Изобретение относится к двухкоординатным устройствам на линейных электродвигателях с программным управлением и может быть использовано в прецизионных станках и т.п. высокоточных устройствах.
Известен координатный стол, содержащий основание, две параллельные направляющие, закрепленные вдоль противоположных сторон основания, портал, установленный с возможностью реверсивного перемещения по направляющим, головку с рабочим органом. установленную с возможностью реверсивного перемещения вдоль портала, средства перемещения портала и головки с рабочим органом, которые выполнены в виде линейных электродвигателей, программный блок управления. См. описание к авторскому свидетельству SU №745720, кл. В 43 L 13/02, опубликованному в 1982 г.
Недостатком данного координатного стола являются ограниченные функциональные возможности и недостаточная точность из-за использования винтовых пар и отсутствия синхронизованного линейного электродвигателя на обе параллельные направляющие, по которым перемещается портал. Наличие портала, вертикальные стойки которого при перемещении образуют две “запретные” зоны, расположенные вдоль основания, сужает технологические возможности координатного стола по оснащению его загрузочными или дополнительными инструментальными и измерительными средствами. Кроме того, эти зоны увеличивают габариты основания и усложняют наладку инструментальных средств (расстояние от края борта основания до края листа достигает 0,6 м).
Известен взятый за прототип координатный стол, содержащий основание, две параллельные направляющие, закрепленные вдоль противоположных сторон основания, портал, установленный с возможностью реверсивного перемещения по направляющим, платформу в виде головки с рабочим органом, установленную с возможностью реверсивного перемещения вдоль портала, средства перемещения с направляющими и линейными электродвигателями, программный блок управления, при этом зубчатые статоры многофазных линейных электродвигателей размещены соответственно на каждой боковой направляющей и на портале, а их подвижные элементы - якорь (индукторы) снабжены трехсторонними аэростатическими опорами, при этом подвижные элементы боковых линейных электродвигателей прикреплены к концам портала посредством шарнирных опор, а на подвижном элементе портального линейного электродвигателя смонтирована платформа с рабочим органом, при этом основание выполнено в виде вакуумного планшета, а платформа с рабочим органом закреплена на подвижном элементе портального линейного электродвигателя с помощью магнитного фиксатора, выполненного в виде постоянного магнита с боковыми замыкателями, снабженного подвижной шунтирующей перемычкой. См. описание к патенту RU №2133184, кл. В 43 L 13/02, опубликованному в бюл. №20 от 20.07.99. Хотя по сравнению с аналогом создание координатного стола с прецизионным электроприводом на многофазных линейных электродвигателях повышает точность, надежность и долговечность работы, однако данный координатный стол имеет следующие недостатки:
- сложность обеспечения сохранности направляющих и статоров линейных электродвигателей от повреждения при эксплуатации координатного стола, т.к. они находятся обычно на уровне обрабатываемого листа, т.е. портал и направляющие с линейным электродвигателем, расположенные в рабочем пространстве, ограничивают технологические возможности координатного стола и усложняют его наладку и эксплуатацию;
- наличие 2-х синхронизированных линейных электродвигателей продольного перемещения не позволяет реализовать стабильный баланс сил трения кареток 2-х направляющих и движущей силы, приложенной вдоль одной из них (т.е. от одного линейного электродвигателя);
- наличие портала, как и в аналоге, вертикальные стойки которого при перемещении образуют две “запретные” зоны, расположенные вдоль основания, сужает технологические возможности координатного стола по оснащению его загрузочными или дополнительными инструментальными и измерительными средствами. Кроме того, эти зоны увеличивают габариты основания и усложняют наладку инструментальных средств (расстояние от края борта основания до края листа достигает 0,6 м);
- является громоздким и сложным в наладке, переналадке и эксплуатации.
Эти недостатки снижают условия труда при наладке и эксплуатации.
Задачей, на решение которой направлено изобретение, является упрощение конструкции, улучшение технологичности изготовления, повышение надежности, возможность быстрого переоснащения и наладки. Снижение массы. Улучшение условий эксплуатации.
Ожидаемый технический результат заключается в создании координатного стола с использованием принципов модульного изготовления и сборки и являющегося базовым модулем для создания обрабатывающих комплексов с высокой точностью, лучшими эксплуатационными и техническими характеристиками, меньшей металлоемкостью и наименьшими затратами.
Это достигается тем, что координатный стол, содержащий основание, средства перемещения с направляющими и линейными электродвигателями и платформу для размещения рабочего органа, имеет основание и средства перемещения, которые состоят из отдельных модулей с присоединительными монтажными поверхностями и включают модуль продольного перемещения с линейным электродвигателем и направляющими и модуль поперечного перемещения с линейным электродвигателем и направляющими, кареткой и платформой, при этом линейные электродвигатели модуля продольного перемещения и модуля поперечного перемещения расположены между направляющими.
Модуль продольного перемещения выполнен в виде прямоугольной продольной рамы с регулируемыми опорами и кареткой и состоит из двух крайних балок с расположенными сверху линейными шариковыми направляющими и одной средней балки, на которой сверху установлен статор линейного электродвигателя, при этом крайние балки и средняя балка связаны между собой поперечинами.
Каретка выполнена в виде П-образной траверсы и состоит из плиты и двух вертикально расположенных стоек с нижним расположением опорных плит, на которых расположен модуль поперечного перемещения, включающий балку поперечного перемещения с линейным электродвигателем, состоящим из якоря и статора, две линейные шариковые направляющие, а также платформу для размещения рабочего органа.
Координатный стол во втором варианте исполнения содержит основание, средства перемещения с направляющими и линейными электродвигателями и платформу для размещения рабочего органа, при этом основание и средства перемещения состоят из отдельных модулей с присоединительными монтажными поверхностями и включают модуль продольного перемещения с линейным электродвигателем и направляющими и модуль поперечного перемещения с линейными электродвигателем и направляющими, кареткой и платформой, при этом линейные электродвигатели модулей продольного перемещения и поперечного перемещения расположены между направляющими, причем модуль продольного перемещения выполнен в виде прямоугольной рамы с регулируемыми опорами и состоит из двух крайних балок с линейными шариковыми направляющими и средней балки, на которой установлен статор линейного электродвигателя, с расположением шариковых направляющих и линейного электродвигателя на нижней плоскости продольной рамы, при этом крайние балки и средняя балка связаны между собой поперечинами,
Модуль продольного перемещения расположен на монтажных площадках двух прямоугольных рам основания, имеющих косынки с обращенной внутрь основания стороны, и связаны между собой двумя призматическими бортами.
Призматические борта имеют форму треугольного сечения с фланцевым соединением и выполнены из стального профиля квадратного или прямоугольного сечения и связанного поперечными ребрами.
Прямоугольные рамы, ребра призматических бортов, продольная рама и балка поперечного перемещения представляют собой сварные конструкции стальных профилей квадратного или прямоугольного сечения.
Модули продольного перемещения и поперечного перемещения имеют ограничители хода с амортизаторами.
Модули продольного перемещения и поперечного перемещения имеют линейные шариковые направляющие.
Все конструкции модулей имеют рым-болты.
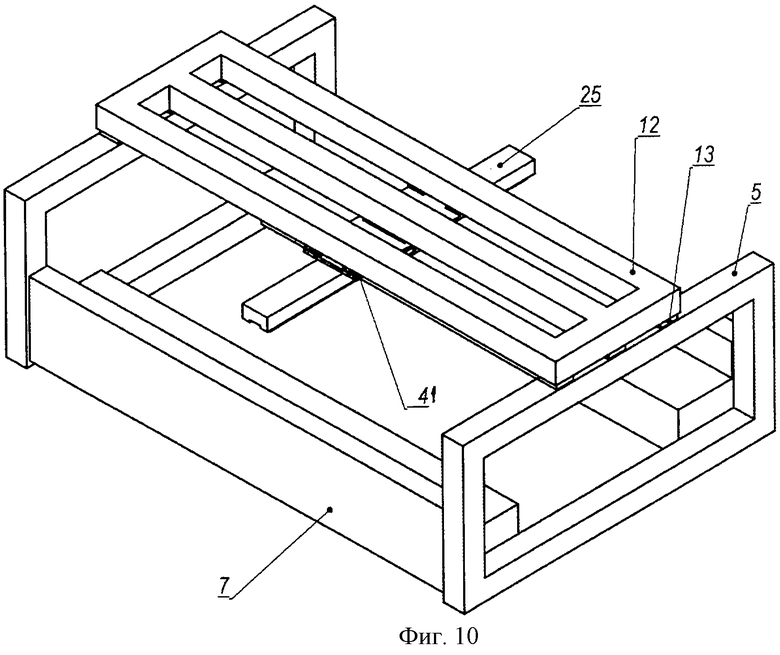
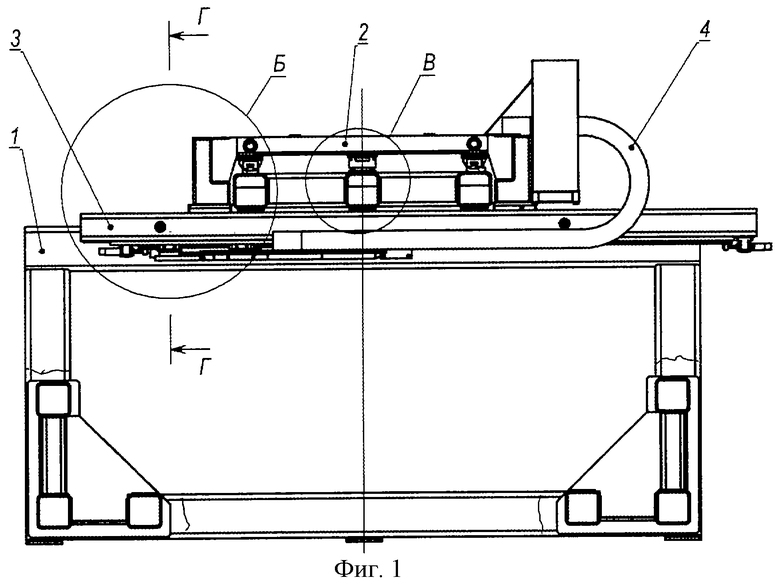
На фиг.1 изображен общий вид координатного стола.
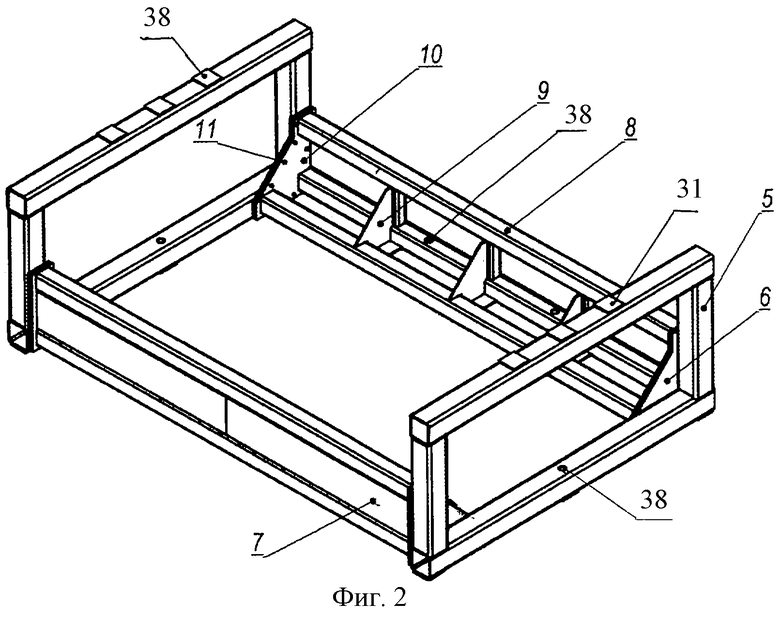
На фиг.2 - основание в аксонометрии.
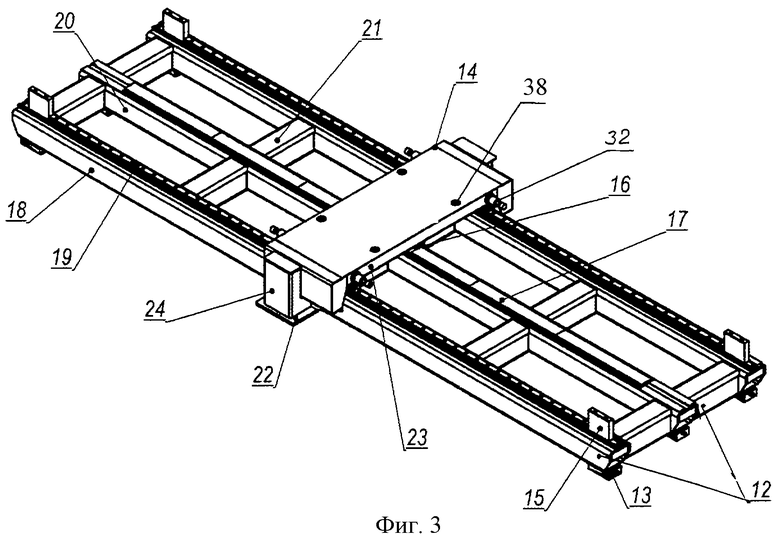
На фиг.3 - модуль продольного перемещения в аксонометрии.
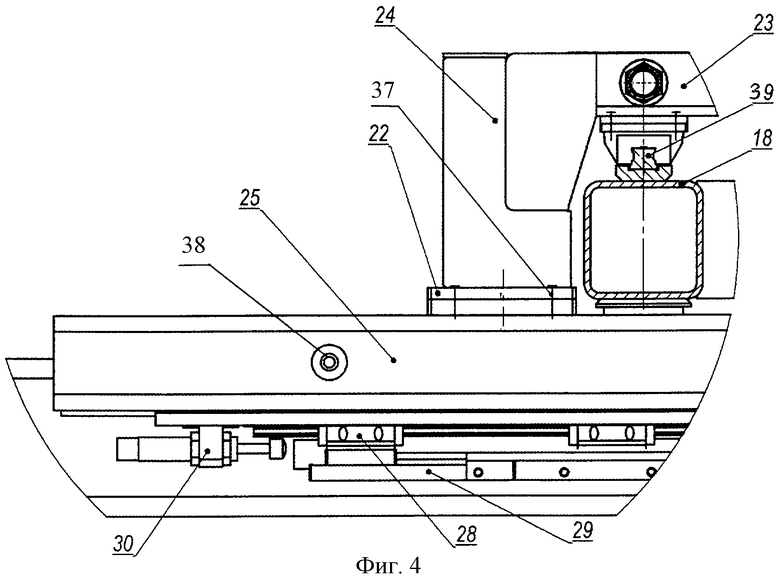
На фиг.4 - выносной элемент Б.
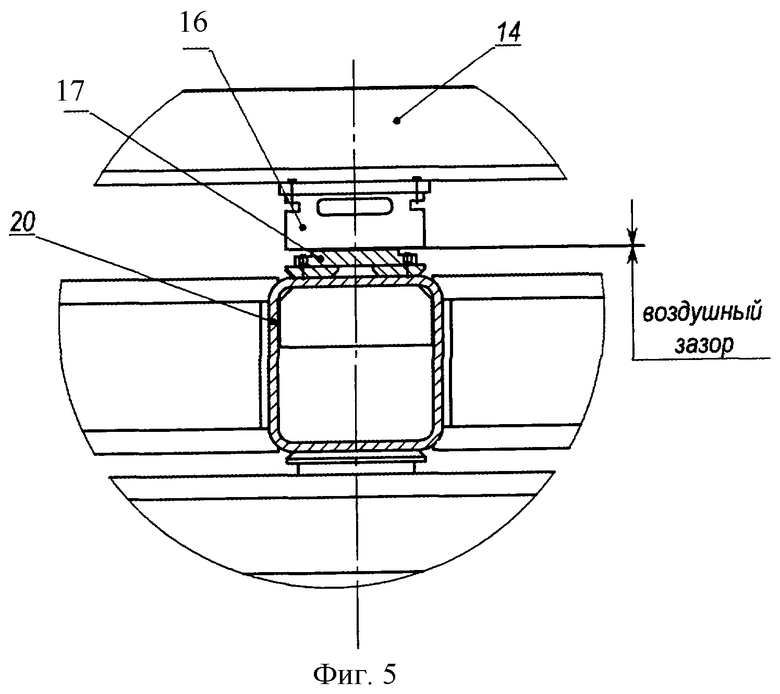
На фиг.5- выносной элемент В.
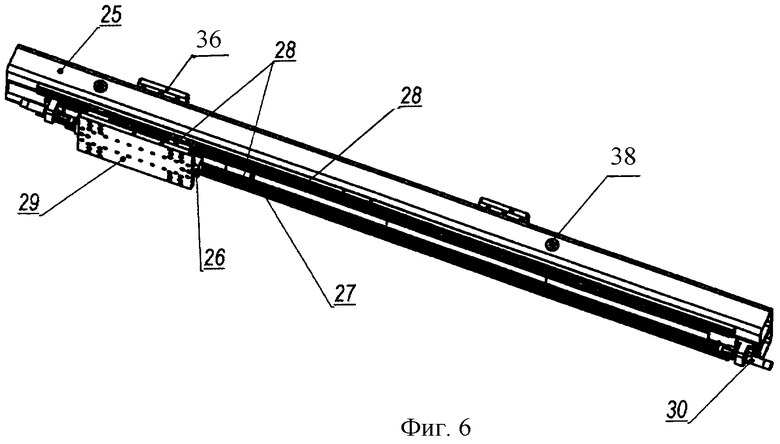
На фиг.6 - модуль поперечного перемещения в аксонометрии.
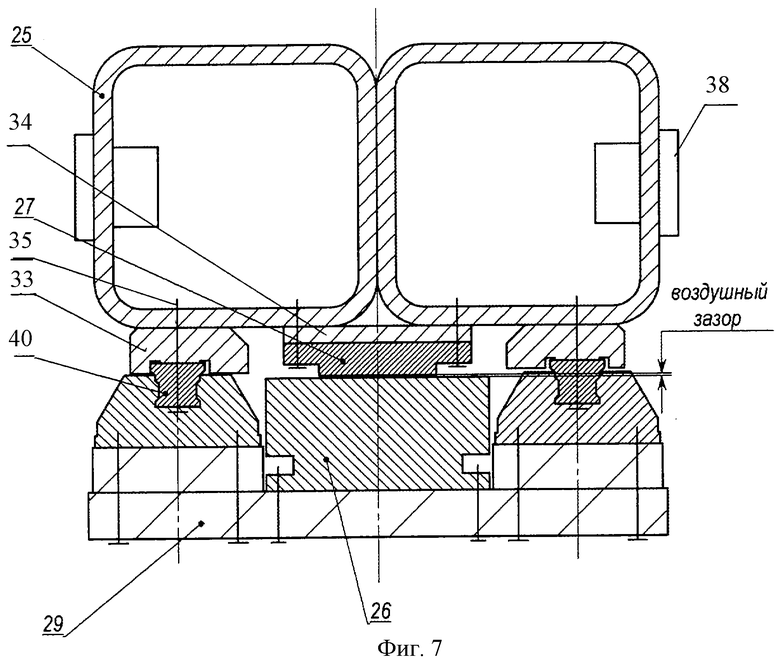
На фиг.7 -сечение Г-Г.
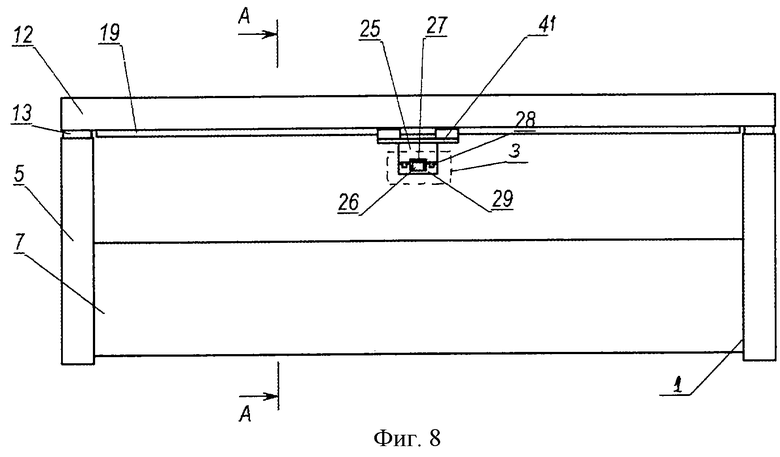
На фиг.8 изображен вид сбоку координатного стола с расположением шариковых направляющих и линейного электродвигателя на нижней плоскости продольной рамы.
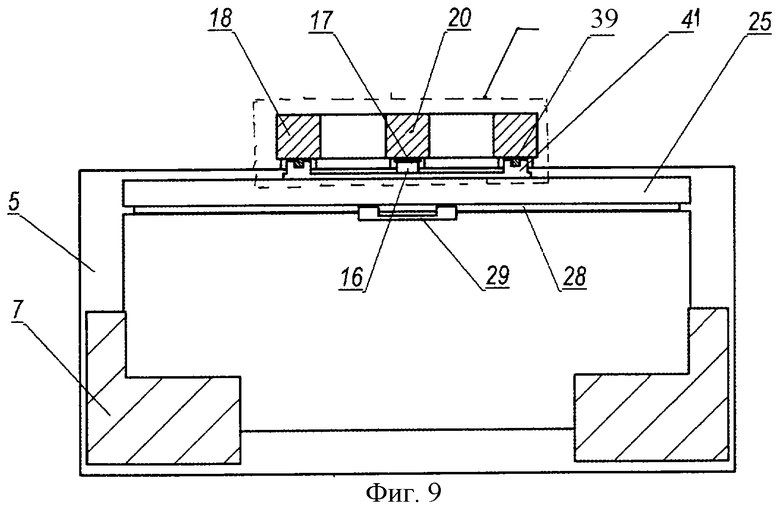
На фиг.9 - сечение А-А.
На фиг.10 изображен координатный стол с расположением линейных шариковых направляющих и линейного электродвигателя на нижней плоскости продольной рамы в аксонометрии.
Координатный стол содержит основание 1, средства перемещения в составе модуля продольного перемещения 2, модуля поперечного перемещения 3 и систему кабель-каналов 4 для программного блока управления.
Основание 1 (см. фиг.2) состоит из двух прямоугольных рам 5, нижние углы которых усилены косынками 6 со стороны, обращенной внутрь основания. Прямоугольные рамы 5 снизу связаны 2-мя призматическими бортами 7 треугольного сечения с фланцевым соединением. Ребра 8 призматических бортов 7 выполнены из стального профиля квадратного или прямоугольного сечения и связаны поперечными ребрами 9. Торцы бортов 7 имеют фланцы 10, стыковые плоскости которых прилегают к плоскостям косынок 6 прямоугольных рам 5 и связаны с ними болтовыми соединениями 11.
Сверху прямоугольных рам 5 расположен модуль продольного перемещения 2, состоящий из прямоугольной продольной рамы 12 (см. фиг.3 и 5) с регулируемыми опорами 13, каретки 14, ограничителей хода 15 и линейного электродвигателя, состоящего из якоря (индуктора) 16 и статора 17. Продольная рама 12 состоит из двух крайних балок 18 с расположенными сверху линейными шариковыми направляющими 19 и средней балки 20, на которой сверху установлен статор 17 линейного электродвигателя. Крайние балки 18 и одна средняя балка 20 связаны между собой поперечинами 21, а линейные электродвигатели расположены между направляющими.
Каретка 14 выполнена в виде П-образной траверсы с нижним расположением опорных плит 22 и состоит из (пустотелой) плиты 23 и 2-х вертикально расположенных стоек 24.
К опорным плитам 22 каретки 14 крепится модуль поперечного перемещения 3, который включает балку поперечного перемещения 25 (см. фиг.4 и 6), линейный электродвигатель, состоящий из якоря (индуктора) 26 и статора 27, две линейные шариковые направляющие 28, а также платформу 29 для размещения рабочего органа и ограничители хода 30.
Прямоугольные рамы 5, призматические борта 7, продольная рама 12 и балка поперечного перемещения 25 представляют собой сварные конструкции с максимальным использованием стандартных стальных профилей квадратного или прямоугольного сечения.
В изготовленном образце были использованы квадратные трубы 150×150, 200×200 и 120×120 по ГОСТ 8639-82. Применение тонкостенных профилей (толщиной стенки S=6...10 мм) позволяет сократить количество сварочных швов при создании пространственных конструкций, как наиболее жестких и малой массы. Меньше швов, меньше остаточных напряжений и стабильнее размерная точность несущих элементов, которая определяет точность обработки изделий. Каретка 14 также сварная, но из швеллерных профилей.
После сварки все несущие конструкции подвергаются термообработке для снятия остаточных напряжений, затем проводится механическая обработка присоединительных монтажных поверхностей.
Сборка основания 1 осуществляется следующим образом (см. фиг.2). Косынки 6 прямоугольных рам 5 соединяются с фланцами 10 бортов 7 болтовыми соединениями 11, и собранное основание фиксируется анкерными болтами на фундаменте. При этом контролируется горизонтальность верхних монтажных площадок 31 прямоугольных рам 5 в пределах 0,4...0,6 мм.
Сборка модуля продольного перемещения 2 осуществляется следующим образом. На верхней плоскости крайних балок 18 (см. фиг.4) при помощи винтов устанавливают линейные шариковые направляющие 19 с контролем их параллельности. Далее закрепляют секции статора 17 (см. фиг.3). Якорь (индуктор) 16 винтами закрепляют к нижней плоскости каретки 14 (см. фиг.5), которую закрепляют на подвижных элементах 39 (см. фиг.4) линейных шариковых направляющих 19. Воздушный зазор (якорь-статор) обеспечивается размерной точностью при обработке монтажных поверхностей продольной рамы 12 и каретки 14 (см. фиг.3). Устанавливаются ограничители хода 15 по торцам крайних балок 18 и амортизаторы 32 по торцам плиты 23 каретки 14.
Сборка модуля поперечного перемещения 3 осуществляется следующим образом.
На нижней плоскости балки поперечного перемещения 25 (см. фиг.7), состоящей из двух трубчатых квадратного сечения профилей с присоединительными монтажными поверхностями 33 и 34, при помощи винтов 35 устанавливают линейные шариковые направляющие 28 с контролем их параллельности, далее закрепляют секции статора 27. Якорь 26 винтами закрепляют к верхней плоскости платформы 29 и устанавливают ее на подвижных элементах 40 линейных шариковых направляющих 28. Воздушный зазор (якорь-статор) обеспечивается размерной точностью при обработке монтажных поверхностей 33 и 34. Устанавливаются ограничители хода 30 с амортизаторами по торцам балки поперечного перемещения 25 (см. фиг.4 и 6). На верхней плоскости балки поперечного перемещения 25 устанавливаются монтажная площадка с регулируемыми опорами 36.
Сборка координатного стола производится следующим образом. На верхние монтажные площадки 31 рам 5 (см. фиг.2) на регулируемых опорах 13 устанавливается модуль продольного перемещения 2, опорами 13 выставляется горизонтальность перемещения каретки 14, при этом контроль производится по поверхностям опорных плит 22 в пределах 0,02 мм на 1000 мм.
После этого болты (на фиг. не показаны) опор 13, связывающие раму 12 с рамами 5 затягиваются. Далее к опорным плитам 22 подвешивается балка поперечного перемещения 25 и закрепляется винтами 37. При этом контролируется перпендикулярность хода платформы 29 относительно оси продольного перемещения каретки 14 в пределах 0,02 мм на 1000 мм.
Работа координатного стола происходит следующим образом. По управляющим сигналам программного блока управления (системы ЧПУ) через систему кабель-каналов 4 линейный электродвигатель модуля продольного перемещения 2 осуществляет реверсивное перемещение каретки 14 с установленным на ней модулем поперечного перемещения 3 по заданной координате X, а линейный электродвигатель модуля поперечного перемещения 3 осуществляет реверсивное перемещение платформы 29 по координате У.
Контроль фактического положения платформы 29 осуществляется измерительными системами линейных перемещений, встроенными (интегрированными) в линейные направляющие 19 и 28. Рабочий орган, закрепленный на платформе 29, совершает движение в горизонтальной плоскости (параллельной плоскости листа) по координатам, заданным технологической программой.
Таким образом, координатный стол является базовым модулем для создания обрабатывающих комплексов. В нем заложены принципы модульного изготовления и сборки. Так, рама 5, призматические борта 7, прямоугольная продольная рама 12, модуль поперечного перемещения 3, каретка 14 имеют независимую сборку и снабжены рым-болтами 38 для сборки в единую конструкцию координатного стола. Это сделано с целью исключения необходимости применения оборудования больших габаритов в цикле его изготовления. Необходимая жесткость несущей конструкции основания достигается нижним многоопорным (анкерные болты равномерно расположены по периметру основания) креплением основания 1 через призматические борта 7 и рамы 5 к фундаменту. Образование П-образной кареткой 14 и балкой поперечного перемещения 25 замкнутой О-образной конструкции позволяет в комплексе повысить жесткость несущих конструкций подвижных узлов модулей продольного 2 и поперечного 3 перемещений без увеличения массы. Координатный стол имеет прозрачную архитектуру за счет установки модулей продольного 2 и поперечного 3 перемещений в верхней части основания 1. Это позволяет освободить рабочую зону от движущихся частей и обеспечить многовариантность использования модулей подачи и фиксации заготовки на рабочей плоскости координатного стола.
Ввиду специфичности реализации функции вертикального перемещения инструмента (координата Z) в рабочем органе (например, лазерная обработка) в данной конструкции координатного стола модуль вертикального перемещения отсутствует. Функция вертикального перемещения, при необходимости, реализуется дополнительным навесным модулем.
В случае если линейные направляющие 19 и линейный электродвигатель расположены на нижней плоскости прямоугольной продольной рамы 12 (см. фиг.8, 9 и 10), то каретка 14 выполнена в виде плиты 41, связывающей подвижные элементы 39 линейных направляющих 19, и на ней закреплена балка поперечного перемещения 25. Кроме того, при ширине балки поперечного перемещения 25, достаточной для формирования необходимого расстояния в продольном направлении между подвижными элементами, находящимися в паре на одной направляющей, то общей плиты 41 может и не быть. В этом случае балка поперечного перемещения 25 закрепляется непосредственно на подвижные элементы 40 линейных направляющих 28.
Высокие скорости перемещений (до 2,5 м/с), точность позиционирования до 0,01 мм обеспечивается применением линейных электродвигателей и высокоэффективной системой ЧПУ. Высокая точность обработки обеспечивается применением линейных шариковых направляющих. Компоновка координатного стола, в отличие от традиционных конструкций портального типа, позволяет сократить массу подвижных частей и использовать в модуле продольного перемещения 2 один линейный электродвигатель. Кроме того, исключается необходимость синхронизации боковых линейных электродвигателей, исключается возможность заклинивания кареток подвижных узлов от перекосов из-за погрешностей в синхронизированной работе 2-х линейных электродвигателей. Центральное приложение движущей силы благоприятно сказывается на тяговой характеристике линейных электродвигателей. Использование в несущих конструкциях стандартных профилей позволит сократить технологический цикл изготовления, снизить энергоемкость. Этому также способствует широкое использование покупных изделий. Технологичность конструкции позволяет обеспечить изготовление продукции без применения специального оборудования. При эксплуатации разрабатываемого комплекса предполагается использование стандартного программного обеспечения, такого, как Windows 2000, Solid Works, AutoCAD, и др., имеющих дружественный интерфейс, что позволит исключить дополнительные расходы на переобучение обслуживающего персонала. Кроме того, модульная конструкция координатного стола и его системы управления позволит сократить потери времени на ремонт и наладку узлов. Ввиду того, что у данной конструкции координатного стала точность слежения составляет величину порядка 10 мкм, появляется возможность проведения на нем чистовой обработки изделий и за счет исключения дополнительных операций снизить степень загрязнения окружающей среды (уменьшение количества отходов, энергозатрат). Кроме того, применение линейных электродвигателей исключает наличие перемещений вращающихся деталей типа ШВП (шарико-винтовая пара), подшипников, зубчатых колес, что значительно сокращает шум.
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНЫЙ СТОЛ ДЛЯ ЛАЗЕРНОГО СТАНКА | 2020 |
|
RU2731492C1 |
| МАНИПУЛЯТОР | 2009 |
|
RU2423222C1 |
| КООРДИНАТНЫЙ СТОЛ | 2010 |
|
RU2472606C2 |
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| КООРДИНАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173625C1 |
| УСТРОЙСТВО ДЛЯ МОДИФИКАЦИИ СИНТЕТИЧЕСКОГО УТЕПЛИТЕЛЯ | 2013 |
|
RU2549071C2 |
| МАНИПУЛЯТОР | 2008 |
|
RU2381891C1 |
| Установка для изготовления железобетонных изделий | 1986 |
|
SU1831426A3 |
| КООРДИНАТНЫЙ СТОЛ | 2009 |
|
RU2417870C2 |
Изобретения относятся к двухкоординатным устройствам на линейных электродвигателях с программным управлением и могут быть использованы в прецизионных станках и других высокоточных устройствах. Координатный стол содержит основание и средства перемещения, которые состоят из отдельных модулей с присоединительными монтажными поверхностями. При этом средства перемещения выполнены в виде модуля продольного перемещения с линейным электродвигателем, направляющими и кареткой и модуля поперечного перемещения с линейным электродвигателем, направляющими и платформой для размещения рабочего органа. Упомянутые линейные электродвигатели модулей продольного и поперечного перемещений расположены между направляющими. Во втором варианте исполнения координатного стола модуль продольного перемещения выполнен в виде прямоугольной продольной рамы с регулируемыми опорами, на нижней плоскости которой расположены его направляющие и линейный электродвигатель, причем упомянутая рама состоит из двух крайних и средней балок, связанных между собой поперечинами. Указанные конструкции с использованием принципов модульного изготовления и сборки являются базовыми для создания обрабатывающих комплексов с высокой точностью, лучшими эксплуатационными и техническими характеристиками, меньшей металлоемкостью и наименьшими затратами. 2 с. и 15 з.п. ф-лы, 10 ил.
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |
| US 4834353 А, 19.10.1987 | |||
| Двухкоординатный стол | 1985 |
|
SU1364427A1 |
| Координатный стол | 1970 |
|
SU356908A1 |
| КООРДИНАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173625C1 |

