переключается в зависимости от сигнала ЗНАК (SIGN)(В) и в соответствии с ним сигнал АБС (ABS) (В) подается на один из элементов 26S, 26Т цифровой задержки. Элементы 26S, 26Т задержки могут, таким образом, быть присоединены к выходному сигналу VBS устройства 44 определения смещения с помощью переключающего устройства 25. Целью настоящего изобретения является также элемент цифровой задержки, имеющий фиксированное время задержки, и элемент переменной цифровой задержки, применяемые вместо двух элементов 26S, 26Т переменной задержки, установленных в этой точке, причем время задержки указанного элемента цифровой задержки сокращается или удлиняется в соответствии с фиксированным временем задержки другого элемента задержки в зависимости от сигнала VBS.
Два элемента 26Х и 26Y переменной аналоговой задержки, которые могут быть присоединены либо к элементам А и В детектора, либо к элементам С и D детектора с помощью устройства 37 переключения, устанавливаются для регулирования ошибки, вызванной перемещением линзы. Это позволяет задерживать сигналы одной пары А-В или другой пары C-D по отношению к соответствующим сигналам другой пары. Устройство 37 переключения переключается с помощью сигнала ЗНАК (SIGN) (А), и сигнала АБС (ABS) (А), который поступает на элементы 26Х, 26Y задержки.
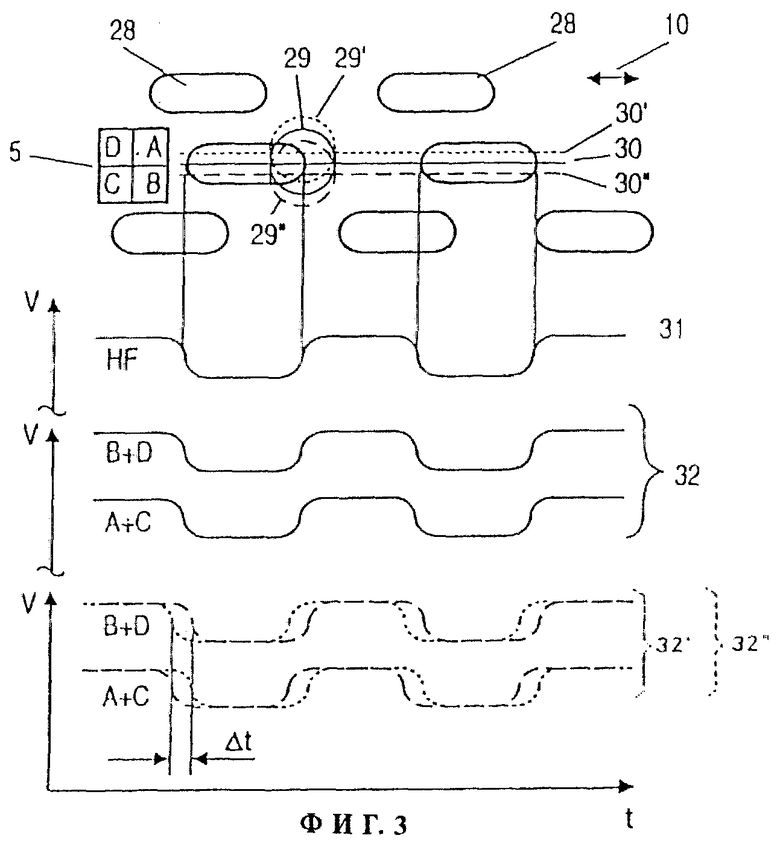
В верхней части фиг.3 схематически изображен, со значительным увеличением деталей, информационный слой оптического носителя 4 записи в виде сверху. Видны три дорожки, расположенные рядом друг с другом, на которых изображены две или три вмятины, так называемые ямки 28, которые формируют их, вытянутые в направлении дорожки. Расстояния между ямками 28 в направлении дорожки, а также длина ямок в направлении дорожки (стрелка 10), могут отличаться в определенных пределах от условий, изображенных здесь. Это зависит от используемого способа модуляции для преобразования информации, которая должна записываться в виде узора ямок, и от содержания записанной информации. В частности, ямки 28 могут иметь различную длину.
Четырехквадрантный детектор 5, который расположен симметрично по отношению к центру 30 центральной дорожки, и содержит элементы А, В, С и D детектора, изображен слева от ямок 28. Это сделано для иллюстрирования того, как выходные сигналы областей А, В, С и D детектора ведут себя, когда пятно 29 света падает на информационный слой, который смещен от центра 30 дорожки.
В нижней части фиг.3 схематично изображены амплитуды ряда комбинаций выходных сигналов областей А, В, С и D детектора по оси t времени, где ось t времени соответствует оси пространства в направлении дорожки в случае перемещения пятна 29 и оптического носителя записи в направлении дорожки (стрелка 10) по отношению друг к другу с нормальной скоростью считывания. В нижеследующем тексте, для упрощения, сигналы областей А, В, С, D детектора и сигналы, производные от них, в некоторых случаях также обозначены буквами элементов детектора.
Кривая 31, изображенная непосредственно ниже ямок 28, схематически изображает информационный сигнал HF, то есть сумму сигналов всех элементов А, В, С и D детектора. В случаях, когда пятно 29 не попадает ни на одну из ямок 28, амплитуда информационного сигнала HF высокая. Как только пятно 29 переходит на ямки 28, амплитуда понижается, как следствие деструктивных помех измененной отражающей способности или за счет другого соответствующего воздействия, и достигает минимума при достижении максимального пересечения пятна 29 и ямки 28.
Кривые 32 изображают комбинацию уже преобразованных в цифровой вид сигналов А+С и В+D без ошибок дорожки, то есть, когда пятно 29 сцентровано по отношению к центру 30 дорожки или когда отсутствует отклонение линзы 3 объектива. Кривые 32’ (пунктирная) и кривые 32" (штрих-пунктирная) показывают соответственно временной сдвиг суммы сигналов А+С и В+D в зависимости от смещения линзы или отклонения пятна 29’ и пятна 29’’, соответственно, от центра 30 дорожки в направлении смещенных дорожек 30’ и 30’’ сканирования соответственно. Поскольку отклонение от центра дорожки и смещение линзы приводит к одному и тому же результату, в суммарном цифровом сигнале эти две зависимости не могут быть отделены друг от друга. Временной сдвиг Δt сигналов А+С и В+D по отношению друг к другу соответствует по их абсолютной величине отклонению смещенных дорожек 30’ и 30’’ сканирования от центра 30 дорожки и, в смысле знака, направлению соответствующего отклонения. Фазовый детектор 14 определяет на их основании сигнал ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки, как было описано выше.
Следует отметить, что в зависимости от оптической конструкции сигналы областей А, В, С и D детектора могут сразу иметь временные статические сдвиги по отношению друг к другу в отсутствие отклонения от дорожки или отклонения линзы. Однако сдвиги В+D по сравнению А+С, которые показаны на кривых 32’ и 32’’, являются типичными в случае отклонения линзы или отклонения от центра дорожки.
Поскольку линза 3 объектива должна иметь возможность перемещения в горизонтальном направлении, то есть перпендикулярно направлению дорожки носителя 4 записи, смещение отраженного от информационной поверхности диска изображения на четырехквадрантном детекторе 5 также происходит в случае отклонения в горизонтальном направлении за счет геометрии луча. Поэтому особым свойством способа ДДФ (DPD) отслеживания является то, что в результате разницы во времени, полученной за счет перемещения линзы, сигнал ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки возрастает и не равен нулю, даже если пятно 29 проходит точно по центру 30 дорожки.
Ставя целенаправленным образом в зависимость сигнал одного или большего количества элементов А, В, С и D детектора от временной задержки, перед их сложением в точках 15 и 16 суммирования, соответственно, становится возможным получить компенсацию смещения в сигнале ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки, причем указанное смещение вызывается за счет перемещения линзы. Устройство в соответствии с настоящим изобретением, а также способ в соответствии с настоящим изобретением, позволяют в результате регулировки величин τX, τY задержки элементов 26Х, 26Y переменной задержки достичь наилучшей возможной компенсации смещения за счет перемещения линзы, а также в комбинации с переменным временем задержки элементов цифровой задержки, наилучшей возможной компенсации смещений, которые вызваны другими факторами.
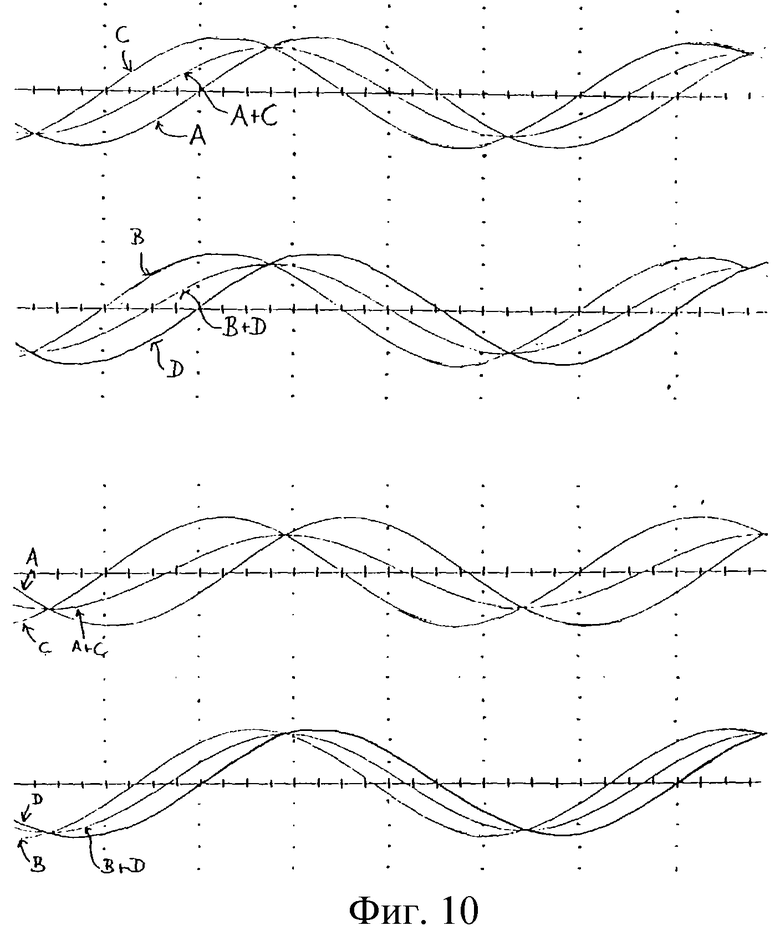
В верхней части фиг.10 изображена амплитудная характеристика и фаза сигналов элементов А, В, С и D детектора, а также сигналы А+D и В+D суммирования с использованием примера так называемого 3Т сигнала без какого-либо отклонения линзы объектива по отношению к дорожке и без установленной задержки. 3Т сигнал соответствует короткой ямке 28. Горизонтальная ось на фиг.10 соответствует соответствующей линии нуля, а вертикальные оси в виде пунктира отмечают каждые 5 интервалов времени с целью лучшей ориентации. Изображенные сигналы имеют одинаковую амплитуду; поэтому пересечения нуля соответствующих сигналов А+С и В+D суммирования проходят в центре между пересечениями нуля отдельных сигналов А и С и соответственно В и D. Фаза между сигналами А+С и В+D суммирования равна нулю.
В нижней части на фиг.10 изображена амплитудная характеристика и фаза сигналов А, В, С и D детектора, с использованием примера сигнала 3Т без какого-либо перемещения линзы, но с компенсацией с помощью задержки. В результате задержки два сигнала А и В смещены приблизительно на 1,2 интервала вправо по сравнению с верхней частью на фиг.10. Поскольку эти сигналы имеют одинаковую амплитуду, пересечение через ноль соответствующих сигналов А+С и В+D суммирования проходит в центре между пересечением нуля отдельных сигналов. Фаза между сигналами суммирования опять равна нулю. Таким образом, компенсация не влияет на фазу в отсутствие отклонения линзы.
В верхней части фиг.11 изображены амплитудная характеристика и фаза сигналов А, В, С и D детектора, на которой используются примеры сигнала 3Т с движением линзы, но без компенсации с помощью задержки. Фигура 11 соответствует фиг.10 в смысле структуры. За счет перемещения линзы в данном примере пересечение нуля сигнала А смещено вправо и сигнала В влево, по сравнению с верхней частью фиг.10. Поскольку сигналы А и С, а также В и D имеют различные амплитуды, пересечение нуля соответствующих сигналов А+С и В+D суммирования больше не лежит в центре между пересечениями нуля отдельных сигналов. Аналогично, разность фазы между сигналами суммирования больше не равна нулю, но скорее равна приблизительно одному интервалу в изображенном примере.
В нижней части фиг.11 изображены амплитудная характеристика и фаза сигналов А, В, С и D детектора с использованием примера 3Т сигнала с перемещением линзы и, в отличие от верхней части, с компенсацией с помощью задержки. Эффект задержки состоит в том, что два сигнала А и В смещены приблизительно на 1,2 интервала вправо по сравнению с верхней частью фиг.11. За счет перемещения линзы в данном примере пересечение нуля сигналов А смещено вправо, а В влево, как по сравнению с верхней частью фиг.10, так и фиг.11. Индивидуальные сигналы имеют различные амплитуды; поэтому пересечение нуля соответствующих сигналов А+С и В+D суммирования больше не находится в центре между пересечениями нуля отдельных сигналов. В результате компенсации, однако, разность фазы между сигналами суммирования равна нулю.
На фиг.12 изображена амплитудная характеристика и фаза сигналов А, В, С и D детектора с использованием примера 3Т сигнала со встречным направлением перемещения линзы по сравнению с фиг.11. В верхней части изображен случай без компенсации с помощью задержки. За счет перемещения линзы в другом направлении в данном примере пересечение нуля сигналом А смещено влево, а сигналом В вправо, по сравнению с фиг.10. Когда происходит смещение линзы объектива, сигналы также имеют измененную амплитуду в дополнение к сдвигу по фазе. Указанная амплитуда различна для отдельных сигналов, по этой причине пересечение нуля соответствующих сигналов А+С и В+D суммирования больше не лежит в центре между пересечением нуля отдельных сигналов. Аналогично, фаза между сигналами суммирования больше не равна нулю, но скорее в изображенном примере приблизительно равна одному интервалу в направлении, противоположном изображенному на фиг.11.
Соответствующие сигналы при компенсации с помощью задержки изображены в нижней части фиг.12. За счет задержки два сигнала А и В смещены приблизительно на 1,2 интервала вправо по сравнению с верхней частью фигуры. За счет перемещения линзы в другом направлении в данном примере пересечение нуля сигналами А смещено влево и В - вправо по сравнению с верхней частью фиг.10, как в верхней части фиг.12. Поскольку сигналы имеют различные амплитуды, пересечение нуля соответствующих сигналов А+С и В+D суммирования больше не проходит в центре между пересечениями нуля отдельными сигналами. В результате компенсации, однако, разность фазы между сигналами суммирования в этом случае также опять равна нулю.
В примерах, изображенных на фиг.10-12, смещение светового пятна детектора в направлении половины элементов В и С детектора, в случае, в котором сигналы В и С становятся больше, а сигналы А и D меньше, сопровождается временным смещением пересечения нуля сигналом А вправо и сигналом В влево. В случае встречного направления перемещения светового пятна сигналы А и D становятся больше и сигналы В и С, с другой стороны, становятся меньше. Временной сдвиг сигналов А и В точно также происходит в противоположном направлении.
Приведенный пример изображает только один из возможных вариантов поведения отдельных сигналов детектора, по отношению друг к другу; другие комбинации, такие как противоположное временное поведение при том же направлении смещения, как в примере, приводит к временному смещению сигналов С и D, вместо сигналов А и В, возникают также другие случаи. Это зависит от конструкции и от допусков оптической системы, а также от оптических свойств носителей записи, информация с которых воспроизводится.
Как видно на фиг.10-12, задержка соответствующего большего сигнала, сигнала В в верхней части фиг.11 и 12, приводит к большему смещению пересечения нуля суммы В+D, чем такая же задержка меньшего сигнала, в этом случае, например, сигнала А по отношению к сумме А+С, даже если абсолютные величины сдвига будут такими же для обоих сигналов А и В. Если информация об амплитуде в точке суммирования больше не будет доступна, то невозможно будет достичь правильной компенсации, так как взаимодействие между амплитудой и фазой будет утеряно. Поэтому настоящее изобретение направлено на применение аналоговой задержки перед суммированием.
Функционирование одного из вариантов воплощения устройства в соответствии с настоящим изобретением будет теперь описано со ссылкой на фиг.1. В результате перемещения линзы 3 параллельно поверхности носителя 4 записи перпендикулярно к направлению дорожки, то есть в направлении стрелки 11, в сигнале ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки будет сформировано смещение. В соответствии с одним из вариантов настоящего изобретения, привод 6 верньера будет приводиться в движение с помощью синусоидального интерференционного сигнала S от устройства 22 генерирования интерференционного сигнала. В результате линза 3 объектива будет двигаться относительно ее механического положения нуля с определенным механическим отклонением; это также называется качанием линзы 3 объектива. Частота привода в этом случае выбирается произвольно в определенных пределах. Целесообразно использовать частоту приблизительно 2-10 Гц, поскольку в этом случае время измерения или время интеграции, как описано более подробно ниже, по отношению к устройству управления 24, будет становиться слишком большим, если частота будет слишком низкой, и колебания будут приближаться к естественному резонансу, который для следящего устройства точно не определен, если частота будет слишком высокой. Когда линза 3 объектива будет затем отклоняться, модуляция огибающей сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки будет происходить в случае неправильной установки времени τX и τY задержки, соответственно, на элементах 26Х и 26Y аналоговой задержки.
Следящее устройство 22 отслеживает возбуждение, вызванное интерференционным сигналом S с некоторым запаздыванием. Фильтр нижних частот 27 с низкой частотой среза используется для определения модуляции сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки. Следовательно, прохождения через нуль модуляции на низкочастотной компоненте, используемой для оценки сигнала ошибки отслеживания дорожки, сигнала TELP будут смещены по времени по сравнению с пересечениями нуля интерференционного сигнала S. Этот сдвиг по фазе компенсирован с помощью фазосдвигающего устройства 23, сдвиг по фазе которого выбирается таким, что он соответствует сдвигу фазы, вызванному следящим устройством 13 и фильтром нижних частот 27. На выходе фазосдвигающего устройства 23 получается интерференционный сигнал WSY, смещенный по фазе, который также упоминается как сигнал качания, который синхронен колебаниям модуляции сигнала TELP, низкочастотной компоненты сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки.
Величины τS, τT, τX и τY времени задержки элементов 26S, 26Т, 26Х и 26Y задержки, соответственно, устанавливаются с помощью устройства 24 управления. С этой целью устройство 24 управления содержит устройство 44 определения смещения и устройство 45 сравнения. Последнее содержит, в одном из примеров воплощения, дифференциальную схему ДОУ (DSH) образца и удержания, синхронный демодулятор 33, компаратор 34 первого окна и схему 35 образца и удержания. После этого следует первый блок 36 схемы.
Сигнал WSY и выходной сигнал TELP низкочастотного фильтра 27 подаются на синхронный демодулятор 33, который формирует абсолютную величину модуляции сигнала TELP и интегрирует его. Если модуляция сигнала TELP и сигнала WSY синхронизации качания будут в фазе, то выходное напряжение VA повышается; если эти сигналы будут в противофазе, то выходное напряжение VA синхронного демодулятора 33 будет падать. Выходное напряжение VA подается с одной стороны на первую схему 35 образца и удержания, с другой стороны - на дифференциальную схему ДОУ (DSH) образца и удержания, которая производит напряжение VD, пропорциональное временному изменению напряжения VA. Напряжение VD, таким образом, отличается от нуля, когда выходное напряжение VA синхронного демодулятора 33 изменяется по времени. Оно равно нулю, когда выходное напряжение VA больше не изменяется по отношению ко времени. Это может быть определено с помощью компаратора 34 окна, к которому прикладываются напряжения ±VRD сравнения, которые могут быть заранее заданными фиксированными или, в другом случае, преимущественно, могут адаптивно устанавливаться для достижения соответствия. Выходной сигнал NMT указанного компаратора окна, таким образом, индицирует, когда сигнал ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки больше не имеет модуляции, которая синхронна с частотой интерференционного сигнала S.
Схема 35 образца и удержания вначале переключена в режим образца, то есть на "напряжение отслеживания", VAS=VA с помощью сигнала S/H1 управления, который вырабатывается контроллером (не показан). Выходное напряжение VAS схемы 35 образца и удержания подается на блок 36 схемы, который формирует абсолютную величину АБС (ABS) (А) и сигнал знака ЗНАК (SIGN) (А) выходного напряжения VAS. Знак сигнала ЗНАК (SIGN) (А) определяет пару элементов А и В или С и D детектора, которым предназначены элементы 26Х и 26Y переменной аналоговой задержки, время задержки которых определяется абсолютной величиной АБС (ABS) (А) выходного напряжения VAS. С этой целью устройство 37 переключения управляется сигналом ЗНАК (SIGN) (А) знака. Функция схемы, описанная таким образом, позволяет регулировать время τX, τY пары элементов задержки А и В или С и D детектора таким образом, что модуляция, зависящая от движения линзы сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки, будет компенсирована. Так как элементы 26Х, 26Y задержки являются аналоговыми компонентами, они не оказывают существенного влияния на форму волны сигналов, которые они задерживают, что приводит к тому, что она также все еще будет доступна во время суммирования с соответствующим сигналом без задержки в точках 15, 16 суммирования. Это существенно влияет на точность регулировки, которая может быть достигнута.
Если это будет выполнено, напряжение VAS будет удерживаться первой схемой 35 образца и удержания. Здесь теперь остается только постоянное смещение сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки, которое может быть скомпенсировано регулировкой времени задержки элементов 26S, 26Т задержки. Эта регулировка смещения выполняется с помощью устройства 44 определения смещения, которое содержит интегратор 39, компаратор 40 окна и схему 41 образца и удерживания. К ее выходу в данном примере воплощения подключен второй блок 42 схемы.
С целью регулировки смещения интегратор 39 и второй компаратор 40 окна соединены с выходом низкочастотного фильтра 27. Второй компаратор 40 окна определяет, имеет ли профильтрованный сигнал TELP ошибки отслеживания дорожки достаточно малую величину смещения по постоянному напряжению. Поскольку обычно это условие не выполняется после 1-ого этапа регулировки компенсации движения линзы для сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки, выходное напряжение VB интегратора 39 изменяется. Вторая схема 41 образца и удержания, на входе которой присутствует выходное напряжение VB, вначале переключается в режим образца. Выходное напряжение VBS схемы 41 образца и удержания, поэтому, следует за изменениями напряжения VB. Второй блок 42 схемы определяет абсолютную величину АБС (ABS) (В) и ЗНАК (SIGN) (В) выходного напряжения VBS.
Сигнал знака ЗНАК (SIGN) (В) управляет через устройство 25 переключения тем, для каких из элементов 26S, 26Т цифровой задержки установленное время задержки изменяется в соответствии с абсолютной величиной АБС (ABS) (В) напряжения VB или VBS. Напряжение VB и, таким образом, время задержки, установленное для элемента 26S или 26Т задержки, повышаются до тех пор, пока напряжение TELP на входе интегратора 39 не станет равным нулю, то есть входное напряжение на втором компараторе 40 окна становится меньшим, чем напряжение ±VRTE сравнения, приложенное к последнему. Это обеспечивает то, что напряжение смещения, которое накладывается на сигнал ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки, по существу равно нулю. Последняя, то есть оптимальная величина напряжения VB затем удерживается в ответ на соответствующий сигнал S/H2 контроллера (не показан) соответствующему сигналу NDT, как напряжение VBS второй схемы 41 образца и удержания. Регулировка на этом заканчивается. Интерференционный сигнал S теперь выключается, и включается регулятор 17 отслеживания. Напряжения VAS и VBS удерживаются до тех пор, пока не будет начата новая регулировка.
На фиг.4 изображена в качестве примера схема, в соответствии с которой выполняется регулировка устройства в соответствии с настоящим изобретением в вышеуказанных этапах.
После начала способа на этапе 50, на этапе 51 регулятор 17 отслеживания выключается, и устройство 22 генерирования интерференционного сигнала включается. В результате линза объектива качается так, как это описано в вышеописанном способе. На этапе 52, величины τS, τT, τU, τX и τY времени задержки элементов 26S, 26Т, 26U, 26Х и 26Y задержки повторно устанавливаются в исходное значение, в общем случае, в ноль. Для формирования сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки в соответствии с этапом 53 используется время между сигналами (А+С) и (В+D), которые получаются на выходе точек 15 и 16 суммирования и формируются из выходных сигналов элементов А, В, С и D детектора, выходные сигналы которого подаются через элементы 26Х, 26Y задержки, и в их части задерживаются, если это необходимо, элементами 26S, 26Т, 26U задержки. На этапе 54 модуляция сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки, которая вызвана интерференционным сигналом S, детектируется с помощью синхронного демодулятора 33. На этапе 55 происходит ответвление на этап 56, если дифференциальная схема ДОУ (DSH) образца и удержания все еще обнаруживает изменения в сигнале VA, то есть, если VA≠const. Если сигнал VA больше не изменяется, то способ ответвляется на этап 57.
На этапе 56 направление изменения, то есть тот факт, находится ли модуляция сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки в фазе или в противофазе с интерференционным сигналом S, определяет, на какой из этапов 58 или 59 должен переключиться способ. На этапе 58 элементы 26Х и 26Y задержки связаны с областями С и D детектора, и их время задержки увеличивается. На этапе 59 элементы 26X, 26Y задержки связаны с областями А, В детектора, и их величина τX и τY времени задержки увеличивается. После этапов 58 и 59 вновь выполняется этап 54. Эта петля цикла повторяется до тех пор, пока установленные величины времени задержки не станут достаточными для компенсации модуляции в сигнале ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки. В этом случае описанная петля цикла работает как интегрирование. Если выходное напряжение VA синхронного демодулятора 33, в соответствии с этапом 55, больше не изменяется, способ ответвляется на этап 57 и, таким образом, на компенсацию смещения. В случае каждого повторения петли цикла во время операции регулирования ответвление на этапе 56 происходит всегда идентично, так как знак VA не меняется, а меняется только абсолютная величина VA.
На этапе 57 установленные величины τX, τY запоминаются. На этапе 57, кроме того, определяется смещение напряжения постоянного тока с помощью низкочастотного фильтра 27 и второго компаратора 40 окна. Если смещение напряжения постоянного тока отличается от нуля, то есть, если TELP≠0, то способ ответвляется на этап 61. Если смещение постоянного напряжения равно нулю в пределах заранее заданных границ, напряжение ±VRTE сравнения в данном примере воплощения, то способ ответвляется на этап 62. На этапе 61 полярность смещения постоянного напряжения, то есть знак сигнала TELP определяет сигнал, с помощью которого элементы детектора получают дополнительную задержку. Если TELP<0, то способ ответвляется на этап 63, в противном случае, на этап 64. На этапе 63 дополнительная задержка элемента 26Т выполняется таким образом, что величина, соответствующая сигналу АБС (ABS) (В), устанавливается для величины τT времени задержки. На этапе 64 дополнительная задержка элемента 26S задержки выполняется таким образом, что величина, соответствующая АБС (ABS) (В), устанавливается для величины τS, времени задержки. После этапов 63 и 64 вновь выполняется этап 60. Эта петля цикла повторяется до тех пор, пока увеличение времени задержки элементов 26S или 26Т задержки, которое вызывает смещение постоянного напряжения, будет меньше, чем напряжение ±VRTE сравнения компаратора 40 окна. Повторяющееся выполнение этой петли цикла и одновременное прибавление в этом случае действует как интеграция.
В соответствии с этапом 62 величины τS, τT, τU, τX и τY времени задержки, которые были определены и установлены, запоминаются и удерживаются. Эти сохраненные величины представляют собой оптимальные величины компенсации. Поэтому способ оканчивается на этапе 65.
Схема, представленная на фиг.4, может быть реализована, например, с помощью логической схемы управления в соответствии с фиг.5 совместно с блок-схемой устройства в соответствии с настоящим изобретением, которое представлено на фиг.1. В этом случае логические элементы "И" обозначаются как И, логические элементы "ИЛИ" обозначаются как ИЛИ и элементы инверторов обозначаются как Н или НЕТ, а цифровые обозначения деталей обозначают количество соответствующих входов. Отдельные символы ссылки употребляются только в случае необходимости.
В результате выполнения сигнала СТАРТ (START) начинается операция регулировки, и линза 3 объектива начинает качаться. Так как модуляция сигнала ДДФ-ОД (DPD-ТЕ) ошибки отслеживания дорожки обычно присутствует за счет движения линзы, сигнал NMT находится на "низком", логическом уровне, что приводит к тому, что фронт сигнала в сигнале СТАРТ (START) переключает первую схему 35 образца и удержания в положение "образец" с помощью сигнала S/H1, который выходит с выхода первого цифрового триггера 71. Второй цифровой триггер 72 устанавливается сигналом NMT = "низкому" уровню, и сигнал обнуления IRE для интегратора 39 поддерживается для компенсации смещения постоянного напряжения. Стартовый импульс для второго цифрового триггера 72 также подавляется. Активирование первой схемы 35 образца и удержания позволяет автоматически выполнить первый этап регулировки, так как интегрирующий компонент уже содержится в синхронном демодуляторе 33. Процедура первого этапа заканчивается, когда напряжение VA больше не изменяется по времени и в соответствии с этим напряжение VD возвращается к нулевой величине.
Первый этап регулировки автоматически исключается, если сигнал NMT с самого начала будет на логическом уровне "высокий", то есть модуляция сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки будет по существу малой, даже без какой-либо задержки выходных сигналов элементов А и В или С и D детектора. Выходной сигнал NMT компаратора 34 окна переключается в положение "высокий", в результате чего первый цифровой триггер 71 вновь устанавливается в ноль, а второй цифровой триггер 72 устанавливается в единицу. В это же время схема 35 образца и удержания переключается в положение "удержание", и напряжение VAS для компенсации модуляции сигнала ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки запоминается. В это же время схема 41 образца и удержания переключается в положение "образец", и интегратор 39 включается через сигнал IRE = "низкий". Вторая регулировка также проходит автоматически, вследствие интеграции до тех пор, пока сигнал NDT не примет логический уровень "высокий".
В результате смещение по постоянному напряжению в сигнале ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки будет также компенсировано, и на этом регулировка заканчивается. Если смещение по постоянному напряжению будет равно нулю уже после 1-ого этапа регулировки, то сигнал NDT уже на этом этапе принимает значение "высокий" в этот же момент времени, и второй этап будет пропущен. Сигнал ADF передается за пределы схемы для индицирования того, что регулировка была успешно выполнена, и как модуляция, так и смещение равны нулю или ниже определенного порогового значения. С помощью сигнала УДЕРЖИВАТЬВСЕ (HOLDALL) обе схемы 35, 41 образца и удержания могут принудительно удерживаться в состоянии УДЕРЖАНИЯ (HOLD) с целью записи величин напряжений для элементов 26 задержки.
Последовательность регулировки в соответствии с фиг.5 изображена с помощью диаграммы сигналов на фиг.6. Отдельные сигналы обозначены так же, как и на фиг.1 и 5, и ось времени проходит вправо. Сдвиг по фазе между интерференционным сигналом S и сигналом ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки, который вызван приводом 6 верньера и низкочастотным фильтром 21, принимается равным нулю с целью упрощения. Для упрощения также время установки двух этапов регулировки показано таким, что оно слишком коротко по сравнению с периодом частоты качания.
Простая реализация устройства 24 управления, содержащего устройство 44, определяющее смещение, а также устройство 45 сравнения, выполненное на аналоговых компонентах, изображено на фиг.7. Это представление соответствует правой части фиг.1, и в нем также приведены соответствующие символы ссылки. Функционирование изображенной схемы понятно из приведенного выше описания; поэтому отдельные компоненты, такие как операционные усилители и т.д., не будут здесь описаны более подробно.
В соответствии с другой возможной конструкцией (здесь не показана) вместо низкочастотного фильтра 27 используется схема для определения разности между верхним и нижним огибающими сигналами ДДФ-ОД (DPD-TE) ошибки отслеживания дорожки. Эта разность минимальна в идеальном случае.
Еще одна возможная конструкция, которая также здесь не показана, представляет собой независящий от фазы синхронный выпрямитель с последовательным интегрированием, который используется вместо фазосдвигающего устройства 23 и синхронного демодулятора 33. Даже если в этом случае конструкция устройства будет несколько более усложненной для реализации, эта мера рекомендуется благодаря более высокой достижимой с ее помощью точности.
Так как схемы образца и удержания, которые работают с конденсаторами, используемыми для хранения заряда, не могут удерживать величину напряжения достаточно стабильно в течение длительного времени, за счет токов утечки, преобразование в цифровую форму значений этих выходных напряжений VA и VB и хранение величин в цифровом виде предусмотрено как преимущественное развитие настоящего изобретения. Напряжения VAS и VBS затем, в свою очередь, подаются на выход после цифроаналогового преобразования. В этом случае разделение на абсолютную величину и знак также предпочтительно происходит на цифровом уровне.
Особо предпочтительно интегрирование всей последовательности способа, т.е. всех блоков схемы в правой части фиг.1 и блоков на фиг.7 в микроконтроллере. Это требует обязательного применения низкочастотного фильтра 27 или, в качестве альтернативы, детектора огибающей, см. выше.
Выходное напряжение TELP поэтому будет представлено в цифровой форме микроконтроллером. Аналоговые элементы 26Х, 26Y задержки управляются через цифроаналоговый преобразователь или преимущественно непосредственно цифровым способом, и в связи с этим также представляют собой элементы цифровой задержки. Поскольку, как правило, микроконтроллер в любом случае управляет фокусированием и сервоприводом дорожки, он может быть одновременно задействован для отслеживания качания привода 6 верньера и содержать фазонезависимый синхронный детектор. Это существенно минимизирует дополнительные затраты на элементы схемы.
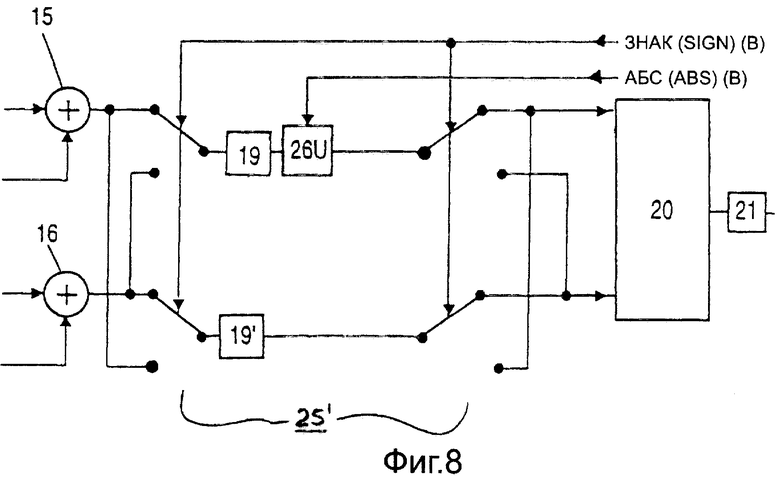
На фиг.8 изображена часть устройства в соответствии с настоящим изобретением в еще одном варианте воплощения, которая служит для регулирования смещения. Эта часть может заменять соответствующую часть, изображенную на фиг.1, которая расположена между точками 15, 16 суммирования, с одной стороны, и фазовым компаратором 20, с другой стороны. Здесь также уже сложенные сигналы А+С и С+D задерживаются между точками 15 и 16 суммирования, соответственно, и фазовым компаратором 20. С этой целью переменный элемент 26U цифровой задержки, на который подается сигнал АБС (ABS) (В), вводится в один из путей с помощью устройства 25’ переключения. Устройство 25’ переключения переключает сигнал в зависимости от сигнала ЗНАК (SIGN) (В). Два сигнала АБС (ABS) (В) и ЗНАК (SIGN) (В) получаются, как описано выше, из выходного сигнала VBS устройства 44 определения смещения. Преимущество этого усовершенствования состоит в том, что требуется только одиночный элемент 26U переменной цифровой задержки. Преобразователь 19 подсоединен, кроме того, перед элементом 26U переменной цифровой задержки, в то время, как преобразователь 19’ установлен в другом пути сигнала, который не содержит элемент переменной задержки. Преобразователи 19, 19’ могут быть подключены либо после устройства 25’ переключения, как показано на чертеже, либо до него.
На фиг.9 изображена часть устройства в соответствии с настоящим изобретением, соответствующая устройству, изображенному на фиг.8, в еще одном варианте воплощения. В этом случае, элемент 26А, 26В, 26С, 26D переменной аналоговой задержки соединен с каждым из элементов А, В, С, D детектора, и элемент 26S, 26Т переменной цифровой задержки установлен далее после каждой из точек 15, 16 суммирования. Преобразователи 19, 19’ расположены между точкой 15, 16 суммирования и элементом 26S, 26Т цифровой задержки. Устройство 25 переключения управляется сигналом ЗНАК (SIGN) (В) и соединяет один из элементов 26S, 26Т цифровой задержки к сигналу АБС (ABS) (В). Сигнал АБС (ABS) (А) подается на элементы 26А, 26В задержки или на элементы 26С и 26D задержки через устройство 25’’ переключения, которое переключается сигналом ЗНАК (SIGN) (В). Преимущество этого усовершенствования состоит в том, что могут использоваться устройства 25, 25’’ переключения более простой конструкции. Диапазон регулировки элементов 25А-25D аналоговой задержки может быть меньшим, что снижает сложность и, таким образом, затраты.
Разумеется, что практические комбинации отдельных усовершенствований, изображенных здесь для компенсации ошибки, вызванной движением линзы, и для компенсации смещения, также находятся в пределах области действия настоящего изобретения, даже если они не описаны здесь подробно. Выполнение установки элементов аналоговой и цифровой задержки с помощью этапов способа, которые включаются друг в друга, также находятся в области действия настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВОСПРОИЗВЕДЕНИЯ ДАННЫХ | 2006 |
|
RU2416828C2 |
| СПОСОБ ВОСПРОИЗВЕДЕНИЯ ДАННЫХ С ОПТИЧЕСКОГО НОСИТЕЛЯ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО ПЕРЕНОСА ДАННЫХ | 2006 |
|
RU2419892C2 |
| ОПТИЧЕСКИЙ НОСИТЕЛЬ ИНФОРМАЦИИ | 2003 |
|
RU2287862C2 |
| СИСТЕМА ЗАПИСИ СЕРВОДАННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ В НАКОПИТЕЛЯХ НА ДИСКАХ | 1995 |
|
RU2141691C1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ ЦИФРОВЫХ СИГНАЛОВ (ВАРИАНТЫ) | 1995 |
|
RU2150149C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОТСЛЕЖИВАНИЕМ ДЛЯ УСТРОЙСТВ ЗАПИСИ/ВОСПРОИЗВЕДЕНИЯ, УСТРОЙСТВО УПРАВЛЕНИЯ ОТСЛЕЖИВАНИЕМ В 8-МИЛЛИМЕТРОВОМ УСТРОЙСТВЕ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 1993 |
|
RU2155995C2 |
| УСТРОЙСТВО ЗАПИСИ ЦИФРОВОГО СИГНАЛА | 1995 |
|
RU2155388C2 |
| СИСТЕМА НА ОПТИЧЕСКИХ ДИСКАХ | 1996 |
|
RU2181217C2 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| ДИСКОВЫЙ НОСИТЕЛЬ ЗАПИСИ, УСТРОЙСТВО ДЛЯ НАРЕЗКИ И ПРИВОД ДИСКА | 2002 |
|
RU2295164C2 |






Изобретение относится к устройству для считывания с и/или записи на оптический носитель записи. Содержит следящее устройство, в котором используется дифференциальное детектирование фазы, четырехквадрантный детектор, две точки суммирования и фазовый компаратор для отслеживания в соответствии со способом дифференциального фазового детектирования. Также имеются элементы задержки, устанавливаемые с помощью устройства управления. Элементы аналоговой задержки включены до, а элементы цифровой задержки - после точек суммирования. Технический результат - улучшение возможности компенсации ошибок, возникающих за счет движения линзы. 9 з.п. ф-лы, 12 ил.

| US 4785441 A, 15.11.1988 | |||
| US 5073886 A, 17.12.1991 | |||
| US 4845701 A, 04.07.1989 | |||
| US 4998235 A, 05.03.1991 | |||
| US 5808979 A, 15.09.1998 | |||
| US 3591292 A, 06.07.1968 | |||
| Двухкоординатный преобразователь перемещения в код | 1988 |
|
SU1837390A1 |
| ДВУХКООРДИНАТНЫЙ ЛАЗЕРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2026607C1 |
| Устройство для измерений перемещений светового пятна | 1990 |
|
SU1768921A1 |

