Изобретение относится к области вакуумной техники и может быть использовано для передачи прерывистого вращения механизмам и узлам, находящимся в вакуумных камерах технологических установок.
Известен механический вакуумный ввод с сильфонным уплотнением (А.С. СССР №796594, МКИ F 16 J 15/52, 1979 г.). Устройство содержит корпус, ведущий вал, на котором одета гибкая оболочка (сильфон), и ведомый вал.
Недостатком является изменение давления в рабочей камере, возникающее при растяжении и сжатии гибкого элемента.
Известен также механический вакуумный ввод с гибким элементом, с наружной стороны которого установлены ролики (патент РФ №2175734, МКИ F 16 J 15/52, 2001 г.). Устройство содержит корпус, ведущий вал, на котором установлены ролики, ведомый вал и гибкая оболочка.
Недостатком является возможность деформации гибкой оболочки из-за создания вакуума и вследствие этого затруднение передачи вращения.
Наиболее близким по технической сущности является механический вакуумный ввод с П-образной вилкой (А.С. СССР №1359536, МКИ F 16 J 15/52, 1987 г.). Устройство содержит шток с жестко прикрепленным средством преобразования перемещения промежуточного звена во вращательное движение ведомого вала, выполненным в виде П-образной вилки. При этом внутри вилки расположен ведомый вал. Место прохода штока через стенку вакуумного объема уплотнено гибким элементом в виде сильфона.
Недостатками являются пульсация вакуума, возможность реверса вращения ведомого вала.
Задача изобретения - повышение производительности вакуумных технологических установок за счет вакуумного ввода бесконтактного подвижного уплотнения, обеспечивающего прерывистое вращение манипулятора с деталями по заданному закону. Закон движения задается количеством клиньев и количеством роликов, а также внутренним кулачковым профилем полого ступенчатого цилиндра.
Поставленная задача решается тем, что вакуумный механический ввод, содержащий ведущий вал, корпус, гибкий элемент в виде первого сильфона, ведомый вал, средство преобразования движения ведущего звена в перемещение промежуточного звена, средство преобразования перемещения промежуточного звена во вращательное движение ведомого вала, первую внутреннюю втулку, отличается тем, что введены полый ступенчатый цилиндр с внутренним кулачковым профилем, также первый, второй, третий и четвертый толкатели, в которые вставлены соответственно первая, вторая, третья, четвертая внутренние втулки, соответственно входящие в первый, второй, третий, четвертый сильфоны, которые выполнены внутри первой, второй, третьей, четвертой соответственно наружных втулок, прикрепленных к корпусу, причем первый, второй, третий и четвертый толкатели соединены с первым, вторым, третьим и четвертым кронштейнами, каждый из которых соединен с соответствующим первым, вторым, третьим и четвертым клином, при этом каждый клин соответственно расположен на первой, второй, третьей и четвертой направляющих; первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый ролики через соответствующие первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый штифты соединены с двухъярусным диском и фиксированы первым кольцом и вторым кольцом, нижний ярус двухъярусного диска выполнен в виде храпового механизма и фиксирован "собачкой", при этом двухъярусный диск соединен с ведомым валом через шлицы и фиксирован стопорным кольцом, также устройство содержит диск и крышку, которые соединены между собой и с корпусом.
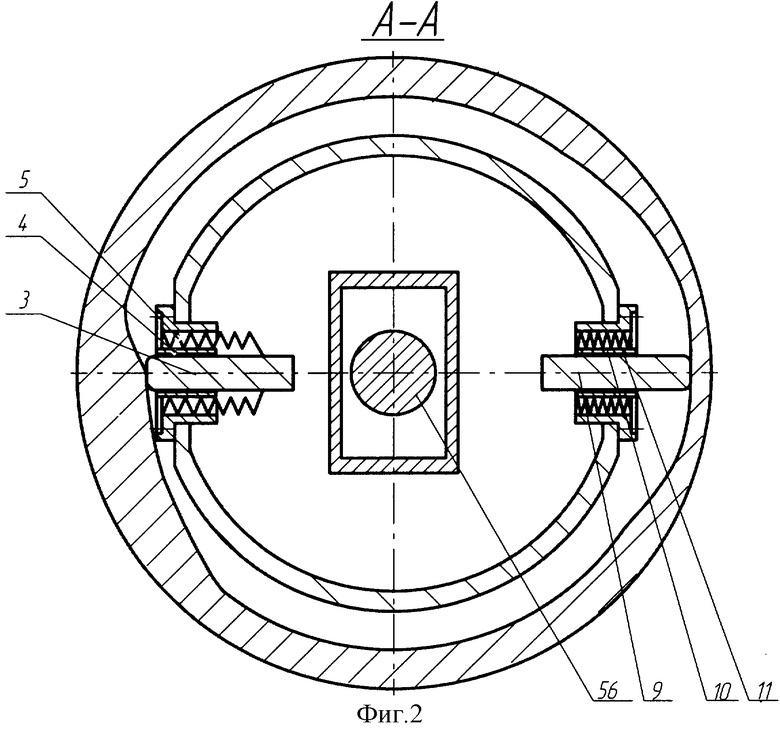
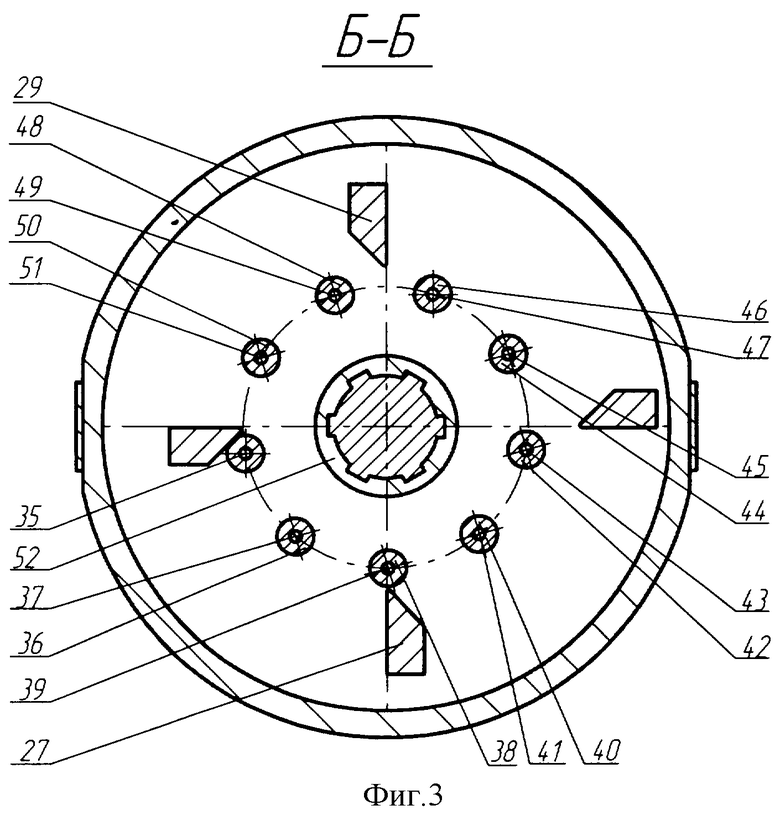
Устройство поясняется чертежами. На фиг.1 показан общий вид механического вакуумного ввода, на фиг.2, 3 изображены сечения, на фиг.4 изображена диаграмма движения.
Устройство содержит ведущий вал 1, на котором закреплен полый ступенчатый цилиндр 2 с внутренним кулачковым профилем. Первый толкатель 3 вставлен в первую внутреннюю втулку 4 и находится внутри первого гибкого элемента (сильфона) 5. Второй толкатель 6 вставлен во вторую внутреннюю втулку 7 и находится внутри второго сильфона 8. Третий толкатель 9 вставлен в третью внутреннюю втулку 10 и находится внутри третьего сильфона 11. Четвертый толкатель 12 вставлен в четвертую внутреннюю втулку 13 и находится внутри четвертого сильфона 14. Первый сильфон 5 находится в первой наружной втулке 15, второй сильфон 8 находится внутри второй наружной втулки 16, третий сильфон 11 находится в третей наружной втулке 17, четвертый сильфон 14 вставлен в четвертую наружную втулку 18. Первая наружная втулка 15, вторая наружная втулка 16, третья наружная втулка 17 и четвертая наружная втулка 18 прикреплены к корпусу 19. Первый толкатель 3 и третий толкатель 5 соединены с первой рамой 20, также первый толкатель 3 соединен с первым кронштейном 21, а третий толкатель 5 соединен с третьим кронштейном 22. А второй толкатель 4 и четвертый толкатель 6 - со второй рамой 23. Второй толкатель 4 соединен со вторым кронштейном 24 и четвертый толкатель 6 с четвертым кронштейном 25. Первый кронштейн 21 соединен с первым клином 26, второй кронштейн 24 соединен со вторым клином 27, третий кронштейн 22 соединен с третьим клином 28, четвертый кронштейн 25 соединен с четвертым клином 29.
Первый клин 26 расположен на первой направляющей 30, второй клин 27 расположен на второй направляющей 31, третий клин 28 расположен на третьей направляющей 32 и четвертый клин 29 находится на четвертой направляющей 33. В первый ролик 34 вставлен первый штифт 35, во второй ролик 36 вставлен второй штифт 37, в третий ролик 38 вставлен третий штифт 39, в четвертый ролик 40 вставлен четвертый штифт 41, в пятый ролик 42 вставлен пятый штифт 43, в шестой ролик 44 вставлен шестой штифт 45, в седьмой ролик 46 вставлен седьмой штифт 47, в восьмой ролик 48 вставлен восьмой штифт 49 и в девятый ролик 50 вставлен девятый штифт 51. Концы первого штифта 35, второго штифта 37, третьего штифта 39, четвертого штифта 41, пятого штифта 43, шестого штифта 45, седьмого штифта 47, восьмого штифта 49, девятого штифта 51 находятся в двухъярусном диске 52 и фиксируются первым кольцом 53 и вторым кольцом 54. Нижний ярус двухъярусного диска 52 выполнен в виде храпового механизма и фиксируется "собачкой" 55. Двухъярусный диск 52 соединен в ведомым валом 56 через шлицы и фиксировано стопорным кольцом 57. Подшипник сухого трения 58 находится внутри втулки подшипника сухого трения 59, которая соединена с корпусом 19. Внутри подшипника сухого трения 58 находится втулка 60, соединенная с ведомым валом 56. Также устройство содержит шаровой подшипник сухого трения 61, в котором находится втулка 62 и втулка ведомого вала 63. Сам шаровой подшипник сухого трения 61 вставлен в диск 64 и крышку 65, которые соединены между собой и с корпусом 19.
Количество клиньев в данном механизме может быть n, в зависимости от требуемого закона вращения ведомого вала. Целесообразно использовать четное число клиньев для исключения пульсации вакуума в рабочей камере и стабилизации работы вакуумного ввода. Данная конструкция механического вакуумного ввода разработана с 2 парами клиньев, т.к. данное количество является достаточным для получения необходимых свойств вакуумного ввода.
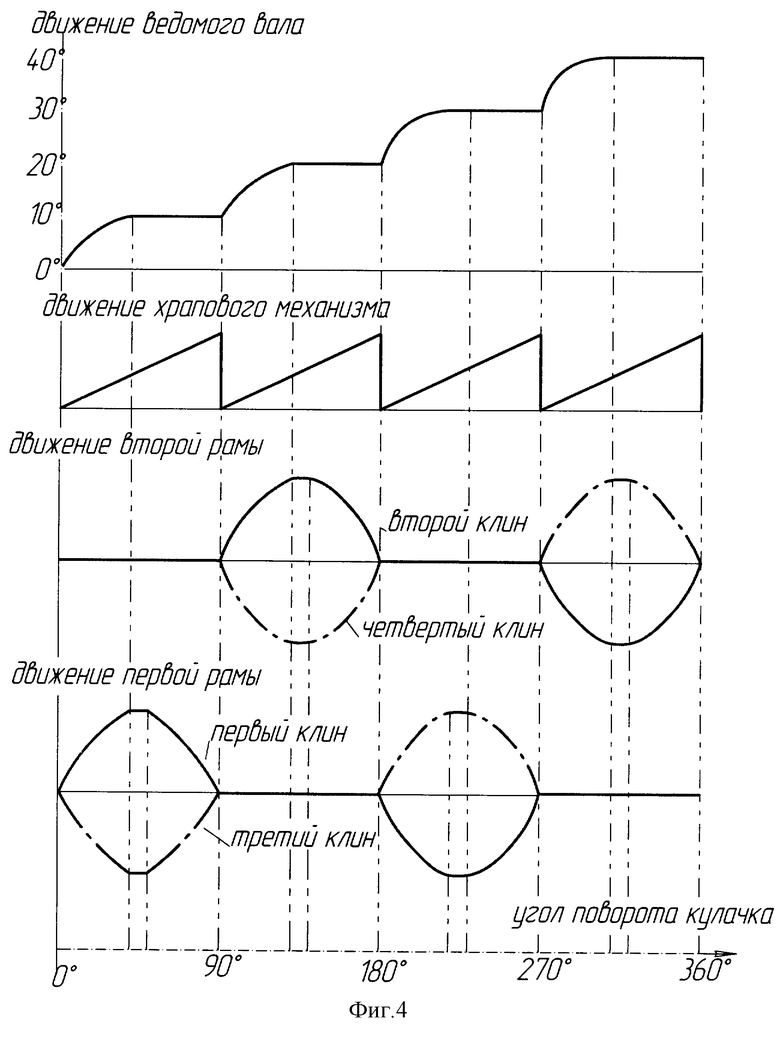
Работа механического вакуумного ввода осуществляется следующим образом. Крутящий момент от ведущего вала 1 передается полому ступенчатому цилиндру 2. За счет внутреннего профиля полого ступенчатого цилиндра 2 первый толкатель 3 через первый сильфон 5 начинает двигаться поступательно к центру оси вращения полого ступенчатого цилиндра 2, также вместе с ним начинают двигаться первая рама 20 и третий толкатель 9 (третий толкатель 9 двигается поступательно от центра оси вращения полого ступенчатого цилиндра 2), первый клин 26 и третий клин 28. Первый клин 26 входит в зацепление с первым роликом 34 и за счет угла профиля клина 45° двигает первый ролик 34, который, в свою очередь, через первый штифт 35 придает вращение двухъярусному диску 52 и ведомому валу 56. В момент завершения взаимодействия внутреннего профиля полого ступенчатого цилиндра 2 и первого толкателя 3 срабатывает храповой механизм, т.е. "собачка" 55 фиксирует положение двухъярусного диска 52, исключая возможность реверса. Через угол π/2 после начала взаимодействия полого ступенчатого цилиндра 2 и первого толкателя 3 полый ступенчатый цилиндр 2 приводит в движение второй толкатель 6 вместе со второй рамой 23, четвертым толкателем 12 и вторым клином 27, четвертым клином 29. Второй клин 27, двигаясь к центру оси вращения полого ступенчатого цилиндра 2, зацепляется с третьим роликом 38 и через третий штифт 39 поворачивает двухъярусный диск 52 и ведомый вал 56. В момент завершения взаимодействия внутреннего профиля полого ступенчатого цилиндра 2 и второго толкателя 6 срабатывает храповой механизм, исключая возможность реверса. Через угол π/2 после начала взаимодействия полого ступенчатого цилиндра 2 и второго толкателя 6 полый ступенчатый цилиндр 2 приводит в движение третий толкатель 9 вместе с первой рамой 20, первым толкателем 3 и первым клином 26, третьим клином 28. Первый клин 26, двигаясь к центру оси вращения полого ступенчатого цилиндра 2, зацепляется с пятым роликом 42 и через пятый штифт 43 поворачивает двухъярусный диск 52 и ведомый вал 56. В момент завершения взаимодействия внутреннего профиля полого ступенчатого цилиндра 2 и третьего толкателя 9 срабатывает храповой механизм, исключая возможность реверса. Через угол π/2 после начала взаимодействия полого ступенчатого цилиндра 2 и третьего толкателя 9 полый ступенчатый цилиндр 2 приводит в движение четвертый толкатель 12 вместе со второй рамой 23, вторым толкателем 6 и четвертым клином 29, вторым клином 27. Четвертый клин 29, двигаясь к центру оси вращения полого ступенчатого цилиндра 2, зацепляется с седьмым роликом 46 и через седьмой штифт 47 поворачивает двухъярусный диск 52 и ведомый вал 56. В момент завершения взаимодействия полого ступенчатого цилиндра 2 и четвертого толкателя 12 срабатывает храповой механизм, исключая возможность реверса. И так, за поворот полого ступенчатого цилиндра 2 на угол 2π ведомый вал 56 поворачивается на угол 40°, исключая возможность реверса. На фиг.3 показана диаграмма 1 - зависимость движения первой рамы 20 с первым клином 26 и третьим клином 28 от угла поворота полого ступенчатого цилиндра 2 с внутренним кулачковым профилем, диаграмма 2 - зависимость движения второй рамы 23 со вторым клином 27 и четвертым клином 29 от угла поворота полого ступенчатого цилиндра 2, также диаграмма 3 - зависимость движения "собачки" 55 от угла поворота полого ступенчатого цилиндра 2 и диаграмма 4 - зависимость вращения ведомого вала 56 от угла поворота полого ступенчатого цилиндра 2.
Итак, заявляемое изобретение позволяет повысить производительность вакуумных технологических установок, что подтверждают диаграммы движения первой рамы, второй рамы и ведомого вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКИЙ ВАКУУМНЫЙ ВВОД | 2006 |
|
RU2306470C1 |
| ВАКУУМНЫЙ МЕХАНИЧЕСКИЙ ВВОД | 2007 |
|
RU2339863C1 |
| Устройство для накатки кольцевых канавок на трубчатых заготовках | 1983 |
|
SU1133000A1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |
| Вариатор Н.П.Ефимова | 1983 |
|
SU1368550A2 |
| ТОРМОЗНОЙ МЕХАНИЗМ | 2001 |
|
RU2256829C2 |
| РЕДУКТОР ОРБИТАЛЬНЫЙ (ВАРИАНТЫ) | 2008 |
|
RU2380595C1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
Изобретение относится к области вакуумной техники и может быть использовано для передачи прерывистого вращения механизмам и узлам, находящимся в вакуумных камерах технологических установок. Вакуумный механический ввод содержит гибкий элемент в виде первого сильфона, ведомый вал, средство преобразования движения ведущего звена в перемещение промежуточного звена, средство преобразования перемещения промежуточного звена во вращательное движение ведомого вала, первую внутреннюю втулку. Дополнительно введены полый ступенчатый цилиндр с внутренним кулачковым профилем, четыре толкателя, в каждый из которых вставлены четыре внутренние втулки, входящие в соответствующие им сильфоны, которые выполнены внутри четырех наружных втулок, прикрепленных к корпусу. Каждый из толкателей соединен с соответствующим кронштейном, каждый из которых соединен с соответствующим клином, при этом каждый клин расположен на соответствующей ему направляющей. Девять роликов через соответствующие им штифты соединены с двухъярусным диском и фиксированы двумя кольцами, нижний ярус двухъярусного диска выполнен в виде храпового механизма и фиксирован "собачкой". Двухъярусный диск соединен в ведомым валом через шлицы и фиксирован стопорным кольцом, также устройство содержит диск и крышку, которые соединены между собой и с корпусом. Изобретение повышает производительность вакуумных технологических установок за счет вакуумного ввода бесконтактного подвижного уплотнения, обеспечивающего прерывистое вращения манипулятора с деталями по заданному закону. 4 ил.

Вакуумный механический ввод, содержащий ведущий вал, корпус, гибкий элемент в виде первого сильфона, ведомый вал, средство преобразования движения ведущего звена в перемещение промежуточного звена, средство преобразования перемещения промежуточного звена во вращательное движение ведомого вала, первую внутреннюю втулку, отличающийся тем, что введены полый ступенчатый цилиндр с внутренним кулачковым профилем, также первый, второй, третий и четвертый толкатели, в которые вставлены соответственно первая, вторая, третья, четвертая внутренние втулки, соответственно входящие в первый, второй, третий, четвертый сильфоны, которые выполнены внутри первой, второй, третьей, четвертой соответственно наружных втулок, прикрепленных к корпусу, причем первый, второй, третий и четвертый толкатели соединены с первым, вторым, третьим и четвертым кронштейнами, каждый из которых соединен с соответствующим первым, вторым, третьим и четвертым клином, при этом каждый клин соответственно расположен на первой, второй, третьей и четвертой направляющих; первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый ролики через соответствующие первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый штифты соединены с двухъярусным диском и фиксированы первым кольцом и вторым кольцом, нижний ярус двухъярусного диска выполнен в виде храпового механизма и фиксирован "собачкой", при этом двухъярусный диск соединен с ведомым валом через шлицы и фиксирован стопорным кольцом, также устройство содержит диск и крышку, которые соединены между собой и с корпусом.
| Устройство для передачи вращения в вакуумный объем | 1985 |
|
SU1359536A1 |
| МЕХАНИЧЕСКИЙ ВАКУУМНЫЙ ВВОД | 2000 |
|
RU2175734C1 |
| Герметичный ввод | 1979 |
|
SU796594A1 |
| US 3564469 A, 16.02.1971 | |||
| US 2906143 A, 29.09.1959. | |||

